[0001] Данная заявка основана на и испрашивает приоритет китайской патентной заявки №202110759048.0, поданной 5 июля 2021 г., китайской патентной заявки №202110759062.0, поданной 5 июля 2021 г., китайской патентной заявки №202111009735.7, поданной 31 августа 2021 г., и китайской патентной заявки №202111009755.4, поданной 31 августа 2021 г., раскрытия которых включены в данный документ посредством ссылки во всей полноте.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее раскрытие относится к технической области медицинских роботов, применимо к сосудистым интервенционным роботам типа «главный-подчиненный», и, в частности, относится к подчиненному устройству для интервенционного робота.
ПРЕДПОСЫЛКИ
[0003] Минимально инвазивное вмешательство на сосудах означает, что врач, руководствуясь системой цифровой субтракционной ангиографии (DSA), манипулирует движением катетера и проволочным проводником в кровеносных сосудах человека для лечения патологических изменений, чтобы достичь цели эмболизации патологических сосудов, тромболизиса, дилатации узких сосудов и тому подобного. В настоящее время интервенционная терапия сыграла важную роль в диагностике и лечении сотен заболеваний, таких как опухоли, заболевания периферических сосудов, заболевания крупных сосудов, заболевания пищеварительного тракта, заболевания нервной системы и несосудистые заболевания. Интервенционная терапия охватывает все заболевания с головы до ног человеческого организма и стала оптимальным выбором при некоторых заболеваниях. При помощи интервенционной терапии можно лечить множество заболеваний, которые нельзя было лечить в прошлом, или которые характеризовались неудовлетворительным лечебным воздействием без разреза человеческих тканей. При интервенционной терапии разрез (место пункции) имеет размер всего лишь рисового зерна. Характерными признаками интервенционной терапии являются отсутствие разреза, небольшое повреждение, быстрое восстановление и удовлетворительное лечебное воздействие, что получило высокую оценку отечественных и зарубежных медицинских кругов.
[0004] В настоящее время роботы для содействия минимально инвазивным сосудистым вмешательствам быстро развиваются вследствие привлечения высококлассного медицинского оборудования и роботизированных технологий. Мы также внесли вклад в эти исследования и разработки.
КРАТКОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0005] Технической проблемой, подлежащей решению при помощи настоящего изобретения, является предоставления подчиненного устройства для интервенционного робота, содействующего врачу при интервенционных процедурах.
[0006] С целью решения вышеуказанной технической проблемы в настоящем изобретении предоставлено подчиненное устройство для интервенционного робота. Это устройство содержит: корпус, первый приводной механизм, второй приводной механизм, третий приводной механизм и переднее зажимное приспособление, ближайшее к первому приводному механизму, которые последовательно установлены на корпусе; при этом
[0007] первый приводной механизм выполнен с возможностью зажима и вращения первого катетера и второго катетера, второй приводной механизм выполнен с возможностью зажима и вращения второго катетера и третьего катетера, и третий приводной механизм выполнен с возможностью зажима и вращения первого проволочного проводника и второго проволочного проводника; и
[0008] при вхождении первого проволочного проводника во второй катетер, второй катетер входит в первый катетер и первый проволочный проводник, второй катетер и первый катетер, соответственно, зажаты третьим приводным механизмом, вторым приводным механизмом и первым приводным механизмом и перемещаются вдоль одного осевого направления на корпусе к переднему зажимному приспособлению в требуемое положение, первый катетер, второй катетер и первый проволочный проводник, соответственно, убираются из первого приводного механизма, второго приводного механизма и третьего приводного механизма, переднее зажимное приспособление и первый приводной механизм принимают на себя зажим первого катетера и второго катетера, вызывается вхождение третьего катетера во второй катетер, вызывается вхождение второго проволочного проводника в третий катетер, и третий катетер и второй проволочный проводник зажимаются, соответственно, вторым приводным механизмом и третьим приводным механизмом и перемещаются вдоль одного осевого направления на корпусе к переднему зажимному приспособлению.
[0009] Кроме того, устройство дополнительно содержит: множество передних зажимных приспособлений; при этом множество первых катетеров по одному продвигаются при помощи первого приводного механизма в требуемые положения и, соответственно, зажимаются множеством передних зажимных приспособлений.
[0010] Кроме того, второй приводной механизм выполнен с возможностью зажима и вращения, совместно с первым приводным механизмом, первого катетера и второго катетера.
[0011] Кроме того, второй приводной механизм содержит: первый узел, выполненный с возможностью зажима и вращения первого катетера и второго катетера, и второй узел, выполненный с возможностью зажима и вращения второго катетера и третьего катетера.
[0012] Кроме того, первый узел второго приводного механизма выполнен с возможностью зажима Y-образного переходника, соединенного с первым катетером и вторым катетером, для зажима первого катетера и второго катетера, а также вращения соединителя Люэра Y-образного переходника для приведения во вращение первого катетера и второго катетера.
[0013] Кроме того, третий приводной механизм выполнен с возможностью зажима и вращения, совместно со вторым приводным механизмом, второго катетера и третьего катетера.
[0014] Кроме того, третий приводной механизм содержит: первый узел, выполненный с возможностью зажима и вращения второго катетера и третьего катетера, и второй узел, выполненный с возможностью зажима и вращения первого проволочного переходника и второго проволочного переходника.
[0015] Кроме того, первый узел третьего приводного механизма выполнен с возможностью зажима Y-образного переходника, соединенного со вторым катетером и третьим катетером, для зажима второго катетера и третьего катетера, а также вращения соединителя Люэра Y-образного переходника для приведения во вращение второго катетера и третьего катетера.
[0016] Кроме того, второй узел представляет собой подчиненный проволочный проводник и устройство скручивания катетера для интервенционного робота.
[0017] Кроме того, устройство дополнительно содержит: заднее зажимное приспособление; при этом, в случае, когда третий приводной механизм перемещается в крайнее положение, и его нужно вернуть в исходное положение для высвобождения второго проволочного проводника, заднее зажимное приспособление выполнено с возможностью зажима второго проволочного проводника для предотвращения его перемещения.
[0018] Кроме того, переднее зажимное приспособление и заднее зажимное приспособление установлены в определенном положении, соответственно, в передней части и задней части корпуса; при этом
[0019] и переднее зажимное приспособление, и заднее зажимное приспособление установлены на корпусе и являются подвижными относительно корпуса; или
[0020] одно из переднего зажимного приспособления и заднего зажимного приспособления установлено на корпусе и является подвижным относительно корпуса, а другое из переднего зажимного приспособления и заднего зажимного приспособления установлено отдельно от корпуса; или
[0021] и переднее зажимное приспособление, и заднее зажимное приспособление установлены отдельно от корпуса.
[0022] Кроме того, устройство дополнительно содержит: четвертый приводной механизм, установленный на корпусе; при этом четвертый приводной механизм выполнен с возможностью зажима и вращения, совместно с первым приводным механизмом, первого катетера и второго катетера.
[0023] Кроме того, в случае, когда первый приводной механизм перемещается в крайнее положение, и его нужно вернуть в исходное положение для высвобождения первого катетера и второго катетера, четвертый приводной механизм выполнен с возможностью зажима первого катетера и второго катетера для предотвращения их перемещения.
[0024] Кроме того, четвертый приводной механизм установлен в определенном положении между первым приводным механизмом и вторым приводным механизмом.
[0025] Кроме того, устройство дополнительно содержит: пятый приводной механизм, установленный на корпусе; при этом пятый приводной механизм выполнен с возможностью зажима и вращения, совместно со вторым приводным механизмом, второго катетера и третьего катетера.
[0026] Кроме того, в случае, когда второй приводной механизм перемещается в крайнее положение, и его нужно вернуть в исходное положение для высвобождения второго катетера и третьего катетера, пятый приводной механизм выполнен с возможностью зажима второго катетера и третьего катетера для предотвращения их перемещения.
[0027] Кроме того, пятый приводной механизм установлен в определенном положении между вторым приводным механизмом и третьим приводным механизмом.
[0028] Кроме того, четвертый приводной механизм и пятый приводной механизм перемещаются вдоль того же осевого направления, что и первый приводной механизм, второй приводной механизм и третий приводной механизм.
[0029] Кроме того, устройство дополнительно содержит: механизм замены; при этом механизм замены представляет собой механизм быстрой замены или механизм соосной замены.
[0030] Кроме того, механизм замены разъемно прикреплен к третьему приводному механизму, или механизм замены и третий приводной механизм выполнены за одно целое.
