Область техники
Настоящее изобретение относится к общей технической области лечения глазных патологий с использованием терапевтического оборудования, предназначенного для осуществления операций на глазу и, в частности:
- операций на переднем сегменте глаза, например, в случае катаракты (на хрусталике) и /или
- операций рефракционной хирургии (на роговице) и/или
- операций, предназначенных для лечения глаукомы или других патологий сетчатки.
Более конкретно, изобретение относится к устройству и способу для контроля перемещения системы лечения глазной патологии, установленной на шарнирном роботизированном манипуляторе, для обеспечения ее перемещения по трем ортогональным осям Х, Y и Z.
В целом настоящее изобретение находит свое применение, когда терапевтическое оборудование должно работать в глазу на поверхности или в глубине при помощи физических средств (таких как световые волны, ультразвук, микроволны и т.д.), траекторию которых необходимо точно контролировать, чтобы достигать цели, не повреждая смежные структуры.
В дальнейшем изобретение будет описано со ссылками на терапевтическое оборудование, включающее в себя шарнирный роботизированный манипулятор, оснащенный системой разрезания человеческой или животной ткани, такой как роговица или хрусталик, при помощи фемтосекундного лазера.
Однако для специалиста в данной области ясно, что описанное ниже изобретение можно использовать для управления перемещением шарнирного роботизированного манипулятора, содержащего любой другой тип системы лечения глазной патологии.
Уровень техники
Существуют многие виды терапевтического оборудования, содержащего лазер для лечения глазной патологии. При этом лазер используют в качестве оптического скальпеля.
Такой лазер может производить рассечение прозрачных тканей глаза по глубине без использования хирургических инструментов. Его преимуществом является скорость и хорошая переносимость, а особенно возможность отказаться от ручного хирургического жеста, который является зависимым от оператора фактором.
Таким образом, хирургия, применяемая при помощи лазера, становится исключительно точной и повторяемой. Она дает гарантию безопасности, которой невозможно добиться при жесте, выполняемом оператором-человеком, поэтому использование лазера позволяет предусматривать почти автоматизированную хирургию, при которой машина осуществляет этапы хирургической операции вместо врача.
Чтобы терапевтическое оборудование, содержащее лазер, могло осуществлять этапы лечебной процедуры, необходимо предварительно осуществить две основные фазы:
i) зафиксировать терапевтическое оборудование на глазу, чтобы препятствовать движениям глаза во время лечебной процедуры и чтобы совместить ось глаза с системой координат машины; таким образом, машина и глаз оказываются совмещенными и неподвижно соединенными, и лечение можно начать в условиях полной безопасности, не опасаясь смещения или перемещения в ходе процедуры,
ii) создать картографию внутриглазных структур пациента при помощи встроенной системы съемки изображений типа ОКТ (оптическая когерентная томография) или технологии съемки по принципу Шаймпфлюга (картография в видимом свете), или УБМ (ультразвуковая биомикроскопия), чтобы наметить контуры зон, которые будут обработаны лазерным лучом для их разрезания или фрагментации.
Для осуществления этапа i) необходимо позиционировать на глазу пациента элемент иммобилизации, оснащенный всасывающим кольцом, которое присасывается к глазу и надежно удерживает его на месте.
В настоящее время терапевтическое оборудование, действующее в глазу и требующее иммобилизации глазного яблока во время фаз i) и ii) (затем во время фазы лечения), оснащено элементом иммобилизации, которым оператор манипулирует вручную.
Такое терапевтическое оборудование имеет ряд недостатков:
- ручное позиционирование элемента иммобилизации подвержено некоторой вариативности, которая зависит от многих факторов; в частности, качество позиционирования элемента иммобилизации варьируется от одного оператора к другому; это приводит к вариативности условий иммобилизации пациентов, при этом следует иметь в виду, что качество лечения во многом зависит от качества позиционирования элемента иммобилизации;
- время, необходимое для позиционирования элемента иммобилизации оператором (таким как хирург), является очень ценным и, следовательно, очень дорогим по сравнению с действием, которое можно было бы доверить машине, которая может осуществлять его очень точно, повторяемым образом и с намного меньшими затратами,
- манипулирование элементом иммобилизации часто является трудоемким, поскольку оператор не находится в оптимальных условиях и часто встречает различные препятствия при наблюдении глазного яблока, которые не дают ему определить, является ли позиционирование элемента иммобилизации правильным или нет,
- способность оператора судить о нормальном позиционировании элемента иммобилизации глаза, которая должна быть основана на показателях, требующих точек отсчета в пространстве (уровень центровки, присутствие наклона, вращения и т.д.), является намного более низкой, чем у машины, которая оснащена датчиками и системами получения изображений, способными корректировать погрешности позиционирования по осям Х, Y или Z или по положению в пространстве с исключительно точными уровнями разрешения,
- в зависимости от умения оператора пациенты могут испытывать дискомфорт, могут подвергаться порезу или плохому позиционированию элемента иммобилизации, которое может сказаться на эффективности лечения.
Настоящее изобретение призвано предложить умную и автономную систему, использующую роботизированные движения, средства визуализации, датчики и возможности интерпретации изображений, полученных при помощи встроенной системы сбора данных, чтобы автоматизировать фазу установки на место элемента иммобилизации глазного яблока.
Раскрытие изобретения
Для этого объектом изобретения является устройство для контроля перемещения аппарата глазной терапии, содержащего:
- манипулятор, при этом свободный конец манипулятора предназначен для размещения напротив человеческой или животной глазной ткани, указанный манипулятор является шарнирным для обеспечения перемещения свободного конца манипулятора по трем попарно ортогональным осям Х, Y и Z:
- по оси Х, определяющей горизонтальное продольное направление,
- по оси Y, определяющей горизонтальное поперечное направление, которое вместе с осью Х образует горизонтальную плоскость XY,
- по оси Z, определяющей вертикальное направление, перпендикулярное к горизонтальной плоскости XY,
- систему сбора данных, установленную на манипуляторе и предназначенную для получения пары измерений, включающей в себя:
- изображение глазной ткани, и
- сигнал, характеризующий вертикальное расстояние вдоль оси Z между концом манипулятора и глазной тканью,
характеризующееся тем, что устройство контроля содержит:
- средства управления системой сбора данных для получения множества пар измерений последовательно во времени,
- средства обработки каждой пары измерений, при этом указанные средства обработки включают в себя:
- средства оценки, на основании текущей пары измерений, вертикального расстояния вдоль оси Z между концом манипулятора и глазной тканью,
- средства вычисления, на основании изображения текущей пары измерений, горизонтального отклонения между:
- текущим горизонтальным положением свободного конца манипулятора в горизонтальной плоскости XY, и
- определенным конечным горизонтальным положением свободного конца манипулятора в горизонтальной плоскости XY,
- средства автоматического регулирования, выполненные с возможностью:
- если вычисленное горизонтальное отклонение превышает первое пороговое значение, генерировать управляющий сигнал горизонтального перемещения манипулятора в горизонтальной плоскости XY, чтобы уменьшить отклонение между текущим горизонтальным положением и указанным определенным конечным горизонтальным положением,
- если вычисленное горизонтальное отклонение меньше первого порогового значения и если оцененное вертикальное расстояние превышает второе пороговое значение, генерировать управляющий сигнал вертикального перемещения манипулятора в вертикальном направлении, чтобы уменьшить расстояние между свободным концом манипулятора и глазной тканью,
- если вычисленное горизонтальное отклонение меньше первого порогового значения и если измеренное вертикальное расстояние меньше второго порогового значения, генерировать управляющий сигнал иммобилизации манипулятора.
Таким образом, изобретение позволяет сделать фазу установки терапевтического оборудования более точной, повторяемой и более дешевой, чем в существующих решениях.
