Изобретение касается способа распознавания и отслеживания положения передвижного перегрузочного устройства/погрузочного устройства колесно-лопастного экскаватора или многоковшового цепного экскаватора, который состоит из добычного агрегата с поворотной верхней частью, снабженной наклоняемой стрелой, из нижней части на гусеничном ходу и перегрузочного устройства, снабженного погрузочной стрелой, и загружает добываемый материал посредством уступной конвейерной установки, снабженной/не снабженной промежуточной конвейерной тележкой, или аналогичного перегрузочного пункта.
Колесно-лопастной экскаватор при обычных конструкциях состоит из поворотной верхней части, снабженной наклоняемой стрелой с закрепленным на ней лопастным колесом, из нижней части на гусеничном ходу и перегрузочного устройства или, соответственно, погрузочного устройства, снабженного погрузочной стрелой, включая погрузочную ленту. Верхняя часть при работе совершает вращательное движение туда и обратно в своем рабочем диапазоне на нижней части на гусеничном ходу. Колесно-лопастной экскаватор передает добытые им при блочной разработке (блочная разработка уступов или боковая блочная разработка) массы или, соответственно, добываемый материал, например уголь или вскрышную породу, на передвижную уступную конвейерную установку.
Многоковшовые цепные экскаваторы на гусеницах оснащены поворотным механизмом для верхней части. Они могут работать с верхним и нижним черпанием. В верхней части экскаватора перпендикулярно направлению движения помещаются ковшовые рамы, нижняя подвижная часть которых подвешена шарнирно на верхней части и на стреле посредством одной или нескольких лебедок ковшовых рам. По ковшовой раме движется бесконечная ковшовая цепь. Многоковшовый цепной экскаватор оснащен перегрузочным устройством.
Конструкция перегрузочного устройства учитывает, что угол между погрузочным конвейером перегрузочного устройства и осью уступной ленты может регулироваться в горизонтальной проекции. Посредством поворотного движения перегрузочного устройства вылет перегрузочного устройства может подбираться к расстоянию от передвижной уступной конвейерной установки до оси экскаватора (центральной оси нижней части на гусеничном ходу). Передвижная уступная конвейерная установка располагается параллельно направлению движения перемещаемой на гусеницах нижней части экскаватора (многоковшовый цепной экскаватор или колесно-лопастной экскаватор) и передвигается в зависимости от продвигания выемки.
Промежуточная конвейерная тележка может использоваться, в частности, для увеличения радиуса действия колесно-лопастного экскаватора или многоковшового цепного экскаватора при выемке.
Одна из существенных задач при погрузке заключается в управлении поворотным механизмом/подъемным механизмом погрузочной стрелы, включая погрузочную ленту перегрузочного устройства, включительно управление погрузочного желоба для надлежащей загрузки ленты уступной конвейерной установки или конвейерной тележки, и контроль массового потока или, соответственно, потока добываемого материала. Эта задача выполняется оператором по погрузке.
Оператор по погрузке осуществляет управление поворотным механизмом/подъемным механизмом погрузочной стрелы и управление погрузочным желобом для надлежащей загрузки ленты и контроля массового потока.
В основе изобретения лежит задача, предложить оптимизированный способ распознавания и отслеживания положения передвижного перегрузочного устройства/погрузочного устройства колесно-лопастного экскаватора или многоковшового цепного экскаватора.
Эта задача в связи с ограничительной частью п.1 формулы изобретения решается в соответствии с изобретением за счет того, что устройство регулирования/управления задает угол поворота и наклон погрузочной стрелы перегрузочного устройства в зависимости от сигналов следующих измерительных датчиков:
- измерительного датчика для регистрации текущих пространственных координат колесно-лопастного экскаватора или многоковшового цепного экскаватора,
- измерительного датчика для регистрации текущих пространственных координат уступной конвейерной установки или приемной ленты конвейерной тележки,
- измерительного датчика для регистрации текущего продольного наклона и поперечного наклона погрузочной стрелы,
- измерительного датчика для регистрации текущего угла поворота погрузочной стрелы,
- измерительного датчика для регистрации текущего расстояния погрузочной стрелы над уступной конвейерной установкой или над приемной лентой конвейерной тележки,
- измерительного датчика для регистрации текущего вертикального позиционирования погрузочной стрелы над уступной конвейерной установкой или над приемной лентой конвейерной тележки, включая регистрацию середины ленты,
- измерительного датчика для контроля пересыпания через край в/на месте перегрузки погрузочной стрелы.
