Настоящее изобретение относится к управлению электрическими машинами для автомобиля и, в частности, к оценке количественных величин, участвующих в таком управлении.
Сложные стратегии управления для электрических машин требуют точного знания положения и/или скорости вращения ротора. Обычно эти механические величины измеряют.
При такой управляющей структуре уровни динамических характеристик машин переменного тока лучше, чем у машин постоянного тока. С другой стороны, для такого сложного управления требуются мощные цифровые компьютеры, силовые компоненты с высокими частотами переключения и некоторые дополнительные датчики, подключенные к валу двигателя, соединенному с ротором.
Использование механических датчиков для измерения положения и/или скорости вращения ротора в управляющей структуре электрических машин создает ряд ограничений, среди которых можно указать дополнительные затраты на датчики и связанные с ними электронные компоненты, объем из-за установки датчиков и их проводки, чувствительность датчиков к окружению (температуре, шуму, механическим колебаниям, электромагнитной совместимости и т.д.) и возможность выхода из строя датчика или одного из его соединений, что снижает надежность системы.
Эти ограничения ограничивают применение датчиков, даже делают невозможным их использование в некоторых приложениях. Поэтому, необходимо заменить механические датчики, которые измеряют положение и угловую скорость ротора, алгоритмами оценки, которые оценивают эти величины с использованием измерений токов и напряжений.
Из уровня техники известны следующие документы.
В документе US 2013/0289934A1 описан способ оценивания магнитного потока статора по сигналам напряжения и токов машины, который затем используют для оценки магнитного потока ротора машины по магнитному потоку статора. Способ также содержит определение фазы и ее производной. Этот способ применим только к синхронной машине и не может быть перенесен на машины с фазным ротором.
В документе US 2007/0194742A1 описано оценивание магнитного потока без привлечения наблюдателя в собственном смысле этого слова, а с помощью смещенных синусоидальных сигналов.
В документе CN102983806 описана простая технология оценивания магнитного потока статора.
В документе CN102437813 описан способ возврата к углу и скорости вращения ротора от магнитного потока ротора для синхронной машины с постоянными магнитами. Кроме того, идеи, изложенные в документе, включают в себя широкое использование физической фильтрации путем извлечения основной частоты напряжения и тока ротора.
В документе EP3012962 описан способ оценивания положения синхронной машины с фазным ротором на основе оценки магнитного потока. В этом способе необходимо знать индуктивность фаз и взаимные индуктивности между статором и ротором.
Существует потребность в способе управления электрической машиной, который является улучшением по сравнению с существующими способами, который может быть применен к любому типу машин переменного тока (синхронным и асинхронным) и который может обеспечить большую устойчивость по отношению к параметрам машины и по отношению к шумам измерения.
Предметом изобретения является способ оценки положения и скорости вращения ротора машины переменного тока для автомобиля. Способ включает в себя следующие этапы:
определяют токи статора машины в трехфазной системе отсчета и значения напряжений статора машины в трехфазной системе отсчета,
определяют компоненты токов статора в двухфазной системе отсчета как функцию токов статора в трехфазной системе отсчета с использованием преобразования Конкордии,
определяют компоненты напряжений статора в двухфазной системе отсчета как функцию напряжений статора в трехфазной системе отсчета с использованием преобразования Конкордии,
итеративно определяют скорость ротора как функцию напряжений статора в двухфазной системе отсчета и установочных параметров,
определяют магнитные потоки статора машины в двухфазной системе отсчета как функцию скорости ротора и параметров отбрасывания, и
определяют положение ротора как функцию магнитных потоков статора в двухфазной системе отсчета, токов статора в двухфазной системе отсчета и эквивалентной индуктивности.
Параметры отбрасывания могут быть определены как функция сопротивления обмотки статора, токов статора в двухфазной системе отсчета, напряжений статора в двухфазной системе отсчета и установочных параметров.
Если электрическая машина является машиной синхронного типа, то можно задать эквивалентную индуктивность, равную квадратичной компоненте индуктивности статора.
Если электрическая машина является машиной асинхронного типа, то можно задать эквивалентную индуктивность как функцию взаимной индуктивности, индуктивности статора и индуктивности ротора.
Электромагнитный момент можно определить как функцию магнитных потоков статора в двухфазной системе отсчета и токов статора в двухфазной системе отсчета.
