Изобретение относится к горному делу, а именно к открытьом разработкам месторождений полезных ископаемых, и может быть использовано для автоматического управления роторным экскаваторами, работающими на погру не горной массы на сборный конвейер Известны устройства для автомати ческого непрерывного регулирования производительности роторного экскаватора, в котррых производится срав нение текущей объемной или весовой .производительности экскаватора с заданной и вырабатывается соответст вующее управляющее воздействие, поступающее на привод поворота роторной стрелы догрузочного экскаватора 1 . Эти устройства предназначены для регулирования производительности одного роторного экскаватора, их применение при работе с другим экск ватором на сборный конвейерзатруднительно. Наиболее близким по технической сущности и достигаемому эффекту к изобретен.ию является устройство для автоматического регулирования производительности роторных экскаваторов при работе на сборный конвейер, содержащее задатчик производительности роторного комплекса, подключенный к одному из входов сумматора другие входы которого подключены к датчикам текущей производительности основного и догрузочного экскаваторов, а выход сумматора подключен че рез усилитель к приводу поворота роторной стрелы догрузочного экскаватора. Кроме того, это устройство снабжено самоходной тележкой с при водом для ее перемещения, на которой установлен датчик текущей производительности основного экскаватора, причем привод перемещения самоходной тележки электрически соединен с приводом перемещения самоходного загрузочного бункера догрузочного экскаватора с возможностью синхронного перемещения тележки и бункера на рас стоянии друг от друга, определяемом из соотношений g. L VT и Т Е.где L - расстояние от датчика производительности основного экскаватора до загрузочного самоходного бункера догрузоч ного экскаватора, м; Т - время запаздывания транспортирования горной массы по конвейерам догрузочного экскаватора и перегружателя до самоходного разгрузочного бункера догрузочного экскаватора, с; V - скорость транспортерной ленты сборного конвейера., м/с; ij, - длина каждого конвейера на догрузочном .экскаваторе и перегружателе,- м; 1 - число конвейеров на догрузочном экскаваторе и перегружателе самоходного загрузочного бункера; V- - скорость ленты каждого конвейера, м/с. Приведенные соотношения L и Т Учитывают транспортное запаздывание при прохождении потоками горной мас;сы по сборному конвейеру от основного экскаватора и конвейерам догрузочного экскаватора и перегружателя до момента встречи этих потоков в самоходном загрузочном бункере догрузочного экскаватора 2J. Однако наличие дополнительной самоходной тележки с датчиком текущей производительности основного экскаватора, установленной на магистральном сборном конвейере, затрудняет пер-едвижку конвейерной линии. Кроме того, необходимы дополнительные затраты на ее демонтаж и монтаж с повторной настройкой измерительной системы датчика производительности после передвижки, что снижает надеж-ность работы и эффективность регулирования производительности догрузочного экскаватора. Все это отрицательно сказывается и На удобстве эксплуатации. Цель изобретения - повышение эффективности .регулирования и удобства эксплуатации, Поставленная цель достигается тем, что устройство для автоматического регулирования производительности догрузочного экскаватора роторного комплекса, содержащее задатчик производительности роторного комплекса, подключенный к одному из входов сумматора, другой вход которого подключен к датчику текущей производительности догрузочного экскаватора, а выход сумматора подключен через усилитель к приводу поворота роторной стрелы догрузочного экскаватора, и датчик .текущей производительности основного экскаватора, снабжено блоком определения задержки и дальномером автоматического измерения расстояния, при этом датчик текущей производительности основного экскаватора установлен на конвейер его роторной стрелы и подключен к сумматору через блок определения задержки, другой вход которого подключен к выходу ..