Достигаемые с помощью изобретения преимущества заключаются, в частности, в том, что дополнительный оператор по погрузке больше не нужен, потому что управление поворотным механизмом/подъемным механизмом погрузочной стрелы, включая погрузочную ленту перегрузочного устройства, включая управление погрузочным желобом для надлежащей загрузки ленты уступной конвейерной установки или приемной ленты конвейерной тележки и контроль массового потока или, соответственно, потока добываемого материала, теперь выполняется предложенным устройством регулирования/управления. Другими словами, ручное позиционирование заменяется автоматическим позиционированием (работа без оператора) погрузочной стрелы для перегрузки добываемого материала на транспортирующую конвейерную установку - уступную конвейерную установку или конвейерную тележку с приемной лентой.
Устройство регулирования/управления оказывает непосредственное влияние на движение уступной ленты или приемной ленты конвейерной тележки с учетом загрязнения конвейерной установки. Добываемый материал грузится с учетом переходов ленты. При опасности заторов массы в/на месте перегрузки (перегрузочном желобе) колесно-лопастному экскаватору или многоковшовому цепному экскаватору подается сигнал, приостановить добычу.
Характерными случаями применения изобретения являются:
- колесно-лопастной экскаватор, снабженный погрузочной стрелой для перегрузки на уступную конвейерную установку,
- многоковшовый цепной экскаватор, снабженный погрузочной стрелой для перегрузки на уступную конвейерную установку,
- колесно-лопастной экскаватор, снабженный погрузочной стрелой для перегрузки на промежуточную конвейерную тележку,
- колесно-лопастной экскаватор, снабженный погрузочным устройством для перегрузки на уступную конвейерную установку.
Целесообразные варианты осуществления изобретения приведены в зависимых пунктах формулы изобретения.
Ниже изобретение поясняется на примере осуществления, изображенном на чертеже. Показано:
фиг.1: схематичный вид добычных работ с помощью колесно-лопастного экскаватора или многоковшового цепного экскаватора, включая передвижное перегрузочное устройство/погрузочное устройство и уступную конвейерную установку, включая уступную ленту в качестве основного компонента, при этом передвижное перегрузочное устройство выполнено с поворотным механизмом/подъемным механизмом,
фиг.2: один из альтернативных вариантов осуществления, при котором дополнительно между колесно-лопастным экскаватором или многоковшовым цепным экскаватором и уступной конвейерной установкой предусмотрена конвейерная тележка.
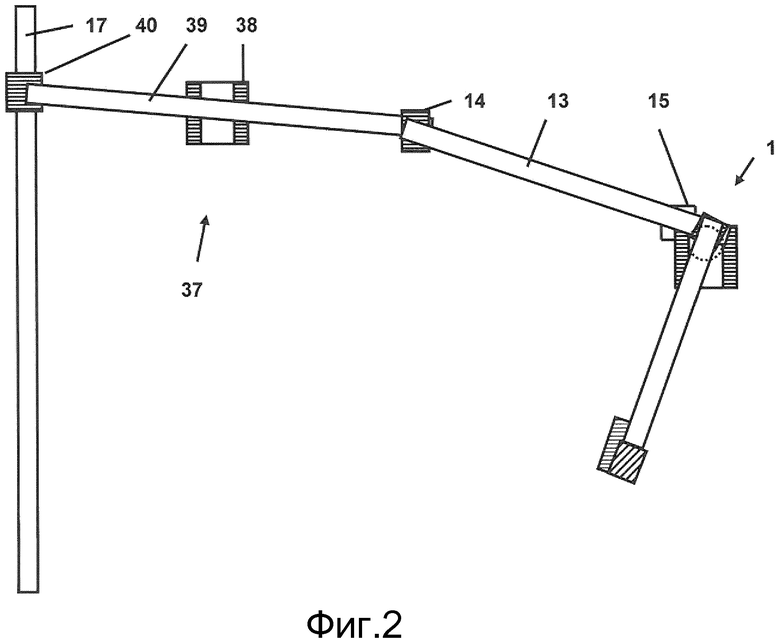
На фиг.1 показан схематичный вид добычных работ с помощью колесно-лопастного экскаватора или многоковшового цепного экскаватора, включая передвижное перегрузочное устройство и уступную конвейерную установку (уступный конвейер), включая уступную ленту (транспортирующую ленту) в качестве основного компонента, при этом передвижное перегрузочное устройство выполнено с поворотным механизмом/подъемным механизмом.