Предметом изобретения также является система оценки положения и скорости вращения ротора машины переменного тока для автомобиля. Система содержит:
первое средство для определения компонент токов статора в двухфазной системе отсчета как функции токов статора в трехфазной системе отсчета с использованием преобразования Конкордии,
второе средство для определения компонент напряжений статора в двухфазной системе отсчета как функции напряжений статора в трехфазной системе отсчета с использованием преобразования Конкордии,
третье средство для итеративного определения скорости ротора как функции напряжений статора в двухфазной системе отсчета,
средство для оценки магнитных потоков статора в двухфазной системе отсчета в зависимости от скорости вращения ротора и для оценки параметров шума измерения и отбрасывания отклонений, полученных от четвертого средства для определения указанных параметров, и
пятое средство для определения положения ротора как функции магнитных потоков статора в двухфазной системе отсчета, токов статора в двухфазной системе отсчета и эквивалентной индуктивности.
Четвертое средство способно определять параметры шума измерения и отбрасывания отклонений как функцию токов статора в двухфазной системе отсчета, напряжений статора в двухфазной системе отсчета и скорости вращения ротора.
Если электрическая машина является машиной синхронного типа, то эквивалентную индуктивность можно задать равной квадратичной компоненте индуктивности статора.
Если электрическая машина является машиной асинхронного типа, то эквивалентную индуктивность можно определить как функцию взаимной индуктивности, индуктивности статора и индуктивности ротора.
Система оценки может содержать шестое средство для определения электромагнитного момента как функции магнитных потоков статора в двухфазной системе отсчета и токов статора в двухфазной системе отсчета.
Другие цели, признаки и преимущества изобретения станут очевидными из последующего описания, приведенного полностью в виде неограничивающего примера и со ссылкой на прилагаемые чертежи, на которых представлено следующее:
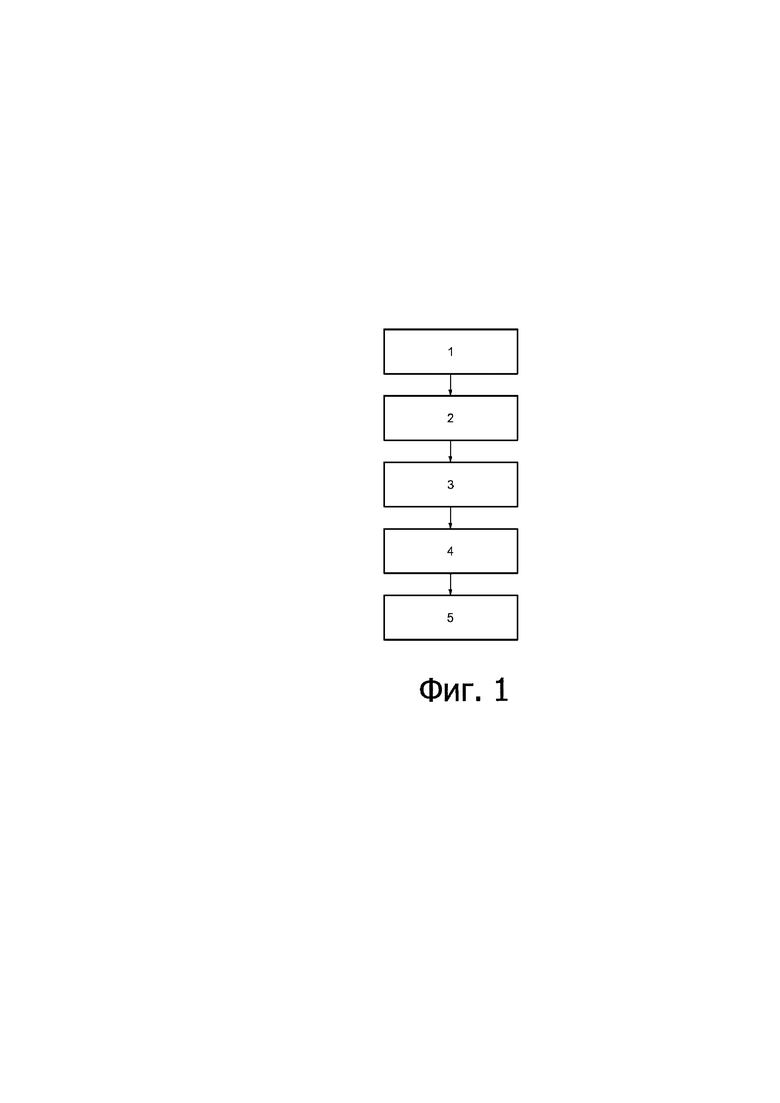
на фиг. 1 показаны основные этапы способа оценки в соответствии с изобретением, а
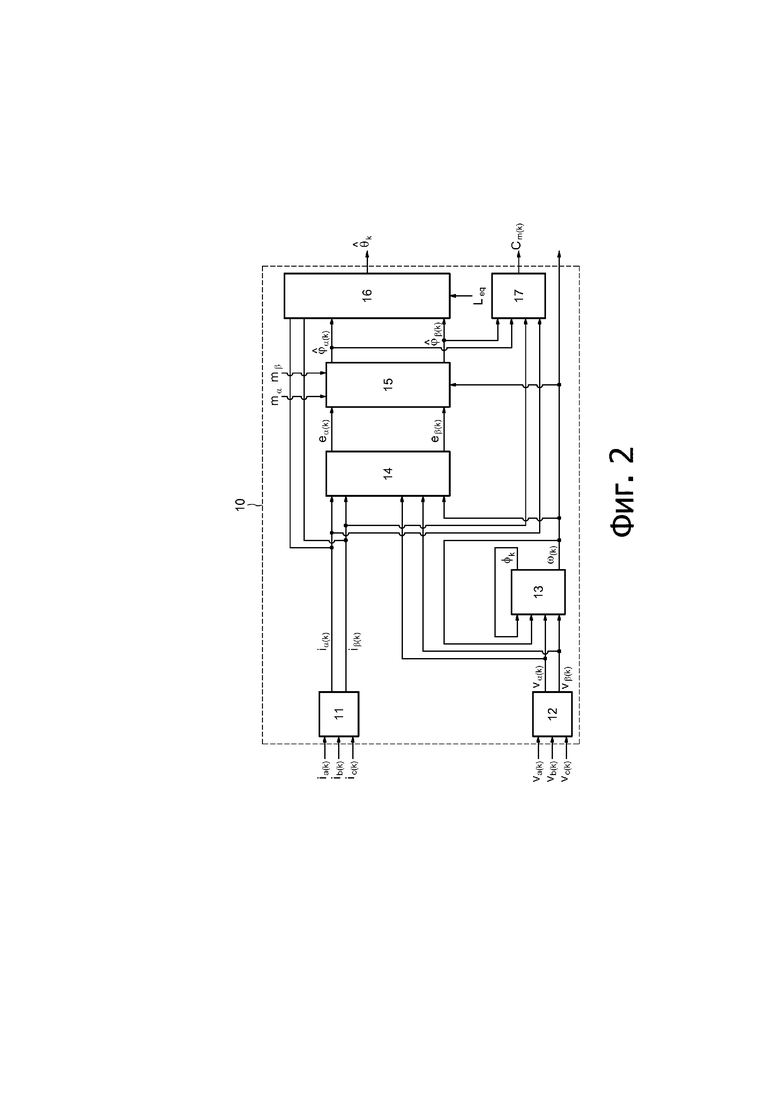
на фиг. 2 показаны основные элементы системы оценки в соответствии с изобретением.
Далее будут описаны математические и физические принципы, которые позволяют определять положение и скорость вращения ротора электрической машины.
Измеряют токи ia, ib и ic статора. Напряжения va, vb и vc известны на уровне управления.
Из трехфазных напряжений va, vb, vc двухфазные напряжения vα, vβ вычисляют с применением следующего уравнения.
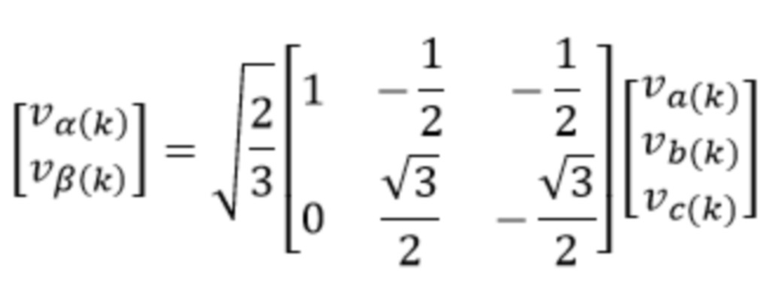 (1)
(1)
В случае многофазной машины проекция на двухфазную систему отсчета является частью уровня техники, известного специалисту в данной области.
