Изобретение относится к области управления электрическими машинами.
Более конкретно, изобретение относится к способу управления синхронной электрической машиной.
Синхронные электрические машины хорошо известны в автомобильной отрасли, а также в широком спектре других промышленных применений, включая сектор возобновляемой энергетики, железнодорожный транспорт и т.д.
Синхронная электрическая машина содержит неподвижную часть, называемую статором, и подвижную часть, называемую ротором. Статор содержит три обмотки, которые смещены друг относительно друга на 120° и на которые подают переменный ток.
Ротор может содержать либо обмотку, на которую подают постоянный ток, в случае синхронных электрических машин с фазным ротором (известных как WRSM), либо постоянные магниты (в случае синхронных машин с постоянными магнитами или PMSM), которые приводятся во вращение с помощью электрического поля, генерируемого обмоткой статора.
Электромагнитный крутящий момент, подаваемый электрической машиной, обуславливается величиной и ориентацией токов относительно оси ротора.
Соответственно, заданное значение крутящего момента можно выразить через заданные значения токов (или напряжений) в системе отсчета, связанной с ротором, также называемой системой отсчета ротора.
Из существующего уровня техники известно множество способов управления синхронными машинами, включая способ, описанный в документе FR3012270 на имя заявителя.
Однако эти способы из существующего уровня техники нельзя использовать для обоих типов машин WRSM и PMSM.
Более того, известные способы не позволяют одновременно сочетать устранение статической погрешности, хорошей производительности в переходном режиме и эффективную компенсацию эффектов противоэлектродвижущей силы, адаптируясь при этом к условиям насыщения напряжения и компенсации гармонических компонент токов.
Соответственно, существует потребность в способе управления для синхронной электрической машины, который можно сравнительно просто адаптировать к WRSM и PMSM, в то же время, решая вышеупомянутые проблемы.
Предложен способ управления синхронной трехфазной электрической машиной, содержащей статор и ротор, причем упомянутый способ содержит следующее:
- измеряют токи первой и второй фаз упомянутого статора;
- измеряют угловое положение ротора;
- вычисляют упомянутые токи, измеренные в системе отсчета ротора;
- вычисляют погрешность автоматического управления;
- вычисляют управляющие напряжения для электрической машины; и
- подают упомянутые управляющие напряжения на упомянутую электрическую машину.
Упомянутое вычисление управляющих напряжений выполняют в упомянутой системе отсчета ротора рекурсивно как функцию значения периода для обновления управления, значения напряжения постоянного тока и электрической угловой скорости ротора. Таким образом, можно достичь простого способа управления электрической машиной, который может быть адаптирован к синхронной машине любого типа и который решает вышеупомянутые проблемы, связанные с существующим уровнем техники.