[0031] Согласно настоящему изобретению, врач может удаленно манипулировать первым приводным механизмом, вторым приводным механизмом и третьим приводным механизмом для их перемещения вдоль одного осевого направления на корпусе с целью совместного перемещения множества катетеров и множества проволочных проводников в требуемые положения. В случае замены катетера и проволочного проводника, переднее зажимное приспособление зажимает первый катетер для предотвращения его перемещения. Это блокирует излучение рентгеновских лучей и защищает здоровье человека. Дополнительно, робот может точнее управлять катетером и проволочным проводником, а также осуществлять более сложные операции, что не только снижает интенсивность работы, но и позволяет избежать грубых ошибок.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
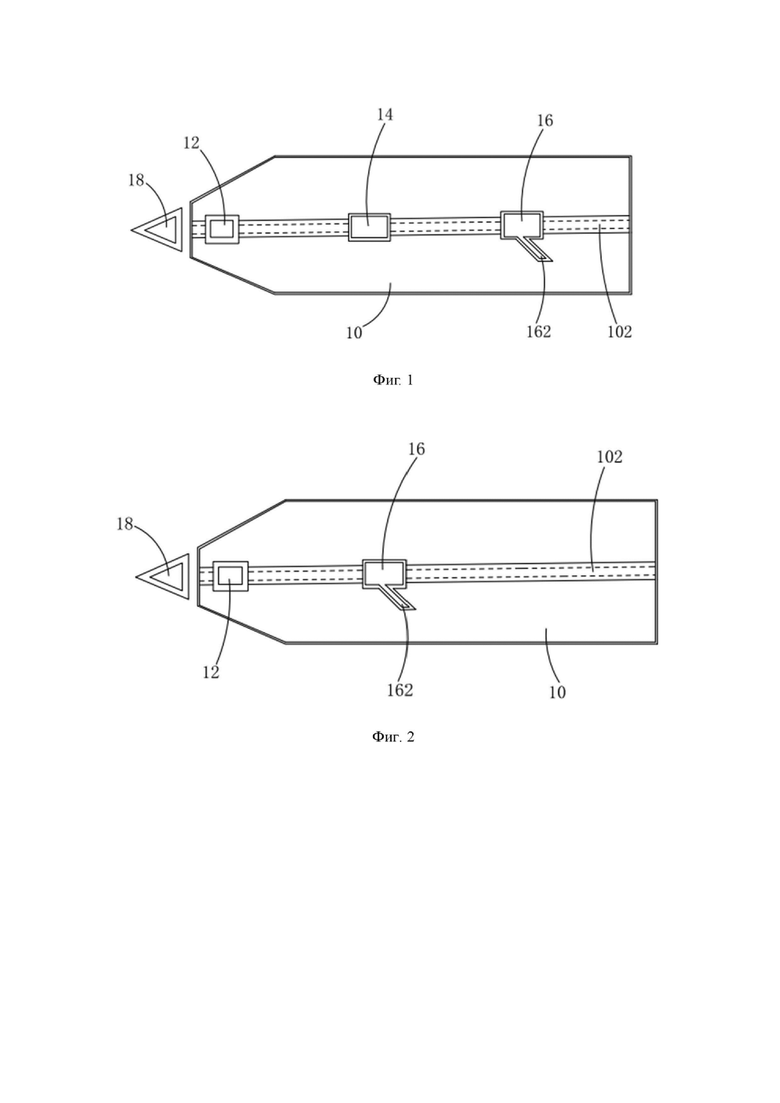
[0032] На фиг. 1 представлен схематический вид подчиненного устройства для интервенционного робота согласно первому варианту осуществления настоящего изобретения;
[0033] на фиг. 2 представлен другой схематический вид подчиненного устройства, представленного на фиг. 1;
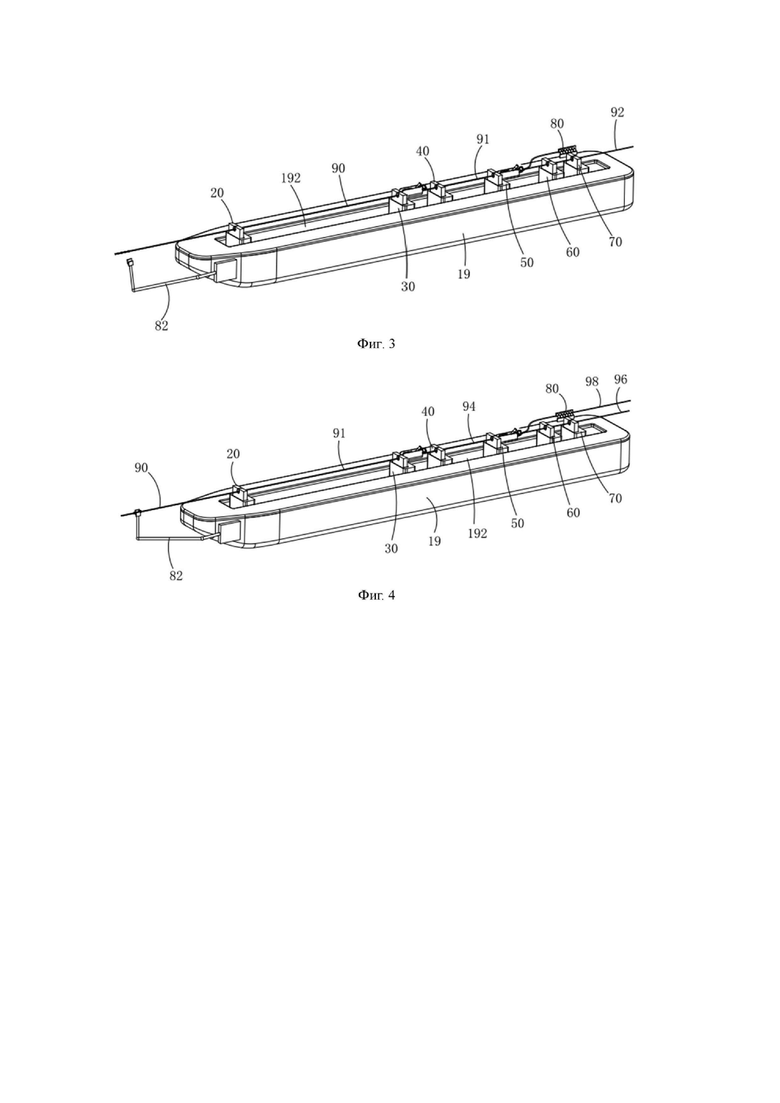
[0034] на фиг. 3 представлен схематический вид подчиненного устройства для интервенционного робота согласно второму варианту осуществления настоящего изобретения;
[0035] на фиг. 4 представлен другой схематический вид подчиненного устройства, представленного на фиг. 3;
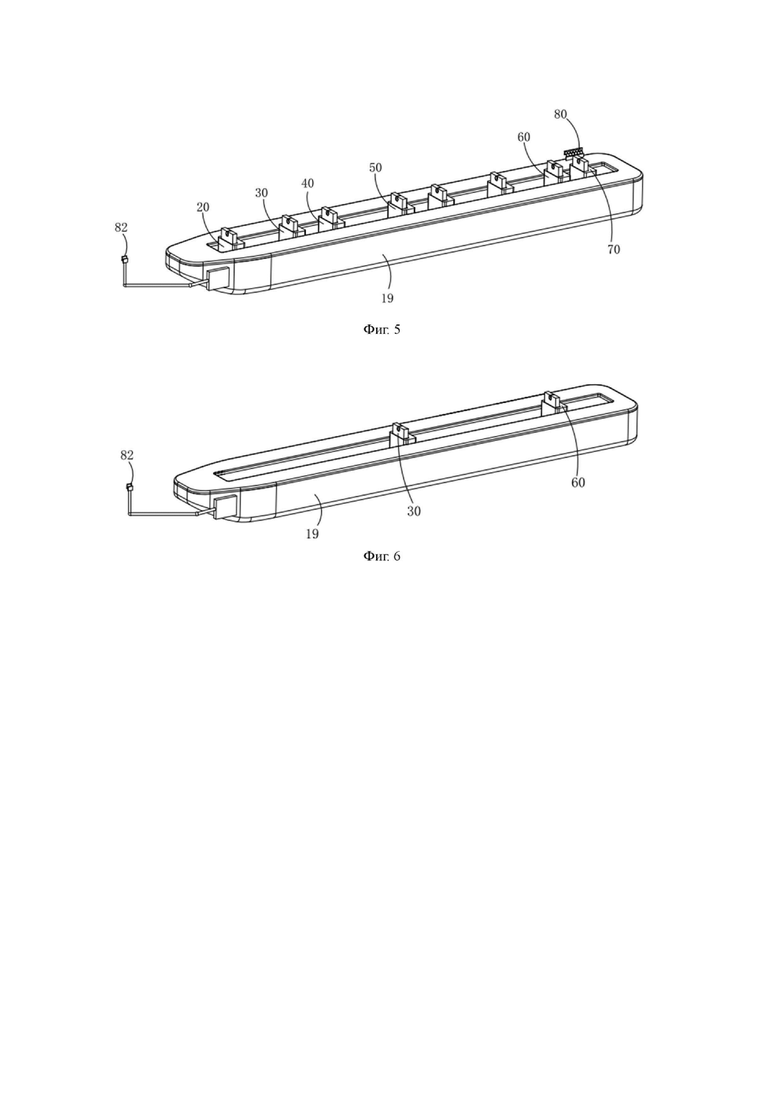
[0036] на фиг. 5 представлен схематический вид подчиненного устройства, представленного на фиг. 3, в которое добавлены два приводных механизма; и
[0037] на фиг. 6 представлен схематический вид подчиненного устройства, представленного на фиг. 3, в котором остаются только два приводных механизма.
ПОДРОБНОЕ ОПИСАНИЕ
[0038] Для ясности описания и лучшего понимания технической проблемы, подлежащей решению, технических решений и преимуществ настоящего изобретения, настоящее изобретение дополнительно подробно описано со ссылкой на сопроводительные графические материалы и конкретные варианты осуществления. Следует понимать, что варианты осуществления, описанные в данном документе, представляют собой лишь примерные варианты осуществления для иллюстрации настоящего изобретения, и они не предназначены для ограничения настоящего изобретения.
[0039] Следует отметить, что в описании настоящего изобретения, если иное не указано и не определено, термины «установленный», «связанный», «соединенный», «закрепленный» и производные от них формы следует понимать в широком смысле, который можно понять, например, как постоянное соединение, разъемное соединение, соединение за одно целое или даже как соединение с возможностью относительного перемещения; можно понять как механическое соединение или электрическое соединение, или понять как непосредственное соединение, опосредованное соединение через промежуточное средство, или как сообщение между внутренними частями двух элементов, или как взаимодействие между двумя элементами. Средние специалисты в данной области техники могут понять конкретные значения приведенных выше терминов в настоящей заявке согласно фактическим обстоятельствам и контекстам.
[0040] В описании настоящего изобретения термины «длина», «диаметр», «выше», «ниже», «передний», «задний», «левый», «правый», «вертикальный», «горизонтальный» «верхний», «нижний», «внутренний», «наружный» и т.п. указывают ориентации или взаимные расположения, которые основаны на иллюстрациях в сопроводительных графических материалах, и эти термины предназначены лишь для простоты и краткости описания, а не для указания или предположения того, что эти устройства или элементы должны иметь конкретную ориентацию, а также конструироваться и эксплуатироваться на основе этой конкретной ориентации. Соответственно, эти термины не следует толковать как ограничивающие настоящее изобретение.
[0041] Термин «удаленный от» указывает направление, обращенное к пациенту, а термин «ближайший к» указывает направление, обращенное в сторону от пациента. Термины «вверх» и «верхний» указывают направление, обращенное в сторону от направления силы тяжести, а термины «низ», «вниз» и «нижний» указывают направление, обращенное в направлении силы тяжести. Термин «вперед» указывает направление, вдоль которого проволочный проводник или катетер перемещается к телу пациента. Термин «назад» указывает направление, вдоль которого проволочный проводник или катетер перемещается из тела пациента. Термин «внутренне» указывает внутреннюю часть признака. Термин «снаружи» указывает наружную часть признака. Термин «вращение» включает «прямое вращение» и «обратное вращение», при этом «прямое вращение» указывает направление, вдоль которого проволочный проводник или катетер вращается для перемещения в тело пациента, а «обратное вращение» указывает направление, вдоль которого проволочный проводник или катетер вращается для перемещения из тела пациента.