Колесно-лопастной экскаватор или многоковшовый цепной экскаватор 1 имеет добычной агрегат 2 для добываемого материала, например угля или вскрышной породы, и передвижное перегрузочное устройство 12 для добываемого материала в качестве основного компонента.
Добычной агрегат 2 состоит, например, у колесно-лопастного экскаватора из:
- поворотной верхней части 3, снабженной закрепленной на ней наклоняемой стрелой 4, включая приемную ленту,
- закрепленного с концевой стороны на стреле 4 лопастного колеса 5 для добычи добываемого материала, включая желоб 6 (перегрузочное устройство для добываемого материала) для перегрузки добываемого материала с лопастного колеса 5 на приемную ленту,
- передвижной нижней части 9, снабженной гусеницами.
На фиг.1 показаны как направление 10 движения нижней части 9, так и направление поворота/угол 8 поворота стрелы 4 по ширине блока, при этом ширина блока или, соответственно, угол поворота определяет рабочую область, то есть выемку добываемого материала.
Перегрузочное устройство 12 состоит из:
- погрузочной стрелы 13 (выносного конвейера), включая погрузочную ленту и погрузочный желоб 14 (перегрузочный желоб),
- поворотного механизма/подъемного механизма 15 для погрузочной стрелы 13 (закрепленного на добычном агрегате 2),
- приемного желоба 7 (перегрузочного устройства для добываемого материала) для перегрузки добываемого материала с приемной ленты стрелы 4 на перегрузочное устройство 12.
Погрузочное устройство 12 имеет, как уже упомянуто, погрузочный желоб 14 (вращающийся желоб, перегрузочное устройство для добываемого материала, перегрузочный желоб) для перегрузки добываемого материала с погрузочной стрелы 13 на уступную конвейерную установку 17. Кроме того, показана ось 18 уступной ленты, которая образует середину ленты транспортирующей конвейерной установки или, соответственно, уступной конвейерной установки 17.
На фиг.2 показан один из альтернативных вариантов осуществления, при котором дополнительно между колесно-лопастным экскаватором или многоковшовым цепным экскаватором и уступной конвейерной установкой предусмотрена конвейерная тележка. Представлен колесно-лопастной экскаватор или многоковшовый цепной экскаватор 1 с закрепленной над поворотным механизмом/подъемным механизмом 15 погрузочной стрелой 13, при этом погрузочный желоб 14 перегружает добываемый материал на приемную ленту 39 конвейерной тележки 37. Конвейерная тележка 37 посредством своей нижней части 38, снабженной гусеницами, движется предпочтительно параллельно уступной конвейерной установке 17 и перегружает добываемый материал через перегрузочный желоб 40 на уступную ленту уступной конвейерной установки 17.