Преимущественно, но не в качестве ограничения, упомянутые измеренные токи вычисляют в системе отсчета ротора посредством преобразования Парка. Соответственно, можно быстро и надежно преобразовать токи, измеренные в системе отсчета ротора.
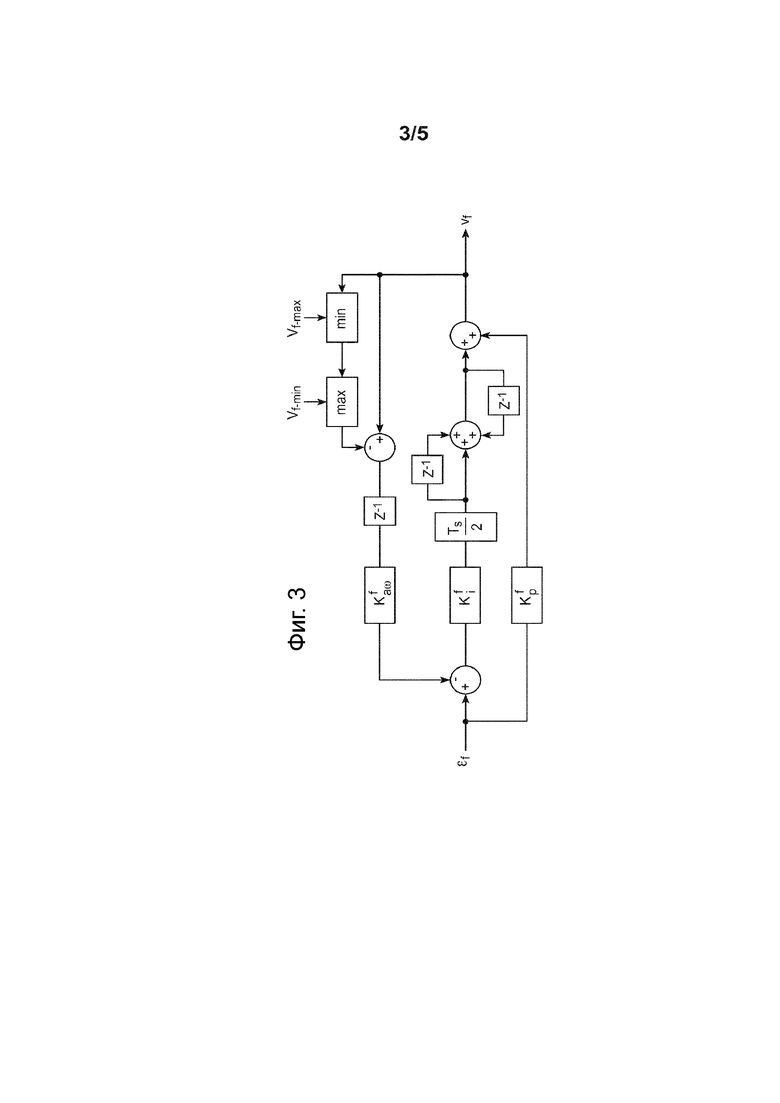
Преимущественно, но не в качестве ограничения, способ содержит этап измерения тока ротора; а вычисление управляющих напряжений включает в себя вычисление напряжения, которое необходимо приложить к фазному ротору. Соответственно, способ может быть просто адаптирован для работы на машине с фазным ротором.
Преимущественно, но не в качестве ограничения, способ содержит этап рекурсивного вычисления компенсирующих напряжений для гармоник тока. Таким образом, в дополнение ко всем вышеупомянутым преимуществам можно просто компенсировать гармоники тока.
Преимущественно, но не в качестве ограничения, упомянутый этап вычисления управляющих напряжений содержит инициализацию в 0 для целей рекурсии. Соответственно, инициализация этапов расчета управляющих напряжений является сравнительно простой.
Изобретение также относится к устройству управления синхронной трехфазной электрической машиной, содержащей статор и ротор, причем упомянутое устройство содержит:
- компонент для измерения токов первой и второй фаз упомянутого статора;
- компонент для измерения углового положения ротора;
- компонент для измерения тока ротора;
- средство для вычисления упомянутых токов, измеренных в системе отсчета ротора;
- средство для вычисления погрешности автоматического управления;
- средство для вычисления управляющих напряжений для электрической машины; и
- средство для подачи упомянутых управляющих напряжений на упомянутую электрическую машину.
Средство для вычисления управляющих напряжений подходит для выполнения упомянутого вычисления в упомянутой системе отсчета ротора рекурсивно как функции значения периода для обновления управления, значения напряжения постоянного тока и электрической угловой скорости ротора.
Изобретение также относится к электрической системе, содержащей синхронную электрическую машину, имеющую статор и фазный ротор или ротор с постоянными магнитами, электрическую аккумуляторную батарею для питания упомянутой электрической машины, трехфазный инвертор, который способен преобразовывать напряжение постоянного тока электрической аккумуляторной батареи в трехфазные управляющие напряжения для управления синхронной электрической машиной, и устройство управления описанного выше типа.
Изобретение также относится к автотранспортному средству, содержащему электрическую систему описанного выше типа.