Устройство контроля имеет следующие предпочтительные, но не ограничительные признаки:
- средства вычисления могут содержать:
- средства обнаружения, на основании изображения из текущей пары измерений, горизонтального положения по меньшей мере одной интересующей точки глазной ткани,
- средства оценки, на основании обнаруженного горизонтального положения интересующей точки, горизонтального отклонения между:
- текущим горизонтальным положением свободного конца манипулятора в горизонтальной плоскости XY, и
- определенным конечным горизонтальным положением свободного конца манипулятора в горизонтальной плоскости XY;
- средства обнаружения могут быть выполнены с возможностью идентифицировать глазную ткань в полученном изображении посредством применения алгоритма распознавания формы для обнаружения трех концентричных окружностей на изображении;
- терапевтический аппарат может дополнительно содержать датчик силы, установленный на свободном конце манипулятора для измерения механической силы, прикладываемой к свободному концу манипулятора;
- при этом средства обработки содержат средства сравнения указанной измеренной механической силы с третьим пороговым значением, чтобы определить, входит ли свободный конец манипулятора в контакт с элементом, образующим препятствие для вертикального перемещения манипулятора вдоль оси Z,
- при этом средства автоматического регулирования запрограммированы таким образом, чтобы генерировать управляющий сигнал иммобилизации манипулятора, если измеренная механическая сила превышает третье пороговое значение;
- для получения сигнала, характеризующего вертикальное расстояние вдоль оси Z, система сбора данных может содержать:
- средства для получения данных посредством лазерной телеметрии, и/или
- средства для получения данных при помощи ультразвуков,
- средства для получения данных посредством обработки изображения;
- средства автоматического регулирования могут быть запрограммированы таким образом, чтобы генерировать управляющие сигналы для обеспечения перемещения манипулятора между его текущим положением и определенным конечным положением, при этом указанные средства автоматического регулирования генерируют управляющий сигнал иммобилизации вслед за каждым управляющим сигналом элементарного перемещения.
Объектом изобретения является также способ контроля перемещения аппарата глазной терапии, содержащего:
- манипулятор, при этом свободный конец манипулятора предназначен для размещения напротив человеческой или животной глазной ткани, при этом указанный манипулятор является шарнирным для обеспечения перемещения свободного конца манипулятора по трем попарно ортогональным осям Х, Y и Z:
- по оси Х, определяющей горизонтальное продольное направление,
- по оси Y, определяющей горизонтальное поперечное направление, которое вместе с осью Х образует горизонтальную плоскость XY,
- по оси Z, определяющей вертикальное направление, перпендикулярное к горизонтальной плоскости XY,
- систему сбора данных, установленную на манипуляторе и предназначенную для получения пары измерений, включающей в себя:
- изображение глазной ткани, и
- сигнал, характеризующий вертикальное расстояние вдоль оси Z между концом манипулятора и глазной тканью,
характеризующийся тем, что способ контроля содержит следующие фазы:
- считывают множество пар измерений последовательно во времени при помощи системы сбора данных,
- обрабатывают каждую пару измерений, при этом фаза обработки содержит следующие этапы:
- на основании текущей пары измерений оценивают вертикальное расстояние вдоль оси Z между концом манипулятора и глазной тканью,
- на основании изображения из текущей пары измерений вычисляют горизонтальное отклонение между:
- текущим горизонтальным положением свободного конца манипулятора в горизонтальной плоскости XY, и
- определенным конечным горизонтальным положением свободного конца манипулятора в горизонтальной плоскости XY,
- производят автоматическое регулирование перемещения манипулятора, при этом:
- если вычисленное горизонтальное отклонение превышает первое пороговое значение, генерируют управляющий сигнал горизонтального перемещения манипулятора в горизонтальной плоскости XY, чтобы уменьшить отклонение между текущим горизонтальным положением и определенным конечным горизонтальным положением,
- если вычисленное горизонтальное отклонение меньше первого порогового значения и если оцененное вертикальное расстояние превышает второе пороговое значение, генерируют управляющий сигнал вертикального перемещения манипулятора в вертикальном направлении, чтобы уменьшить расстояние между свободным концом манипулятора и глазной тканью,
- если вычисленное горизонтальное отклонение меньше первого порогового значения и если измеренное вертикальное расстояние меньше второго порогового значения, генерируют управляющий сигнал иммобилизации манипулятора.
Способ контроля имеет следующие предпочтительные, но не ограничительные признаки:
- этап вычисления может содержать следующие подэтапы:
- на основании изображения из текущей пары измерений обнаруживают горизонтальное положение по меньшей мере одной интересующей точки глазной ткани,
- на основании обнаруженного горизонтального положения интересующей точки оценивают горизонтальное отклонение между:
- текущим горизонтальным положением свободного конца манипулятора в горизонтальной плоскости XY, и
- определенным конечным горизонтальным положением свободного конца манипулятора в горизонтальной плоскости XY;
- на подэтапе обнаружения можно идентифицировать глазную ткань в полученном изображении посредством применения алгоритма распознавания формы для обнаружения трех концентричных окружностей на изображении;
- терапевтический аппарат может дополнительно содержать датчик силы, установленный на свободном конце манипулятора для измерения механической силы, прикладываемой к свободному концу манипулятора;
- при этом фаза обработки содержит этап сравнения указанной измеренной механической силы с третьим пороговым значением, чтобы определить, входит ли свободный конец манипулятора в контакт с элементом, образующим препятствие для вертикального перемещения манипулятора вдоль оси Z,
- этап автоматического регулирования включает в себя генерирование управляющего сигнала иммобилизации, если измеренная механическая сила превышает третье пороговое значение;
- фаза получения данных может содержать:
- получение посредством лазерной телеметрии сигнала, характеризующего вертикальное расстояние вдоль оси Z, и/или
- получение при помощи ультразвука сигнала, характеризующего вертикальное расстояние вдоль оси Z, и/или
- выделение в полученном изображении сигнала, характеризующего вертикальное расстояние вдоль оси Z;
- этап автоматического регулирования может содержать:
- генерирование управляющего сигнала элементарного перемещения для обеспечения перемещения манипулятора между его текущим положением и определенным конечным положением,
- генерирование управляющего сигнала иммобилизации вслед за каждым управляющим сигналом элементарного перемещения,
- повторение предыдущих подэтапов, пока вычисленное горизонтальное отклонение не станет меньше первого порогового значения и пока измеренное вертикальное расстояние не станет меньше второго порогового значения.