Для автоматического распознавания и отслеживания положения передвижного перегрузочного устройства 12 или, соответственно, позиционирования погрузочной стрелы 13 для перегрузки добываемого материала на уступную конвейерную установку 17 или на приемную ленту 39 конвейерной тележки 37 важны следующие измерительные датчики:
- измерительный датчик 21 для регистрации текущих пространственных координат xB/yB/zB колесно-лопастного экскаватора или многоковшового цепного экскаватора 1,
- измерительный датчик 22 для регистрации текущих пространственных координат xS/yS/zS оси 18 уступной ленты уступной конвейерной установки 17 (при варианте осуществления в соответствии с фиг.1) или приемной ленты 39 конвейерной тележки 37 (при варианте осуществления в соответствии с фиг.2),
- измерительный датчик 23 для регистрации текущего продольного и поперечного наклона погрузочной стрелы 13,
- измерительный датчик 24 для регистрации текущего угла поворота погрузочной стрелы 13,
- измерительный датчик 25 для регистрации текущей загрузки погрузочной ленты погрузочной стрелы 13,
- измерительный датчик 26 для регистрации текущего расстояния от погрузочной стрелы 13 до рабочего горизонта или, соответственно, над уступной лентой (ленточным транспортером) уступной конвейерной установки 17 (при варианте осуществления в соответствии с фиг.1) или над приемной лентой 39 конвейерной тележки 37 (при варианте осуществления в соответствии с фиг.2),
- измерительный датчик 27 для регистрации текущего вертикального позиционирования погрузочной стрелы 13 над уступной лентой уступной конвейерной установки 17 (при варианте осуществления в соответствии с фиг.1) или над приемной лентой 39 конвейерной тележки 37 (при варианте осуществления в соответствии с фиг.2), включая регистрацию середины ленты,
- измерительный датчик 28 для регистрации текущего состояния загрузки уступной ленты уступной конвейерной установки 17 (при варианте осуществления в соответствии с фиг.1) или приемной ленты 39 конвейерной тележки 37 (при варианте осуществления в соответствии с фиг.2),
- измерительный датчик 29 для регистрации вероятного текущего перекоса уступной ленты уступной конвейерной установки 17 (при варианте осуществления в соответствии с фиг.1) или приемной ленты 39 конвейерной тележки 37 (при варианте осуществления в соответствии с фиг.2),
- измерительный датчик 30 для регистрации текущего углового положения погрузочного желоба 14,
- измерительный датчик 31 для регистрации текущего наклона погрузочного желоба 14,
- измерительный датчик 32 для регистрации объектов в пределах области поворота погрузочной стрелы 13 (защита от соударения),
- измерительный датчик 33 для регистрации текущего перекрытия ленты между приемной лентой стрелы 4 и погрузочной лентой погрузочной стрелы 13 (защита от столкновения),
- измерительный датчик 34 для регистрации текущего перекрытия ленты между погрузочной лентой погрузочной стрелы 13 и уступной лентой уступной конвейерной установки 17 (при варианте осуществления в соответствии с фиг.1) или приемной лентой 39 конвейерной тележки 37 (при варианте осуществления в соответствии с фиг.2) (защита от столкновения).
На устройство 20 регулирования/управления подаются
- сигнал A измерительного датчика 21,
- сигнал B измерительного датчика 22,
- сигнал C измерительного датчика 23,
- сигнал D измерительного датчика 24,
- сигнал E измерительного датчика 25,
- сигнал F измерительного датчика 26,
- сигнал G измерительного датчика 27,
- сигнал H измерительного датчика 28,
- сигнал I измерительного датчика 29,
- сигнал K измерительного датчика 30,
- сигнал L измерительного датчика 31,
- сигнал M измерительного датчика 32,
- сигнал N измерительного датчика 33 и
- сигнал O измерительного датчика 34.
Устройство 20 регулирования/управления обрабатывает эти подаваемые сигналы, связывает их заданным образом и управляет в зависимости от этих сигналов, а также в зависимости от заданных номинальных значений/заданных параметров 35 для приведенных выше измерительных датчиков поворотным механизмом/подъемным механизмом 15, погрузочным желобом 14, а также при необходимости добычным агрегатом 2, см.:
- управляющий сигнал Q для перегрузочного устройства 12,
- управляющий сигнал R для погрузочного желоба 14 и
- управляющий сигнал S для добычного агрегата 2.
При этом устройство 20 регулирования/управления задает угол поворота и наклон погрузочной стрелы 13 перегрузочного устройства 12 в виде сигнала Q в зависимости от сигналов следующих измерительных датчиков:
- сигнала A измерительного датчика 21 для регистрации текущих пространственных координат xB/yB/zB колесно-лопастного экскаватора или многоковшового цепного экскаватора 1,
- сигнала B измерительного датчика 22 для регистрации текущих пространственных координат xS/yS/zS уступной конвейерной установки 17 (при варианте осуществления в соответствии с фиг.1) или приемной ленты 39 конвейерной тележки 37 (при варианте осуществления в соответствии с фиг.2),
- сигнала C измерительного датчика 23 для регистрации текущего продольного и поперечного наклона погрузочной стрелы 13,
- сигнала D измерительного датчика 24 для регистрации текущего угла поворота погрузочной стрелы 13,
- сигнала F измерительного датчика 26 для регистрации текущего расстояния погрузочной стрелы 13 над уступной конвейерной установкой 17 (при варианте осуществления в соответствии с фиг.1) или над приемной лентой 39 конвейерной тележки 37 (при варианте осуществления в соответствии с фиг.2),
- сигнала G измерительного датчика 27 для регистрации текущего вертикального позиционирования погрузочной стрелы 13 над уступной конвейерной установкой 17 (при варианте осуществления в соответствии с фиг.1) или над приемной лентой 39 конвейерной тележки 37 (при варианте осуществления в соответствии с фиг.2), включая регистрацию середины ленты.