Дополнительные признаки и преимущества изобретения вытекают из последующего описания конкретного варианта осуществления изобретения, которое приведено в качестве примера, а не ограничения, со ссылкой на прилагаемые чертежи, на которых:
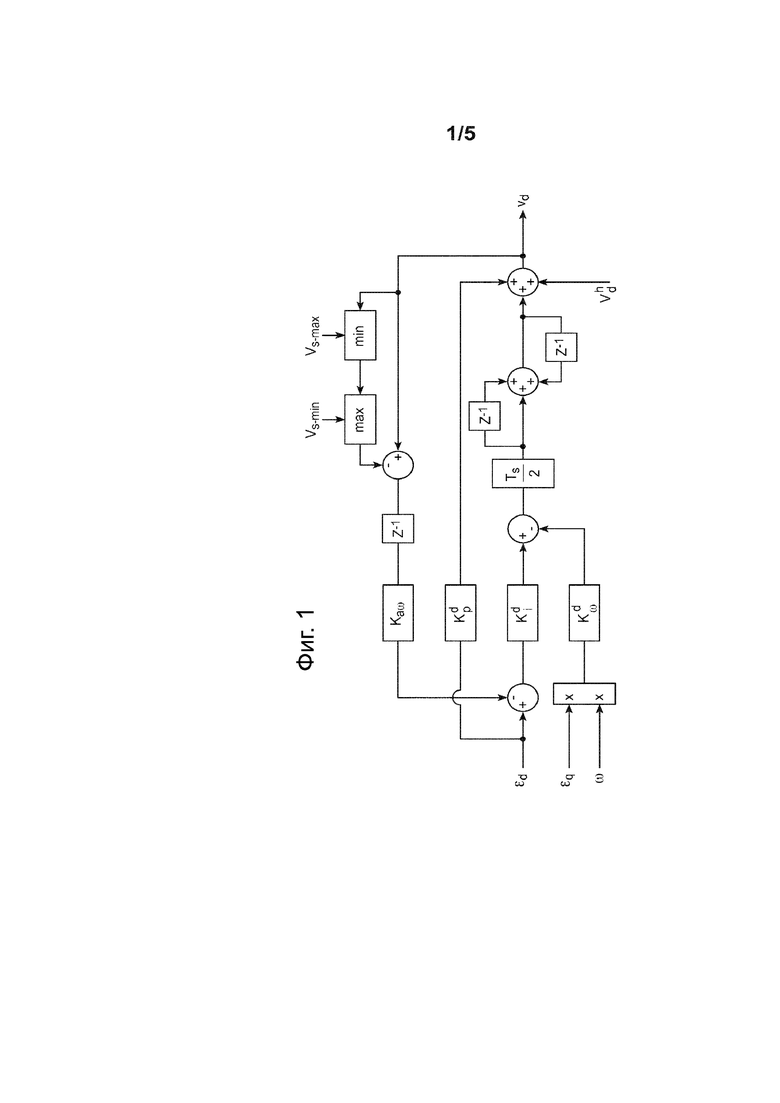
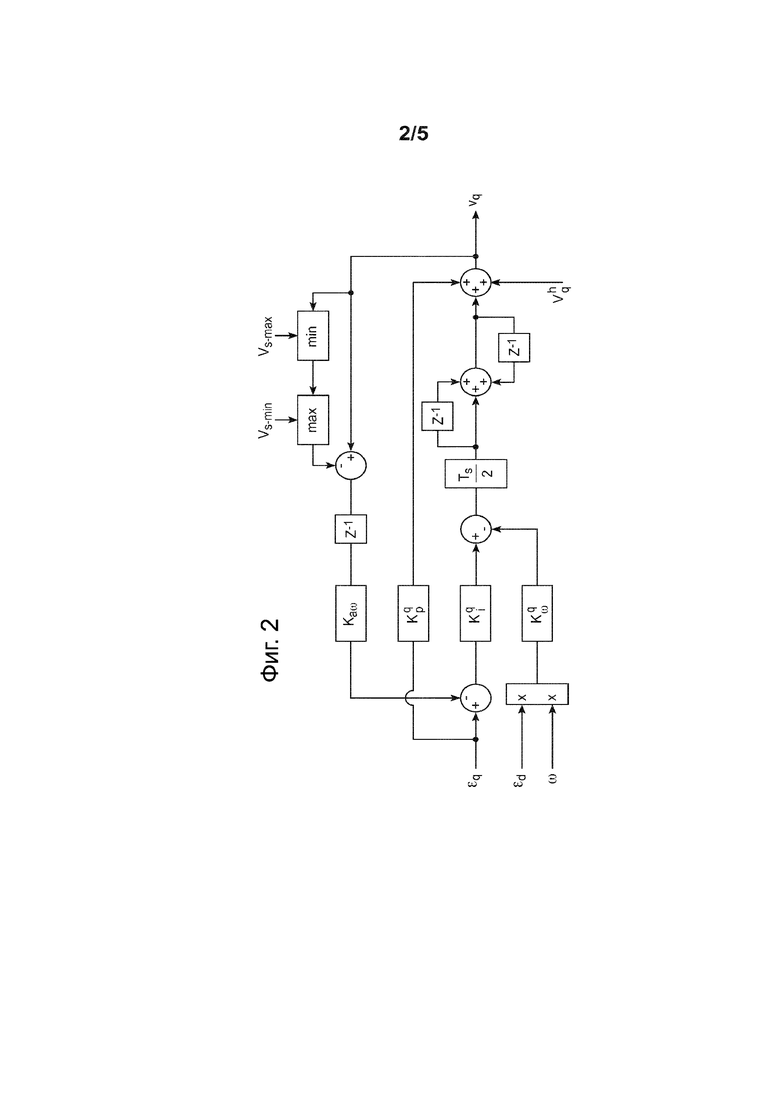
на фиг.1 и 2 показано схематическое представление этапов вычисления управляющих напряжений согласно способу в соответствии с первым и вторым вариантами осуществления изобретения для синхронной электрической машины с ротором с постоянными магнитами;
на фиг. 3 показано схематическое представление дополнительного этапа к этапам, представленным на фиг. 1 и 2, для первого варианта осуществления изобретения для управления синхронной электрической машиной с фазным ротором;
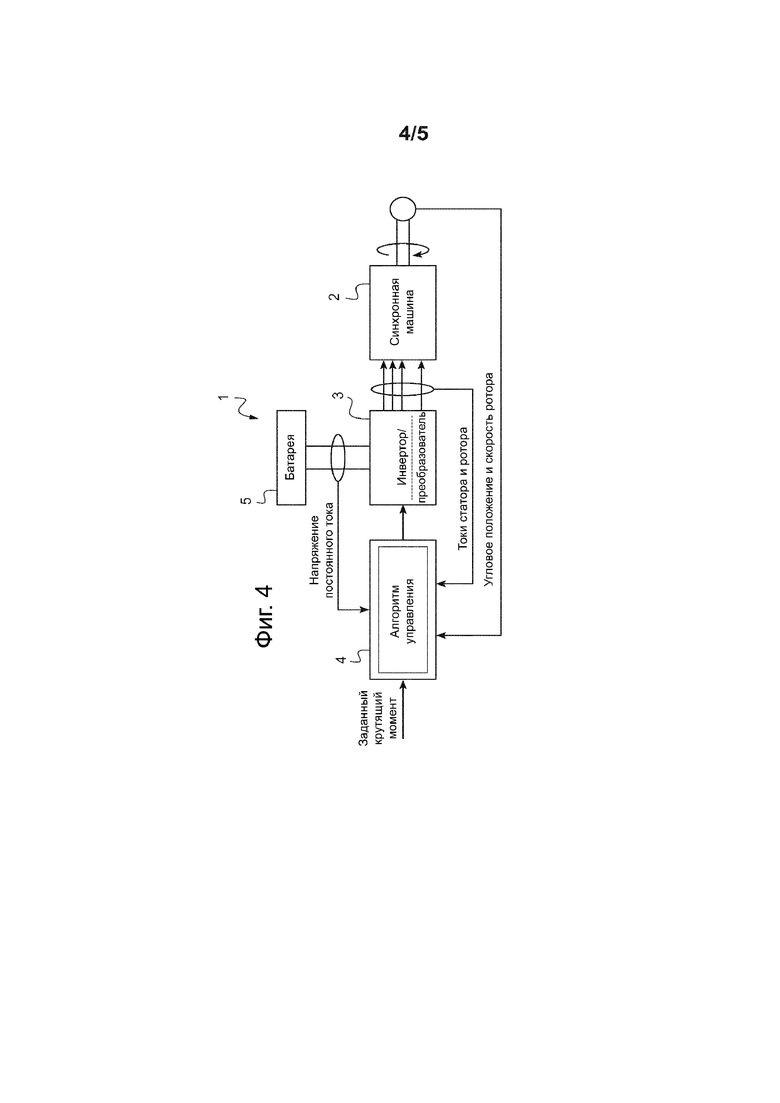
на фиг. 4 показана компоновка схемы электрической системы в соответствии с первым вариантом осуществления изобретения;
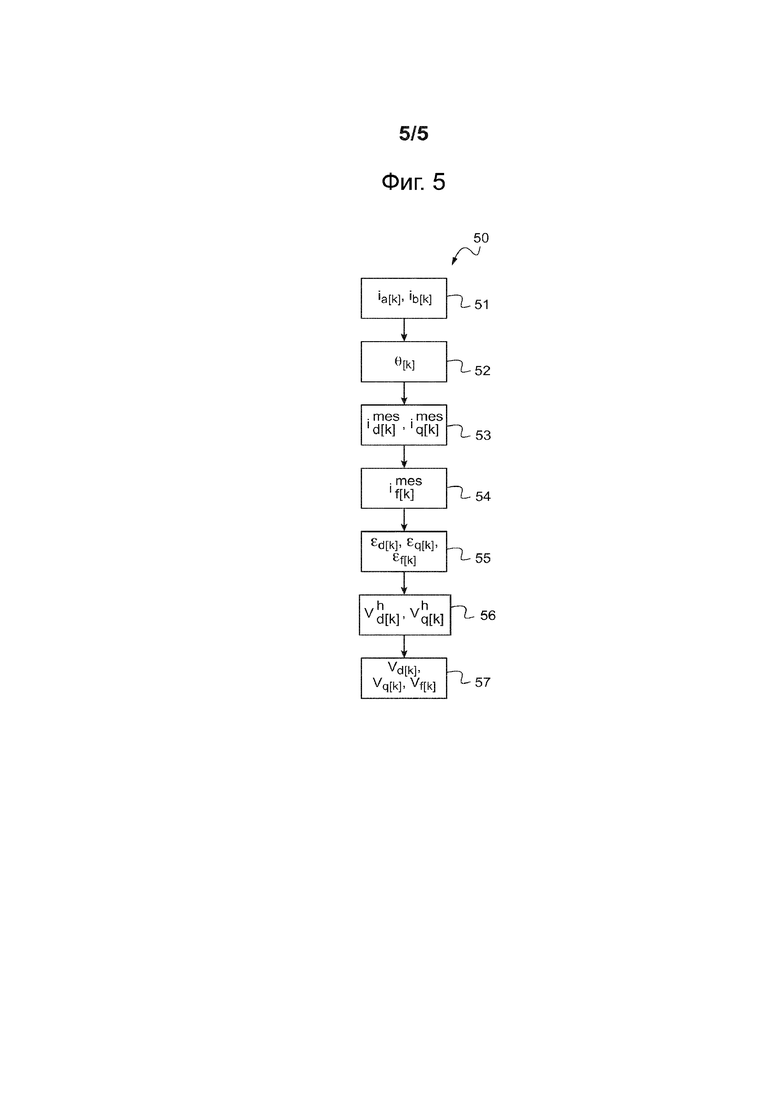