Краткое описание чертежей
Другие признаки и преимущества изобретения будут более очевидны из нижеследующего описания нескольких вариантов выполнения, представленных в качестве не ограничительных примеров, со ссылками на прилагаемые чертежи, на которых:
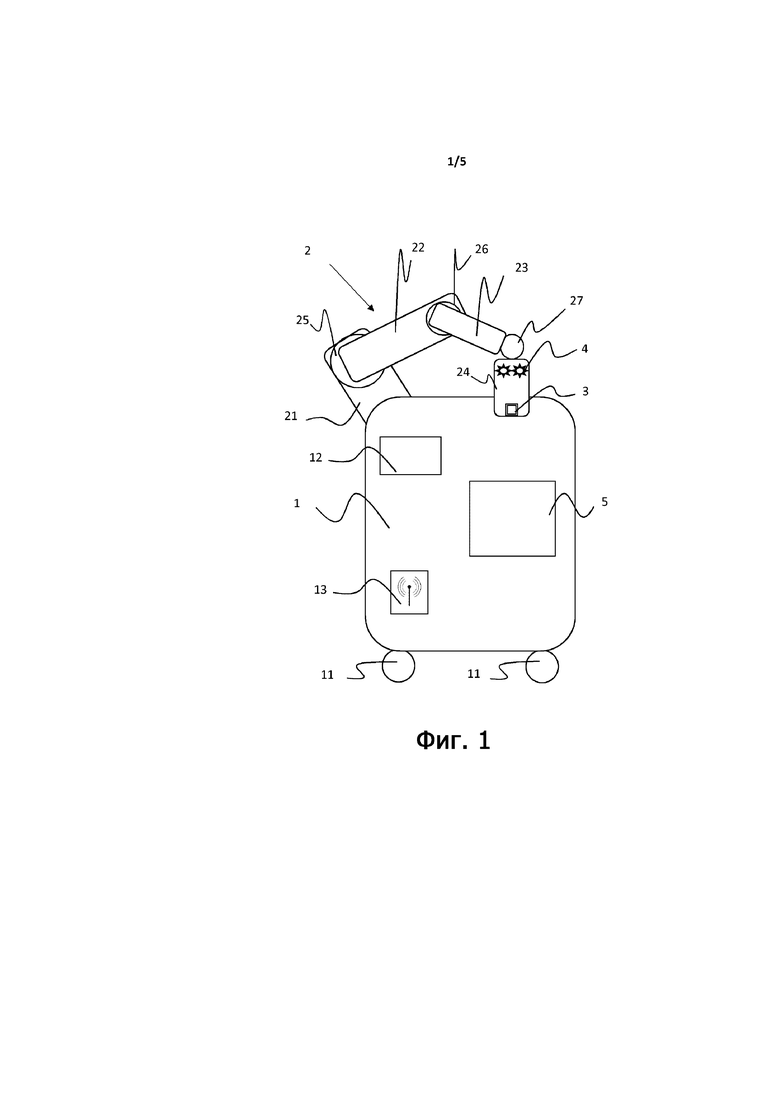
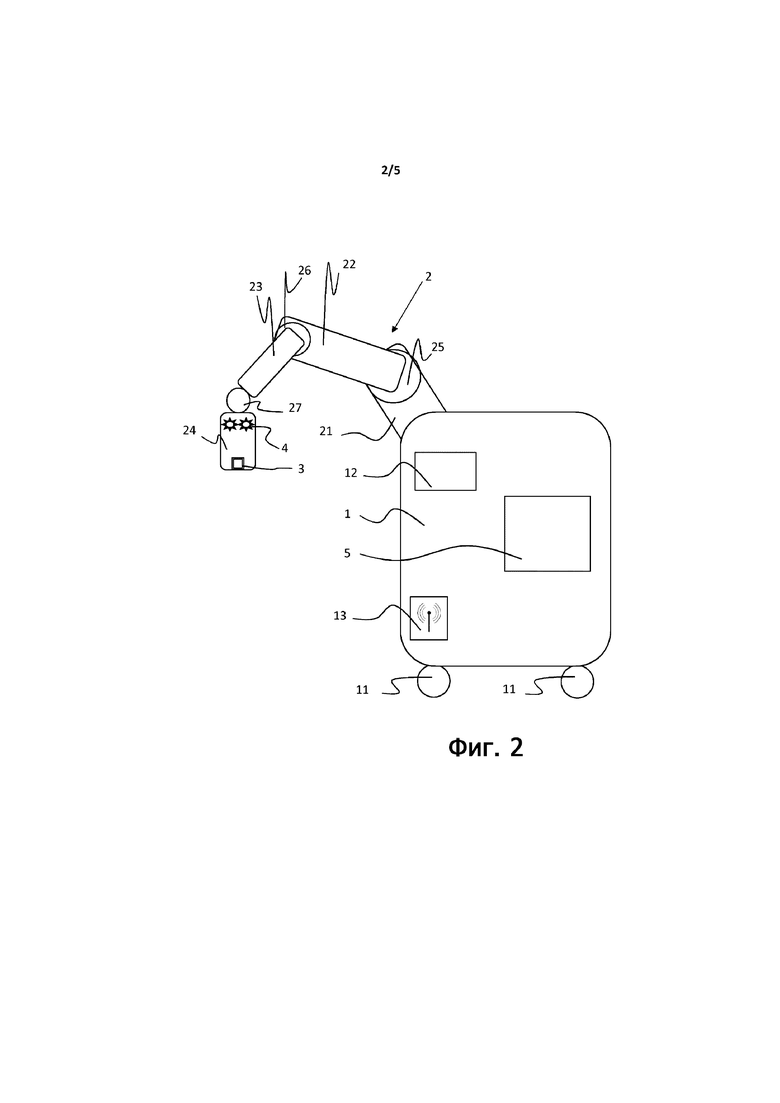
Фиг. 1 и 2 - терапевтический аппарат, включающий в себя манипулятор и заявленное устройство контроля, при этом манипулятор показан:
- в убранном положении на фиг. 1, и
- в развернутом положении на фиг. 2.
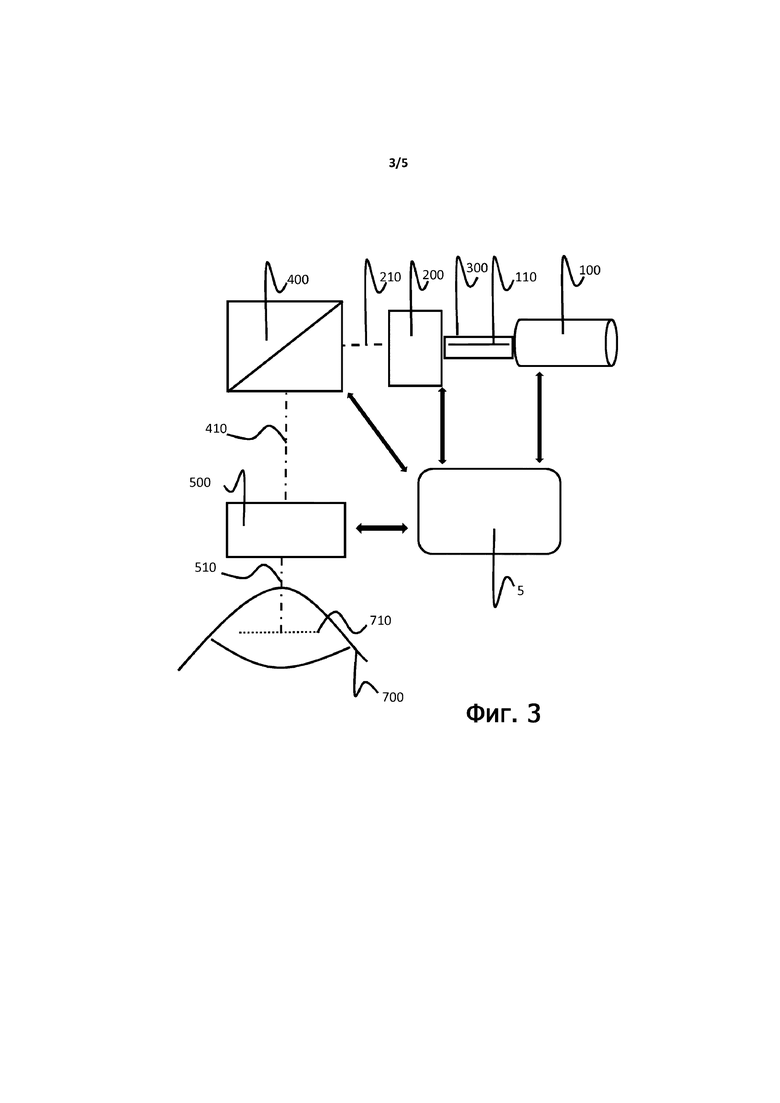
Фиг. 3 - схематичный вид системы разрезания, встроенной в терапевтический аппарат.