Кроме того, устройство 20 регулирования/управления задает угол поворота и наклон погрузочного желоба 14 в виде сигнала R настройки в зависимости от сигналов следующих измерительных датчиков:
- сигнала H измерительного датчика 28 для регистрации текущего состояния загрузки уступной ленты уступной конвейерной установки 17 (при варианте осуществления в соответствии с фиг.1) или приемной ленты 39 конвейерной тележки 37 (при варианте осуществления в соответствии с фиг.2),
- сигнала I измерительного датчика 29 для регистрации вероятного текущего перекоса уступной ленты уступной конвейерной установки 17 (при варианте осуществления в соответствии с фиг.1) или приемной ленты 39 конвейерной тележки 37 (при варианте осуществления в соответствии с фиг.2),
- сигнала K измерительного датчика 30 для регистрации текущего углового положения погрузочного желоба 14,
- сигнала L измерительного датчика 31 для регистрации текущего наклона погрузочного желоба 14.
Для дополнительного улучшения регулирования/управления на устройство 20 регулирования/управления дополнительно подается сигнал E измерительного датчика 25 для регистрации текущей загрузки погрузочной ленты погрузочной стрелы 13. Благодаря этому распознается вероятный затор массы в погрузочном желобе 14, например, обусловленный мокрыми массами или, соответственно, добываемым материалом, и при необходимости подается соответствующий выходной сигнал S добычному агрегату 2, чтобы остановить колесно-лопастной экскаватор или многоковшовый цепной экскаватор и избежать пересыпания через край загрузочного желоба 14.
Во избежание столкновения между погрузочной стрелой 13 и уступной конвейерной установкой 17 (защита от столкновения) на устройство 20 регулирования/управления дополнительно подаются сигналы O измерительного датчика 34 для регистрации текущего перекрытия ленты между погрузочной лентой погрузочной стрелы 13 и уступной лентой уступной конвейерной установки 17 (при варианте осуществления в соответствии с фиг.1) или приемной лентой 39 конвейерной тележки 37 (при варианте осуществления в соответствии с фиг.2) (защита от столкновения).
Во избежание столкновения между погрузочной стрелой 13 и объектом, таким как агрегат или человек, на устройство 20 регулирования/управления дополнительно подаются сигналы M измерительного датчика 32 для регистрации объектов в пределах области поворота погрузочной стрелы 13 (защита от столкновения).
Эти сигналы O, M учитываются при создании сигналов R и Q настройки, при необходимости также S.
В целом при предложенном регулировании/управлении получается высокая степень использования предназначенных для применения компонентов и, в частности, высокая степень использования желаемой функции «работы без оператора». Посредством этого регулирования/управления достигается независимость от влияний окружающей среды, таких как сильное солнечные облучение, сильный дождь, снегопад, туман, мороз. Кроме того, достигается нечувствительность к дымящемуся углю или, соответственно, добываемому материалу. Получается высокая точность в отношении позиционирования и промера кромок ленты, а также регистрации движения ленты. Кроме того, обеспечивается защита как оборудования, так и людей при всех условиях работы.