на фиг. 5 показана схема этапов способа в соответствии с первым вариантом осуществления изобретения.
Со ссылкой на фиг. 4 электрическая система содержит синхронную трехфазную электрическую машину 2, трехфазный инвертор 3, принимающий управляющие напряжения статора, и конвертер постоянного тока в постоянный ток (DC-DC), также описанный как преобразователь, который может принимать управляющее напряжение ротора, которое подают на ротор.
Посредством ввода трехфазный инвертор 3 получает напряжение постоянного тока VDC от электрической аккумуляторной батареи 5, и им управляет управляющее устройство 4 для выполнения способа управления электрической машиной.
Задача способа управления в соответствии с изобретением со ссылкой на фиг. 1-5 состоит в том, чтобы управлять инвертором 3 таким образом, чтобы он генерировал управляющие напряжения для подачи на статор и ротор (на ротор, если электрическая машина 2 представляет собой машину с фазным ротором) электрической машины 2.
Следовательно, устройство управления пригодно для передачи на инвертор управляющих напряжений, которые требуется подавать на электрическую машину 2; в этом случае действие инвертора 3 путем коммутации его силовых переключателей генерирует необходимые управляющие напряжения из напряжения VDC постоянного тока электрической батареи.
Инвертором 3 управляют независимо, чтобы генерировать управляющие напряжения для электрической машины из напряжения VDC постоянного тока, как того требует способ управления в соответствии с изобретением. Кроме того, специалистам в данной области техники известны различные технологии управления инвертором, которые не являются объектом изобретения, такие как технологии "широтно-импульсной модуляции", также известные под английским сокращением "PWM".
Устройство 4 управления в этом варианте осуществления изобретения представляет собой микроконтроллер или микропроцессор. Кроме того, устройство 4 управления выполняет способ в соответствии с собственной частотой синхроимпульсов и выполняет этапы способа дискретным и повторяющимся образом.