Из трехфазных токов ia, ib, ic двухфазные токи 

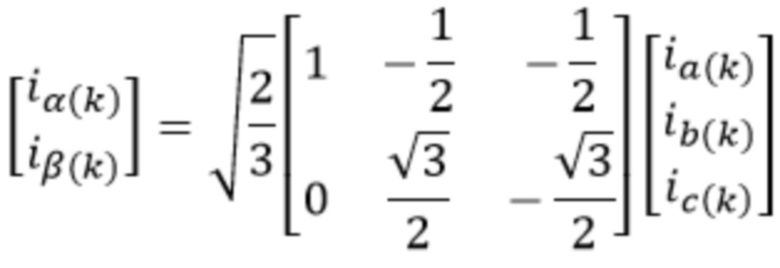 (2)
(2)
Следует отметить, что эти преобразования обычно известны как преобразования Конкордии трехфазной системы отсчета, присущей статору, в двухфазную систему отсчета, также присущую статору.
Скорость 
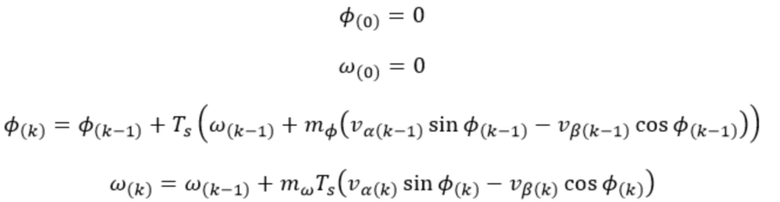 (3)
(3)
при этом:


Ts – шаг отсчета, а
Φ(0) – переменная, позволяющая оценивать скорость (проинициализированная в нуле).
Уравнение (3) обеспечивает оценку скорости, которая может быть задана с помощью параметров
Две величины 

 (4)
(4)
где:
 (5)
(5)
Rs – сопротивление обмотки статора.
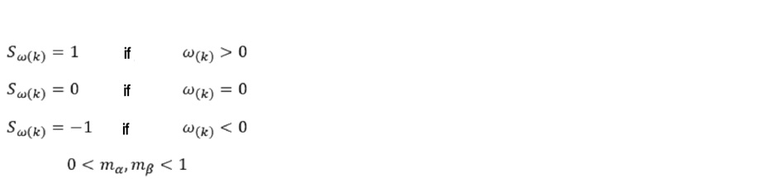
В общем, для двух величин eα(k) и eβ(k) выбирают следующие значения:


Магнитные потоки 
 (7)
(7)
При использовании уравнения (7) есть уверенность, что оценка магнитных потоков будет устойчивой по отношению к шумам и отклонениям, вносимым датчиками. Параметры
Значения, лежащие от 0,2 до 0,7, обеспечивают хорошее качество оценки.
Более того, уравнение (7) является более устойчивым, чем оценка, предложенная в существующем уровне техники.
Положение 
 (8)
(8)
Для синхронных машин эквивалентную индуктивность Leq заменяют на квадратичный компонент индуктивности (Lq) статора.
Leq = Lq (9)
Для асинхронных машин эквивалентную индуктивность Leq заменяют на переходную индуктивность статора:
 (10)
(10)
где:
Ls – индуктивность статора,
Lr – индуктивность ротора, и
М – взаимная индуктивность между статором и ротором в асинхронной машине.
Электромагнитный момент Cm(k) можно оценить по оценкам магнитных потоков и токов с применением следующего уравнения:
 (11)
(11)
Далее следует описание основных этапов способа оценки положения и скорости ротора машины переменного тока по известным токам (ia, ib, ic) статора, напряжениям (va, vb, vc) статора, сопротивления обмотки статора и эквивалентной индуктивности Leq. Эти этапы показаны на фиг. 1.
На первом этапе определяют токи статора и напряжения статора в трехфазной системе отсчета. Следует отметить, что напряжения статора можно получить непосредственно от средства управления электрической машиной.
На втором этапе 2 определяют компоненты токов статора в двухфазной системе отсчета как функцию токов статора в трехфазной системе отсчета с применением уравнения 1, а также определяют компоненты напряжений статора в двухфазной системе отсчета как функцию напряжений статора в трехфазной системе отсчета с применением уравнения 2.
