ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Изобретение в целом относится к малоинвазивной интервенционной хирургии и, в частности, к технологии определения движения проволочного проводника робота в процессе интервенционной операции. Более конкретно, изобретение относится к способу и системе надежного раннего предупреждения о перемещении проволочного проводника интервенционного хирургического робота.
УРОВЕНЬ ТЕХНИКИ
Малоинвазивная интервенционная терапия - это новая область, которая в последние годы быстро развивается с включением диагностической визуализации в клиническую терапию. Обычные типы интервенционных операций требуют, чтобы врач стоял рядом с основанием катетера и выполнял соответствующее движение проволочного проводника в соответствии с изображением, полученным на основе рентгеновского излучения в реальном времени. Обычная интервенционная операция занимает от 40 минут до 1,5 часов. Врачам сложно избегать постоянного воздействия рентгеновских лучей. Особенно в Китае, где большое количество врачей, выполняющих интервенционные операции, перегружено работой, а объем операций в несколько раз выше, чем у европейских и американских врачей. Длительное мощное облучение приводит к снижению количества лейкоцитов, снижению иммунитета, потере волос и большому количеству профессиональных заболеваний, увеличению числа лейкоцитов, раку и другим заболеваниям, что создает серьезную угрозу для здоровья врачей, проводящих операции.
Для решения проблемы чрезмерного рентгеновского излучения, которым подвергается медицинский персонал во время интервенционной операции, в последние годы возникли исследования интервенционного хирургического робота, который реализует движения проволочного проводника и катетера, моделируя движения руки врача. Для врачей имеет большое клиническое значение дистанционная работа без необходимости завершать ее рядом с основанием катетера, что позволяет избежать проблемы радиации.
С другой стороны, поскольку инвазивная операция сопряжена с высоким риском обеспечение безопасности всегда будет на первом месте, особенно для хирургических устройств с дистанционным управлением, таких как интервенционные роботы. Поскольку оператор не работает непосредственно с пациентом, невозможно своевременно и эффективно оценить область хирургического вмешательства, что повышает риск при проведении операции. Необходимо избегать повреждения внутренней полости (кровеносного сосуда, не кровеносного сосуда), вызванного неожиданным перемещением проволочного проводника с помощью интеллектуальной технологии.
Следовательно, важным направлением исследований для специалистов в данной области техники является осуществление безопасного движения проволочного проводника во внутренней полости человеческого тела, чтобы преодолеть вышеупомянутые проблемы.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Изобретение обеспечивает способ и систему надежного раннего предупреждения о перемещении проволочного проводника интервенционного хирургического робота, направленную на решение проблемы, заключающейся в том, что существующее вспомогательное оборудование дистанционного управления перемещением проволочного проводника не может обеспечивать эффективное предупреждение и оценку в реальном времени опасных движений проволочного проводника. Изобретение также относится к техническому обеспечению для автоматического управления интервенционным роботом.
Таким образом, целью настоящего изобретения является обеспечение способа надежного раннего предупреждения о перемещении проволочного проводника интервенционного хирургического робота, который включает следующие этапы:
Первый этап: получение значения расстояния проволочного проводника до внутренней стенки полости тела и значения сопротивления внутренней стенки полости тела относительно проволочного проводника, когда проволочный проводник движется в полости тела.
Второй этап: управление проволочным проводником для выполнения соответствующего движения в соответствии с соотношением между значением расстояния и заданным пороговым значением расстояния и/или соотношением между значением сопротивления и заданным пороговым значением сопротивления.
Предпочтительно первый этап, в частности, включает в себя получение регистрируемых изображений проволочного проводника в полости тела, а также вычисление и анализ значения расстояния проволочного проводника до внутренней части полости тела на основе регистрируемых изображений.
Изобретение раскрывает механизм раннего предупреждения для проволочного проводника путем определения значения расстояния проволочного проводника до внутренней стенки полости и значения сопротивления внутренней стенки полости относительно проволочного проводника, когда проволочный проводника движется в полости. Изобретение реализует самокоррекцию механизма в процессе работы с использованием интервенционного хирургического робота, в отличие от существующих хирургических роботов, что позволяет повысить безопасность использования.
Предпочтительно, первый этап, в частности, включает в себя срабатывание датчика давления путем преобразования процесса движения проволочного проводника в процесс движения соединительного элемента для измерения усилия, значение перемещения соединительного элемента для измерения усилия преобразуется в значение сопротивления посредством датчика давления. Процесс определения значения давления с помощью соединительного элемента для измерения усилия и датчика давления осуществляется вне тела пациента, что не оказывает дополнительной нагрузки на движение проволочного проводника во время интервенционной роботизированной хирургии, а результаты обнаружения являются точными и надежными.
Предпочтительно, второй этап, в частности, включает в себя автоматическое прекращение движения проволочного проводника, когда значение расстояния между концом проволочного проводника и внутренней стенкой полости превышает заданное пороговое значение расстояния, а значение сопротивления превышает заданное пороговое значение сопротивления.
Предпочтительно, второй этап, в частности, включает в себя автоматическое управление проволочным проводником для продолжения текущего движения, когда значение расстояния между концом проволочного проводника и внутренней стенкой полости превышает заданное пороговое значение расстояния, в то время как значение сопротивления не превышает заданное пороговое значение сопротивления.
Предпочтительно, второй этап, в частности, включает в себя автоматическое прекращение движения проволочного проводника, когда значение сопротивления достигает заданного порогового значения сопротивления при продвижении проволочного проводника, а также выполнение голосовых подсказок и автоматическое управление обратным движением проволочного проводника до тех пор, пока значение сопротивления не станет ниже заданного порогового значения сопротивления.