Устройство 4 управления также содержит оперативную память, которая позволяет запоминать результаты вычислений и измерений для способа, выполненного в предыдущие моменты времени k-1, k-2 и т.д., чтобы иметь возможность выполнить его в следующий момент времени k. На практике, поскольку способ в соответствии с изобретением имеет рекурсивный характер, необходимо иметь возможность доступа к результатам выполнения способа в предыдущие моменты времени.
Способ управления электрической машиной, выполняемый устройством 4 управления, содержит первый этап 51 измерения токов первой и второй фаз статора.
В этом случае измерение 51 фазовых токов выполняют с помощью измерительных компонентов, таких как амперметры, установленных последовательно в первых двух фазах между инвертором 3 и электрической машиной 2.
В способе также выполняют этап 52 измерения положения ротора, которое можно измерить 52 с помощью датчика положения, оптического датчика, индуктивного датчика или любого другого средства, известного специалисту в данной области техники.
В первом варианте осуществления изобретения электрическая машина содержит фазный ротор, так что выполняют дополнительное измерение 54 тока ротора аналогично измерению первых двух фаз статора.
Токи в первых двух фазах статора, которые более просто будут описаны здесь как токи статора, преобразуют затем в систему отсчета (d, q), связанную с ротором, также описанную как система отсчета ротора.
Для преобразования токов статора, измеренных в момент времени k в системе отсчета ротора, в этом варианте осуществления используют преобразование Парка.
Таким образом, на основе измерения 52 двух токов статора  и
и  и измерения угла θ ротора вычисляют 53 токи
и измерения угла θ ротора вычисляют 53 токи  путем применения преобразования Парка:
путем применения преобразования Парка:

- где  - вектор токов статора, измеренных в момент времени k в системе (d, q) отсчета Парка, связанной с ротором;
- вектор токов статора, измеренных в момент времени k в системе (d, q) отсчета Парка, связанной с ротором;
-  - электрический угол ротора в момент времени k;
- электрический угол ротора в момент времени k;
-  - токи статора, измеренные в момент времени k на первых двух фазах A и B.
- токи статора, измеренные в момент времени k на первых двух фазах A и B.
Токи  затем фильтруют с использованием фильтра нижних частот первого порядка, имеющего соответствующую полосу пропускания, обычным для специалиста в данной области техники способом, чтобы получить
затем фильтруют с использованием фильтра нижних частот первого порядка, имеющего соответствующую полосу пропускания, обычным для специалиста в данной области техники способом, чтобы получить  соответственно.
соответственно.
После этого вычисляют погрешность 55 автоматического управления в момент времени k, так что:

где  - погрешности автоматического управления токами статора в системе (d, q) отсчета ротора;
- погрешности автоматического управления токами статора в системе (d, q) отсчета ротора;
 - погрешность автоматического управления током ротора (обозначенная через f), которая по определению уже будет присутствовать в системе отсчета ротора;
- погрешность автоматического управления током ротора (обозначенная через f), которая по определению уже будет присутствовать в системе отсчета ротора;
 являются необходимыми токами для генерации крутящего момента электрической машины; и
являются необходимыми токами для генерации крутящего момента электрической машины; и
 - ток ротора, измеренный в момент времени k.
- ток ротора, измеренный в момент времени k.
После этого выполняют вычисление 56 двух компенсирующих напряжений  которые позволят рекурсивно компенсировать гармоники тока с инициализацией в 0:
которые позволят рекурсивно компенсировать гармоники тока с инициализацией в 0:

После этого вычисление 57 управляющих напряжений выполняют рекурсивно с инициализацией в 0.
Значения управляющих напряжений вычисляют в соответствии со следующими уравнениями:

где
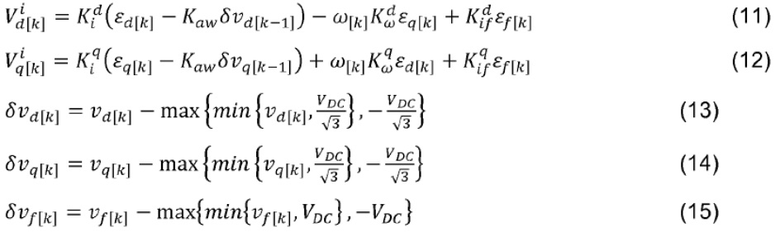
где:
 - период обновления для управления;
- период обновления для управления;
 - напряжение электрической аккумуляторной батареи;
- напряжение электрической аккумуляторной батареи;
 - электрическая угловая скорость ротора в рад/с в момент времени k; и
- электрическая угловая скорость ротора в рад/с в момент времени k; и
 - константы параметризации для системы управления, которые может определить специалист в данной области. Управляющие напряжения vd, vq, вычисленные в системе отсчета ротора, естественно передают обратно в трехфазную систему, связанную со статором, перед тем как их передают посредством заданных команд в инвертор и подают на электрическую машину.
