Изобретение относится к робототехнике, а именно к робототехническим комплексам, предназначенным для дистанционной эвакуации раненых с поля боя.
Эвакуация раненых в ходе боя - это серьезнейшее и опасное мероприятие. Раненых нужно спасать, выносить, оказывать первую помощь, а тяжелораненых стабилизировать и вывозить в тыл для полноценной и профессиональной медицинской помощи. Все эти мероприятия отвлекают значительные силы, до трех человек личного состава на каждого раненого. Мало того, что эти силы какое-то время не принимают участие в наступлении или обороне, которые ведет подразделение, так они еще и вынужденно формируют привлекательную для противника, легкую мишень. Поэтому эвакуация раненых с поля боя - это тяжелейшее испытание.
Таким образом, разработка технических решений, позволяющих сделать проблему эвакуации раненых в ходе боя менее опасным для личного состава, является важной научной задачей.
Известно спасательное покрывало по патенту №2696758 (опубл. 05.08.2019), выполненное в форме вытянутого прямоугольника из материала, защищающего от воздействия внешней среды, кроме того, по углам прямоугольника сформированы четыре элемента захвата, при этом покрывало выполнено из тканого материала с противопожарной пропиткой и укреплено стропой, настроченной по диагоналям покрывала, углы покрывала отогнуты в сторону внутренней поверхности и пристрочены к материалу покрывала таким образом, что углы у основания полученного треугольника составляют 45°, при этом в отогнутых углах покрывала выполнены элементы захвата в виде прорезей со вставками из упрочняющего материала для размещения руки человека, кроме того, в полученных треугольниках нижней части покрывала в углах при основании, образованных отогнутой длинной стороной покрывала, выполнены сквозные отверстия, окаймленные упрочняющим материалом, кроме того, на внутреннюю поверхность верхней короткой стороны покрывала вдоль кромки пристрочена укрепляющая стропа, на которой на средней линии покрывала, параллельной длинной стороне, закреплен фиксатор тела пострадавшего, выполненный с возможностью изменения длины в виде петли из стропы, при этом для укрепления материала покрывала, для короткой верхней стороны покрывала и для петли используют стропу шириной от 2 до 4 см, которая выдерживает статическую нагрузку не менее 300 кг на 5 минут, кроме того, в пристроченной к верхней короткой стороне покрывала укрепляющей стропе, симметрично относительно средней линии покрывала, параллельной длинной стороне, и на расстоянии от нее от 15 до 20 см, выполнены сквозные отверстия, окаймленные упрочняющим материалом, в которых закреплены карабины для присоединения спасательного покрывала к поясному ремню пожарного, выдерживающие статическую нагрузку не менее 300 кг на 5 минут, с диаметром сечения не более 10 мм, при этом в походном состоянии спасательное покрывало сложено вдоль длинной стороны кромками длинных сторон навстречу друг другу и свернуто в форме валика в направлении к карабинам, при этом края валика зафиксированы от развертывания, причем после сложения покрывала вдоль длинной стороны кромками длинных сторон навстречу друг другу сквозные отверстия с карабинами находятся на соответствующих линиях сгиба покрывала.
Недостатком известного спасательного покрывала является то, что в качестве тяговой силы при транспортировке эвакуируемого применяются усилия людей, что в условиях боевых действий зачастую затруднено либо невозможно. При этом приведение известного технического решения в рабочее положение требует временных затрат, что увеличивает время нахождения в опасных условиях.
Известен сворачивающийся эвакуационный матрас по патенту US 2013276235 от 19.04.2013, содержащий нижний лист, имеющий головную часть и ножную часть. Поддерживающий лист для пациента расположен над матрасом и имеет левое крыло и правое крыло, размеры которых соответственно позволяют охватывать слева и справа пациента, лежащего на поддерживающем листе. Секция для ног соединена с нижним листом и имеет такие размеры, чтобы охватывать матрас для эвакуации пациента, когда нижний лист, матрас и поддерживающий лист скатываются от головного конца к нижнему концу в направлении, параллельном продольной оси матраса в указанную ножную секцию.