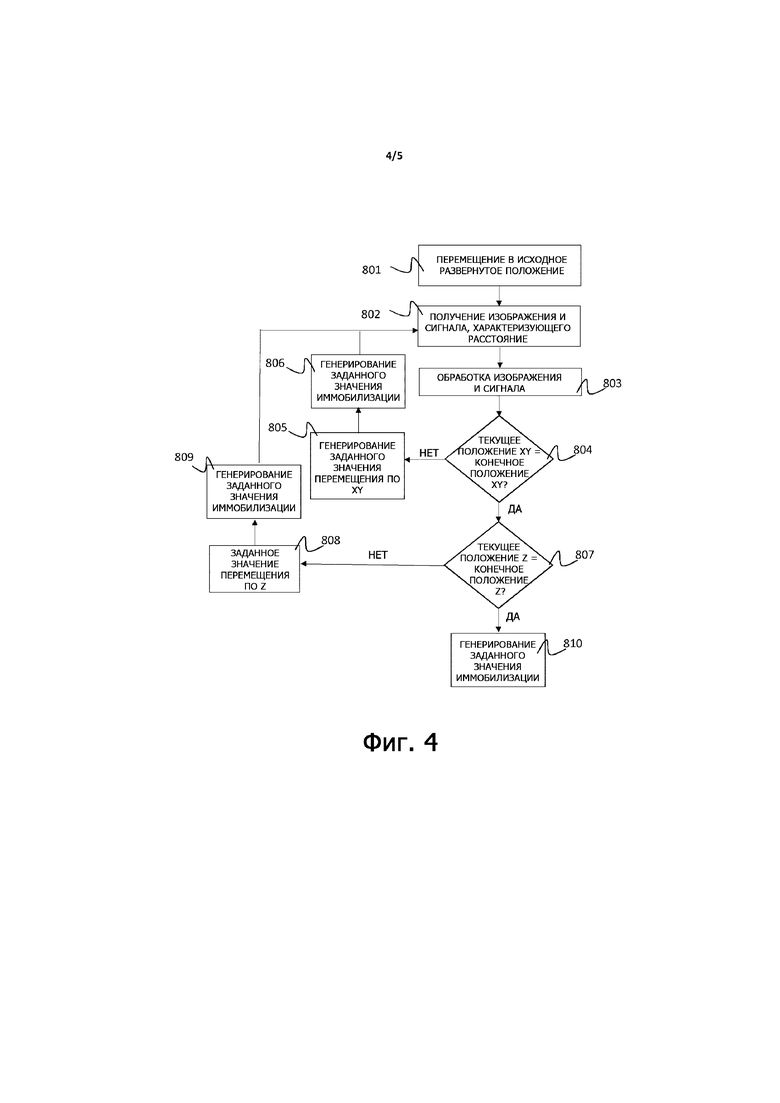
Фиг. 4 - схема этапов способа контроля, осуществляемого в устройстве контроля.
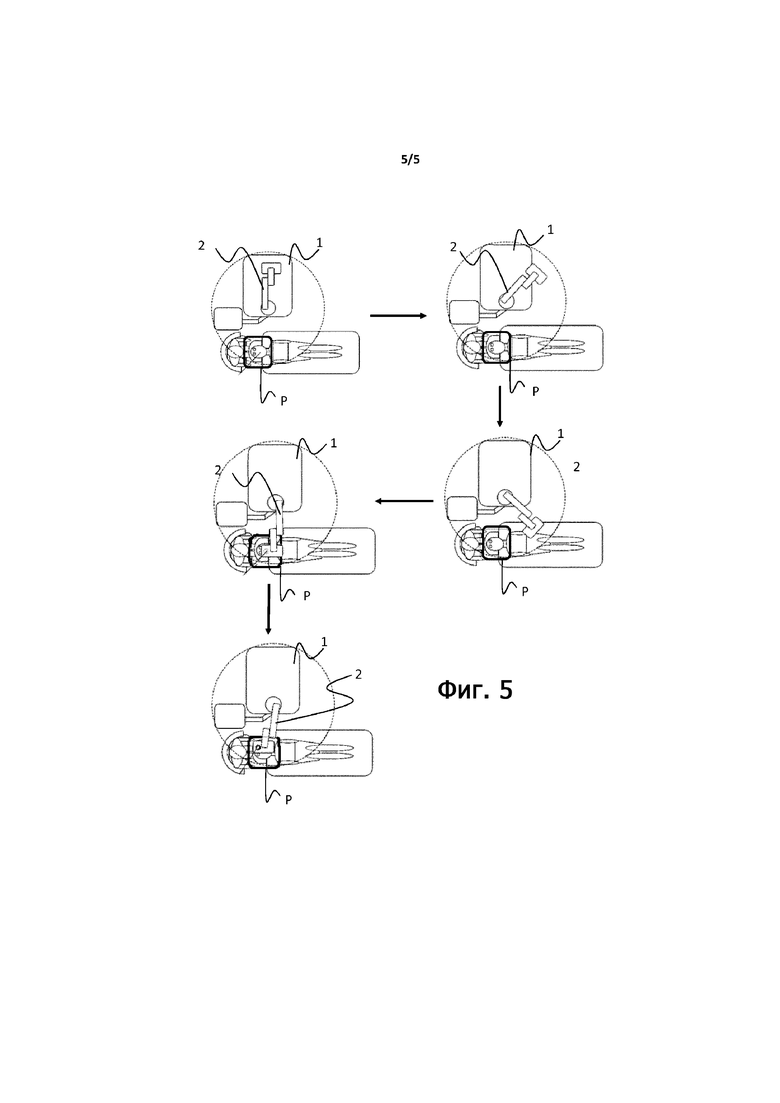
Фиг. 5 - этапы перемещения манипулятора в ходе процедуры лечения глазной патологии.
Подробное описание изобретения
Изобретение относится к устройству и способу контроля перемещения терапевтического аппарата для лечения человеческой или животной глазной ткани. В дальнейшем тексте описания изобретение будет представлено, в качестве примера, для разрезания глазной ткани, при этом, разумеется, настоящее изобретение можно применять для любого другого типа лечения глаз.
На фиг. 1 представлен пример терапевтического аппарата.
Терапевтический аппарат содержит:
- подвижный корпус 1,
- шарнирный манипулятор 2, установленный на корпусе 1,
- систему разрезания, установленную на манипуляторе 2,
- датчик 3 силы, установленный на свободном конце манипулятора 2,
- систему 4 сбора данных, установленную на манипуляторе 2 и предназначенную для получения изображений и сигналов, характеризующих расстояние между свободным концом манипулятора 2 и глазной тканью,
- устройство 5 контроля, встроенное в корпус 1, при этом устройство 5 контроля включает в себя средства управления и средства обработки.
1. Подвижный корпус
Корпус 1 обеспечивает перемещение терапевтического оборудования. В частности, он содержит колеса 11, металлическую раму и кожух, выполненный с минимальным количеством глухих полостей, чтобы избегать скапливания в них пыли и размножения патогенных элементов.
Предпочтительно корпус 1 содержит средства иммобилизации относительно пола, чтобы препятствовать его перемещению во время хирургического вмешательства.
На корпусе 1 установлены различные элементы терапевтического оборудования, такие как манипулятор 2 и устройство 5 контроля, и он содержит средства для их питания электрической энергией.
Кроме того, корпус 1 может содержать средства 12 визуальной индикации и ввода, такие как рабочая консоль, позволяющая врачу управлять терапевтическим оборудованием и/или следить за ходом лечения, применяемого к глазу пациента.
Наконец, корпус 1 может содержать средства 13 проводной или беспроводной связи для обмена данными с удаленным рабочим постом (не показан) или с устройством 5 контроля, если оно не встроено в корпус.
2. Манипулятор
Манипулятор 2 содержит несколько секций 21-24 манипулятора, соединенных шарнирами 25-27 (поворотными или шаровыми) для обеспечения поворотного перемещения различных секций 21-24 относительно друг друга.
Каждый шарнир 25-27 содержит механизированный привод и тормоз. Предпочтительно каждый тормоз является тормозом активного типа в случае отсутствия питания электрической энергией. Это позволяет предупреждать любое случайное движение манипулятора в случае отказа системы или отключения тока.
Механизированные приводы и тормоза шарниров манипулятора обеспечивают:
- автоматическое перемещение секций 21-24 манипулятора относительно корпуса 1, и
- иммобилизацию секций 21-24 манипулятора относительно корпуса 1.
В частности, манипулятор выполнен шарнирным для обеспечения перемещения свободного конца манипулятора по трем ортогональным осям Х, Y и Z:
- по оси Х, определяющей горизонтальное продольное направление,
- по оси Y, определяющей горизонтальное поперечное направление, которое вместе с осью Х образует горизонтальную плоскость XY,
- по оси Z, определяющей вертикальное направление, перпендикулярное к горизонтальной плоскости XY.
Свободный конец манипулятора 2 содержит элемент иммобилизации, оснащенный всасывающим кольцом, которое присасывается к глазной ткани и надежно удерживает ее на месте. Описанные ниже устройство и способ управления позволяют автоматически позиционировать элемент иммобилизации на предназначенной для лечения глазной ткани.
Как показано на фиг. 1 и 2, манипулятор 2 выполнен с возможностью перемещения между:
- убранным положением (фиг. 1), облегчающим его транспортировку из одной операционной в другую и/или внутри одной операционной, и
- исходным развернутым положением (фиг. 2) перед позиционированием его свободного конца на обрабатываемой глазной ткани.