Список ссылочных обозначений
1 Колесно-лопастной экскаватор или многоковшовый цепной экскаватор
2 Добычной агрегат колесно-лопастного экскаватора или многоковшового цепного экскаватора
3 Поворотная верхняя часть
4 Наклоняемая стрела, включая приемную ленту
5 Лопастное колесо
6 Желоб
7 Приемный желоб погрузочной стрелы 13
8 Направление поворота/угол поворота стрелы 4 по ширине блока
9 Нижняя часть, снабженная гусеницами
10 Направление движения нижней части 9
12 Передвижное перегрузочное устройство колесно-лопастного экскаватора или многоковшового цепного экскаватора
13 Погрузочная стрела (выносной конвейер), включая погрузочную ленту
14 Погрузочный желоб (вращающийся желоб, перегрузочный желоб) перегрузочного устройства
15 Поворотный механизм/подъемный механизм для погрузочной стрелы
17 Уступная конвейерная установка (уступный конвейер), включая уступную ленту
18 Ось уступной ленты = середина ленты уступной конвейерной установки 17
20 Устройство регулирования/управления
21 Измерительный датчик для регистрации текущих пространственных координат xB/yB/zB колесно-лопастного экскаватора или многоковшового цепного экскаватора 1 → сигнал A
22 Измерительный датчик для регистрации текущих пространственных координат xS/yS/zS оси 18 уступной ленты или приемной ленты 39 конвейерной тележки 37 → сигнал B
23 Измерительный датчик для регистрации текущего продольного и поперечного наклона погрузочной стрелы 13 → сигнал C
24 Измерительный датчик для регистрации текущего угла поворота погрузочной стрелы 13 → сигнал D
25 Измерительный датчик для регистрации текущей загрузки погрузочной ленты погрузочной стрелы 13 → сигнал E
26 Измерительный датчик для регистрации текущего расстояния от погрузочной стрелы 13 до рабочего горизонта или, соответственно, над уступной лентой уступной конвейерной установки 17 или над приемной лентой 39 конвейерной тележки 37 → сигнал F
27 Измерительный датчик для регистрации текущего вертикального позиционирования погрузочной стрелы 13 над уступной лентой уступной конвейерной установки 17 или над приемной лентой 39 конвейерной тележки 37, включая регистрацию середины ленты → сигнал G
28 Измерительный датчик для регистрации текущего состояния загрузки уступной ленты уступной конвейерной установки 17 или приемной ленты 39 конвейерной тележки 37 → сигнал H
29 Измерительный датчик для регистрации вероятного текущего перекоса уступной ленты уступной конвейерной установки 17 или приемной ленты 39 конвейерной тележки 37 → сигнал I
30 Измерительный датчик для регистрации текущего углового положения погрузочного желоба 14 → сигнал K
31 Измерительный датчик для регистрации текущего наклона погрузочного желоба 14 → сигнал L
32 Измерительный датчик для регистрации объектов в пределах области поворота погрузочной стрелы 13 (защита от столкновения) → сигнал M
33 Измерительный датчик для регистрации текущего перекрытия ленты между приемной лентой стрелы 4 и погрузочной лентой погрузочной стрелы 13 (защита от столкновения) → сигнал N
34 Измерительный датчик для регистрации текущего перекрытия ленты между погрузочной лентой погрузочной стрелы 13 и уступной лентой уступной конвейерной установки 17 или приемной лентой 39 конвейерной тележки 37 (защита от столкновения) → сигнал O
35 Заданные номинальные значения/заданные параметры
37 Конвейерная тележка
38 Нижняя часть, снабженная гусеницами
39 Приемная лента
40 Перегрузочный желоб
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ДЛЯ ОТКРЫТОЙ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ И СПОСОБ ЕГО РАБОТЫ | 2020 |
|
RU2774885C1 |
| Устройство для контроля и учета работы добычного роторного экскаватора | 1983 |
|
SU1145089A1 |