Предпочтительно, второй этап, в частности, включает в себя автоматическое прекращение обратного движения проволочного проводника, когда значение сопротивления проволочного проводника достигает заданного порогового значения сопротивления; а также выполнение голосовой подсказки и автоматическое управление движением проволочного проводника до тех пор, пока значение сопротивления не станет ниже заданного порогового значения сопротивления.
Предпочтительно, второй этап, в частности, включает в себя автоматическое прекращение вращения проволочного проводника в процессе вращения проволочного проводника, когда значение сопротивления проволочного проводника достигает заданного порогового значения сопротивления; а также выполнение голосовой подсказки и автоматическое управление обратным вращением проволочного проводника до тех пор, пока значение сопротивления не станет ниже заданного порогового значения сопротивления.
Изобретение раскрывает систему надежного раннего предупреждения о движении проволочного проводника интервенционного хирургического робота. Система включает в себя устройство обнаружения изображения, устройство определения сопротивления, устройство преобразования сопротивления проволочного проводника, устройство управления интервенционным роботом.
Устройство обнаружения изображения используется для получения изображений местоположения проволочного проводника в полости тела;
устройство преобразования сопротивления проволочного проводника передает значение перемещения во время движения проволочного проводника на устройство определения сопротивления и преобразует его в различные инициирующие действия сопротивления для устройства определения сопротивления,
устройство определения сопротивления обнаруживает различные инициирующие действия сопротивления и выдает сигнал определения сопротивления;
устройство управления интервенционным роботом электрически соединено с устройством обнаружения изображения и устройством определения сопротивления для приема выявленных изображений и сигналов определения сопротивления, а также вычисления и анализа для получения значения расстояния между проволочным проводником и внутренней стенкой полости и значения сопротивления проволочного проводника от внутренней стенки полости; управляющий сигнал выводится для проволочного проводника для выполнения соответствующего движения в соответствии с соотношением между значением расстояния и заданным пороговым значением расстояния и/или соотношением между значением сопротивления и заданным пороговым значением сопротивления.
Предпочтительно, приводной механизм интервенционного робота выполнен с возможностью захвата проволочного проводника; при этом устройство определения сопротивления и устройство преобразования сопротивления проволочного проводника предусмотрены на приводном механизме интервенционного робота, и приводной механизм интервенционного робота сконфигурирован для передачи значения смещения при перемещении проволочного проводника.
Приводной механизм интервенционного робота сконфигурирован для управления перемещением проволочного проводника в соответствии с управляющим сигналом для проволочного проводника для выполнения соответствующего перемещения; перемещение включает в себя остановку, движение вперед, движение назад и вращение.
Предпочтительно, система по изобретению также включает в себя интегрированный модуль обработки звука, который обеспечивает голосовые подсказки в реальном времени, когда значение сопротивления проволочного проводника достигает заданного порогового значения сопротивления, что значительно повышает безопасность работы.
Устройство определения сопротивления и устройство преобразования сопротивления проволочного проводника способа надежного раннего предупреждения о перемещении проволочного проводника интервенционного хирургического робота согласно настоящему изобретению напрямую связаны с приводным механизмом интервенционного робота с высокой степенью системной интеграции, что позволяет достичь простого и надежного процесса определения параметров и отсутствия влияния на процесс управления движением проволочного проводника.
Способ и система надежного раннего предупреждения для перемещения проволочного проводника интервенционного хирургического робота, согласно изобретению, обладают следующими положительными эффектами:
1. Многоплановая настройка алгоритма срабатывания сигнала тревоги на основании регистрируемых изображений и определения сопротивления, что снижает частоту появления сигналов ложной тревоги.
2. Автоматическое устранение ошибок путем совершения автоматического обратного движения позволяет избежать риска несвоевременной корректировки в случае возникновения опасной ситуации из-за стресса пользователя во время работы.
3. Активное звуковое оповещение пользователей для избегания риска неосознанного неправильного использования устройства пользователями.
4. Улучшение общей автоматизации управления движением интервенционного робота.
КРАТКОЕ ОПИСАНИЕ ЧРЕТЕЖЕЙ
Для более ясной иллюстрации вариантов осуществления настоящего изобретения или технического решения в предшествующем уровне техники, ниже будет дано краткое описание вариантов осуществления или чертежей, которые будут использоваться в описании. И очевидно, что чертежи в последующем описании являются просто вариантами осуществления настоящего изобретения, и другие чертежи также могут быть получены из чертежей, предоставленных без какого-либо творческого вклада специалистами в данной области техники.