На третьем этапе 3 определяют скорость ротора как функцию напряжений статора в двухфазной системе отсчета с применением уравнения 3.
На четвертом этапе 4 определяют магнитные потоки статора в двухфазной системе отсчета как функцию скорости ротора, сопротивления обмотки статора и токов и напряжений статора в двухфазной системе отсчета с применением уравнения 7 в сочетании с уравнениями 4-6. Эта оценка позволяет отбросить измерение шумов и отклонений на датчиках тока с помощью параметров, заданных уравнением 4. Эта оценка не зависит от типа применяемой машины.
На пятом этапе 5 определяют положение ротора как функцию магнитных потоков статора в двухфазной системе отсчета, токов статора в двухфазной системе отсчета и эквивалентной индуктивности с применением уравнения 8.
Если электрическая машина является машиной синхронного типа, то эквивалентную индуктивность задают равной квадратичной компоненте индуктивности статора.
Если электрическая машина является машиной асинхронного типа, то эквивалентную индуктивность определяют как функцию взаимной индуктивности, индуктивности статора и индуктивности ротора с применением уравнения 10.
Наконец, электромагнитный момент определяют как функцию магнитных потоков статора в двухфазной системе отсчета и токов статора в двухфазной системе отсчета с применением уравнения 11.
Далее следует описание основных элементов системы оценки положения и скорости ротора машины переменного тока по известным токам (ia, ib, ic) статора, напряжениям (va, vb, vc) статора, сопротивления обмотки статора и эквивалентной индуктивности Leq. Эти элементы показаны на фиг. 2.
Первое средство 11 определения определяет компоненты токов статора в двухфазной системе отсчета как функцию токов статора в трехфазной системе отсчета с применением уравнения 1.
Первое средство 12 определения определяет компоненты напряжений статора в двухфазной системе отсчета как функцию напряжений статора в трехфазной системе отсчета с применением уравнения 2.
Третье средство 13 определения итеративно определяет скорость ротора как функцию напряжений статора в двухфазной системе отсчета с применением уравнения 3.
Средство 15 оценки оценивает магнитные потоки статора в двухфазной системе отсчета как функцию скорости ротора, сопротивления обмотки статора и токов и напряжений статора в двухфазной системе отсчета с применением уравнения 7 в сочетании с уравнениями 4-6. Более конкретно, четвертое средство 14 определения определяет параметры шума измерений и отбрасывания отклонений как функцию токов статора в двухфазной системе отсчета, напряжений статора в двухфазной системе отсчета, сопротивления обмотки статора и скорости вращения ротора с применением уравнений 4-6, а средство 15 оценивания оценивает магнитные потоки статора как функцию параметров отбрасывания, определяемых четвертым средством определения, и как функцию скорости ротора, полученную третьим средством.
Пятое средство 16 определения определяет положение ротора как функцию магнитных потоков статора в двухфазной системе отсчета, токов статора в двухфазной системе отсчета и эквивалентной индуктивности с применением уравнения 8.
Если электрическая машина является машиной синхронного типа, то эквивалентную индуктивность задают равной квадратичной компоненте индуктивности статора.
Если электрическая машина является машиной асинхронного типа, то средство определения, не показанное на фиг. 2, определяет эквивалентную индуктивность как функцию взаимной индуктивности, индуктивности статора и индуктивности ротора с применением уравнения 10.
Наконец, шестое средство 17 определения также определяет электромагнитный момент как функцию магнитных потоков статора в двухфазной системе отсчета токов статора в двухфазной системе отсчета с применением уравнения 11.
Способ оценивания положения и скорости ротора машины переменного тока для автомобиля. Способ включает в себя следующие этапы: определяют токи статора машины в трехфазной системе отсчета и значения напряжений статора машины в трехфазной системе отсчета, определяют компоненты токов статора в двухфазной системе отсчета в зависимости от токов статора в трехфазной системе отсчета с использованием преобразования Конкордии, определяют компоненты напряжений статора в двухфазной системе отсчета в зависимости от напряжений статора в трехфазной системе отсчета с использованием преобразования Конкордии, итеративно определяют скорость ротора в зависимости от напряжений статора в двухфазной системе отсчета и регулировочных параметров, определяют магнитные потоки статора машины в двухфазной системе отсчета в зависимости от скорости ротора и параметров отбрасывания и определяют положение ротора в зависимости от магнитных потоков статора в двухфазной системе отсчета, токов статора в двухфазной системе отсчета и эквивалентной индуктивности. 2 н. и 8 з.п. ф-лы, 2 ил.