Манипулятор 2 является, например, манипулятором TX260L, выпускаемым компанией STAUBLI.
Перемещение манипулятора 2 контролируется устройством 5 контроля, которое:
- определяет в каждый момент текущее положение в пространстве свободного конца манипулятора,
- генерирует команды перемещения с целью коррекции текущего положения его свободного конца, активируя один или несколько приводов для достижения определенного конечного положения, в котором элемент иммобилизации центрован и входит в контакт с глазной тканью,
- генерирует команды иммобилизации манипулятора, чтобы удерживать манипулятор неподвижным, активируя тормоза.
Предпочтительно манипулятор может содержать средства выключения для обеспечения его перемещения вручную, например, в случае отказа или отключения тока.
3. Система разрезания
На фиг. 3 представлен вариант выполнения системы разрезания, которую можно использовать с терапевтическим аппаратом в соответствии с изобретением. Система разрезания содержит:
- фемтосекундный лазер 100,
- систему 200 придания формы, такую как пространственный модулятор света на жидких кристаллах (или SLM - сокращение от английского “Spatial Light Modulator”), располагаемую на выходе фемтосекундного лазера 100,
- оптический соединитель 300 между фемтосекундным лазером 100 и системой 200 придания формы,
- оптический сканер 400 на выходе системы 200 придания формы,
- оптическую систему 500 фокусировки на выходе оптического сканера 400.
Устройство 5 контроля позволяет управлять системой 200 придания формы, оптическим сканером 400 и оптической системой 500 фокусировки.
Фемтосекундный лазер 100 выполнен с возможностью излучать исходный лазерный пучок в виде импульсов. Под «фемтосекундным лазером» следует понимать световой источник, выполненный с возможностью излучать лазерный пучок в виде ультракоротких импульсов, продолжительность которых составляет от 1 фемтосекунды до 100 пикосекунд, предпочтительно от 1 до 1000 фемтосекунд, в частности, порядка сотни фемтосекунд.
Система 200 придания формы расположена на траектории исходного лазерного пучка 110, выходящего из фемтосекундного лазера 100. Она позволяет трансформировать исходный лазерный пучок 100 в модулированный лазерный пучок 210. В частности, система придания формы позволяет модулировать фазу лазерного пучка 110 для распределения энергии лазерного пучка на множество точек облучения в его фокальной плоскости, причем это множество точек облучения образует рисунок. Иначе говоря, система 200 придания формы позволяет модулировать конечное распределение энергии лазерного пучка в плоскости 710 фокусировки, соответствующей плоскости разрезания ткани 700. Она выполнена с возможностью изменения пространственного профиля фронта волны первичного лазерного пучка 110, выходящего из фемтосекундного лазера 100, чтобы распределять энергию лазерного пучка на различные точки фокусировки в плоскости 710 фокусировки. Таким образом, исходя из гауссова лазерного пучка, создающего единственную точку облучения, при помощи фазовой маски система 200 придания формы позволяет распределять энергию пучка посредством фазовой модуляции, чтобы одновременно создавать несколько точек облучения в плоскости фокусировки, при помощи единого лазерного пучка, формируемого посредством фазовой модуляции (только один пучок на входе и на выходе модулятора SLM).
Оптический соединитель 300 позволяет передавать лазерный пучок 110, выходящий из фемтосекундного лазера 100, в систему 200 придания формы. Предпочтительно он содержит оптическое волокно, в частности, фотонно-кристаллическое волокно (или “PCF” сокращение от англосаксонского выражения “Photonic-Crystal Fiber”) с полой сердцевиной. Фотонно-кристаллическое волокно с полой сердцевиной является оптическим волокном, которое направляет свет в основном внутри полой области (сердцевины волокна) таким образом, чтобы только минимальная часть оптической мощности распространялась в твердом материале волокна (как правило, в стекле). Основным преимуществом фотонно-кристаллических волокон с полой сердцевиной является то, что первичное направление в полой области минимизирует нелинейные эффекты модулированного лазерного пучка и обеспечивает высокий порог повреждения. Предпочтительно в полой области фотонно-кристаллического волокна с полой сердцевиной можно создать вакуум, чтобы ограничить потери распространения лазерного пучка, выходящего из фемтосекундного лазера 100. Для этого оптический соединитель 300 содержит первый и второй соединительные элементы, герметично установленные на каждом конце фотонно-кристаллического волокна с полой сердцевиной. Эти соединительные элементы соединены с вакуумным насосом Р, встроенным в корпус 1, для создания вакуума в полой сердцевине оптического волокна посредством откачивания на уровне соединительных элементов. Вакуумное откачивание на каждом конце оптического волокна 31 облегчает создание вакуума в полой сердцевине по всей длине оптического волокна 31.
Оптический сканер 400 позволяет ориентировать модулированный лазерный пучок 210, чтобы пользователь мог перемещать рисунок вдоль заранее определенного пути перемещения в плоскости 710 фокусировки.
Оптическая система 500 фокусировки позволяет перемещать плоскость 710 фокусировки, соответствующую плоскости разрезания, отклоненного лазерного пучка 410, выходящего из оптического сканера 400.
Предпочтительно система 200 придания формы, оптический сканер 400 и система 500 фокусировки могут быть установлены в отсеке, закрепленном на конце 24 манипулятора, тогда как фемтосекундный лазер может быть встроен в корпус 1, при этом между корпусом 1 и концевой секцией 24 расположен оптический соединитель 300 для передачи исходного лазерного пучка 110 между фемтосекундным лазером 100 и системой 200 придания формы.
4. Датчик силы
Датчик 3 силы позволяет обнаруживать механические силы, возникающие в противодействие движению манипулятора 2, и эти силы свидетельствуют о присутствии препятствия и могут соответствовать установлению контакта между концом манипулятора 2 и глазной тканью. Датчик 3 силы может быть установлен на концевой секции 24 манипулятора 2.
Датчик 3 силы сам по себе известен специалисту в данной области. Он выполнен с возможностью обнаруживать и измерять силы сжатия и растяжения, действующие вдоль продольной оси концевой секции 24 манипулятора 2. Он содержит один или несколько тензометров, установленных на концевой секции 24 манипулятора 2.
Значение каждой механической силы, измеренное датчиком 3 силы, передается в устройство 5 контроля.
Если значение измеренной механической силы превышает пороговое значение, устройство контроля осуществляет одно или несколько заранее определенных действий (генерирование управляющего сигнала для иммобилизации манипулятора, команды на передачу визуального сигнала в средства 12 визуальной индикации и ввода и/или звукового сигнала на встроенный в корпус динамик, и т.д.).
5. Система сбора данных
Система 4 сбора данных позволяет получать пары измерений, используемые для контроля перемещения манипулятора 2 по отношению к обрабатываемой глазной ткани.
Каждая пара измерений включает в себя одно или несколько изображений зоны, находящейся напротив свободного конца манипулятора 2.
Для этого система 4 сбора данных может содержать блок съемки изображения типа ОКТ (оптическая когерентная томография) или технологии съемки по принципу Шаймпфлюга (картография в видимом свете), или УБМ (ультразвуковая биомикроскопия). Такой блок съемки изображения может быть установлен на концевой секции 24 манипулятора 2, например, на входе оптического сканера 400. Этот блок съемки изображения расположен таким образом, чтобы иметь достаточно широкое поле съемки (например, наблюдать периметр Р, соответствующий квадрату со стороной 50 см на расстоянии 30 см) и обеспечивать идентификацию глазной ткани в поле съемки. Предпочтительно блок съемки изображения может быть оснащен осветительными средствами (коаксиальными или нет) для облегчения распознавания глазной ткани.
Каждая пара измерений содержит также один или несколько сигналов, характеризующих расстояние между свободным концом манипулятора 2 и глазной тканью.
Для этого система 4 сбора данных может содержать блок лазерной телеметрии или блок ультразвуковой телеметрии, или блок телеметрии посредством анализа изображения, или любое другое эквивалентное устройство, известное специалисту в данной области и выполненное с возможностью считывать сигнал, характеризующий расстояние между свободным концом манипулятора 2 и объектом, находящимся напротив этого конца. Такой блок телеметрии можно тоже установить на концевой секции 24 манипулятора 2.