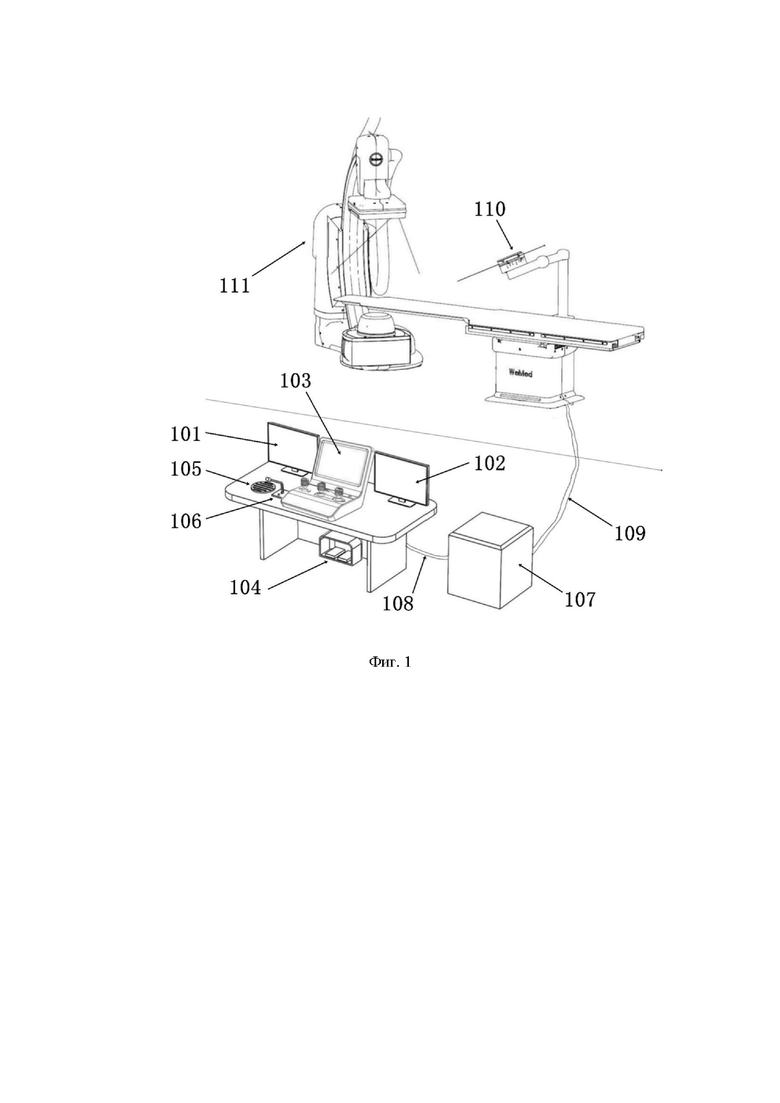
Фиг.1 - структурная схема системы надежного раннего предупреждения о перемещении проволочного проводника интервенционного робота согласно настоящему изобретению;
Фиг.2 - структурная схема устройства определения сопротивления и устройства преобразования сопротивления проволочного проводника согласно настоящему изобретению.
Фиг.3 - структурная схема терминала управления интервенционным роботом согласно настоящему изобретению.
Фиг.4 - структурная схема устройства управления интервенционным роботом согласно настоящему изобретению.
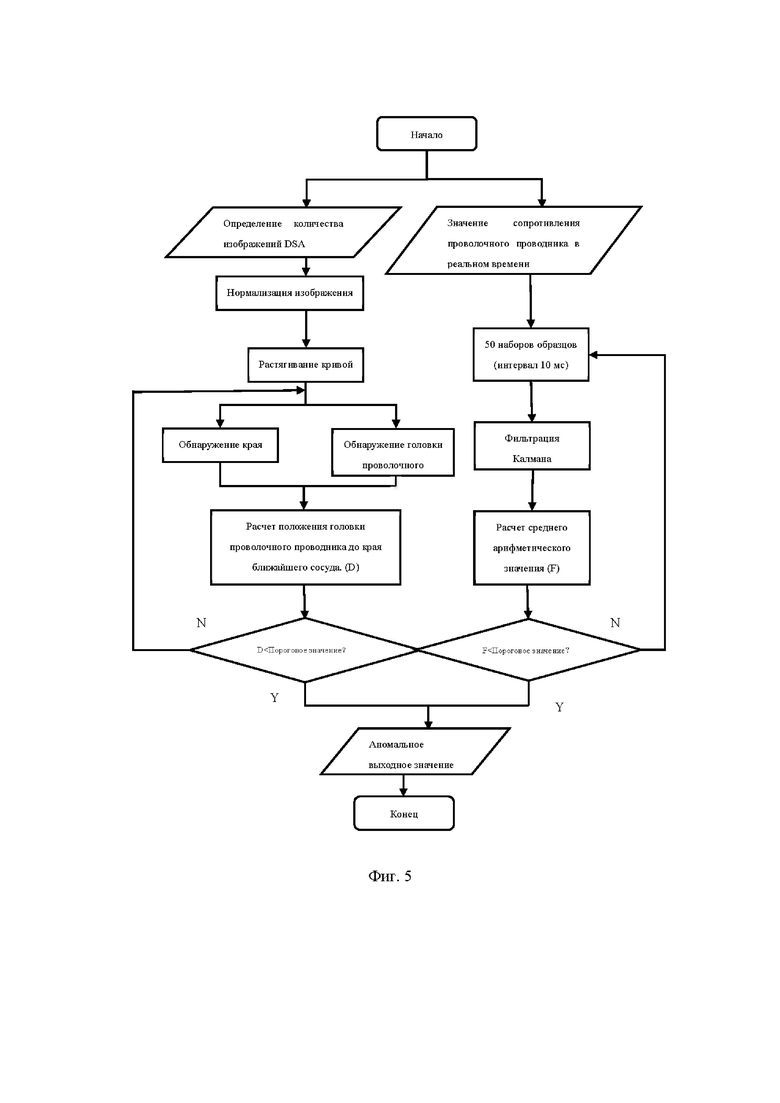
Фиг.5 - блок-схема способа раннего предупреждения о перемещении проволочного проводника интервенционного робота согласно настоящему изобретению.