Недостатком известного сворачивающегося матраса является то, что приведение матраса в сложенное состояние осуществляется ручным способом, что тоже приводит к временным затратам.
Наиболее близким аналогом к заявленному предложению является наземный робототехнический комплекс БРГ-1, известный из открытых источников (https://www.youtube.com/watch?v=m0O-WwZz0m4&t=6s), платформы на гусеничном ходу, оснащенный системами навигации и управления и имеющий в торцевой части платформы устройство буксирования, к которому присоединено эвакуационное полотно.
Недостатком известного робототехнического комплекса БРГ-1, при использовании его в качестве эвакуирующей машины, является его низкая эффективность, обусловленная значительными временными затратами на приведение эвакуационного полотна в развернутое состояние перед эвакуацией и свернутое - после окончания эвакуации раненого, при этом конструкция известного робототехнического комплекса БРГ-1 не защищена от саморазматывания эвакуационного полотна при движении, что может привести к непредвиденному зацеплению за окружающие объекты.
Общим недостатком для вышеуказанных технических решений является то, что в них не предусмотрено пассивных средств, препятствующих соскальзыванию раненных при осуществлении эвакуации.
Техническим результатом изобретения является повышение эффективности эвакуации раненых за счет исключения саморазматывания эвакуационного полотна при движении эвакуационного робототехнического комплекса в походном положении и уменьшения времени приведения эвакуационного полотна в развернутое состояние перед эвакуацией и свернутое - после окончания эвакуации раненого и облегчение фиксации эвакуируемого пассивными средствами удержания.
Технический результат достигается за счет того, что в кормовой части робототехнического комплекса размещены два кронштейна, между которыми посредством болтового соединения установлен подпружиненный вал, при этом вал установлен с возможностью вращения вокруг своей оси, а один конец эвакуационного полотна вставлен и зафиксирован прижимной планкой в паз подпружиненного вала, дополнительно внутренняя поверхность эвакуационного полотна, обращенная к эвакуируемому, снабжена антискользящими полимерными вставками.
Сущность предлагаемого изобретения поясняется рисунками, на которых изображены:
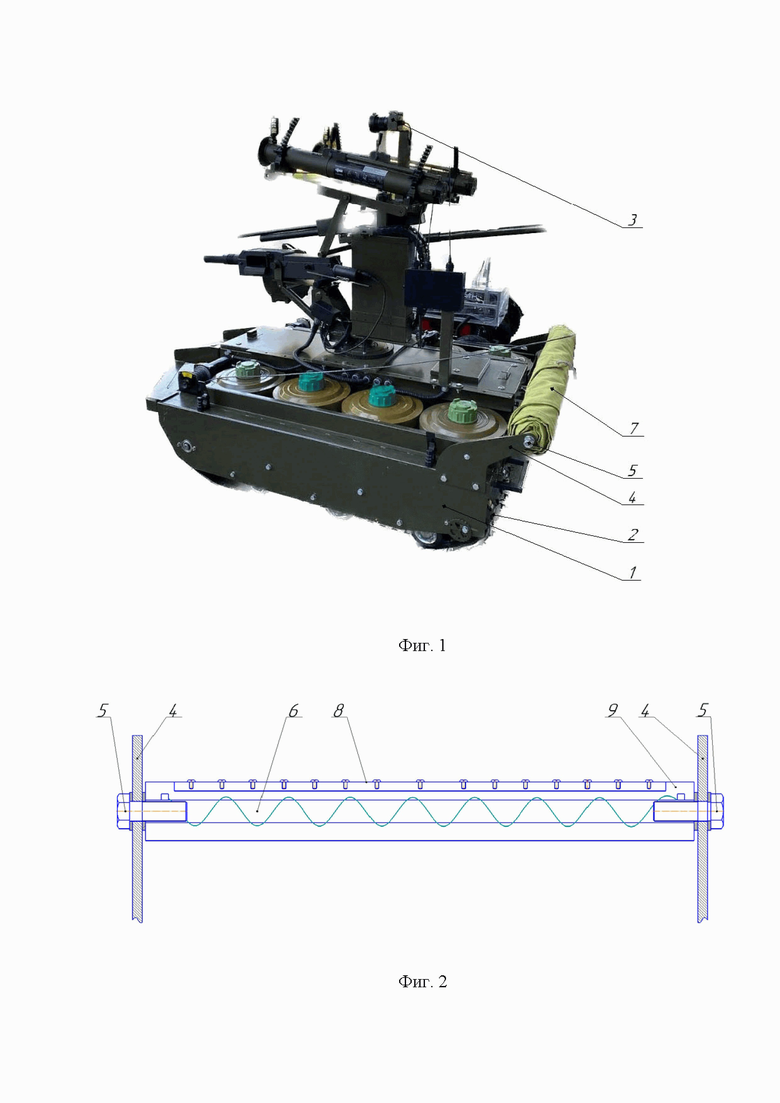
фиг. 1 - эвакуационный робототехнический комплекс (ЭРК) в транспортировочном положении;
фиг. 2 - устройство размещения эвакуационного полотна.
ЭРК содержит самоходную платформу 1 (см. фиг 1) с гусеничным движителем 2, видеокамеру 3, источник питания и пульт дистанционного управления (на фигуре не показаны), в кормовой части робототехнического комплекса размещены два кронштейна 4, между которыми посредством болтового соединения 5 установлен подпружиненный вал 6 (см. фиг. 2), при этом вал установлен с возможностью вращения вокруг своей оси, а один конец эвакуационного полотна 7 вставлен и зафиксирован прижимной планкой 8 в паз кожуха 9 подпружиненного вала 6. Заявленный ЭРК работает следующим образом.
Для осуществления эвакуации раненых ЭРК, управляемый оператором посредством дистанционного пульта, направляют в зону эвакуации. Эвакуационное полотно 7 находится в свернутом состоянии, так как на подпружиненный вал 6 действуют упругие силы, обеспечивающие его вращение вокруг собственной оси. При достижении места положения раненого ЭРК останавливают кормовой частью к эвакуируемому. Раненый самостоятельно, одним движением, потянув за край эвакуационного полотна 7, разматывает его на величину, необходимую для размещения на нем. После погрузки раненный, удерживая края эвакуационного полотна 7, транспортируется в безопасную зону волоком. После окончания эвакуации и снятия усилия с эвакуационного полотна 7 полотно незамедлительно наматывается на подпружиненный вал 6, что обеспечивает быстрое приведение ЭРК в походное положение для выполнения новой задачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДИСТАНЦИОННОЙ ЭВАКУАЦИИ НА БАЗЕ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2024 |
|
RU2838648C1 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| СПОСОБ ПОСТАНОВКИ МИННЫХ ЗАГРАЖДЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2833085C1 |
| Способ и устройство для постановки минных заграждений | 2023 |
|
RU2834487C1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС С НОЖНИЧНЫМ ПОДЪЕМНИКОМ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2830637C1 |
| Мобильный роботехнический комплекс | 2024 |
|
RU2828909C1 |
| Боевой модуль робототехнического комплекса военного назначения с устройством прерывания очереди при стрельбе из автоматического оружия | 2023 |