1. Способ оценивания положения и скорости ротора машины переменного тока для автомобиля, отличающийся тем, что выполняют следующие этапы:
измеряют токи статора машины в трехфазной системе отсчета и значения напряжений статора машины в трехфазной системе отсчета,
определяют компоненты токов статора в двухфазной системе отсчета как функцию токов статора в трехфазной системе отсчета с использованием преобразования Конкордии,
определяют компоненты напряжений статора в двухфазной системе отсчета как функцию напряжений статора в трехфазной системе отсчета с использованием преобразования Конкордии,
итеративно определяют скорость ротора как функцию напряжений статора в двухфазной системе отсчета и установочных параметров,
определяют магнитные потоки статора машины в двухфазной системе отсчета как функцию скорости ротора и параметров отказа и
определяют положение ротора как функцию магнитных потоков статора в двухфазной системе отсчета, токов статора в двухфазной системе отсчета и эквивалентной индуктивности.
2. Способ по п.1, отличающийся тем, что параметры отбрасывания определяют как функцию сопротивления обмотки статора, токов статора в двухфазной системе отсчета, напряжений статора в двухфазной системе отсчета и установочных параметров.
3. Способ по п. 1 или 2, отличающийся тем, что если электрическая машина является машиной синхронного типа, то эквивалентную индуктивность задают равной квадратичной компоненте индуктивности статора.
4. Способ по п. 1 или 2, отличающийся тем, что если электрическая машина является машиной асинхронного типа, то эквивалентную индуктивность определяют как функцию взаимной индуктивности, индуктивности статора и индуктивности ротора.
5. Способ по любому из пп. 1-4, отличающийся тем, что электромагнитный момент определяют как функцию магнитных потоков статора в двухфазной системе отсчета и токов статора в двухфазной системе отсчета.
6. Система оценивания положения и скорости ротора машины переменного тока для автомобиля, отличающаяся тем, что она содержит:
первое средство для определения компонент токов статора в двухфазной системе отсчета как функцию токов статора в трехфазной системе отсчета с использованием преобразования Конкордии,
второе средство (12) для определения компонент напряжений статора в двухфазной системе отсчета как функцию напряжений статора в трехфазной системе отсчета с использованием преобразования Конкордии,
третье средство (13) для итеративного определения скорости ротора как функции напряжений статора в двухфазной системе отсчета,
средство (15) для оценки магнитных потоков статора в двухфазной системе отсчета в зависимости от скорости вращения ротора и для оценки параметров шума измерения и отбрасывания отклонений, полученных от четвертого средства для определения указанных параметров,
пятое средство (16) для определения положения ротора как функции магнитных потоков статора в двухфазной системе отсчета, токов статора в двухфазной системе отсчета и эквивалентной индуктивности.
7. Система по п. 6, отличающаяся тем, что четвертое средство (14) определения предназначено для определения параметров шума измерения и отбрасывания отклонений как функции токов статора в двухфазной системе отсчета, напряжений статора в двухфазной системе отсчета и скорости вращения ротора.
8. Система по п. 6 или 7, отличающаяся тем, что если электрическая машина является машиной синхронного типа, то эквивалентную индуктивность задают равной квадратичной компоненте индуктивности статора.
9. Система по п. 6 или 7, отличающаяся тем, что если электрическая машина является машиной асинхронного типа, то средство определения определяет эквивалентную индуктивность как функцию взаимной индуктивности, индуктивности статора и индуктивности ротора.
10. Система по любому из пп. 6-9, отличающаяся тем, что содержит шестое средство (17) для определения электромагнитного момента как функции магнитных потоков статора в двухфазной системе отсчета и токов статора в двухфазной системе отсчета.
| EP 3012962 A1, 27.04.2016 | |||
| CN 102983806 A, 20.03.2013 | |||
| US 2013289934 A1, 31.10.2013 | |||
| CN 102437813 A, 02.05.2012 | |||
| US 2007194742 A1, 23.08.2007 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКОЙ ВРАЩАЮЩЕЙСЯ МАШИНОЙ | 2009 |
|
RU2481694C1 |