На чертежах:
101, 102-экран для отображения изображений, полученных методом цифровой субтракционной ангиографии (DSA), 103-терминал управления интервенционным роботом, 104-педаль контроля облучения, 105- громкоговоритель, 106-микрофон, 107-устройство управления интервенционным роботом, 108-соединительный кабель контроллера интервенционного робота и устройства управления интервенционным роботом, 109-соединительный кабель устройства управления интервенционным роботом и интервенционного робота, 110-приводной механизм интервенционного робота, 111-оборудование для цифровой субтракционной ангиографии (DSA), 201-тумблер перемещения катетера, 202-тумблер вращения проволочного проводника, 203-тумблер перемещения проволочного проводника, 301-проволочный проводник, 302-группа кулачков, 303-первая установочная опорная пластина, 304-вторая установочная опорная пластина, 305- датчик давления, 306-соединительный элемент для измерения усилия, 307-электромагнит, 308-первый удерживающий элемент, 309-второй удерживающий элемент, 401-модуль связи, 402-карта для сбора видеоданных, 403-центральный процессор, 404-блок питания.
ДЕТАЛЬНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Далее подробно описываются варианты осуществления настоящего изобретения, проиллюстрированные на прилагаемых чертежах, на которых одинаковые или аналогичные элементы или элементы, имеющие схожие функции, обозначены одинаковыми позициями. Варианты осуществления, описанные ниже со ссылкой на прилагаемые чертежи, представлены в качестве примеров и предназначены для объяснения изобретения и не должны толковаться как ограничение объема изобретения.
В описании изобретения следует понимать, что термины «сверху», «снизу», «спереди», «сзади», «слева», «справа», «по вертикали», «по горизонтали», «верх», «низ», «внутри», «снаружи» и т.д., обозначают ориентацию или взаимное расположение элементов на показанных чертежах для облегчения описания изобретения, а не для указания или определения того, что указанные устройства или элементы должны иметь определенную ориентацию, быть сконструированы и работать в определенном положении, и, следовательно, это не следует рассматривать как ограничение объема изобретения.
Кроме того, термины «первый», «второй» используются только в целях описания и не должны толковаться как указывающие или подразумевающие относительную важность одних элементов по отношению к другим или косвенно указывающие количество технических признаков. Таким образом, признак, определенный как «первый» или «второй», может включать в себя один или несколько прямых или косвенных признаков. В описании настоящего изобретения «множественное число» означает два или больше двух, если специально не определено иное.
В настоящем изобретении, если иное явно не указано и не определено, термины «установить», «соединить» и «зафиксировать» следует понимать в широком смысле. Например, неподвижное соединение или разъемное соединение, или выполненное как одно целое; механически или электрически соединенные; прямо или косвенно соединенные через промежуточный элемент, либо взаимодействующие друг с другом или воздействующие друга на друга. Специалисты в данной области техники могут понять конкретные значения приведенных выше терминов в настоящем изобретении, в зависимости от ситуации.
В настоящем изобретении, если явно не указано и не определено иное, если первый элемент расположен «сверху» или «снизу» относительно второго элемента, то первый и второй элементы могут быть в непосредственном соединении друг с другом; также возможен вариант, при котором первый и второй элементы расположены не в прямом соединении, а посредством дополнительного соединения между ними. Кроме того, слова «сверху», «над» и «на», относящиеся к первому элементу, определяют, что первый элемент находится непосредственно над вторым элементом и по диагонали над вторым элементом, или просто указывают, что первый элемент расположен выше, чем второй элемент. Если первый элемент находится «снизу», «ниже» и «под», вторым элементом, то первый элемент находит непосредственно под вторым элементом и по диагонали под вторым элементом, или просто указывает, что первый элемент расположен ниже второго элемента.
Варианты осуществления:
Обращаясь к фиг.1-5 подробно описаны способ и система надежного раннего предупреждения о перемещении проволочного проводника интервенционного хирургического робота в соответствии с вариантом осуществления настоящего изобретения.
Ссылаясь на фиг.1 и 4, раскрывается система надежного раннего предупреждения о движении проволочного проводника интервенционного хирургического робота. Система включает в себя устройство обнаружения изображения, устройство определения сопротивления, устройство преобразования сопротивления проволочного проводника, терминал управления интервенционным роботом 103, педаль контроля облучения 104, устройство управления интервенционным роботом 107, соединительный кабель контроллера интервенционного робота и устройства управления интервенционным роботом 108, соединительный кабель устройства управления интервенционным роботом и интервенционного робота 109, приводной механизм интервенционного робота 110.
Устройство обнаружения изображения используется для получения изображений местоположения проволочного проводника в полости тела. Может использоваться оборудование для цифровой субтракционной ангиографии (DSA) 111, и оборудование для цифровой субтракционной ангиографии (DSA) 111 содержит карту для сбора видеоданных 402 для отбора ангиографических изображений.
Устройство преобразования сопротивления проволочного проводника передает значение перемещения во время движения проволочного проводника на устройство определения сопротивления и преобразует его в различные инициирующие действия сопротивления для устройства определения сопротивления.
Устройство определения сопротивления выявляет различные инициирующие действия сопротивления и выдает сигнал определения сопротивления, который передается в центральный процессор 403 устройства управления интервенционным роботом 107 через модуль связи 401.
Устройство управления интервенционным роботом 107 электрически соединено с устройством обнаружения изображения и устройством определения сопротивления для приема выявленных изображений и сигналов определения сопротивления. Центральный процессор 403 вычисляет и анализирует значение расстояния проволочного проводника до внутренней стенки полости и значение сопротивления стенки полости по отношению к проволочному проводнику и выводит управляющий сигнал для проволочного проводника, чтобы выполнить соответствующее перемещение в соответствии со значением зависимости между значением расстояния и заданным пороговым значением расстояния, и/или значением сопротивления и заданным пороговым значением сопротивления. Устройство управления интервенционным роботом 107 также имеет блок питания 404 для подачи электропитания на центральный процессор 403 и соответствующие элементы системы.