- константы параметризации для системы управления, которые может определить специалист в данной области. Управляющие напряжения vd, vq, вычисленные в системе отсчета ротора, естественно передают обратно в трехфазную систему, связанную со статором, перед тем как их передают посредством заданных команд в инвертор и подают на электрическую машину.
В соответствии со вторым вариантом осуществления изобретения электрическая машина представляет собой синхронную электрическую машину с постоянными магнитами (PMSM). Соответственно, в этой машине нет тока ротора.
Изобретение, описанное со ссылкой на первый вариант осуществления, может быть применено к этой машине просто путем исключения вычислений, относящихся к токам ротора, а именно уравнений (5), (6), (7), (10) и (15).
Группа изобретений относится к устройству для управления синхронным двигателем. Способ управления синхронной трехфазной электрической машиной, содержащей статор и ротор, заключается в том, что измеряют токи первой и второй фаз упомянутого статора, измеряют угловое положение ротора, вычисляют упомянутые токи, измеренные в системе (d, q) отсчета ротора, вычисляют погрешность автоматического управления, рекурсивно вычисляют напряжения компенсации гармоник тока, вычисляют управляющие напряжения для электрической машины и подают управляющие напряжения на электрическую машину. Причем вычисление управляющих напряжений выполняют в упомянутой системе (d, q) отсчета ротора рекурсивно и в виде зависимости от значения периода обновления управления, значения напряжения (VDC) постоянного тока и электрической угловой скорости ротора. Также заявлены устройство управления синхронной трехфазной электрической машиной, электрическая система, содержащая синхронную электрическую машину и устройство управления, и автотранспортное средство, содержащее электрическую систему. Технический результат заключается в обеспечении устранения статической погрешности, хорошей производительности в переходном режиме и эффективной компенсации эффектов противоэлектродвижущей силы. 4 н. и 3 з.п. ф-лы, 5 ил.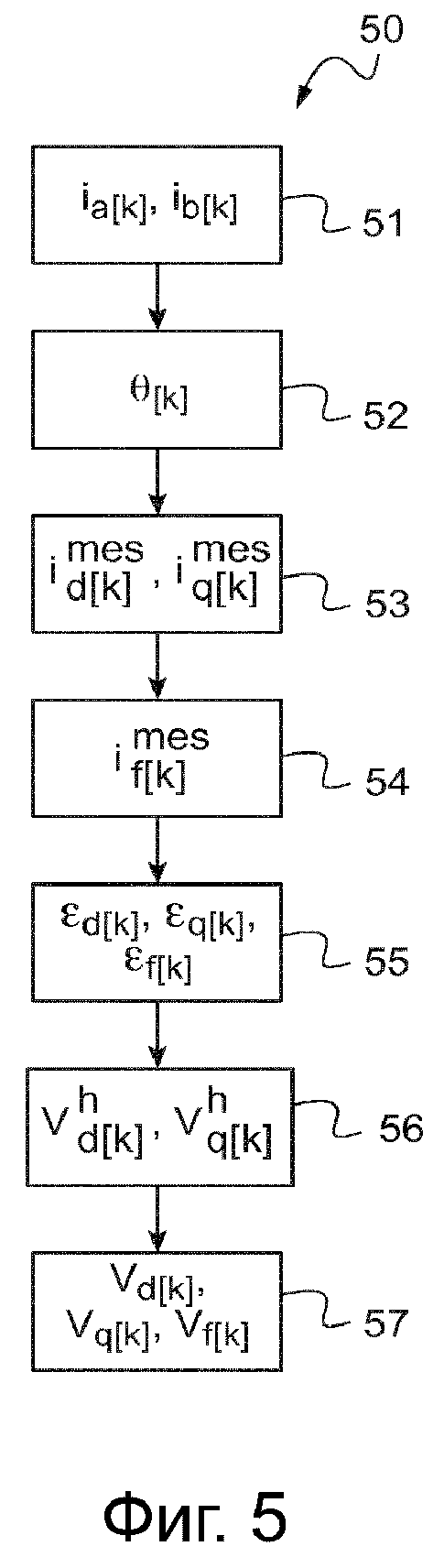
1. Способ (50) управления синхронной трехфазной электрической машиной, содержащей статор и ротор, характеризующийся тем, что измеряют (51) токи  первой и второй фаз упомянутого статора; измеряют (52) угловое положение
первой и второй фаз упомянутого статора; измеряют (52) угловое положение  ротора; вычисляют (53) упомянутые токи , измеренные в системе (d, q) отсчета ротора; вычисляют (55) погрешность
ротора; вычисляют (53) упомянутые токи , измеренные в системе (d, q) отсчета ротора; вычисляют (55) погрешность  автоматического управления; вычисляют (57) управляющие напряжения
автоматического управления; вычисляют (57) управляющие напряжения  для электрической машины и подают упомянутые управляющие напряжения на упомянутую электрическую машину; причем упомянутое вычисление (57) управляющих напряжений выполняют в упомянутой системе (d, q) отсчета ротора рекурсивно и в виде зависимости от значения периода