6. Устройство контроля
Устройство 5 контроля позволяет:
- обрабатывать пары измерений, поступающие из системы сбора данных, а также силы, измеренные датчиком 3 силы, и
- управлять различными элементами, входящими в состав терапевтического аппарата (манипулятор 2, система разрезания (в частности, фемтосекундный лазер 100, система 200 придания формы, сканер 400, оптическая система 500 фокусировки, вакуумный насос оптического соединителя 300 и т.д.), датчик 3 силы, система 4 сбора данных и т.д.).
Устройство 5 контроля соединено с этими различными элементами через одну или несколько шин связи, обеспечивающих передачу управляющих сигналов и получение собранных данных от датчика 3 силы, от системы 4 сбора данных и т.д.
Устройство 5 контроля может состоять из одного или нескольких рабочих постов и/или из одного или нескольких компьютеров. Устройство 5 контроля содержит процессор, запрограммированный для обеспечения управления различными элементами терапевтического аппарата с целью обработки сигналов, получаемых датчиком 3 силы и системой 4 сбора данных.
Устройство 5 контроля запрограммировано для осуществления способа, представленного на фиг. 4. Для этого устройство 5 контроля содержит:
- средства управления системой 4 сбора данных,
- средства обработки каждой пары измерений, полученной системой 4 сбора данных, и
- средства автоматического регулирования для генерирования управляющих сигналов перемещения и иммобилизации манипулятора 2.
Средства управления позволяют активировать систему 4 сбора данных для получения множества пар измерений последовательно во времени. В частности, после каждой передачи управляющего сигнала иммобилизации средствами автоматического регулирования, средства управления выдают сигнал активации от системы сбора данных для получения новой пары измерений. Средства обработки обрабатывают эту новую пару измерений, чтобы обновить отклонение между текущим положением конца манипулятора и его определенным конечным положением.
На основании каждой пары измерений средства обработки могут обнаружить трехмерное положение глазной ткани и трехмерное положение конца манипулятора.
Трехмерное положение свободного конца манипулятора известно по конструкции.
Трехмерное положение глазной ткани определяют посредством вычисления на основании пары измерений, поступающей от системы 4 сбора данных. Например, в изображении, полученном системой 4 сбора данных, средства обработки могут идентифицировать глазную ткань, ее двухмерное положение и ее центр, распознавая форму, близкую к типовой морфологии глаза (три концентричных окружности: белая окружность (склера), в центре которой находится цветная окружность (радужная оболочка), в центре которой находится черная окружность (зрачок)). Третью координату, необходимую для оценки трехмерного положения глазной ткани, выводят из сигнала, считываемого блоком телеметрии, и этот сигнал характеризует расстояние между свободным концом манипулятора и глазной тканью.
Для обработки каждой пары измерений, полученной от системы 4 сбора данных, средства обработки содержат:
- средства оценки, на основании текущей пары измерений, вертикального расстояния вдоль оси Z между концом манипулятора и глазной тканью,
- средства вычисления, на основании изображения текущей пары измерений, горизонтального отклонения между:
- текущим горизонтальным положением свободного конца манипулятора в горизонтальной плоскости XY, и
- определенным конечным горизонтальным положением свободного конца манипулятора в горизонтальной плоскости XY.
Средства автоматического регулирования запрограммированы для применения контура автоматического регулирования в плоскости XY и контура автоматического регулирования в направлении Z.
Предпочтительно перемещение свободного конца манипулятора 2 вдоль осей XY не связано с его перемещением вдоль оси Z. В частности, устройство управления запрограммировано таким образом, чтобы:
- на первом этапе перемещать свободный конец манипулятора 2 в горизонтальной плоскости XY для позиционирования указанного свободного конца в определенное конечное горизонтальное положение, не допуская любого перемещения свободного конца вдоль оси Z (то есть, не приближая свободный конец манипулятора к глазной ткани),
- на втором этапе перемещать свободный конец манипулятора 2 вдоль вертикальной оси Z, чтобы приблизить его к глазной ткани вплоть до установления контакта, не допуская при этом любого перемещения свободного конца в горизонтальной плоскости XY.
Это позволяет избежать любого риска травмы пациента (например, от трения между свободным концом манипулятора и глазом пациента, если задано перемещение в плоскости XY, когда конец уже входит в контакт с глазной тканью).
Средства автоматического регулирования устройства 5 контроля выполнены с возможностью генерировать множество последовательных управляющих сигналов перемещения, чтобы перемещать свободный конец манипулятора из исходного развернутого положения в определенное конечное положение, в котором элемент иммобилизации оказывается центрованным и входит в контакт с предназначенной для лечения глазной тканью.
В частности, если расстояние между текущим положением конца манипулятора 2 и определенным конечным положением превышает пороговое значение, средства автоматического регулирования генерируют множество последовательных управляющих сигналов элементарного перемещения, чтобы привести конец манипулятора в искомое конечное положение.
Между каждой передачей управляющего сигнала элементарного перемещения средства автоматического регулирования генерируют управляющий сигнал иммобилизации, и средства управления передают сигнал активации из системы 4 сбора данных для получения новой пары измерений. Это позволяет проверять в ходе всего перемещения манипулятора 2, что его конец приближается к искомому конечному положению, и учитывать возможное случайное движение головы пациента (в этом случае искомое конечное положение следует обновить).
7. Принцип работы
Далее со ссылками на фиг. 4 и 5 следует более подробное описание принципа работы терапевтического оборудования.
7.1. Перед использованием терапевтического аппарата
В качестве предварительного условия нормальной работы описанного выше терапевтического аппарата следует уточнить, что в каждом месте, где будет использоваться этот аппарат, необходимо определить положение хирургического оборудования в операционной с разметкой на полу, и это положение определяют в зависимости от:
- предпочтений хирурга (положение справа или слева, спереди, сбоку или сзади, близко или на удалении),
- обычного конечного положения кровати, на которой лежит пациент,
- формы кровати, ее размеров, ее высоты,
- соблюдения условия расстояния таким образом, чтобы конечное положение головы пациента находилось в периметре, центрованном вокруг точки крепления роботизированного манипулятора на хирургическом оборудовании и символизирующем его радиус действия или расстояние, сверх которого манипулятор не сможет достичь цели.
После осуществления разметки на полу терапевтический аппарат будет располагаться в одном и том же месте при каждом использовании. Таким образом, относительное положение каждого пациента относительно машины и, в частности, его головы и его глаз, известно с допустимым запасом погрешности, который может достигать 20 сантиметров.
Таким образом, посредством параметрирования, производимого через интерфейс человек-машина, можно определить координаты периметра Р, соответствующего квадрату со стороной 50 см, в котором будет находиться голова пациента для глазной терапии при помощи заявленной системы (периметр Р достоверного присутствия цели). После сохранения в памяти координат этого периметра Р при каждом использовании устройство 5 контроля управляет позиционированием конца манипулятора (по умолчанию и перед действиями, необходимыми для получения идеальной центровки) в центре периметра Р. Это положение соответствует исходному развернутому положению.
Центровку и установление контакта элемента иммобилизации с глазной тканью производят следующим образом.
7.2. Автоматическое позиционирование свободного конца манипулятора на глазной ткани
7.2.1. Развертывание манипулятора
Когда пациент занимает свое место и терапевтический аппарат находится на своем месте, устройство 5 контроля подает команду на развертывание манипулятора (этап 801).
Манипулятор 2 перемещается автоматически (что показано четырьмя первыми этапами на фиг. 5), чтобы расположить свободный конец манипулятора 2 в центре периметра Р (исходное развернутое положение).
После достижения центра периметра Р запускают итерации контура автоматического регулирования XY.