Приводной механизм интервенционного робота 110 принимает сигналы управления, генерируемые устройством управления интервенционным роботом 107, чтобы реализовать процесс автоматического управления, и принимает сигналы управления, посланные терминалом управления интервенционным роботом 103, чтобы реализовать процесс ручного управления.
Устройство управления интервенционным роботом 107 подключено к двум экранам для отображения изображений, полученных методом цифровой субтракционной ангиографии (DSA) 101, 102 с помощью оборудования для цифровой субтракционной ангиографии 111.
Устройство управления интервенционным роботом 107 также подключено к громкоговорителю 105, микрофону 106, выполняющих функции голосовых подсказок и ввода звуковой информации.
Обращаясь к фиг.2, проволочный проводник 301 зажат между двумя группами первых удерживающих элементов 308 и вторых удерживающих элементов 309. Первый удерживающий элемент 308 может скользить в направлении длины проволочного проводника 301 под действием двигателя, обеспечивающего питание для двух групп удерживающих элементов интервенционного хирургического робота для попеременного проталкивания и вытягивания проволочного проводника. Второй удерживающий элемент 309 перемещается перпендикулярно длине проволочного проводника 301 под действием двигателя, обеспечивающего питание для двух групп удерживающих элементов интервенционного хирургического робота для попеременного проталкивания и вытягивания проволочного проводника. Первый удерживающий элемент 308 и второй удерживающий элемент 309 могут скользить вверх и вниз в направлении, параллельном зажимной поверхности первого удерживающего элемента 308, под действием двигателя, обеспечивающего питание двух удерживающих элементов интервенционного хирургического робота для вращения проволочного проводника. Устройство преобразования сопротивления проволочного проводника установлено на одной стороне первого удерживающего элемента 308. Устройство преобразования сопротивления проволочного проводника включает в себя разборную конструкцию и соединительный элемент для измерения усилия 306, соединенный с разборной конструкцией, в которой разборная конструкция содержит электромагнит 307, а электромагнит 307 притягивает и фиксирует второй удерживающий элемент 309 и соединительный элемент для измерения усилия 306 в целом. Два датчика давления 305 надежно закреплены на первой установочной опорной пластине 303 и второй установочной опорной пластине 304. Первая установочная опорная пластина 303 и вторая установочная опорная пластина 304 могут перемещаться в продольном направлении проволочного проводника 301 под действием двигателя, для приведения в действие датчика давления 305, соединительного элемента для измерения усилия 306, разборной конструкции, первого удерживающего элемента 308 и второго удерживающего элемента 309 для осуществления возвратно-поступательного движения, чтобы проталкивать и вытягивать проволочный проводник в полости тела человека. После зажатия проволочного проводника 301 соединительный элемент для измерения усилия 306, разборная конструкция, первый удерживающий элемент 308 и второй удерживающий элемент 309 соединяются с возможностью скольжения с первой установочной опорной пластиной 303/второй установочной опорной пластиной 304 как подвижный блок, а также способ соединения включает в себя установку соединительного элемента для измерения усилия 306 на первой установочной опорной пластине 303/второй установочной опорной пластине 304 через ползун и направляющую; второй удерживающий элемент 309 может быть соединен с первой установочной опорной пластиной 303 / второй установочной опорной пластиной 304 с помощью одной и того же способа соединения для того, чтобы поддерживать синхронное перемещение с соединительным элементом для измерения усилия. Вышеупомянутая конструкция используется для обеспечения микроперемещения относительно датчика давления 305, когда проволочный проводник 301 подвергается сопротивлению.
Соединительный элемент для измерения усилия 306 имеет две выпуклые кромки, расположенные напротив друг друга, при этом направление выпуклых кромок совпадает с направлением расположения проволочного проводника 301. Чувствительный конец датчика давления 305 расположен между двумя выпуклыми кромками и контактирует с ними, при изменении усилия на проволочном проводнике 301 небольшая деформация будет передаваться датчику давления 305 через соединительный элемент для измерения усилия 306, чтобы измерить изменение усилия.
Две группы кулачков 302, управляемые шаговым двигателем для вращения вокруг одной оси, расположены позади первой установочной опорной пластины 303 и второй установочной опорной пластины 304, чтобы толкать первую установочную опорную пластину 303 и вторую установочную опорную пластину 304 так, чтобы перемещать поочередно в направлении, перпендикулярном проволочному проводнику 301, тем самым осуществляя альтернативное движение первого удерживающего элемента 308 для выполнения автоматического попеременного зажима и ослабления проволочного проводника.
Обращаясь к фиг.3, терминал управления интервенционным роботом 103 снабжен тумблером перемещения катетера 201, тумблером вращения проволочного проводника 202 и тумблером перемещения проволочного проводника 203 для ручного управления выходными управляющими сигналами, подаваемыми на приводной механизм интервенционного робота 110.
Обращаясь к фиг.5 раскрыты другие варианты осуществления способа надежного раннего предупреждения о перемещении проволочного проводника интервенционного хирургического робота.
Первый этап: получение значения расстояния проволочного проводника до внутренней стенки полости тела и значения сопротивления внутренней стенки полости тела относительно проволочного проводника, когда проволочный проводник движется в полости тела.
Второй этап: управление проволочным проводником для выполнения соответствующего движения в соответствии с соотношением между значением расстояния и заданным пороговым значением расстояния и/или соотношением между значением сопротивления и заданным пороговым значением сопротивления.