[0042] Дополнительно, термины «первый» и «второй» используются только для описания, но их не следует понимать как указание или предположение относительной важности или неявное указание количества конкретных технических признаков. Поэтому признаки, определяемые терминами «первый» и «второй», могут явно или неявно включать один или несколько из этих признаков. Дополнительно, в описании настоящего изобретения термин «несколько», «более» или «множество» относится к по меньшей мере двум, если иное не указано.
[0043] Следует отметить, что, в отсутствие противоречий, варианты осуществления настоящего изобретения и признаки в этих вариантах осуществления могут быть объединены, и все они находятся в пределах объема защиты настоящего изобретения. Дополнительно, все или часть этапов способа могут быть выполнены в вычислительной системе, содержащей группу команд, исполняемых вычислительным устройством. Кроме того, хотя эти этапы в некоторых случаях перечислены в последовательности 1, 2, 3..., эти этапы могут также выполняться в последовательности, которая отличается от последовательности, перечисленной в данном документе.
[0044] «Проволочный проводник» в данном документе без ограничения включает проволочный проводник, микропроволочный проводник, стент и т.п., направляющий и поддерживающий интервенционные медицинские инструменты. «Катетер» без ограничения включает направляющий катетер, микрокатетер, ангиографический катетер, многофункциональный катетер (также называемый средним катетером), тромболитический катетер, катетер для баллонной дилатации, катетер для баллонорасширяемого стента и т.п. интервенционные медицинские инструменты для лечения.
[0045] Как изображено на фиг. 1 и фиг. 2, в первом варианте осуществления предоставлено подчиненное устройство для интервенционного робота. Это устройство содержит: корпус 10, приводные механизмы 12, 14 и 16, установленные на корпусе 10 с возможностью перемещения, переднее зажимное приспособление 18 и заднее зажимное приспособление (не изображено).
[0046] Корпус 10 является удлиненным и снабжен линейной направляющей 102. Приводные механизмы 12, 14 и 16 последовательно закреплены на направляющей 102 и выполнены с возможностью перемещения по направляющей 102.
[0047] Каждый из этих приводных механизмов выполнен с возможностью зажима, продвижения (включая перемещение вперед и перемещение назад) и вращения (включая прямое вращение и обратное вращение) катетера и проволочного проводника или с возможностью одновременного зажима, продвижения (включая перемещение вперед и перемещение назад) и вращения (включая прямое вращение и обратное вращение) как катетера, так и проволочного проводника с целью совместного перемещения множества катетеров и множества проволочных проводников. Конкретные конструкции приводных механизмов 12, 14 и 16 необязательно являются одинаковыми и могут отличаться одна от другой до тех пор, пока катетер и проволочный проводник можно зажимать, продвигать и/или вращать. В этом варианте осуществления конкретные конструкции приводных механизмов 14 и 16 являются одинаковыми, а приводной механизм 12 имеет другую конструкцию. Приводной механизм 14 содержит: первый узел, выполненный с возможностью содействия приводному механизму 12 в зажиме и вращении одного катетера, и второй узел, выполненный с возможностью содействия приводному механизму 12 в зажиме и вращении другого катетера. Приводной механизм 16 содержит: первый узел, выполненный с возможностью содействия второму узлу приводного механизма 14 в зажиме и вращении другого катетера, и второй узел, выполненный с возможностью содействия второму узлу приводного механизма 14 в зажиме и вращении проволочного проводника. Приводной механизм 16 содержит механизм 162 быстрой замены, выполненный с возможностью содействия первому узлу приводного механизма 16.
[0048] В этом варианте осуществления приводной механизм 12 и вторые узлы приводных механизмов 14 и 16 могут представлять собой подчиненный проволочный проводник и устройство скручивания катетера для интервенционного робота, раскрытого в китайской патентной заявке №202110674959.3, раскрытие из которой включено в данный документ посредством ссылки во всей полноте.
[0049] Переднее зажимное приспособление 18 установлено в передней части корпуса 10, ближайшей к приводным механизмам 12 и 14. Заднее зажимное приспособление установлено в определенном положении в задней части корпуса 10. За подробностями можно обратиться к описанию заднего зажимного приспособления 70. В этом варианте осуществления переднее зажимное приспособление 18 и заднее зажимное приспособление закреплены на корпусе 10 и при необходимости могут являться подвижными относительно корпуса 10. В других вариантах осуществления переднее зажимное приспособление 18 и заднее зажимное приспособление могут быть также установлены отдельно от корпуса 10.
[0050] Перед операцией необходимо выполнить некоторую подготовку. В частности, первый катетер, второй катетер и первый проволочный проводник, которые являются подходящими (например, с подходящими значениями длины и диаметра), и первый катетер и второй катетер промывают изотоническим раствором и опустошают. Второй катетер направляют в первый катетер так, что он проходит на некоторое расстояние за первый катетер, и первый проволочный проводник направляют во второй катетер так, что он проходит на некоторое расстояние за второй катетер. Например, головная часть первого проволочного проводника проходит за второй катетер на приблизительно 10 см. Приводные механизмы 12, 14 и 16 располагают в надлежащих положениях, первый катетер, второй катетер и проволочный проводник совместно размещают и направляют в интродуктор (например, в бедренную артерию, лучевую артерию и т.п.) пациента, подлежащего операции, первые узлы приводных механизмов 12 и 14 приводят во взаимодействие для зажима первого катетера, второй узел приводного механизма 14 и первый узел приводного механизма 16 приводят во взаимодействие для зажима второго катетера, и вызывают зажим вторым узлом приводного механизма 16 первого проволочного проводника. Таким образом, первый катетер, второй катетер и первый проволочный проводник являются неподвижными.
[0051] В начале операции на операционном столе главную консоль (например, главную операционную рукоятку для интервенционного робота, раскрытого в китайской патентной заявке №202110654379.8, и модуля управления на стороне управления, раскрытого в китайской патентной заявке №202110649908.5, раскрытия которых включены в данный документ посредством ссылки во всей полноте) задействуют для удаленной манипуляции с целью перемещения приводных механизмов 12, 14 и 16. Главная консоль пространственно изолирована от катетеризационного помещения, а главная консоль и катетеризационное помещение находятся в разных областях. В частности приводные механизмы 12, 14 и 16 взаимодействуют для зажима первого катетера, второго катетера и первого проволочного проводника, а также перемещения по направляющей 102 для приведения первого катетера, второго катетера и первого проволочного проводника в движение вперед, и приводные механизмы 12, 14 и 16 одновременно или неодновременно вращают первый катетер, второй катетер и первый проволочный проводник для совместного продвижения вперед первого катетера, второго катетера и первого проволочного проводника. В этом способе необходимо постоянно обеспечивать прохождение второго катетера на некоторое расстояние за первый катетер, а также прохождение первого проволочного проводника на некоторое расстояние за второй катетер. При достижении первым катетером, вторым катетером и первым проволочным проводником некоторых положений сосуда, приводными механизмами 12, 14 и 16 необходимо удаленно манипулировать при помощи главной консоли для многократного приведения первого катетера, второго катетера и первого проволочного проводника в движение вперед и назад, а также в прямое и обратное вращение для тонкой регулировки.
[0052] В этом варианте осуществления первые узлы приводных механизмов 14 и 16, соответственно, зажимают, посредством Y-образного переходника, первый катетер и второй катетер. То есть и первый катетер, и второй катетер соединены с Y-образным переходником; Y-образный переходник закреплен на приводных механизмах 14 и 16; первые узлы приводных механизмов 14 и 16 зажимают Y-образный переходник и вращают соединитель Люэра Y-образного переходника; и, при взаимодействии вторых узлов приводных механизмов 12 и 14, первый катетер и второй катетер вращаются.
[0053] При перемещении первого катетера вперед в требуемое положение, первый катетер убирают из первых узлов приводных механизмов 12 и 14; и переднее зажимное приспособление 18 зажимает первый катетер для предотвращения его перемещения. Второй катетер убирают из второго узла приводного механизма 14 и первого узла приводного механизма 16, и приводят приводные механизмы 12 и 14 в движение назад по направляющей 102 для зажима второго катетера. Приводным механизмом 16 можно манипулировать удаленно при помощи главной консоли для приведения первого проволочного проводника в движение назад, или первый проволочный проводник можно переместить назад. При перемещении первого проволочного проводника назад в интродуктор, первый проволочный проводник убирают из второго узла приводного механизма 16 и замачивают в водном растворе гепарина. Следует отметить, что в этом способе первый катетер не следует продвигать во избежание перемещения головной части первого катетера в сосуде.
[0054] Приводной механизм 16 приводят в движение назад в подходящее положение. Выбирают третий катетер (например, микрокатетер) и второй проволочный проводник, которые являются более тонкими (например, с диаметром 0,014 дюймов). Второй проволочный проводник направляют в третий катетер, который затем направляют во второй катетер, и третий катетер и второй проволочный проводник, соответственно, зажимают вторым узлом приводного механизма 14, первым узлом приводного механизма 16 и вторым узлом приводного механизма 16. Таким образом, третий катетер и второй проволочный проводник являются неподвижными. В этом варианте осуществления третий катетер соединен с Y-образным переходником; Y-образный переходник закреплен на приводном механизме 16 и зажат первым узлом приводного механизма 16; и соединитель Люэра Y-образного переходника вращается при взаимодействии со вторым узлом приводного механизма 14 для приведения третьего катетера во вращение. Что касается переднего зажимного приспособления 18, выполненного с возможностью зажима первого катетера, переднее зажимное приспособление 18 может также вращать первый катетер путем вращения соединителя Люэра Y-образного переходника.
[0055] Кроме того, приводными механизмами 12, 14 и 60 далее удаленно манипулируют для их перемещения с помощью главной консоли. За подробностями в отношении конкретного способа можно обратиться к перемещению вперед первого катетера, второго катетера и первого проволочного проводника, поэтому они в данном документе дополнительно не описаны. Перемещение второго катетера в более удаленные места сосуда осуществляют для содействия продвижению третьего катетера и второго проволочного проводника к участку поражения пациента, подлежащего операции (узкому месту сосуда), которое находится дальше. В этом способе первый катетер необходимо приводить во вращение при помощи переднего зажимного приспособления 18. Положение второго проволочного проводника определяют при помощи контрастной радиографии. При достижении вторым проволочным проводником намеченного положения (обычно второму проволочному проводнику необходимо пройти через участок поражения пациента, подлежащий операции, за исключением возможного лечения путем эмболизации аневризмы), переднее зажимное приспособление 18 и приводные механизмы 12, 14 и 16 закрепляют, соответственно, первый катетер, второй катетер, третий катетер и второй проволочный проводник. В случае, когда второму проволочному проводнику не удается достигнуть намеченного положения, приводными механизмами 12, 14 и 16 многократно манипулируют вручную с целью их перемещения до достижения вторым проволочным проводником намеченного положения.