дальномера автоматического измерения расстояния, который выполнен в виде, соединенных между -собой передатчийа и приемника, расположенных на одном из самоходных загрузочных бункеров и оптически связанных между собой через отражатель, расположенный на другом самоходном загрузочном бункере. На чертеже изображена функциональ ная схема устройства для автома;тического регулирования производительности Догрузочного экскаватора ротор ного комплекса. Устройство содержит задатчик производительности роторного комплекса 1, подключенный к сумматору 2, выход которого через усилитель 3 подключен к приводу 4 поворота роторной стрелы Догрузочного экскаватора 5, работающего на догрузке сборного конвейера 6, загружаемого основным экскаватором -7. Конвейер роторной стрелы догрузоч ного экскаватора 5 оснащен датчиком 8 его текущей производительности, подключенньом к сумматору 2. На конвейер роторной стрелы основного экскаватора 7 установлен датчик 9 его текущей производительности, подключенный к -блоку определения задер) 10, выход которого подключен к сумматору 2. К другому входу блока определения задержки 10 подключен выход дальномера автоматического измерения расстояния между самоходными загрузочными бункерами 11 и 12 выполненного в виде соединенных между собой передатчика 13 и приемника 14 (например ПК-излучения), расположенных на самоходных загрузочном бункере 12 основного экскаватора. 7 и связанных между собой через отражатель 15, установленный на самоходном загрузочном бункере 11 Догрузочного экскаватора 5. Устройство работает следующим образом. . Сигнал с задатчика Производительности роторного комплекса 1 в:Сумматоре 2 сравнивается с сигналами с датчиков 8 и 9 текущей производительности Догрузочного 5 и основного 7.экскаваторов. При этом сигнал с датчика 9 текущей производительности основного экскаватора 7 задерж вается в блоке определения задержки на время Т-, вычисляемое в нем в соответствии с сигналами с дальномера автоматического измерения расстояния 13 - 15 по следующим формулам: гр гр m . J-J J-o I Т : Г ЕШ. + О Vp V I где T,j - время задержки сигнала производительности основного экскаватора, с; Тр - общее время транспортирования горной массы от датчика производительности от основного экскаватора до самоходного загрузочного бункера Догрузочного экскаватора , с; рт длина каждого конвейера ос новного экскаватора, м; скорость ленты каждого конвейера основного экскаватора, м/с; расстояние между самоходными загрузочными бункерами сборного конвейера, м; скорость транспортной ленты сборного конвейера, м/с; m - число конвейеров на основном экскаваторе; 1 -- Z:r- время запаздывания транс портированйя горной массы по сборному конвейеру и конвейерам Догрузочного экскаватора до момента-встречи грузовых потоков в самоходном загрузочном бункере, с;. . L - расстояние от места вьщачи сигнала с производительности основного экскаватора до самоходного загрузочного бункера ДОГРУЗОЧНОГО экскаватора, м; t- - длина каждого конвейера на догрузочном экскаваторе, м; Vj, - скорость ленты каждого транспортераj м/с; i - число конвейеров на догрузочном экскаваторе до самоходного загрузочного бун. кера. Приведенные выше соотношения учитывают транспортное запаздывание при прохождении потоков горной массы, по конвейерам основного экскаватора и сборному конвейеру, а также по конвейерам догружающего экскаватора до момента встречи этих потоков в самоходном загрузочном бункере. Сигнал рассогласования с выхода сумматора 2 усиливается в усилителе 3 и подается на привод 4 поворота роторной стрелы для регулирования скорости поворота роторной стрелы догрузочного экскаватора 5, вследствие чего производится регулирование его производительности. При этом по.ток горной массы от роторного догрузочного экскаватора 5 за время Т проходит все конвейеры до самоходного загрузочного бункера 11, где суммируется с потоком горной массы, измеренным датчиком 9, текущей производительности основного экскаватора, сигнал с которого задерживается на время Tj ; TO - Т блоком определения задержки 10. Задержки сигнала на время Tj соответствует месту 16 выдачи сигнала о производительности основного экскаватора 7 на расстоянии L от самоходного загрузочного бункера 11, учитывающего время запаздывания прохождения потока горной массы по конвейерам Догрузочного бункера 11. .
В результате измеренные потоки горной массы сборного конвейера от основного экскаватора 7 и догрузочного экскаватора 5 одновременно встречеиотся в самоходном загрузочном бункере 11, обеспечивая тем самым автоматически Заданную производительность роторного комплекса в зависимости от текущей. производи тельности основного экскаватора 7 без перегрузки, просыпания и заштыбовки самоходного загрузочного бункера 11 горной массой.