Способ определения значения расстояния и сопротивления на первом этапе включает в себя:
Получение регистрируемых изображений проволочного проводника в полости тела, затем вычисление и анализ значения расстояния проволочного проводника до внутренней части полости тела на основе регистрируемых изображений.
Срабатывание датчика давления при преобразовании процесса движения проволочного проводника в процесс движения соединительного элемента для измерения усилия, преобразование датчиком давления значения смещения соединительного элемента для измерения усилия в значение сопротивления.
Способ управления соответствующим действием проволочного проводника на втором этапе включает:
Когда расстояние между концом проволочного проводника и внутренней стенкой полости тела превышает заданное пороговое значение расстояния и значение сопротивления превышает заданное пороговое значение сопротивления, автоматическое управляющее устройство проволочного проводника останавливает проволочный проводник.
Когда расстояние между концом проволочного проводника и внутренней стенкой полости тела превышает заданное пороговое значение расстояния, но значение сопротивления не превышает заданное пороговое значение сопротивления, автоматическое управляющее устройство проволочного проводника продолжает выполнять текущее перемещение проволочного проводника.
При продвижении проволочного проводника, если значение сопротивления проволочного проводника достигает заданного порогового значения сопротивления, автоматическое управляющее устройство проволочного проводника останавливает проволочный проводник, выдает голосовую подсказку и автоматическое управляющее устройство проволочного проводника выполняет обратное движение проволочного проводника до тех пор, пока значение сопротивления не станет ниже заданного порогового значения сопротивления.
При обратном движении проволочного проводника, если значение сопротивления проволочного проводника достигает заданного порогового значения сопротивления, автоматическое управляющее устройство проволочного проводника останавливает проволочный проводник, выдает голосовые подсказки и автоматическое управляющее устройство проволочного проводника продвигает проволочный проводник вперед, пока значение сопротивления не станет ниже, чем заданное пороговое значение сопротивления.
В процессе вращения проволочного проводника, если значение сопротивления проволочного проводника достигает заданного порогового значения сопротивления, автоматическое управляющее устройство проволочного проводника прекращает вращение проволочного проводника, выдает голосовые подсказки и автоматическое управляющее устройство проволочного проводника выполняет вращение проволочного проводника в обратном направлении до тех пор, пока значение сопротивления не станет ниже заданного порогового значения сопротивления.
Принцип действия системы осуществляется следующим образом:
Когда первый удерживающий элемент 308 зажимает проволочный проводник 301, проволочный проводник приводится в движение группой кулачков 302 для перемещения. Когда проволочный проводник 301 подвергается сопротивлению во время движения, трение между поверхностью проволочного проводника и первым удерживающим элементом 308 и вторым удерживающим элементом 309 изменяется, и значение сопротивления проволочного проводника регистрируется датчиком давления 305. Значение сопротивления передается в устройство управления интервенционным роботом 107 через протокол CAN через кабель 109 с помощью приводного механизма интервенционного робота 110.
Контрольные изображения, полученные оборудованием для цифровой субтракционной ангиографии 111, передаются на устройство управления интервенционным роботом 107 в виде видеопотока HDMI через универсальный интерфейс HDMI цифровой субтракционной ангиографии через кабель 109.
После того, как центральный процессор 403 собирает текущее значение сопротивления, они сохраняются в реальном времени, сглаживаются, шумы устраняются с помощью фильтрации Калмана и текущие значения сопротивления сравниваются с предварительно установленным пороговым значением сопротивления. Если текущее значение сопротивления больше, чем заданное пороговое значение сопротивления, то возникает состояние высокого риска, и соответствующая инструкция отправляется на приводной механизм интервенционного робота 110 через кабель 109. Приводной механизм интервенционного робота 110 останавливает движение проволочного проводника, управляя внутренней группой кулачков и другими соответствующими механизмами.
Центральный процессор 403 сначала обрабатывает исходные изображения путем нормализации и растягивания кривой после сбора текущих изображений цифровой субтракционной ангиографии DSA, а затем определяет положение головки проволочного проводника и контур края стенки сосуда на основе метода морфологического обнаружения, вычисляет значение расстояния проволочного проводника до края стенки сосуда, и сравнивает текущее значение расстояния с пороговым значением расстояния, если текущее значение меньше заданного порогового значения сопротивления, то центральный процессор считает, что возникает состояние высокого риска, и отправляет соответствующую команду на приводной механизм интервенционного робота 110 через кабель 109, и приводной механизм интервенционного робота 110 останавливает соответствующее движение проволочного проводника, управляя внутренними кулачками и другими соответствующими механизмами.
В нормальных условиях три основных движения проволочного проводника (движение вперед, движение назад и вращение) управляются комбинацией трех тумблеров на терминале управления интервенционным роботом 103, и ниже приводится описание фактического процесса управления.
При использовании тумблера перемещения проволочного проводника 203 устройство управления интервенционным роботом 107 отправляет команду управления на приводной механизм интервенционного робота 110, и приводной механизм интервенционного робота 110 перемещается вперед и назад в соответствии с командой движения, в то время как устройство управления интервенционным роботом 107 одновременно анализирует значение сопротивления проволочного проводника, передаваемое приводным механизмом интервенционного робота 110, и изображения цифровой субтракционной ангиографии DSA, передаваемые оборудованием для цифровой субтракционной ангиографии DSA 111, и, как только устройство управления определяет ситуацию как опасную, он посылает команду в приводной механизм интервенционного робота 110 для управления его автоматическим движением в направлении, противоположном текущему движению, при этом для подачи сигнала тревоги роботу используется громкоговоритель 105 до тех пор, пока устройство управления интервенционным роботом 107 не проанализирует, что текущий риск устранен на основании значение сопротивления проволочного проводника, передаваемого приводным механизмом интервенционного робота 110 и изображения цифровой субтракционной ангиографии DSA, передаваемого оборудованием для цифровой субтракционной ангиографии DSA 111, и команда остановки будет отправлена приводному механизму интервенционного робота 110, чтобы остановить текущее движение и прекратить сигнал тревоги громкоговорителя 105.