[0056] При достижении вторым проволочным проводником намеченного положения, приводным механизмом 16 удаленно манипулируют путем использования главной консоли для приведения третьего катетера в движение назад. В это время второй проволочный проводник поддерживается как неподвижный. Например, зажим второго проволочного проводника для предотвращения его перемещения принимает на себя заднее зажимное приспособление. При перемещении головной части третьего катетера назад в интродуктор, в катетеризационном кабинете третий катетер убирают из приводных механизмов 14 и 16 и замачивают в водном растворе гепарина. В этом случае приводной механизм 16 может принимать на себя зажим второго проволочного проводника и поддерживать переднее зажимное приспособление, приводные механизмы 12 и 14, а также приводной механизм 16 как закрепляющие, соответственно, первый катетер, второй катетер и второй проволочный проводник.
[0057] В других вариантах осуществления, в случае, когда переднее зажимное приспособление 18 зажимает первый катетер для предотвращения его перемещения, приводными механизмами 12, 14 и 16 можно удаленно манипулировать с использованием главной консоли для совместного приведения второго катетера и первого проволочного проводника в движение назад. В случае перемещения головных частей второго катетера и первого проволочного проводника назад в интродуктор, в катетеризационном кабинете второй катетер и первый проволочный проводник убирают из приводных механизмов 14 и 16 и замачивают в водном растворе гепарина. Выбирают два катетера и один проволочный проводник, которые являются подходящими, и эти катетеры и проволочный проводник совместно помещают в первый катетер. Вызывают нахождение приводных механизмов 12, 14 и 16 в подходящих положениях, и приводные механизмы 12, 14 и 16 приводят во взаимодействие для зажима двух катетеров и одного проволочного проводника. Таким образом, эти два катетера и один проволочный проводник являются неподвижными. За подробностями в отношении последующего способа перемещения вперед можно обратиться к перемещению вперед первого катетера, второго катетера и первого проволочного проводника, поэтому они в данном документе дополнительно не описаны.
[0058] В других вариантах осуществления передняя часть корпуса 10 снабжена множеством передних зажимных приспособлений 18, и в этом случае первый катетер можно продвигать несколько раз. При продвижении катетера в требуемое положение, проводят зажим катетера одним из передних зажимных приспособлений 18.
[0059] В катетеризационном кабинете снова вызывают вхождение хвостовой части второго проволочного проводника в быстросменный катетер для баллонной дилатации. Быстросменный катетер для баллонной дилатации перемещается вперед наряду со вторым проволочным проводником. В этом случае механизм 162 быстрой замены зажимает быстросменный катетер для баллонной дилатации.
[0060] Кроме того, используя главную консоль, удаленно манипулируют механизмом 162 быстрой замены таким образом, что быстросменный катетер для баллонной дилатации продвигается вперед к участку поражения пациента для проведения операции (не выходя за пределы головной части второго проволочного проводника). В этом способе следует тщательно отрегулировать положение и угол второго проволочного проводника путем прямого вращения, обратного вращения, перемещения вперед и перемещения назад в соответствии с фактической необходимостью. При достижении быстросменным катетером для баллонной дилатации участка поражения пациента, подлежащего операции, быстросменный катетер для баллонной дилатации в катетеризационном кабинете заполняют контрастным веществом для предварительной дилатации, и эффект вазодилатации определяют при помощи контрастной радиографии. При достижении эффекта вазодилатации, контрастное вещество извлекают из быстросменного катетера для баллонной дилатации. Кроме того, используя главную консоль, удаленно манипулируют механизмом 162 быстрой замены для его перемещения обратно в интродуктор. В процессе перемещения назад быстросменного катетера для баллонной дилатации положение второго проволочного проводника остается неизменным. Что касается некоторых операций, вазодилатацию необходимо выполнять несколько раз. Поэтому быстросменный катетер для баллонной дилатации можно несколько раз перемещать вперед и назад.
[0061] Кроме того, в катетеризационном кабинете снова убирают быстросменный катетер для баллонной дилатации из механизма 162 быстрой замены, а затем приводят катетер для баллонорасширяемого стента в движение во второй проволочный проводник для зажима на механизме 162 быстрой замены. За подробностями в отношении конкретного способа можно обратиться к вышеописанному способу для быстросменного катетера для баллонной дилатации, поэтому они в данном документе дополнительно не описаны.
[0062] Кроме того, используя главную консоль, удаленно манипулируют механизмом 162 быстрой замены таким образом, что быстросменный катетер для баллонной дилатации продвигается по второму проволочному проводнику к участку поражения пациента, подлежащего операции (узкому месту сосуда, которое подвергается расширению). В этом способе следует точно отрегулировать положение и угол второго проволочного проводника путем прямого вращения, обратного вращения, перемещения вперед и перемещения назад в соответствии с фактической необходимостью. Когда быстросменный катетер для баллонорасширяемого стента достигает участка поражения пациента, подлежащего операции (стороны сосуда, подвергаемой расширению), положение быстросменного катетера для баллонорасширяемого стента точно регулируют, после определения заполнения быстросменного катетера для баллонорасширяемого стента контрастным веществом в катетеризационном кабинете таким образом, чтобы стент приобрел форму. Правильность размещения баллонорасширяемого стента подтверждают при помощи контрастной радиографии, т.е. контрастное вещество можно извлечь и выполнить манипуляцию механизмом 162 быстрой замены для приведения быстросменного катетера для баллонорасширяемого стента в движение назад в интродуктор, в то время как баллонорасширяемый стент остается в участке поражения пациента, подлежащего операции. В катетеризационном кабинете убирают быстросменный катетер для баллонорасширяемого стента из механизма 162 быстрой замены и помещают его в водный раствор гепарина.
[0063] Кроме того, используя главную консоль, удаленно манипулируют перемещением приводных механизмов 12, 14 и 16 для перемещения второго катетера и второго проволочного проводника назад в интродуктор. Наконец, в катетеризационном кабинете вытаскивают первый катетер в интродуктор, убирают первый катетер, второй катетер и второй проволочный проводник из переднего зажимного приспособления 18 и приводных механизмов 12, 14 и 16, замачивает их в водном растворе гепарина, а затем удаляют интродуктор и осуществляют послеоперационную обработку для завершения операции.
[0064] В вышеописанном способе используется быстросменный катетер, поэтому такой катетер необходимо зажимать, продвигать и вращать при помощи механизма 162 быстрой замены. При использовании катетера с соосной заменой, когда вызывается вхождение в катетер с соосной заменой хвостовой части второго проволочного проводника, этот катетер с соосной заменой зажимают, продвигают и вращают при помощи механизма соосной замены для перемещения катетера с соосной заменой вперед к соответствующему положению по второму проволочному проводнику или перемещения назад в интродуктор. Вне зависимости от того, используется механизм 162 быстрой замены или механизм соосной замены, зажим, продвижение и вращение быстросменного катетера и катетера с соосной заменой на практике может осуществляться при помощи роликовинтовой передачи.
[0065] За подробностями о том, как при помощи главной консоли удаленно манипулировать перемещением приводных механизмов 12, 14 и 16 и механизма 162 быстрой замены, можно обратиться к модулю управления на стороне управления для интервенционного робота, раскрытого в китайской патентной заявке №202110649908.5. Модуль управления содержит два рычага управления, при этом один рычаг управления выполнен с возможностью манипуляции приводными механизмами 12 и 14, а также механизмом 162 быстрой замены, и при помощи этого рычага управления приводными механизмами 12 и 14, а также механизмом 162 быстрой замены можно манипулировать способом с временным разделением, и другой рычаг управления выполнен с возможностью манипуляции приводным механизмом 16. Необязательно, главная консоль содержит более двух рычагов управления, например четыре рычага управления, которые соответствующим образом выполнены с возможностью удаленной манипуляции приводными механизмами 12, 14 и 16, а также механизмом 162 быстрой замены.
[0066] В приведенном выше описании способ перемещения и управления согласно настоящему изобретению был описан на примере «ангиопластики с помощью баллонорасширяемого стента». На самом деле, настоящее изобретение можно также использовать в различных процедурах, включая контрастную радиографию, эмболизацию, тромбэктомию и т.п. Приводные механизмы 12, 14 и 16, а также переднее зажимное приспособление 18 могут быть свободно приспособлены в соответствии с фактическими потребностями операции, т.е. приводные механизмы 12, 14 и 16, а также переднее зажимное приспособление 18 можно легко разбирать и собирать. При выполнении более сложных операций можно задействовать большее количество приводных механизмов и передних зажимных приспособлений. В случае, когда задействовано большее количество приводных механизмов и передних зажимных приспособлений, на практике можно использовать совместное перемещение множества катетеров, соответствующих одному проволочному проводнику или множеству проволочных проводников. Для каждого приводного механизма предусматривается механизм быстрой замены, который постоянно зажимает катетер, и он или установлен на приводном механизме с возможностью перемещения, или образован за одно целое с приводным механизмом. При выполнении простых процедур обследования используют только два из приводных механизмов, такие как приводные механизмы 12 и 16 (или приводные механизмы 12 и 14, при этом механизм быстрой замены может быть расположен на приводном механизме 14 в соответствии с фактической необходимостью), а также переднее зажимное приспособление 162. В этом случае другие приводные механизмы удаляют из корпуса 10.
[0067] Ниже описан способ управления, в котором в настоящем изобретении два катетера и один проволочный проводник совместно продвигают только два приводных механизма 12 и 16, а также переднее зажимное приспособление 162.
[0068] При подготовке к операции два катетера (толстый катетер и тонкий катетер) и два проволочных проводника (толстый проволочный проводник и тонкий проволочный проводник) с подходящими значениями диаметра и длины выбирают в соответствии с положением участка поражения сосуда, и эти два катетера промывают изотоническим раствором и опустошают. Операционный робот запускают для выполнения установки в исходное состояние. Для проведения операции пациенту ставится интродуктор. Толстый проволочный проводник направляют в толстый катетер и приводят в движение на некоторое расстояние из толстого катетера, а затем толстый проволочный проводник и толстый катетер совместно помещают в интродуктор. Первые узлы приводного механизма 12 и приводного механизма 16 приводят во взаимодействие для зажима толстого катетера (соединенного с Y-образным переходником), и вызывают зажим толстого проволочного проводника вторым узлом приводного механизма 16. Таким образом, толстый катетер и толстый проволочный проводник являются неподвижными.