7.2.2. Контур автоматического регулирования по XY
Контур автоматического регулирования по XY имеет запрограммированную функцию, которая при каждой итерации:
- получает изображение,
- анализирует его,
- идентифицирует координаты XY искомого конечного горизонтального положения,
- определяет координаты X’, Y’ текущего горизонтального положения свободного конца манипулятора 2, и
- вычисляет отклонение между текущим горизонтальным положением и искомым конечным горизонтальным положением,
- вычисляет оставшуюся траекторию между текущим горизонтальным положением и искомым конечным горизонтальным положением,
- передает на манипулятор 2 один или более управляющих сигналов перемещения, чтобы привести манипулятор 2 в движение вдоль вычисленной траектории до момента, когда анализ полученного изображения позволяет определить, что искомое конечное горизонтальное положение достигнуто (X=X’ и Y=Y’): свободный конец манипулятора 2 оказывается при этом совмещенным с вертикальной осью, проходящей через центр глазной ткани.
В частности, средства управления устройства 5 контроля выдают сигнал активации системы 4 сбора данных. Система 4 сбора данных получает изображение и сигнал, характеризующий расстояние между концом манипулятора и глазной тканью.
Средства обработки получают пару измерений, полученную системой 4 сбора данных, и производят их обработку (этап 803).
В частности, средства обработки:
- обнаруживают в полученном изображении глазную ткань,
- определяют положение центра глазной ткани,
- определяют это положение центра глазной ткани как соответствующее искомому конечному горизонтальному положению,
- оценивают текущее горизонтальное положение конца манипулятора, и
- сравнивают (этап 804) текущее горизонтальное положение с искомым конечным горизонтальным положением (например, вычисляя расстояние между текущим горизонтальным положением и искомым конечным горизонтальным положением).
Результат этого сравнения поступает в средства автоматического регулирования, которые:
- подают команду на применение контура автоматического регулирования по Z, если текущее горизонтальное положение совпадает с искомым конечным горизонтальным положением,
- в противном случае генерируют управляющий сигнал для горизонтального перемещения манипулятора 2 (этап 805).
После перемещения манипулятора 2 в соответствии с управляющим сигналом перемещения средства автоматического регулирования генерируют управляющий сигнал для иммобилизации (этап 806) манипулятора 2, и предыдущие этапы повторяются, пока свободный конец манипулятора 2 не придет в искомое конечное горизонтальное положение по XY.
7.2.3. Контур автоматического регулирования по Z
После того как свободный конец манипулятора 2 оказывается по XY совмещенным с искомым конечным горизонтальным положением, можно применить контур автоматического регулирования по Z.
Контур автоматического регулирования по Z представляет собой запрограммированную функцию, которая при каждой итерации:
- получает данные текущей высоты расположения конца манипулятора 2 по отношению к глазной ткани (текущее положение Z’ - искомое положение Z),
- вычисляет отклонение между текущим вертикальным положением конца манипулятора и искомым конечным вертикальным положением,
- передает на манипулятор 2 один или более управляющих сигналов перемещения, чтобы привести манипулятор 2 в движение вдоль оси Z, не меняя при этом положения XY, вдоль вычисленной траектории вплоть до момента, когда датчик 3 силы обнаружит контакт, соответствующий тому, что достигнуто искомое конечное вертикальное положение (Z’=Z): свободный конец манипулятора 2 входит при этом в контакт с глазной тканью.
В частности, средства обработки устройства 5 контроля обрабатывают сигнал, характеризующий вертикальное расстояние вдоль оси Z (этап 803), и сравнивают (этап 807) текущее вертикальное положение с искомым конечным вертикальным положением.
Результат этого сравнения передается в средства автоматического регулирования, которые получают также сигнал, измеренный датчиком 3 силы. Средства автоматического регулирования:
- генерируют управляющий сигнал иммобилизации манипулятора 2, если текущее вертикальное положение совпадает с искомым конечным вертикальным положением (этап 810),
- в противном случае генерируют управляющий сигнал вертикального перемещения манипулятора 1 (этап 808).
После перемещения манипулятора 2 в соответствии с управляющим сигналом вертикального перемещения средства автоматического регулирования генерируют управляющий сигнал иммобилизации (этап 809), и предыдущие этапы повторяются, в том числе этапы работы контура автоматического регулирования по XY, чтобы проверить, что текущее горизонтальное положение по-прежнему соответствует искомому конечному горизонтальному положению.
Это позволяет учитывать возможные движения пациента в ходе процедуры позиционирования манипулятора 2.
Устройство 5 контроля позволяет позиционировать свободный конец манипулятора точно и с правильной центровкой. На этом свободном конце установлены различные рабочие компоненты, позволяющие производить лечение глазной ткани.
Для большей уверенности врача последовательность различных этапов, представленных на фиг. 4, можно контролировать при помощи педали управления и/или голосовой команды и/или при помощи интерфейса человек-машина сенсорного или иного типа.
8. Выводы
Описанное выше изобретение позволяет всего за несколько секунд автоматически позиционировать на глазу пациента элемент иммобилизации глазного яблока без вмешательства человека, быстро, точно и воспроизводимым образом. Его эффективность не зависит от окружающей среды, что позволяет выиграть в точности, сделать действие воспроизводимым, каким бы ни был пациент или оператор, и получить экономию во времени, облегчая оператору работу при незначительных затратах.
Кроме того, изобретение позволяет добиться большего уровня безопасности и, следовательно, уменьшить риск для пациента во время вмешательства.
Понятно, что в описанное выше изобретение можно вносить многие изменения, не выходя материально за рамки описанных в данном случае новых сведений и преимуществ. Например, в представленном описании элемент иммобилизации установлен на свободном конце роботизированного манипулятора. В варианте элемент иммобилизации может быть отделен от роботизированного манипулятора. В этом случае элемент иммобилизации позиционируют на глазу пациента до перемещения роботизированного манипулятора, и искомое конечное положение соответствует установлению контакта свободного конца роботизированного манипулятора со стороной элемента иммобилизации, противоположной поверхности элемента иммобилизации, входящей в контакт с глазом. Следовательно, все изменения этого типа должны быть включены в объем прилагаемой формулы изобретения.
Изобретение относится к медицине, а именно к устройствам для контроля перемещения аппарата глазной терапии. Аппарат глазной терапии содержит шарнирный манипулятор и систему сбора данных, установленную на манипуляторе. Свободный конец манипулятора предназначен для размещения напротив глазной ткани человека или животного. Система сбора данных предназначена для получения пары измерений, включающей в себя: изображение глазной ткани и сигнал, характеризующий вертикальное расстояние между концом манипулятора и глазной тканью. Устройство контроля содержит: средства для управления системой сбора данных для получения пар измерений последовательно во времени; средства для обработки каждой пары измерений; средства автоматического регулирования для перемещения свободного конца манипулятора между исходным положением и определенным конечным положением. Достигается возможность автоматизировать фазу установки на место элемента иммобилизации глазного яблока. 2 н. и 10 з.п. ф-лы, 5 ил.
1. Устройство (5) для контроля перемещения аппарата глазной терапии, содержащего:
- манипулятор (2), при этом свободный конец манипулятора (2) предназначен для размещения напротив глазной ткани человека или животного, указанный манипулятор (2) является шарнирным для обеспечения перемещения свободного конца манипулятора (2) по трем попарно ортогональным осям Х, Y и Z:
по оси Х, определяющей горизонтальное продольное направление,
по оси Y, определяющей горизонтальное поперечное направление, которое вместе с осью Х образует горизонтальную плоскость XY,
по оси Z, определяющей вертикальное направление, перпендикулярное к горизонтальной плоскости XY,
- систему (4) сбора данных, установленную на манипуляторе (2) и предназначенную для получения пары измерений, включающей в себя:
изображение глазной ткани и
сигнал, характеризующий вертикальное расстояние вдоль оси Z между концом манипулятора (2) и глазной тканью,
характеризующееся тем, что устройство (5) контроля содержит:
- средства для управления системой (4) сбора данных для получения пар измерений последовательно во времени,
- средства для обработки каждой пары измерений, при этом указанные средства обработки включают в себя:
средства оценки, на основании текущей пары измерений, вертикального расстояния вдоль оси Z между концом манипулятора и глазной тканью,
средства вычисления, на основании изображения текущей пары измерений, горизонтального отклонения между:
текущим горизонтальным положением свободного конца манипулятора в горизонтальной плоскости XY, и
определенным конечным горизонтальным положением свободного конца манипулятора в горизонтальной плоскости XY,
средства автоматического регулирования, выполненные с возможностью:
если вычисленное горизонтальное отклонение превышает первое пороговое значение, генерировать управляющий сигнал для горизонтального перемещения манипулятора (2) в горизонтальной плоскости XY, чтобы уменьшить отклонение между текущим горизонтальным положением и определенным конечным горизонтальным положением,
если вычисленное горизонтальное отклонение меньше первого порогового значения и если оцененное вертикальное расстояние превышает второе пороговое значение, генерировать управляющий сигнал для вертикального перемещения манипулятора (2) в вертикальном направлении, чтобы уменьшить расстояние между свободным концом манипулятора и глазной тканью,
если вычисленное горизонтальное отклонение меньше первого порогового значения и если измеренное вертикальное расстояние меньше второго порогового значения, генерировать управляющий сигнал для приведения манипулятора в неподвижное состояние.
