Известны двухкоординатные графические устройства, содержащие регистрирующий прибор и следящие системы для управления регистрирующим прибором по входным сигналам.
Предложенное устройство отличается тем, что оно содержит интерполятор, состоящий из запоминающих потенциометров, движки которых соединены через согласующие усилители с концами двух интерполирующих потенциометров, движки этих потенциометров, являющиеся выходами интерполятора, подключены ко входам регистрирующего прибора, причем движки всех потенциометров механически связаны с выходом следящей системы через электромагнитные муфты, соединенные через ключи и устройство управления с аналоговой вычислительной машиной. Это Позволяет строить кусочно-линейный график по значениям аналоговых сигналов в дискретные моменты времени с запоминанием значений входных сигналов на значительные интервалы времени.
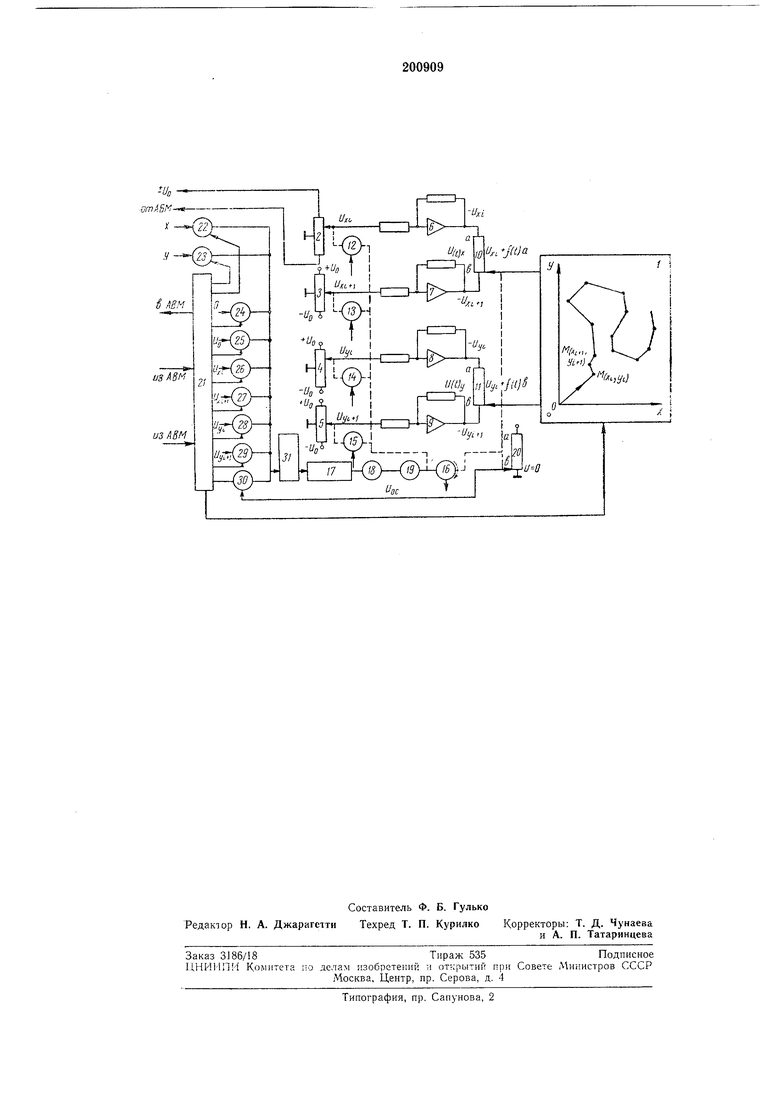
Блок-схема устройства представлена на чертеже. Оно состоит из двухкоординатного регистрирующего прибора 1 непрерывного деистВИЯ с аналоговыми входами, -соединенного с выходами интерполятора, состоящего из запоминающих потенциометров 2-5. Их движки соединены со входами согласующих усилителей 6-9, а выходы каждой пары усилителей
(6, 7 и 8, 9) подключены к концам интерполирующих потенциометров W и 11. Движки этих потенциометров являются выходами интерполятора.
Движки всех потенциометров механически связаны через электромагнитные муфты 12-16 с выходом электромеханической -следящей системы, состоящей из усилителя 17, электродвигателя 18, редуктора 19 и нотенциометра 20 обратной связн, движок которого соединен с редуктором через электромагнитную муфту 16.
С аналоговой вычислительной машиной (АВМ) устройство связано посредством блока управления 21, управляющего коммутационными ключами 22-30 и электромагнитными муфтами. На входе следящей системы установлено корректирующее звено 31.
В исходном положении пишущее устройство регистрирующего прибора находится в начале координат.