[0069] В начале операции, используя главную консоль, удаленно манипулируют приводными механизмами 12 и 16 для их перемещения. Толстый катетер и толстый проволочный проводник, соответственно, совместно приводят в движение вперед к узкому месту сосуда. За подробностями об этом способе можно обратиться к вышеупомянутой «ангиопластике с помощью баллонного стента». Головные части толстого катетера и толстого проволочного проводника удерживают в пределах поля зрения изображения. В этом случае убирают толстый катетер из первых узлов приводных механизмов 12 и 16; и переднее зажимное приспособление 18 зажимает толстый катетер для предотвращения его перемещения. Следует отметить, что в этом способе толстый катетер не следует продвигать во избежание перемещения головной части толстого катетера в сосуде. Приводным механизмом 16 можно манипулировать удаленно при помощи главной консоли для приведения толстого проволочного проводника в движение назад, или толстый проволочный проводник можно переместить назад. При перемещении толстого проволочного проводника назад в интродуктор, толстый проволочный проводник убирают из второго узла приводного механизма 16 и замачивают в водном растворе гепарина.
[0070] Приводные механизмы 12 и 16 приводят в движение назад в подходящее положение. Тонкий проволочный проводник направляют в тонкий катетер, который затем направляют в толстый катетер, и тонкий катетер и тонкий проволочный проводник совместно зажимают приводными механизмами 12 и 16. Таким образом, тонкий катетер и тонкий проволочный проводник являются неподвижными. В этом варианте осуществления тонкий катетер соединен с Y-образным переходником; Y-образный переходник закреплен на приводном механизме 16 и зажат первым узлом приводного механизма 16; и при взаимодействии с приводным механизмом 14 соединитель Люэра Y-образного переходника вращается для приведения во вращение тонкого катетера.
[0071] Кроме того, используя главную консоль, удаленно манипулируют приводными механизмами 12 и 16 для их перемещения. За подробностями в отношении конкретного способа можно обратиться к перемещению вперед толстого катетера и толстого проволочного проводника, поэтому они в данном документе дополнительно не описаны. Тонкий катетер и тонкий проволочный проводник продвигают к участку поражения пациента, подлежащего операции (целевому узкому месту сосуда), которое находится дальше. Положения тонкого катетера и тонкого проволочного проводника определяют при помощи контрастной радиографии. При достижении тонким катетером и тонким проволочным проводником намеченного для них положения (обычно тонкий проволочный проводник должен пройти через участок поражения пациента, подлежащего операции, за исключением возможного лечения путем эмболизации аневризмы), тонкий катетер и тонкий проволочный проводник, соответственно, закрепляются приводными механизмами 12 и 16.
[0072] Кроме того, в катетеризационном кабинете вызывают вхождение хвостовой части тонкого проволочного проводника в быстросменный катетер для баллонорасширяемого стента. Быстросменный катетер для баллонорасширяемого стента перемещается вперед вместе с тонким проволочным проводником и входит в тонкий катетер, в частности в Y-образный переходник, с которым соединен этот тонкий катетер. В этом случае механизм 162 быстрой замены зажимает быстросменный катетер для баллонорасширяемого стента.
[0073] Кроме того, используя главную консоль, удаленно манипулируют механизмом 162 быстрой замены таким образом, что быстросменный катетер для баллонной дилатации продвигается вперед к участку поражения пациента, подлежащего операции (не выходя за пределы головной части тонкого проволочного проводника). В этом способе следует точно отрегулировать положение и угол тонкого катетера и тонкого проволочного проводника путем прямого вращения, обратного вращения, перемещения вперед и перемещения назад в соответствии с фактической необходимостью. Когда быстросменный катетер для баллонорасширяемого стента достигает участка поражения пациента, подлежащего операции, положение быстросменного катетера для баллонорасширяемого стента точно регулируют, после определения заполнения быстросменного катетера для баллонорасширяемого стентае контрастным веществом в катетеризационном кабинете таким образом, чтобы стент приобрел форму. Правильность размещения баллонорасширяемого стента подтверждают при помощи контрастной радиографии, т.е. контрастное вещество можно извлечь и выполнить манипуляцию механизмом 162 быстрой замены для приведения быстросменного катетера для баллонорасширяемого стента в движение назад в интродуктор, в то время как баллонорасширяемый стент остается в участке поражения пациента, подлежащего операции. В процессе перемещения назад быстросменного катетера для баллонорасширяемого стента положения толстого катетера, тонкого катетера и тонкого проволочного проводника остаются неизменными. В катетеризационном кабинете убирают быстросменный катетер для баллонорасширяемого стента из механизма 162 быстрой замены и помещают в водный раствор гепарина.
[0074] Кроме того, используя главную консоль, удаленно манипулируют перемещением приводных механизмов 12 и 16 для перемещения тонкого катетера и тонкого проволочного проводника назад в интродуктор. Наконец, в катетеризационном кабинете вытаскивают толстый катетер в интродуктор, убирают толстый катетер, тонкий катетер и тонкий проволочный проводник из переднего зажимного приспособления 18 и приводных механизмов 12, 14 и 16, замачивают их в водном растворе гепарина, а затем удаляют интродуктор и осуществляют послеоперационную обработку для завершения операции.
[0075] В вышеописанном способе при использовании катетера с соосной заменой, когда вызывается вхождение в катетер с соосной заменой хвостовой части тонкого проволочного проводника, этот катетер с соосной заменой зажимают, продвигают и вращают при помощи механизма соосной замены для перемещения катетера с соосной заменой вперед к соответствующему положению по тонкому проволочному проводнику или перемещения назад в интродуктор.
[0076] Как изображено на фиг. 3 и фиг. 4, во втором варианте осуществления настоящего изобретения предоставлено подчиненное устройство для интервенционного робота. Это устройство содержит: корпус 19, приводные механизмы 20, 30, 40, 50 и 60, заднее зажимное приспособление 70, механизм 80 быстрой замены и переднее зажимное приспособление 82, которые установлены на корпусе 19 с возможностью перемещения.
[0077] Корпус 19 является удлиненным и снабжен линейным каналом 192. Приводные механизмы 20, 30, 40, 50 и 60 последовательно расположены на канале 192 и выполнены с возможностью перемещения по этому каналу. В этом варианте осуществления приводные механизмы 20, 30, 40, 50 и 60 могут перемещаться непосредственно на корпусе 19. Например, на корпусе 19 закреплена линейная направляющая, и все приводные механизмы 20, 30, 40, 50 и 60 могут перемещаться по этой направляющей.
[0078] Каждый из этих приводных механизмов выполнен с возможностью зажима, продвижения (включая перемещение вперед и перемещение назад) и вращения (включая прямое вращение и обратное вращение) катетера и проволочного проводника или с возможностью одновременного зажима, продвижения (включая перемещение вперед и перемещение назад) и вращения (включая прямое вращение и обратное вращение) как катетера, так и проволочного проводника с целью совместного перемещения множества катетеров и одного проволочного проводника. Каждый из приводных механизмов содержит: зажимной узел, выполненный с возможностью зажима катетера или проволочного проводника, и вращательный узел, выполненный с возможностью вращения катетера или проволочного проводника. Вращательный узел может представлять собой активный вращательный узел или пассивный вращательный узел. Все вращательные узлы могут представлять собой активные вращательные узлы, или частично они могут представлять собой активные вращательные узлы и частично - пассивные вращательные узлы. Зажим катетеров приводными механизмами 20 и 40 не затрудняет вращение катетеров.
[0079] Зажимные узлы и вращательные узлы приводных механизмов 20, 30, 40, 50 и 60 могут представлять собой подчиненный проволочный проводник и устройство скручивания катетера для интервенционного робота, раскрытого в китайской патентной заявке №202110674959.3, раскрытие из которой включено в данный документ посредством ссылки во всей полноте.
[0080] В других вариантах осуществления конкретные конструкции приводных механизмов 20, 30, 40, 50 и 60 необязательно являются одинаковыми и могут отличаться одна от другой до тех пор, пока катетер и проволочный проводник можно зажимать, продвигать и/или вращать. Необязательно, зажимные узлы могут являться одинаковыми, а вращательные узлы могут отличаться; или зажимные узлы могут отличаться, а вращательные узлы могут являться одинаковыми; или некоторые из зажимных узлов и вращательных узлов могут являться одинаковыми, а другие из зажимных узлов и вращательных узлов могут отличаться.
[0081] В этом варианте осуществления приводные механизмы 20 и 30 находятся на расстоянии друг от друга и выполнены с возможностью взаимодействия друг с другом для зажима, продвижения и вращения одного направляющего катетера 90 (то есть первого катетера) с целью предотвращения изгиба направляющего катетера 90. Фактически, предпочтительным является синхронное продвижение направляющего катетера 90 приводными механизмами 20 и 30 для прямолинейного растягивания приводного катетера 90 без его изгиба. Аналогично, приводные механизмы 40 и 50 находятся на расстоянии друг от друга и выполнены с возможностью взаимодействия друг с другом для зажима, продвижения и вращения такого же многофункционального катетера 91 (то есть второго катетера, также называемого средним катетером). Приводной механизм 60 выполнен с возможностью зажима, продвижения и вращения проволочного проводника 92. Заднее зажимное приспособление 70 выполнено с возможностью зажима и продвижения проволочного проводника 92. Механизм 80 быстрой замены и приводной механизм 50 могут быть разъемно прикреплены друг к другу и выполнены с возможностью зажима и продвижения быстросменного катетера.
[0082] Заднее зажимное приспособление 70 установлено в определенном положении в задней части корпуса 19. Переднее зажимное приспособление 82 установлено в передней части корпуса 19, ближайшей к приводным механизмам 20 и 30. В этом варианте осуществления переднее зажимное приспособление 82 и заднее зажимное приспособление 70 закреплены на корпусе 19 и при необходимости могут являться подвижными относительно корпуса 19. В других вариантах осуществления переднее зажимное приспособление 82 и заднее зажимное приспособление 70 могут быть также установлены отдельно от корпуса 19.