2. Устройство контроля по п. 1, в котором средства вычисления содержат:
- средства для обнаружения, на основании изображения текущей пары измерений, горизонтального положения по меньшей мере одной интересующей точки глазной ткани,
- средства для оценки, на основании обнаруженного горизонтального положения интересующей точки, горизонтального отклонения между:
текущим горизонтальным положением свободного конца манипулятора в горизонтальной плоскости XY и
определенным конечным горизонтальным положением свободного конца манипулятора в горизонтальной плоскости XY.
3. Устройство контроля по п. 2, в котором средства обнаружения выполнены с возможностью идентифицировать глазную ткань в полученном изображении посредством применения алгоритма распознавания формы для обнаружения трех концентричных окружностей на изображении.
4. Устройство контроля по любому из пп. 1-3, в котором терапевтический аппарат дополнительно содержит датчик (3) силы, установленный на свободном конце манипулятора для измерения механической силы, прикладываемой к свободному концу манипулятора:
- при этом средства обработки содержат средства сравнения указанной измеренной механической силы с третьим пороговым значением, чтобы определить, входит ли свободный конец манипулятора в контакт с элементом, образующим препятствие для вертикального перемещения манипулятора вдоль оси Z,
- указанные средства автоматического регулирования запрограммированы таким образом, чтобы генерировать управляющий сигнал для приведения манипулятора в неподвижное состояние, если измеренная механическая сила превышает третье пороговое значение.
5. Устройство контроля по любому из пп. 1-4, в котором для получения сигнала, характеризующего вертикальное расстояние вдоль оси Z, система сбора данных содержит:
- средства для получения данных посредством лазерной телеметрии, и/или
- средства для получения данных при помощи ультразвука,
- средства для получения данных посредством обработки изображения.
6. Устройство контроля по любому из предыдущих пунктов, в котором средства автоматического регулирования запрограммированы таким образом, чтобы генерировать управляющие сигналы элементарного перемещения для обеспечения перемещения манипулятора между его текущим положением и определенным конечным положением, при этом указанные средства автоматического регулирования генерируют управляющий сигнал приведения в неподвижное состояние вслед за каждым управляющим сигналом элементарного перемещения.
7. Способ контроля перемещения аппарата глазной терапии, содержащего:
- манипулятор (2), при этом свободный конец манипулятора (2) предназначен для размещения напротив глазной ткани человека или животного, указанный манипулятор (2) является шарнирным для обеспечения перемещения свободного конца манипулятора (2) по трем попарно ортогональным осям Х, Y и Z:
по оси Х, определяющей горизонтальное продольное направление,
по оси Y, определяющей горизонтальное поперечное направление, которое вместе с осью Х образует горизонтальную плоскость XY,
по оси Z, определяющей вертикальное направление, перпендикулярное к горизонтальной плоскости XY,
- систему (4) сбора данных, установленную на манипуляторе (2) и предназначенную для получения пары измерений, включающей в себя:
изображение глазной ткани и
сигнал, характеризующий вертикальное расстояние вдоль оси Z между концом манипулятора и глазной тканью,
характеризующийся тем, что способ контроля содержит следующие фазы, на которых:
- получают (802) пары измерений последовательно во времени при помощи системы сбора данных,
- обрабатывают (803) каждую пару измерений, при этом фаза обработки содержит этапы, на которых:
оценивают вертикальное расстояние вдоль оси Z между концом манипулятора и глазной тканью на основании текущей пары измерений,
на основании изображения из текущей пары измерений вычисляют горизонтальное отклонение между:
текущим горизонтальным положением свободного конца манипулятора в горизонтальной плоскости XY и
определенным конечным горизонтальным положением свободного конца манипулятора в горизонтальной плоскости XY,
- производят автоматическое регулирование перемещения манипулятора (2), при этом:
если вычисленное горизонтальное отклонение превышает первое пороговое значение, генерируют (805) управляющий сигнал для горизонтального перемещения манипулятора (2) в горизонтальной плоскости XY, чтобы уменьшить отклонение между текущим горизонтальным положением и указанным определенным конечным горизонтальным положением,
если вычисленное горизонтальное отклонение меньше первого порогового значения и если оцененное вертикальное расстояние превышает второе пороговое значение, генерируют (808) управляющий сигнал для вертикального перемещения манипулятора (2) в вертикальном направлении, чтобы уменьшить расстояние между свободным концом манипулятора и глазной тканью,
если вычисленное горизонтальное отклонение меньше первого порогового значения и если измеренное вертикальное расстояние меньше второго порогового значения, генерируют (810) управляющий сигнал для приведения манипулятора в неподвижное состояние.
8. Способ контроля по п. 7, в котором этап вычисления содержит подэтапы, на которых:
- на основании изображения из текущей пары измерений обнаруживают горизонтальное положение по меньшей мере одной интересующей точки глазной ткани,
- на основании обнаруженного горизонтального положения интересующей точки оценивают горизонтальное отклонение между:
текущим горизонтальным положением свободного конца манипулятора в горизонтальной плоскости XY и
указанным определенным конечным горизонтальным положением свободного конца манипулятора в горизонтальной плоскости XY.
9. Способ контроля по п. 8, в котором на подэтапе обнаружения идентифицируют глазную ткань в полученном изображении посредством применения алгоритма распознавания формы для обнаружения трех концентричных окружностей на изображении.
10. Способ контроля по любому из пп. 7-9, в котором терапевтический аппарат дополнительно содержит датчик (3) силы, установленный на свободном конце манипулятора (2) для измерения механической силы, прикладываемой к свободному концу манипулятора:
- при этом фаза обработки содержит этап сравнения указанной измеренной механической силы с третьим пороговым значением, чтобы определить, входит ли свободный конец манипулятора в контакт с элементом, образующим препятствие для вертикального перемещения манипулятора вдоль оси Z,
- на этапе автоматического регулирования генерируют управляющий сигнал для приведения манипулятора в неподвижное состояние, если измеренная механическая сила превышает третье пороговое значение.
11. Способ контроля по любому из пп. 7-10, в котором на фазе получения данных:
- получают данные сигнала, характеризующего вертикальное расстояние вдоль оси Z, посредством лазерной телеметрии, и/или
- получают данные сигнала, характеризующего вертикальное расстояние вдоль оси Z, посредством ультразвука, и/или
- выделяют полученное изображение из сигнала, характеризующего вертикальное расстояние вдоль оси Z.
12. Способ контроля по любому из пп. 7-11, в котором на этапе автоматического регулирования:
- генерируют управляющий сигнал элементарного перемещения для перемещения манипулятора между его текущим положением и определенным конечным положением,
- генерируют управляющий сигнал приведения в неподвижное состояние вслед за каждым управляющим сигналом элементарного перемещения,
- повторяют предыдущие подэтапы, пока вычисленное горизонтальное отклонение не станет меньше первого порогового значения и пока измеренное вертикальное расстояние не станет меньше второго порогового значения.
| EP 3266403 A1, 10.01.2018 | |||
| УСТРОЙСТВО ДЛЯ УВЛАЖНЕНИЯ ГЛАЗА ВО ВРЕМЯ МИКРОХИРУРГИЧЕСКОЙ ОПЕРАЦИИ | 2004 |
|
RU2271784C1 |
| WO 2017182342 A1, 26.10.2017 | |||
| US 2011304819 A1, 15.12.2011 | |||
| US 2017143429 A1, 25.05.2017. | |||