| Устройство для автоматического регулирования производительности роторного экскаватора | 1979 |
|
SU787560A1 |
| Весодозировочное устройство для роторных экскаваторов | 1991 |
|
SU1816969A1 |
| Способ открытой разработки угольных месторождений и добычной агрегат для его осуществления | 1990 |
|
SU1798503A1 |
| ПЛАВУЧИЙ ГРЕЙФЕРНЫЙ ЗЕМЛЕЧЕРПАТЕЛЬНЫЙ СНАРЯД ДЛЯ ДОБЫЧИ ПЕСКА И ГРАВИЯ | 1992 |
|
RU2034151C1 |
| Роторный экскаватор | 1987 |
|
SU1506034A1 |
| РОТОРНЫЙ ЭКСКАВАТОР | 2001 |
|
RU2208094C2 |
| Одноковшовый экскаватор | 1987 |
|
SU1463870A1 |
| Многоковшовый цепной экскаватор и способ регулирования его привода | 1999 |
|
RU2217553C2 |
Способ распознавания и отслеживания положения передвижного перегрузочного устройства/погрузочного устройства колесно-лопастного экскаватора или многоковшового цепного экскаватора, состоящего из добычного агрегата с поворотной частью с наклоняемой стрелой, нижней части на гусеничном ходу, перегрузочного устройства с погрузочной стрелой. Добываемый материал загружается посредством конвейерной установки. Устройство регулирования задает угол поворота и наклон погрузочной стрелы перегрузочного устройства в зависимости от сигналов следующих измерительных датчиков: регистрации пространственных координат колесно-лопастного или многоковшового экскаватора; регистрации пространственных координат транспортирующей конвейерной установки; регистрации продольного и поперечного наклона погрузочной стрелы; регистрации угла поворота погрузочной стрелы; регистрации расстояния погрузочной стрелы над конвейерной установкой; регистрации вертикального позиционирования погрузочной стрелы над конвейерной установкой; контроля пересыпания. Технический результат - оптимизация способа. 11 з.п. ф-лы, 2 ил.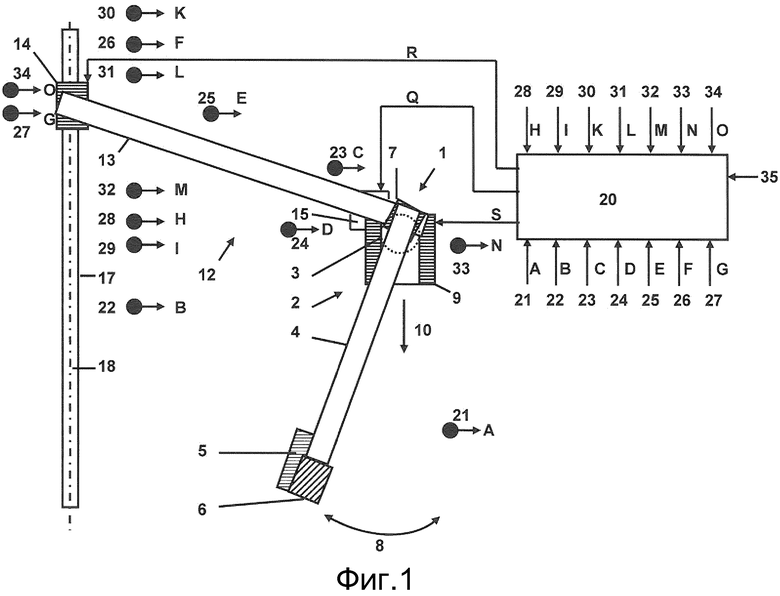
1. Способ распознавания и отслеживания положения передвижного перегрузочного устройства/погрузочного устройства колесно-лопастного экскаватора или многоковшового цепного экскаватора (1), который состоит из добычного агрегата (2) с поворотной верхней частью, снабженной наклоняемой стрелой (4), из нижней части (9) на гусеничном ходу и перегрузочного устройства (12), снабженного погрузочной стрелой (13), и который загружает добываемый материал посредством уступной конвейерной установки (17), снабженной/не снабженной промежуточной конвейерной тележкой (37), или аналогичного перегрузочного пункта, отличающийся тем, что устройство (20) регулирования/управления задает угол поворота и наклон погрузочной стрелы (13) перегрузочного устройства (12) в зависимости от сигналов следующих измерительных датчиков:
- измерительного датчика (21) для регистрации текущих пространственных координат (xB/yB/zB) колесно-лопастного экскаватора или многоковшового цепного экскаватора (1),
- измерительного датчика (22) для регистрации текущих пространственных координат (xS/yS/zS) уступной конвейерной установки (17) или приемной ленты (39) конвейерной тележки (37),
- измерительного датчика (23) для регистрации текущего продольного наклона и поперечного наклона погрузочной стрелы (13),
- измерительного датчика (24) для регистрации текущего угла поворота погрузочной стрелы (13),
- измерительного датчика (26) для регистрации текущего расстояния погрузочной стрелы (13) над уступной конвейерной установкой (17) или над приемной лентой (39) конвейерной тележки (37),
- измерительного датчика (27) для регистрации текущего вертикального позиционирования погрузочной стрелы (13) над уступной конвейерной установкой (17) или над приемной лентой (39) конвейерной тележки (37), включая регистрацию середины ленты,
- измерительного датчика для контроля пересыпания через край в/на месте перегрузки погрузочной стрелы (13).