[0083] При подготовке к операции необходимо выбрать направляющий катетер 90, многофункциональный катетер 91 и проволочный проводник 92, которые являются подходящими (например, с подходящими значениями длины и диаметры), и выбранный направляющий катетер 90 и многофункциональный катетер 91 промывают изотоническим раствором и опустошают. Многофункциональный катетер 91 направляют в направляющий катетер 90 для его прохождения на некоторое расстояние за направляющий катетер 90, проволочный проводник 92 направляют в многофункциональный катетер 91 для его прохождения на некоторое расстояние за многофункциональный катетер 91, например головная часть проволочного проводника 92 проходит за многофункциональный катетер 91 на приблизительно 10 см. Приводные механизмы 20, 30, 40, 50 и 60 располагают в надлежащих положениях, направляющий катетер 90, многофункциональный катетер 91 и проволочный проводник 92 совместно размещают и направляют в интродуктор (например, в бедренную артерию, лучевую артерию и т.п.) пациента, подлежащего операции, проводят зажим направляющего катетера 90 зажимными узлами приводных механизмов 20 и 30, зажим многофункционального катетера 91 зажимными узлами приводных механизмов 40 и 50 и зажим проволочного проводника 92 зажимным узлом приводного механизма 60 и задним зажимным приспособлением 70. Таким образом, направляющий катетер 90, многофункциональный катетер 91 и проволочный проводник 92 являются неподвижными.
[0084] В начале операции главную консоль (например, рабочую рукоятку управления для интервенционного робота, раскрытого в китайской патентной заявке №202110654379.8, и модуля управления на стороне управления, раскрытого в китайской патентной заявке №202110649908.5, раскрытия которых включены в данный документ посредством ссылки во всей полноте) задействуют для удаленной манипуляции с целью перемещения приводных механизмов 20, 30, 40, 50 и 60 заднего зажимного приспособления 70 и механизма 80 быстрой замены. В частности, приводные механизмы 20 и 30 совместно зажимают направляющий катетер 90 и перемещаются по каналу 192 для приведения направляющего катетера 90 в движение вперед, и вращательные узлы приводных механизмов 20 и 30 одновременно или неодновременно вращают направляющий катетер 90. В случае, когда приводной механизм 20 перемещается в крайнее положение (например, приводной механизм 20 перемещается к дальнему концу канала 192), и его нужно вернуть в исходное положение для высвобождения направляющего катетера 90, приводной механизм 30 зажимает направляющий катетер 90 для предотвращения его перемещения. При возврате приводного механизма 20 в исходное положение, ближайшее к приводному механизму 30, зажимной узел приводного механизма 20 снова зажимает направляющий катетер 90, и вызывается совместное приведение приводными механизмами 20 и 30 направляющего катетера 90 в движение вперед, и вращательные узлы приводных механизмов 20 и 30 одновременно или неодновременно вращают направляющий катетер 90. Такие действия повторяют до тех пор, пока направляющий катетер 90 не переместится в требуемое положение.
[0085] В этом способе приводные механизмы 40 и 50 одновременно или неодновременно совместно зажимают многофункциональный катетер 91 и перемещаются по каналу 192 для приведения многофункционального катетера 91 в движение вперед, и вращательные узлы приводных механизмов 40 и 50 одновременно или неодновременно вращают многофункциональный катетер 91. В случае, когда приводной механизм 40 перемещается в крайнее положение (например, расстояние от приводного механизма 40 до приводного механизма 30 приближается к пороговому значению), и его нужно вернуть в исходное положение для высвобождения многофункционального катетера 91, приводной механизм 50 зажимает многофункциональный катетер 91 для предотвращения его перемещения. При возврате приводного механизма 40 в исходное положение, ближайшее к приводному механизму 50, зажимной узел приводного механизма 40 снова зажимает многофункциональный катетер 91, вызывается совместное приведение приводными механизмами 40 и 50 многофункционального катетера 91 в движение вперед, и вращательные узлы приводных механизмов 40 и 50 одновременно или неодновременно вращают многофункциональный катетер 91. Такие действия повторяют до тех пор, пока многофункциональный катетер 91 не переместится в требуемое положение.
[0086] В вышеописанном способе приводной механизм 60 и заднее зажимное приспособление 70 одновременно или неодновременно совместно зажимают проволочный проводник 92 и перемещаются по каналу 192 для приведения проволочного проводника 92 в движение вперед, и вращательный узел приводного механизма 60 одновременно или неодновременно вращает проволочный проводник 92. В случае, когда приводной механизм 60 перемещается в крайнее положение (например, расстояние от приводного механизма 60 до приводного механизма 50 приближается к пороговому значению), и его нужно вернуть в исходное положение для высвобождения проволочного проводника 92, заднее зажимное приспособление 70 зажимает проволочный проводник 92 для предотвращения его перемещения. При возврате приводного механизма 60 в исходное положение, зажимной узел приводного механизма 60 снова зажимает проволочный проводник 92, и вызывается совместное приведение приводным механизмом 60 и задним зажимным приспособлением 70 проволочного проводника 92 в движение вперед, и вращательный узел приводного механизма 60 одновременно или неодновременно вращает проволочный проводник 92. Такие действия повторяют до тех пор, пока проволочный проводник 92 не переместится в требуемое положение. В других вариантах осуществления сначала проволочный проводник 92 зажимает только приводной механизм 60, а заднее зажимное приспособление 70 не зажимает проволочный проводник 92. При возврате приводного механизма 60 в исходное положение, проволочный проводник 92 зажимает заднее зажимное приспособление 70. В случае, когда приводной механизм 60 возвращается в исходное положение и снова зажимает проволочный проводник 92, заднее зажимное приспособление 70 высвобождает проволочный проводник 92. Эти действия повторяют таким образом, что приводной механизм 60 и заднее зажимное приспособление 70 поочередно зажимают проволочный проводник 92.
[0087] За подробностями о том, как при помощи главной консоли удаленно манипулировать перемещением приводных механизмов 20, 30, 40, 50 и 60, а также заднего зажимного приспособления 70 и механизма 80 бфстрой замены, можно обратиться к модулю управления на стороне управления для интервенционного робота, раскрытого в китайской патентной заявке №202110649908.5. Модуль управления содержит два рычага управления, при этом один рычаг управления выполнен с возможностью манипуляции приводными механизмами 20, 30, 40 и 50, а также механизмом 80 быстрой замены, и при помощи этого рычага управления приводными механизмами 20 и 30, приводными механизмами 40 и 50, а также механизмом 80 быстрой замены можно манипулировать способом с временным разделением, и другой рычаг управления выполнен с возможностью манипуляции приводным механизмом 60 и задним зажимным приспособлением 70. Необязательно, главная консоль содержит более двух рычагов управления, например четыре рычага управления, которые соответствующим образом выполнены с возможностью удаленной манипуляции приводными механизмами 20 и 30, приводными механизмами 40 и 50, приводным механизмом 60 и задним зажимным приспособлением 70, а также механизмом 80 быстрой замены.
[0088] В других вариантах осуществления приводные механизмы 30 и 50 зажимают, соответственно, направляющий катетер 90 и многофункциональный катетер 91 посредством Y-образного переходника. То есть и направляющий катетер 90 и многофункциональный катетер 91, соответственно, соединены с Y-образным переходником; Y-образный переходник прикреплен к приводным механизмам 30 и 50; и зажимные узлы приводных механизмов 30 и 50 зажимают Y-образный переходник, а вращательные узлы приводных механизмов 30 и 50 вращают соединитель Люэра Y-образного переходника для приведения направляющего катетера 90 и многофункционального катетера 91 во вращение.
[0089] В ходе совместного продвижения направляющего катетера 90, многофункционального катетера 91 и проволочного проводника 92 необходимо постоянно обеспечивать прохождение многофункционального катетера 91 на некоторое расстояние за направляющий катетер 90 и прохождение проволочного проводника 92 на некоторое расстояние за многофункциональный катетер 91. При достижении направляющим катетером 90, многофункциональным катетером 91 и проволочным проводником 92 некоторых положений сосуда, приводными механизмами 20, 30, 40, 50 и 60, а также задним зажимным приспособлением 70 необходимо удаленно манипулировать при помощи главной консоли для многократного приведения направляющего катетера 90, многофункционального катетера 91 и проволочного проводника 92 в движение вперед с целью перемещения вперед и назад, а также прямого и обратного вращения для тонкой регулировки.
[0090] При перемещении направляющего катетера 90 вперед в требуемое положение, направляющий катетер 90 является неподвижным. Для приведения проволочного проводника 92 в движение назад, при помощи главной консоли удаленно манипулируют приводным механизмом 60 и задним зажимным приспособлением 70. Способ перемещения назад аналогичен вышеописанному способу перемещения вперед. При перемещении головной части проволочного проводника 92 назад в интродуктор в катетеризационном кабинете убирают проволочный проводник 92 из зажимного узла приводного механизма 60 и заднего зажимного приспособления 70 и замачивают проволочный проводник 92 в водном растворе гепарина.
[0091] Направляющий катетер 90 убирают из зажимных узлов приводных механизмов 20 и 30; и зажим направляющего катетера 90 для предотвращения его перемещения принимает на себя переднее зажимное приспособление 82. Следует отметить, что в этом способе направляющий катетер 90 не следует продвигать во избежание перемещения головной части направляющего катетера 90 в сосуде. Многофункциональный катетер 91 убирают из зажимных узлов приводных механизмов 40 и 50, и зажим многофункционального катетера 91 принимают на себя зажимные узлы приводных механизмов 20 и 30.
[0092] В других вариантах осуществления переднее зажимное приспособление 82 может являться телескопическим и проходить из скрытого пространство туда, где необходимо зажать катетер. Что касается переднего зажимного приспособления 82, выполненного с возможностью зажима направляющего катетера 90, переднее зажимное приспособление 82 может также вращать направляющий катетер 90 путем вращения соединителя Люэра Y-образного переходника. В других вариантах осуществления передняя часть корпуса 19 снабжена множеством передних зажимных приспособлений 82, и в этом случае катетер можно продвигать несколько раз. При продвижении каждого катетера в требуемое положение, проводят зажим катетера одним из передних зажимных приспособлений 82.
[0093] Приводные механизмы 40, 50 и 60, а также заднее зажимное приспособление 70 доводят до подходящих положений. Выбирают микрокатетер 94 и микропроволочный проводник 96, которые являются более тонкими (например, с диаметром 0,014 дюймов). Микропроволочный проводник 96 направляют в микрокатетер 94, и микропроволочный проводник 96 и микрокатетер 94 направляют в многофункциональный катетер 91, и зажимают микрокатетер 94 и микропроволочный проводник 96, соответственно, зажимными узлами приводных механизмов 40 и 50, зажимным узлом приводного механизма 60 и задним зажимным приспособлением 70. Таким образом, микрокатетер 94 и микропроволочный проводник 96 являются неподвижными. В других вариантах осуществления микрокатетер 94 соединен с Y-образным переходником. Y-образный переходник прикреплен к приводному механизму 50. Зажимной узел приводного механизма 50 зажимает Y-образный переходник, и вращательный узел приводного механизма 50 вращает соединитель Люэра Y-образного переходника для приведения микрокатетера 94 во вращение.