После решения первого варианта задачи на АВМ но каналу х нодается неременная Xi, а по каналу у - у . С помощью следящей системы и муфт 12 и 14 движки запоминающих потенциометров поочередно по программе блока управления устанавливавыходных клеммах усилителей 6 и 8 соответственно появляются напряжения - t/. и , а на интерполирующих потенциометрах 10 и // будут-приложены напряжения - U.- - О и -г-0, т. е. разность между последующим и предыдущим значением. На вход регистрирующего прибора будут поступать напряжения U(t)jf и t/()j, в том случае, если движки интерполирующих потенциометров 10 и У/ начнут перемещаться из положения «6 в положение «а. Следящая система, приводящая в движение движки потенциометров 10 и 11, по существу, представляет собой интерполятор с двумя выходными каналами. Если оба движка пере.мещать но одному и тому же закону, то пишущее устройство будет перемещаться по линейному закону, образуя отрезок, начинающийся в начале координат и заканчивающийся в точке с координатами (il yi)- Формирование функций U(t)j f(() -a-ij-Xi и U(t)(f.)-b+y. осуществляется следующим образом. После установки запоминающих потенциометров 2 и 4 тз требуемое положение включается муфта 16, которая кинематически подключает потенциометр 20 к выходному валу следящей системы. Одновременно с этим замьгкаются ключи 25 и 30, с помощью которых потенциометр 20 включается в цепь обратной связи и на вход следящей системы нодается опорное напряжение. Под действием входного воздействия UQ выходная коорднната следящей системы L, а также выходные напряжения потенциометров 10 и // будут изменяться по закону, определяемому -передаточной функцией замкнутой системы регулирования. Управление ключами осуществляется по «жесткой программе, так как алгоритм работы устройства остается неизменным для мнол-сества точек. Форма выходной координаты может регулироваться специальным корректирующим звеном 31, включенным в тракт системы так, чтобы обеспечить лучшие воспроизводящие условия для исполнительных каналов регистрирующего прибора, что, в свою очередь, и определит качество -вычерчивания линейного отрезка. Таким образом, при подключении f/o на вход следящей системы на регистрирующий прибор подаются одновременно две функ1ции времени, подобные по своей форме, что и определяет ;шнейный закон перемещения пищущего устройства. После решения второго варианта задачи на вход устройства подается следующая пара переменных XI + 1 и У; + 1, которая поступает на канал X и у. При ностунлении ()-й информации двилскипотенцио.метров 5 и 5 устанавливаются в соответствующее положение с помощью следящей системы и муфт. На выходах усилителей 7 и 9 появляются напряжения - t,vi-ti и - аНалогнчные величины напряжений будут и в точках b потенциометров 10 и 11. Теперь, чтобы из точки с координатами - M(Xi; У;) перейти по линейному закону в точ-ку с координатами M(XI+i; yi+ i), необходимо переместить одновременно движки потенциометров 10 н 11 в точку Ь. Эта операция выполняется аналогичным образом, как и в первом случае, с помощью следящей системы н потенциометров 10, 11 и 20. При включении муфты 16 теперь уже на вход следящей системы будет подан входной сигнал, равный нулю. Предмет изобретения Двухкоординатное графическое устройство, содержащее регистрирующий прибор, потенциометрическую следящую систему и блок управления, отличающееся тем, что, с целью построения кусочно-линейного графика по значениям аналоговых сигналов в дискретные моменты времени с запоминанием значений входных сигналов на значительные интервалы времени, оно содержит интерполятор, состоящий из запоминающих потенциометров, движки которых соединены через согласующие усилители с концами двух интерполирующих потенциометров, движки этих потенциометров, являющиеся выходами интерполятора, подключены ко входам регистрирующего прибора, причем движки всех потенциометров механически связаны с выходом следящей системы через электромагнитные муфты, соеиненные через ключи и устройство управлеия с аналоговой вычислительной машиной.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ВИЗУАЛЬНОГО ИНДИКАТОРА | 2008 |
|
RU2380762C2 |
| Интерполирующее устройство для систем программного управления фрезерным станком | 1958 |
|
SU119054A1 |
| ВСЕСОЮЗНАЯ I \ ;^ATZHni;]-'i..Xi!;ilb-. КАКи!';ВЛИОТЕКА | 1971 |
|
SU292161A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МАГИСТРАЛЬНЫМ ЭЛЕКТРОВОЗОМ | 1966 |
|
SU187079A1 |
| ТИТРОМЕТР С АВТОМАТИЧЕСКОЙ ЗАПИСЬЮ КРИВЫХ : ч г ; чТИТРОВАНИЯ^ :. -- | 1970 |
|
SU271095A1 |
| Устройство для определения частотных характеристик систем автоматического регулирования | 1971 |
|
SU443366A1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ИЗМЕРЕНИЯ И ЗАПИСИ ГОДОГРАФА ПОЛНОГО СОПРОТИВЛЕНИЯ АКУСТИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 1966 |
|
SU215543A1 |
| Линейный интерполятор | 1980 |
|
SU883925A1 |
| ДВУХКООРДИНАТНОЕ ПЛАНШЕТНОЕ РЕГИСТРИРУЮЩЕЕУСТРОЙСТВО | 1965 |
|
SU172510A1 |
| Электрический нелинейный преобразователь | 1950 |
|
SU100486A1 |