При использовании тумблера вращения проволочного проводника 202 устройство управления интервенционным роботом 107 посылает команды управления на приводной механизм интервенционного робота 110, который реализует вращение проволочного проводника по часовой стрелке и против часовой стрелки в соответствии с командой движения. Устройство управления интервенционным роботом 107 синхронно выполняет анализ изображений цифровой субтракционной ангиографии DSA в соответствии со значением сопротивления проволочного проводника, передаваемым приводным механизмом интервенционного робота 110 и оборудованием для цифровой субтракционной ангиографии 111 DSA. Как только будет установлено, что возникла опасность, на приводной механизм интервенционного робота 110 будет отправлена команда для управления его автоматическим движением в направлении, противоположном текущему движению, и громкоговоритель 105 будет автоматически генерировать сигнал тревоги до тех пор, пока устройство управления интервенционным роботом 107 не проанализирует, что текущий риск был устранен, на основе значения сопротивления проволочного проводника, передаваемого посредством приводного механизма интервенционного робота, и изображений цифровой субтракционной ангиографии DSA, передаваемых оборудованием для цифровой субтракционной ангиографии 111 DSA, на приводной механизм интервенционного робота 110 будет отправлена команда остановки, чтобы остановить текущее движение и остановить сигнал тревоги громкоговорителя 105.
При использовании тумблера движения катетера 201 устройство управления интервенционным роботом 107 отправляет команды управления на приводной механизм интервенционного робота 110 и приводной механизм интервенционного робота 110 отводит катетер в соответствии с командами движения, в то время как устройство управления интервенционным роботом 107 одновременно анализирует изображения цифровой субтракционной ангиографии DSA, переданные интервенционным роботом и оборудованием для цифровой субтракционной ангиографии 111 DSA, в соответствии со значением сопротивления проволочного проводника, переданным приводным механизмом интервенционного робота 110. Как только будет установлено, что возникла опасность, устройство управления роботом отправит команду на приводной механизм интервенционного робота 110 для управления его автоматическим движением в направлении, противоположном текущему движению, и автоматически подаст сигнал тревоги через громкоговоритель 105 до тех пор, пока устройство управления интервенционным роботом 107 не проанализирует, что текущий риск был устранен, на основе значения сопротивления проволочного проводника, передаваемого приводным механизмом интервенционного робота 110, и изображений цифровой субтракционной ангиографии DSA, переданных оборудованием для цифровой субтракционной ангиографии 111 DSA, и отправит команду остановки на приводной механизм интервенционного робота 110, чтобы остановить текущее движение и остановить сигнал тревоги громкоговорителя 105.
Каждый вариант осуществления в данном описании описывается постепенно, причем каждый вариант осуществления фокусируется на отличиях от других вариантов осуществления, и одни и те же и аналогичные части в каждом варианте осуществления могут относиться друг к другу. Описание устройства, раскрытого в варианте осуществления, поскольку оно соответствует способу, раскрытому в варианте осуществления, относительно простое, и соответствующие части могут быть описаны в разделе, посвященном методам.
Вышеприведенное описание раскрытых вариантов осуществления позволяет специалистам в данной области техники реализовать или использовать настоящее изобретение. Множество модификаций этих вариантов осуществления будут очевидны специалистам в данной области техники, и общие принципы, определенные в данном документе, могут быть реализованы в других вариантах осуществления без отклонения от сущности или объема настоящего изобретения. Таким образом, изобретение не будет ограничиваться этими вариантами осуществления, показанными в данном документе, но будет подлежать самому широкому объему, согласующемуся с принципами и новыми признаками, раскрытыми в данном документе.