2. Способ по п. 1, при котором погрузочная стрела (13) через погрузочный желоб (14) подает добываемый материал на уступную конвейерную установку (17) или на приемную ленту (39) конвейерной тележки (37), причем устройство регулирования/управления (20) задает угол поворота и наклон погрузочного желоба (14) в зависимости от сигналов следующих измерительных датчиков:
- измерительного датчика (28) для регистрации текущего состояния загрузки уступной ленты уступной конвейерной установки (17) или приемной ленты (39) конвейерной тележки (37),
- измерительного датчика (29) для регистрации вероятного текущего перекоса уступной ленты уступной конвейерной установки (17) или приемной ленты (39) конвейерной тележки (37),
- измерительного датчика (30) для регистрации текущего углового положения погрузочного желоба (14),
- измерительного датчика для регистрации текущего наклона погрузочного желоба (14).
3. Способ по п. 1 или 2, отличающийся тем, что на устройство (20) регулирования/управления дополнительно подают сигналы измерительного датчика (25) для регистрации текущей загрузки погрузочной ленты погрузочной стрелы (13).
4. Способ по любому из пп. 1, 2, отличающийся тем, что на устройство (20) регулирования/управления дополнительно подают сигналы измерительного датчика (33) текущего перекрытия ленты между приемной лентой стрелы (4) и погрузочной лентой погрузочной стрелы (13).
5. Способ по п. 3, отличающийся тем, что на устройство (20) регулирования/управления дополнительно подают сигналы измерительного датчика (33) текущего перекрытия ленты между приемной лентой стрелы (4) и погрузочной лентой погрузочной стрелы (13).
6. Способ по любому из пп. 1, 2 или 5, отличающийся тем, что на устройство (20) регулирования/управления дополнительно подают сигналы измерительного датчика (34) для регистрации текущего перекрытия ленты между погрузочной лентой погрузочной стрелы (13) и уступной лентой уступной конвейерной установки (17) или приемной лентой (39) конвейерной тележки (37).
7. Способ по п. 3, отличающийся тем, что на устройство (20) регулирования/управления дополнительно подают сигналы измерительного датчика (34) для регистрации текущего перекрытия ленты между погрузочной лентой погрузочной стрелы (13) и уступной лентой уступной конвейерной установки (17) или приемной лентой (39) конвейерной тележки (37).
8. Способ по п. 4, отличающийся тем, что на устройство (20) регулирования/управления дополнительно подают сигналы измерительного датчика (34) для регистрации текущего перекрытия ленты между погрузочной лентой погрузочной стрелы (13) и уступной лентой уступной конвейерной установки (17) или приемной лентой (39) конвейерной тележки (37).
9. Способ по любому из пп. 1, 2, 5, 7 или 8, отличающийся тем, что на устройство (20) регулирования/управления дополнительно подают сигналы измерительного датчика (32) для регистрации объектов в пределах области поворота погрузочной стрелы (13).
10. Способ по п. 3, отличающийся тем, что на устройство (20) регулирования/управления дополнительно подают сигналы измерительного датчика (32) для регистрации объектов в пределах области поворота погрузочной стрелы (13).
11. Способ по п. 4, отличающийся тем, что на устройство (20) регулирования/управления дополнительно подают сигналы измерительного датчика (32) для регистрации объектов в пределах области поворота погрузочной стрелы (13).
12. Способ по п. 6, отличающийся тем, что на устройство (20) регулирования/управления дополнительно подают сигналы измерительного датчика (32) для регистрации объектов в пределах области поворота погрузочной стрелы (13).
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ И РАЗГРУЗКИ ТРАНСПОРТНЫХ СРЕДСТВ | 1993 |
|
RU2092423C1 |
| Устройство для регулирования вертикальных ветродвигателей при помощи руля | 1935 |
|
SU45852A1 |
| УСТРОЙСТВО ГРУЗОПОДЪЕМНОЕ | 2005 |
|
RU2311335C2 |
| DE 4133392 C1, 24.12.1992 | |||
| DE 0019726554 А1, 24.12.1998 | |||