для электрической машины и подают упомянутые управляющие напряжения на упомянутую электрическую машину; причем упомянутое вычисление (57) управляющих напряжений выполняют в упомянутой системе (d, q) отсчета ротора рекурсивно и в виде зависимости от значения периода  обновления управления, значения напряжения (VDC) постоянного тока и электрической угловой скорости
обновления управления, значения напряжения (VDC) постоянного тока и электрической угловой скорости  ротора, при этом упомянутый способ содержит этап рекурсивного вычисления (56) напряжений компенсации гармоник тока.
ротора, при этом упомянутый способ содержит этап рекурсивного вычисления (56) напряжений компенсации гармоник тока.
2. Способ (50) по п. 1, отличающийся тем, что упомянутые измеренные токи вычисляют в системе (d, q) отсчета ротора посредством преобразования Парка.
3. Способ (50) по п. 1 или 2, отличающийся тем, что указанная электрическая машина является электрической машиной с фазным ротором, при этом способ содержит этап (54) измерения тока  ротора, а вычисление управляющих напряжений
ротора, а вычисление управляющих напряжений  включает в себя вычисление напряжения
включает в себя вычисление напряжения  которое прикладывается к фазному ротору.
которое прикладывается к фазному ротору.
4. Способ (50) по любому из пп. 1-3, отличающийся тем, что упомянутый этап вычисления (57) управляющих напряжений содержит инициализацию в 0 для целей рекурсии.
5. Устройство (4) управления синхронной трехфазной электрической машиной (2) со статором и ротором, содержащее
компонент для измерения токов первой и второй фаз упомянутого статора;
компонент для измерения углового положения ротора;
компонент для измерения тока ротора;
средство для вычисления упомянутых токов, измеренных в системе отсчета ротора;
средство для вычисления погрешности автоматического управления;
средство для вычисления управляющих напряжений для электрической машины и
средство для подачи упомянутых управляющих напряжений на упомянутую электрическую машину;
причем упомянутое средство для вычисления управляющих напряжений выполнено с возможностью выполнения упомянутого вычисления в упомянутой системе отсчета ротора рекурсивно и в виде зависимости от значения периода обновления управления, значения напряжения постоянного тока и электрической угловой скорости ротора, при этом упомянутое устройство также содержит средство для рекурсивного вычисления напряжений компенсации гармоник тока.
6. Электрическая система (1), содержащая синхронную электрическую машину (2), содержащую статор и фазный ротор или ротор с постоянными магнитами, электрическую аккумуляторную батарею (5) для питания упомянутой электрической машины (2), трехфазный инвертор (3), который способен преобразовывать напряжение (VDC) постоянного тока электрической аккумуляторной батареи (5) в трехфазные управляющие напряжения для управления синхронной электрической машиной (2), и устройство (4) управления по п. 5.
7. Автотранспортное средство, содержащее электрическую систему по п. 6.
| EP 1843462 B1, 14.01.2009 | |||
| EP 1906523 A1, 02.04.2008 | |||
| WO 2012126029 A2, 27.09.2012 | |||
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2006 |
|
RU2322752C1 |