В результате обеспечивается стабилизация грузопотока сборного конвейера роторного комплекса и снижается время простоев на расчистку сборного конвейера и его передвижку что повышает эффективность реплирования, удобство эксплуатации иоторного комплекса и его производительность .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования производительности роторного экскаватора | 1979 |
|
SU787560A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| КОМПЛЕКС ДЛЯ ОТКРЫТОЙ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ И СПОСОБ ЕГО РАБОТЫ | 2020 |
|
RU2774885C1 |
| Устройство для автоматического управления роторным экскаватором | 1987 |
|
SU1434039A1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU876867A1 |
| Устройство для контроля и учета работы добычного роторного экскаватора | 1983 |
|
SU1145089A1 |
| Устройство для автоматического управления роторным экскаватором | 1981 |
|
SU988987A1 |
| Устройство для автоматического регулирования загрузки бункера-перегружателя | 1985 |
|
SU1268494A1 |
| Способ управления роторным комплексом и устройство для его осуществления | 1987 |
|
SU1537776A1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО- РЕГУЛИРОВАНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ДОГРУЗОЧНОГО ЭКСКАВАТОРА РОТОРНОГО КОМПЛЕКСА, содержащее задатчик. производительности роторного комплекса, подключенный к одному из; : сумматора, другой вход которого подключен к Датчику текущей производительности ДОГРУЗОЧНОГО экскаватора, а выход сумматора подключен через усилитель к приводу поворота роторной стрелы ДОГРУЗОЧНОГО экскаватора, и датчик текущей производительности основного экскаватора, о т л и ч а ю-, щ е е с я тем, что, с целью повыше-, ния эффективности регулирования и удобства эксплуатации, оно снабжено блоком определения задержки и дальномером автоматического измерения расстояния, при этом датчик текущей производительности основного экскаватора установлен на конвейер его роторной стрелы и подключен к cjMMaтору через блокопределения задержки, другой вход которого подключен к выходу дсшьномера автоматического измерения расстояния, который выполнен в виде соединенных между собой передатчика и приемника, располо(Л женных на однсяй из самоходных загрузочных бункеров и оптически связанных между собой череЭ- отражатель, расположенный на другом самоходном загрузочном бункере. . . -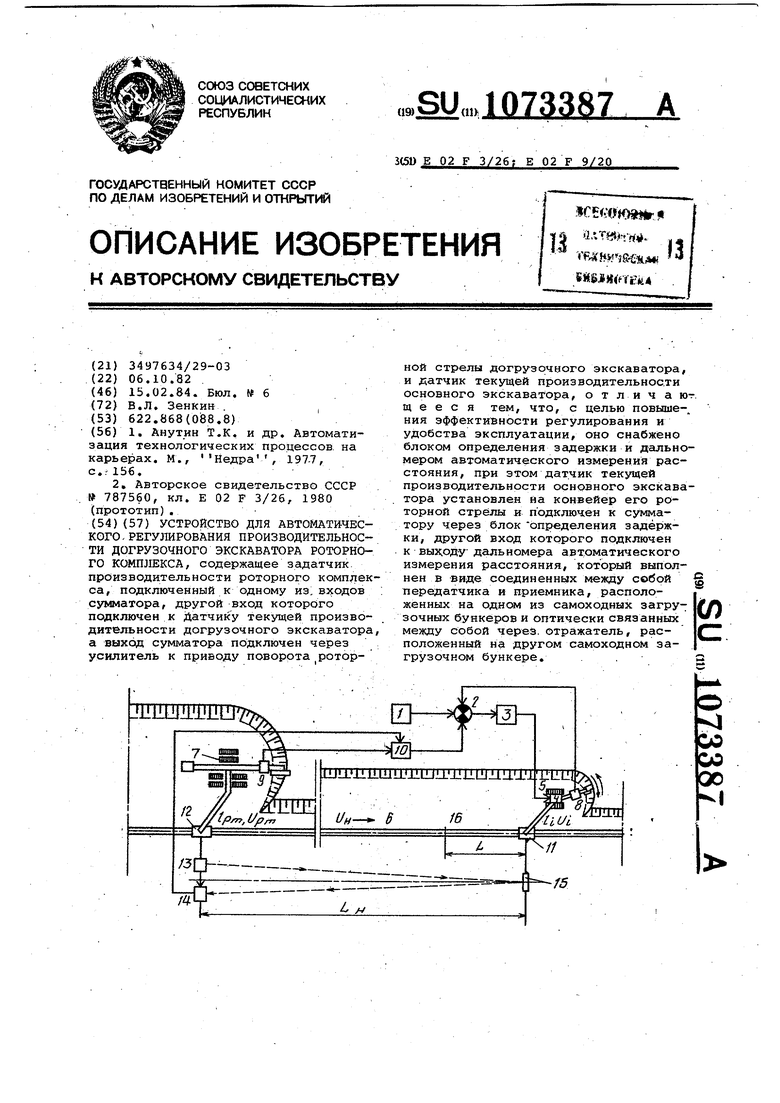
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| и др | |||
| Автоматизация технологических процессов, на карьерах | |||
| М., Недра, 197-7, с.-156 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического регулирования производительности роторного экскаватора | 1979 |
|
SU787560A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