Изобретение относится к медицине, а именно к способам предупреждения непреднамеренного перемещения проволочного проводника интервенционного хирургического робота. Способ включает первый этап и второй этап. На первом этапе получают значения расстояния от проволочного проводника до внутренней стенки полости тела и значения сопротивления внутренней стенки полости тела перемещению проволочного проводника, когда проволочный проводник движется в полости тела. На втором этапе управляют проволочным проводником для выполнения соответствующего движения в соответствии с соотношением между значением расстояния и заданным пороговым значением расстояния и/или соотношением между значением сопротивления и заданным пороговым значением сопротивления. Когда значение расстояния между концом проволочного проводника и внутренней стенкой полости превышает заданное пороговое значение расстояния, в то время как значение сопротивления не превышает заданное пороговое значение сопротивления, осуществляют автоматическое управление проволочным проводником для продолжения текущего движения. При достижении заданного порогового значения сопротивления осуществляют автоматическое прекращение движения проволочного проводника и последующее автоматическое управление обратным движением проволочного проводника до тех пор, пока значение сопротивления не станет ниже заданного порогового значения сопротивления. Достигается эффективное предупреждение и оценка в реальном времени опасных движений проволочного проводника интервенционного хирургического робота. 5 з.п. ф-лы, 5 ил.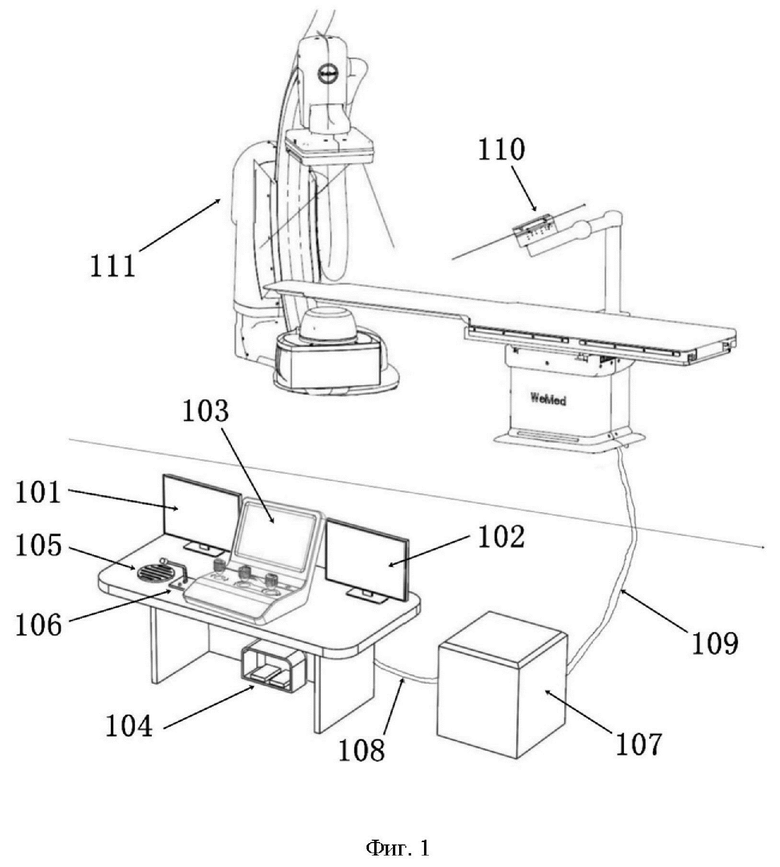
1. Способ предупреждения непреднамеренного перемещения проволочного проводника интервенционного хирургического робота, включающий
первый этап, на котором получают значения расстояния от проволочного проводника до внутренней стенки полости тела и значения сопротивления внутренней стенки полости тела перемещению проволочного проводника, когда проволочный проводник движется в полости тела;
второй этап, на котором управляют проволочным проводником для выполнения соответствующего движения в соответствии с соотношением между значением расстояния и заданным пороговым значением расстояния и/или соотношением между значением сопротивления и заданным пороговым значением сопротивления, при этом, когда значение расстояния между концом проволочного проводника и внутренней стенкой полости превышает заданное пороговое значение расстояния, в то время как значение сопротивления не превышает заданное пороговое значение сопротивления, осуществляют автоматическое управление проволочным проводником для продолжения текущего движения, а при достижении заданного порогового значения сопротивления осуществляют автоматическое прекращение движения проволочного проводника и последующее автоматическое управление обратным движением проволочного проводника до тех пор, пока значение сопротивления не станет ниже заданного порогового значения сопротивления.
2. Способ предупреждения непреднамеренного перемещения проволочного проводника интервенционного хирургического робота по п.1, отличающийся тем, что первый этап дополнительно включает:
получение регистрируемых изображений проволочного проводника в полости тела, а также вычисление и анализ значения расстояния от проволочного проводника до внутренней части полости тела на основе регистрируемых изображений.
3. Способ предупреждения непреднамеренного перемещения проволочного проводника интервенционного хирургического робота по п.1, отличающийся тем, что первый этап дополнительно включает:
срабатывание датчика давления при преобразовании процесса движения проволочного проводника в процесс движения соединительного элемента для измерения усилия, преобразование датчиком давления значения смещения соединительного элемента для измерения усилия в значение сопротивления.
4. Способ предупреждения непреднамеренного перемещения проволочного проводника интервенционного хирургического робота по п.1, отличающийся тем, что второй этап дополнительно включает:
автоматическое прекращение движения проволочного проводника, когда значение расстояния между концом проволочного проводника и внутренней стенкой полости превышает заданное пороговое значение расстояния, а значение сопротивления превышает заданное пороговое значение сопротивления.
5. Способ предупреждения непреднамеренного перемещения проволочного проводника интервенционного хирургического робота по п.1, отличающийся тем, что второй этап дополнительно включает:
автоматическое прекращение обратного движения проволочного проводника, когда значение сопротивления проволочного проводника достигает заданного порогового значения сопротивления, а также
выполнение голосовой подсказки и автоматическое управление продвижением проволочного проводника до тех пор, пока значение сопротивления не станет ниже заданного порогового значения сопротивления.
6. Способ предупреждения непреднамеренного перемещения проволочного проводника интервенционного хирургического робота по п.1, отличающийся тем, что второй этап дополнительно включает:
автоматическое прекращение вращения проволочного проводника в процессе вращения проволочного проводника, когда значение сопротивления проволочного проводника достигает заданного порогового значения сопротивления, а также
выполнение голосовой подсказки и автоматическое управление обратным вращением проволочного проводника до тех пор, пока значение сопротивления не станет ниже заданного порогового значения сопротивления.
| CN 110882060 A, 17.03.2020 | |||
| ЭЛЕКТРОМАГНИТНОЕ РЕЛЕ | 0 |
|
SU185415A1 |
| US 2020188032 A1, 18.06.2020 | |||
| CN 108013934 A, 11.05.2018 | |||
| US 10111726 B2, 30.10.2018. | |||