[0094] Кроме того, используя главную консоль, удаленно манипулируют вращением приводных механизмов 20, 30, 40, 50 и 60, а также заднего зажимного приспособления 70. За подробностями в отношении конкретного способа можно обратиться к перемещению вперед направляющего катетера 90, многофункционального катетера 91 и проволочного проводника 92, поэтому они в данном документе дополнительно не описаны. Многофункциональный катетер 91 приводится в движение вперед дальше в сосуд. При перемещении микрокатетера 94 и микропроволочного проводника 96 вперед к головной части многофункционального катетера 91, микрокатетер 94 и микропроволочный проводник 96 дополнительно продвигаются к участку поражения (то есть к месту стеноза сосуда) пациента, подлежащего операции. Положение микропроволочного проводника 96 определяют при помощи контрастной радиографии. При достижении микропроволочным проводником 96 намеченного положения (обычно для операции микропроволочному проводнику 96 необходимо пройти через участок поражения пациента, подлежащего операции, за исключением возможного лечения путем эмболизации аневризмы), приводные механизмы 20 и 30, приводные механизмы 40 и 50, приводной механизм 60 и заднее зажимное приспособление 70 закрепляют, соответственно, многофункциональный катетер 91, микрокатетер 94 и микропроволочный проводник 96. В случае, когда микропроволочному проводнику 96 не удается достичь намеченного положения, приводными механизмами 20, 30, 40, 50 и 60, а также задним зажимным приспособлением 70 неоднократно удаленно манипулируют вручную для их перемещения с целью достижения микропроволочным проводником 96 намеченного положения.
[0095] В других вариантах осуществления приводными механизмами 40, 50 и 60, а также задним зажимным приспособлением 70 можно манипулировать удаленно с использованием главной консоли для совместного перемещения многофункционального катетера 91 и проволочного проводника 92 назад. При перемещении головных частей многофункционального катетера 91 и проволочного проводника 92 назад в интродуктор, в катетеризационном кабинете убирают многофункциональный катетер 91 и проволочный проводник 92 из зажимных узлов приводных механизмов 40, 50 и 60, а также из заднего зажимного приспособления 70, и замачивают в водном растворе гепарина. Затем направляющий катетер 90 убирают из зажимных узлов приводных механизмов 20 и 30; и зажим направляющего катетера 90 для предотвращения его перемещения принимает на себя переднее зажимное приспособление 82. Следует отметить, что в этом способе направляющий катетер 90 не следует продвигать во избежание перемещения головной части направляющего катетера 90 в сосуде. Выбирают два катетера и один проволочный проводник, которые являются подходящими, и эти катетеры и проволочный проводник совместно помещают в направляющий катетер 90. Вызывают нахождение приводных механизмов 20, 30, 40, 50 и 60 в подходящих положениях, зажим зажимными приспособлениями приводных механизмов 20 и 30 одного катетера, зажим зажимными узлами приводных механизмов 40 и 50 другого катетера и зажим проволочного проводника зажимным узлом приводного механизма 60 и задним зажимным приспособлением 70. Таким образом, два катетера и один проволочный проводник являются неподвижными. За подробностями в отношении последующего способа перемещения вперед можно обратиться к перемещению вперед направляющего катетера 90, многофункционального катетера 91 и проволочного проводника 92, поэтому они в данном документе дополнительно не описаны.
[0096] При достижении микропроволочным проводником 96 намеченного положения, приводными механизмами 40 и 50 удаленно манипулируют, используя главную консоль для приведения микрокатетера 94 в движение назад. В это время микропроволочный проводник 96 поддерживается как неподвижный. Например, по мере перемещения назад приводного механизма 60 зажим микропроволочного проводника 96 для предотвращения его перемещения принимает на себя заднее зажимное приспособление 70. При перемещении головной части микрокатетера 94 назад в интродуктор, в катетеризационном кабинете убирают микрокатетер 94 из приводных механизмов 40 и 50, и замачивает в водном растворе гепарина. В этом случае приводной механизм 60 может принимать на себя зажим микропроволочного проводника 96 и поддерживать переднее зажимное приспособление 82, приводные механизмы 20 и 30, а также приводной механизм 60 как закрепляющие, соответственно, направляющий катетер 90, многофункциональный катетер 91 и микропроволочный проводник 96.
[0097] Кроме того, в катетеризационном кабинете вызывают вхождение хвостовой части микропроволочного проводника 96 в быстросменный катетер 98 для баллонной дилатации. Быстросменный катетер 98 для баллонной дилатации перемещается вперед наряду с микропроволочным проводником 96. В этом случае механизм 80 быстрой замены зажимает быстросменный катетер 98 для баллонной дилатации.
[0098] Кроме того, используя главную консоль, удаленно манипулируют механизмом 80 быстрой замены таким образом, что быстросменный катетер 98 для баллонной дилатации продвигается вперед к участку поражения пациента, подлежащего операции (не выходя за пределы головной части микропроволочного проводника 96). В этом способе следует тщательно отрегулировать положение и угол микропроволочного проводника 96, путем прямого вращения, обратного вращения, перемещения вперед и перемещения назад в соответствии с фактической необходимостью. При достижении быстросменным катетером 98 для баллонной дилатации участка поражения пациента, подлежащего операции, быстросменный катетер 98 для баллонной дилатации в катетеризационном кабинете заполняют контрастным веществом для предварительной дилатации, и эффект вазодилатации определяют при помощи контрастной радиографии. При достижении эффекта вазодилатации, контрастное вещество извлекают из быстросменного катетера 98 для баллонной дилатации. Кроме того, используя главную консоль, удаленно манипулируют механизмом 80 быстрой замены для его перемещения обратно в интродуктор. В процессе перемещения назад быстросменного катетера 98 для баллонной дилатации положение микропроволочного проводника 96 остается неизменным. Что касается некоторых операций, вазодилатацию необходимо выполнять несколько раз. Поэтому быстросменный катетер для баллонной дилатации можно несколько раз перемещать вперед и назад.
[0099] Кроме того, снова в катетеризационном кабинете убирают быстросменный катетер 98 для баллонной дилатации из механизма 80 быстрой замены, а затем приводят катетер для баллонорасширяемого стента в движение в микропроволочный проводник 96 для зажима на механизме 80 быстрой замены. За подробностями в отношении конкретного способа можно обратиться к вышеописанному способу для быстросменного катетера 98 для баллонной дилатации, поэтому они в данном документе дополнительно не описаны.
[0100] Кроме того, используя главную консоль, дистанционно манипулируют механизмом 80 быстрой замены таким образом, что быстросменный катетер для баллонной дилатации продвигается по микропроволочному проводнику 96 к участку поражения пациента, подлежащего операции (узкому месту сосуда, которое подвергается расширению). В этом способе следует тщательно отрегулировать положение и угол микропроволочного проводника 96, путем прямого вращения, обратного вращения, перемещения вперед и перемещения назад в соответствии с фактической необходимостью. Когда быстросменный катетер для баллонорасширяемого стента достигает участка поражения пациента, подлежащего операции (стороны сосуда, подвергаемой расширению), положение быстросменного катетера для баллонорасширяемого стента точно регулируют, после определения заполнения быстросменного катетера для баллонорасширяемого стента контрастным веществом в катетеризационном кабинете таким образом, чтобы стент приобрел форму. Правильность размещения баллонорасширяемого стента подтверждают при помощи контрастной радиографии, т.е. контрастное вещество можно извлечь и выполнить манипуляцию механизмом 80 быстрой замены для приведения быстросменного катетера для баллонорасширяемого стента в движение назад в интродуктор, в то время как баллонорасширяемый стент остается в участке поражения пациента, подлежащего операции. В катетеризационном кабинете убирают быстросменный катетер для баллонорасширяемого стента из механизма 80 быстрой замены и помещают в водный раствор гепарина.
[0101] Кроме того, используя главную консоль, удаленно манипулирует перемещением приводных механизмов 20, 30, 40, 50 и 60, а также заднего зажимного приспособления 70 для перемещения многофункционального катетера 91 и микропроволочного проводника 96 назад в интродуктор. Наконец, в катетеризационном кабинете убирают многофункциональный катетер 91 и микропроволочный проводник 96 из зажимных узлов приводных механизмов 20, 30 и 60, а также из заднего зажимного приспособления 70, убирают направляющий катетер 90 из переднего зажимного приспособления 82, вытаскивают многофункциональный катетер 91, микропроволочный проводник 96 и направляющий катетер 90 из интродуктора и помещают в водный раствор гепарина, а затем удаляют интродуктор и осуществляют послеоперационную обработку для завершения операции.
[0102] В вышеописанном способе используется быстросменный катетер, поэтому такой катетер необходимо зажимать, продвигать и вращать при помощи механизма 80 быстрой замены. При использовании катетера с соосной заменой, когда вызывается вхождение в катетер с соосной заменой хвостовой части микропроволочного проводника 96, этот катетер с соосной заменой зажимают, продвигают и вращают при помощи механизма соосной замены для перемещения катетера с соосной заменой вперед к соответствующему положению по микропроволочному проводнику 96 или перемещения назад в интродуктор. Вне зависимости от того, используется механизм 80 быстрой замены или механизм соосной замены, зажим, продвижение и вращение быстросменного катетера и катетера с соосной заменой на практике может осуществляться при помощи роликовинтовой передачи.
[0103] В приведенном выше описании способ перемещения и управления согласно настоящему изобретению был описан на примере «ангиопластики с помощью баллонорасширяемого стента». На самом деле, настоящее изобретение можно также использовать в различных процедурах, включая контрастную радиографию, эмболизацию, тромбэктомию и т.п. Приводные механизмы 20, 30, 40, 50 и 60, заднее зажимное приспособление 70 и механизм 80 быстрой замены могут быть свободно приспособлены в соответствии с фактическими потребностями операции, т.е. приводные механизмы 20, 30, 40, 50 и 60, заднее зажимное приспособление 70 и механизм 80 быстрой замены можно легко разбирать и собирать. При выполнении более сложных хирургических операций можно задействовать большее количество приводных механизмов, задних зажимных приспособлений и механизмов быстрой замены. В случае, когда задействовано большее количество приводных механизмов и задних зажимных приспособлений, на практике можно использовать совместное перемещение множества катетеров, соответствующих одному проволочному проводнику или множеству проволочных проводников. Как изображено на фиг. 5, для зажима и вращения большего количества катетеров добавляют два приводных механизма. За подробностями можно обратиться к вышеупомянутой «ангиопластике с помощью баллонного стента». Для каждого приводного механизма предусматривается механизм быстрой замены, который постоянно зажимает катетер, и он или установлен на приводном механизме с возможностью перемещения, или образован за одно целое с приводным механизмом. В случае выполнения простых процедур обследования, такой как процедура ангиографии, используют только два из приводных механизмов 20, 30, 40, 50 и 60, такие как приводные механизмы 30 и 60. Со ссылкой на фиг. 6, другие приводные механизмы, заднее зажимное приспособление 70 и механизм 80 быстрой замены удаляют из корпуса 19.