|
RU2831825C1 |
| Боевой модуль робототехнического комплекса с универсальным ложементом | 2024 |
|
RU2838709C1 |
| Спасательное покрывало | 2019 |
|
RU2696758C1 |
| СПОСОБ РЕШЕНИЯ ОГНЕВОЙ ЗАДАЧИ ДИСТАНЦИОННО УПРАВЛЯЕМЫМ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ ВОЕННОГО НАЗНАЧЕНИЯ В АВТОНОМНОМ РЕЖИМЕ | 2024 |
|
RU2840168C1 |
Техническое решение относится к робототехническим комплексам, предназначенным для дистанционной эвакуации раненых с поля боя. В кормовой части робототехнического комплекса размещены два кронштейна. Между кронштейнами посредством болтового соединения установлен подпружиненный вал. Вал установлен с возможностью вращения вокруг своей оси. Один конец эвакуационного полотна вставлен и зафиксирован прижимной планкой в паз подпружиненного вала. Дополнительно внутренняя поверхность эвакуационного полотна, обращенная к эвакуируемому, снабжена антискользящими полимерными вставками. Достигается повышение эффективности эвакуации раненых за счет исключения саморазматывания эвакуационного полотна при движении эвакуационного робототехнического комплекса в походном положении и уменьшения времени приведения эвакуационного полотна в развернутое состояние перед эвакуацией и свернутое - после окончания эвакуации раненого, и облегчение фиксации эвакуируемого пассивными средствами удержания. 2 ил.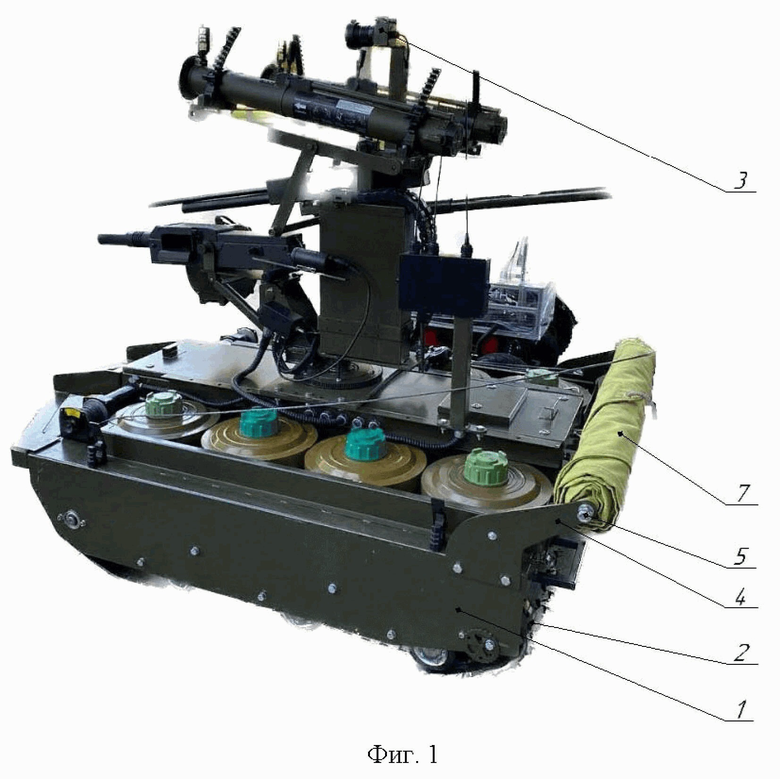
Эвакуационный робототехнический комплекс, содержащий самоходную платформу с гусеничным движителем, видеокамеру, источник питания и пульт дистанционного управления, отличающийся тем, что в кормовой части робототехнического комплекса размещены два кронштейна, между которыми посредством болтового соединения установлен подпружиненный вал, при этом вал установлен с возможностью вращения вокруг своей оси, а один конец эвакуационного полотна вставлен и зафиксирован прижимной планкой в паз кожуха подпружиненного вала, дополнительно внутренняя поверхность эвакуационного полотна, обращенная к эвакуируемому, снабжена антискользящими полимерными вставками.
| CN 215240873 U, 21.12.2021 | |||
| CN 111297575, 19.06.2020 | |||
| МАНИПУЛЯТОРНОЕ УСТРОЙСТВО РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2817120C1 |
| RU 2014137078 A, 10.04.2016 | |||
| Биоптическая камера | 1961 |
|
SU148716A1 |