[0104] В приведенном выше описании главная консоль и операционный стол, на котором развернута главная консоль, находятся вне катетеризационного кабинета. Фактически, главная консоль и операционный стол также можно разворачивать в отдельном пространстве в катетеризационном кабинете до тех пор, пока можно изолировать рентгеновское излучение, и врач не подвержен рентгеновскому излучению.
[0105] Выше описано лишь то, каким образом в некоторых случаях заменить катетер и проволочный проводник. Фактически, замена катетера и проволочного проводника может полностью определяться в соответствии с фактическими потребностями операции и личными рабочими привычками. Размещение не ограничивается приведенными выше способами замены катетера и проволочного проводника.
[0106] Согласно настоящему изобретению, можно удаленно манипулировать первым приводным механизмом и вторым приводным механизмом для их перемещения вдоль одного осевого направления на корпусе с целью совместного перемещения множества катетеров и множества проволочных проводников в требуемые положения. В случае замены катетера и проволочного проводника, переднее зажимное приспособление зажимает первый катетер для предотвращения его перемещения. Это блокирует излучение рентгеновских лучей и защищает здоровье человека. Дополнительно, робот может точнее управлять катетером и проволочным проводником, что не только снижает интенсивность работы, но и позволяет избежать грубых ошибок.
[0107] Средние специалисты в данной области техники должны понять, что все или часть этапов способа могут быть реализованы программами, выдающими команды относящемуся к ним программному обеспечению. Эти программы могут храниться на машинночитаемом носителе данных, например на постоянном запоминающем устройстве, магнитном диске или постоянном запоминающем устройстве на компакт-диске. Альтернативно, все или часть этапов вышеописанных вариантов осуществления могут быть реализованы с использованием одной или нескольких интегральных схем. Соответственно, различные модули/блоки в вышеупомянутых вариантах осуществления могут быть реализованы в форме аппаратного обеспечения или в форме функциональных модулей программного обеспечения. Настоящее изобретение не ограничивается какой-либо конкретной формой аппаратного обеспечения или комбинацией программного обеспечения.
[0108] Тем не менее, многие другие варианты осуществления также могут являться доступными для реализации настоящего изобретения, и специалисты в данной области техники поймут, что различные модификации и изменения можно осуществить без выхода за пределы сущности и объема настоящего изобретения. Эти модификации и изменения находятся в пределах объема защиты, изложенного в приложенной формуле изобретения.
Выше описаны лишь иллюстративные варианты осуществления настоящего изобретения, но они не предназначены для ограничения настоящего изобретения. Любая модификация, эквивалентная замена и усовершенствование, выполненные без выхода за пределы сущности и принципа настоящего изобретения, должны находиться в пределах объема защиты настоящего изобретения.
Изобретение относится к медицинской технике, а именно к подчиненному устройству для интервенционного робота. Подчиненное устройство для интервенционного робота содержит: корпус, первый приводной механизм, второй приводной механизм, третий приводной механизм и переднее зажимное приспособление, ближайшее к первому приводному механизму, которые последовательно установлены на корпусе. Первый приводной механизм выполнен с возможностью зажима и вращения первого катетера и второго катетера. Второй приводной механизм выполнен с возможностью зажима и вращения второго катетера и третьего катетера. Третий приводной механизм выполнен с возможностью зажима и вращения первого проволочного проводника и второго проволочного проводника. При вхождении первого проволочного проводника во второй катетер, второй катетер входит в первый катетер и первый проволочный проводник, второй катетер и первый катетер, соответственно, зажаты третьим приводным механизмом, вторым приводным механизмом и первым приводным механизмом и перемещаются вдоль одного осевого направления на корпусе к переднему зажимному приспособлению в требуемое положение. Первый катетер, второй катетер и первый проволочный проводник, соответственно, убираются из первого приводного механизма, второго приводного механизма и третьего приводного механизма, переднее зажимное приспособление и первый приводной механизм принимают на себя зажим первого катетера и второго катетера. Вызывается вхождение третьего катетера во второй катетер, вызывается вхождение второго проволочного проводника в третий катетер, и третий катетер и второй проволочный проводник зажимаются, соответственно, вторым приводным механизмом и третьим приводным механизмом и перемещаются вдоль одного осевого направления на корпусе к переднему зажимному приспособлению. Техническим результатом является предоставление подчиненного устройства для интервенционного робота, содействующего врачу при интервенционных процедурах. 16 з.п. ф-лы, 6 ил.
1. Подчиненное устройство для интервенционного робота, содержащее: корпус, первый приводной механизм, второй приводной механизм, третий приводной механизм и переднее зажимное приспособление, ближайшее к первому приводному механизму, которые последовательно установлены на корпусе; при этом
первый приводной механизм выполнен с возможностью зажима и вращения первого катетера и второго катетера, второй приводной механизм выполнен с возможностью зажима и вращения второго катетера и третьего катетера, и третий приводной механизм выполнен с возможностью зажима и вращения первого проволочного проводника и второго проволочного проводника; и
при вхождении первого проволочного проводника во второй катетер, второй катетер входит в первый катетер и первый проволочный проводник, второй катетер и первый катетер, соответственно, зажаты третьим приводным механизмом, вторым приводным механизмом и первым приводным механизмом и перемещаются вдоль одного осевого направления на корпусе к переднему зажимному приспособлению в требуемое положение, первый катетер, второй катетер и первый проволочный проводник, соответственно, убираются из первого приводного механизма, второго приводного механизма и третьего приводного механизма, переднее зажимное приспособление и первый приводной механизм принимают на себя зажим первого катетера и второго катетера, вызывается вхождение третьего катетера во второй катетер, вызывается вхождение второго проволочного проводника в третий катетер, и третий катетер и второй проволочный проводник зажимаются, соответственно, вторым приводным механизмом и третьим приводным механизмом и перемещаются вдоль одного осевого направления на корпусе к переднему зажимному приспособлению.
2. Устройство по п. 1, отличающееся тем, что дополнительно содержит: передние зажимные приспособления; при этом первые катетеры, по одному продвигаемые первым приводным механизмом в требуемые положения, соответственно, зажимаются первыми зажимными приспособлениями.
3. Устройство по п. 1, отличающееся тем, что второй приводной механизм выполнен с возможностью зажима и вращения, совместно с первым приводным механизмом, первого катетера и второго катетера.
4. Устройство по п. 3, отличающееся тем, что второй приводной механизм содержит: первый узел, выполненный с возможностью зажима и вращения первого катетера и второго катетера, и второй узел, выполненный с возможностью зажима и вращения второго катетера и третьего катетера.
5. Устройство по п. 4, отличающееся тем, что первый узел второго приводного механизма выполнен с возможностью зажима Y-образного переходника, соединенного с первым катетером и вторым катетером, для зажима первого катетера и второго катетера и вращения соединителя Люэра Y-образного переходника с целью приведения первого катетера и второго катетера во вращение.
6. Устройство по любому из пп. 3-5, отличающееся тем, что третий приводной механизм выполнен с возможностью зажима и вращения, совместно со вторым приводным механизмом, второго катетера и третьего катетера.
7. Устройство по п. 6, отличающееся тем, что третий приводной механизм содержит: первый узел, выполненный с возможностью зажима и вращения второго катетера и третьего катетера, и второй узел, выполненный с возможностью зажима и вращения первого проволочного проводника и второго проволочного проводника.
8. Устройство по п. 7, отличающееся тем, что первый узел третьего приводного механизма выполнен с возможностью зажима Y-образного переходника, соединенного со вторым катетером и третьим катетером, для зажима второго катетера и третьего катетера и вращения соединителя Люэра Y-образного переходника с целью приведения второго катетера и третьего катетера во вращение.
9. Устройство по п. 1, отличающееся тем, что дополнительно содержит: четвертый приводной механизм, установленный на корпусе; при этом четвертый приводной механизм выполнен с возможностью зажима и вращения, совместно с первым приводным механизмом, первого катетера и второго катетера.
10. Устройство по п. 9, отличающееся тем, что в случае, когда первый приводной механизм перемещается в крайнее положение, и его нужно вернуть в исходное положение для высвобождения первого катетера и второго катетера, четвертый приводной механизм выполнен с возможностью зажима первого катетера и второго катетера для предотвращения их перемещения.
11. Устройство по п. 9, отличающееся тем, что четвертый приводной механизм установлен в положении между первым приводным механизмом и вторым приводным механизмом.
12. Устройство по п. 9, отличающееся тем, что дополнительно содержит: пятый приводной механизм, установленный на корпусе; при этом пятый приводной механизм выполнен с возможностью зажима и вращения, совместно со вторым приводным механизмом, второго катетера и третьего катетера.
13. Устройство по п. 12, отличающееся тем, что в случае, когда второй приводной механизм перемещается в крайнее положение, и его нужно вернуть в исходное положение для высвобождения второго катетера и третьего катетера, пятый приводной механизм выполнен с возможностью зажима второго катетера и третьего катетера для предотвращения их перемещения.
14. Устройство по п. 12, отличающееся тем, что пятый приводной механизм установлен в положении между вторым приводным механизмом и третьим приводным механизмом.
15. Устройство по п. 12, отличающееся тем, что четвертый приводной механизм и пятый приводной механизм перемещаются вдоль того же осевого направления, что и первый приводной механизм, второй приводной механизм и третий приводной механизм.
16. Устройство по п. 1, отличающееся тем, что дополнительно содержит: механизм замены; при этом механизм замены представляет собой механизм быстрой замены или механизм соосной замены.
17. Устройство по п. 16, отличающееся тем, что механизм замены разъемно прикреплен к третьему приводному механизму, или механизм замены и третий приводной механизм выполнены за одно целое.
| WO 2016204437 A1, 22.12.2016 | |||
| СПОСОБ ОБЕЗЗАРАЖИВАНИЯ И КОНСЕРВАЦИИ ВОДЫ, А ТАКЖЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2542290C2 |
| CN 107374737 A, 24.11.2017 | |||
| CN 101999941 A, 06.04.2011 | |||
| WO 2020061240 A1, 26.03.2020. | |||

