Уровень техники
Изобретение относится к способу регулировки работы гидравлической стрелы, содержащей, по меньшей мере, две подвижные друг относительно друга соединенные секции стрелы, которые подвижно соединены для вращения вокруг оси относительно друг друга или для прямолинейного перемещения с помощью гидропривода,
устройства управления гидроприводами,
датчика определения перемещения и положения между секциями стрелы,
причем каждое перемещение управляется шарнирным контроллером, входящим в состав устройств управления, и для регулировки работы стрелы можно настроить параметр регулировки конкретного перемещения шарнирного контроллера в устройствах управления для каждого конкретного перемещения.
Кроме того, изобретение дополнительно относится к устройству для регулировки работы гидравлической стрелы, содержащей, по меньшей мере, две подвижные друг относительно друга соединенные секции стрелы, которые подвижно соединены для вращения вокруг оси относительно друг друга или для прямолинейного перемещения с помощью гидропривода, устройства управления гидроприводами, датчик определения перемещения и положения между секциями стрелы, причем каждое перемещение управляется шарнирным контроллером, входящим в состав устройств управления, при этом для регулировки работы стрелы можно настроить параметр регулировки конкретного перемещения шарнирного контроллера в устройствах управления для каждого конкретного перемещения.
Более того, изобретение дополнительно включает в себя компьютерную программу для контроля блока обработки, входящего в состав устройства, регулирующего работу гидравлической стрелы, содержащей, по меньшей мере, две подвижные друг относительно друга соединенные секции стрелы, которые подвижно соединены для вращения вокруг оси относительно друг друга или для прямолинейного перемещения с помощью гидропривода, устройства управления гидроприводами, датчик определения перемещения и положения между секциями стрелы, причем каждое перемещение управляется шарнирным контроллером, входящим в состав устройств управления, при этом для регулировки работы стрелы можно настроить параметр регулировки конкретного перемещения шарнирного контроллера в устройствах управления для каждого конкретного перемещения.
Многошарнирные гидравлические стрелы используются в различных устройствах. Гидравлические стрелы являются манипуляторами типа "разомкнутой кинематической схемы", которые состоят более чем из одного последовательного звена, связанных шарнирным манипулятором. Шарниры могут быть вращаемыми поворотными шарнирами или призматическими шарнирами, в которых взаимное перемещение шарнирных рычагов является линейным, т.е. по прямой линии. Для достижения декартовых координат конца стрелы шарнирные углы шарниров стрелы следует доводить путем регулировки значений, вычисленных посредством инверсной кинематики. Информацию о положении шарниров получают посредством датчиков, и при регулировке каждого шарнира полученные таким образом координаты применяют для шарнирного контроллера, регулируя положение соответствующего шарнира. Как правило, шарнирный контроллер представляет собой устройство цифрового процессора, управляющее приводом, изменяющим координаты шарниров так, что величина разности желаемых координат шарниров и фактических координат, измеренных датчиком, стремилась быть как можно ближе к нулю.
Задачей настройки стрелы является то, чтобы приспособление, располагающееся на конце стрелы, с достаточной точностью находилось в желаемом положении. С другой стороны, задачей также является наибольшее улучшение динамических характеристик перемещения стрелы. Хорошие динамические характеристики относятся к скорости позиционирования шарниров и, таким образом, всей стрелы в желаемое положение и к минимальной величине колебаний в приводах и в настраиваемых шарнирах.
В случае гидравлических стрел настройка параметров шарнирного контроллера является сложной задачей, осуществляемой с помощью программного обеспечения или с помощью составленного контрольного оборудования так, чтобы применяемый алгоритм регулировки мог заставить вести стрелу желаемым образом, т.е. осуществлять изменения заданной величины настолько безошибочно, насколько возможно. Вследствие сложной, трудно моделируемой динамики гидравлической стрелы настраивать устройства регулировки сложно. Кроме того, настройка параметров шарнирных контроллеров является сложной задачей вследствие того, что гидравлические стрелы характеризуются структурной гибкостью и упругостью. Оптимальная настройка шарнирных контроллеров значительно отличается от случая с одной степенью свободы, когда необходимо, чтобы шарниры двигались одновременно. Применить общие способы настройки к шарнирам стрелы многошарнирных манипуляторов сложно, если вообще возможно. Организация контроля и регулировки стрелы дополнительно осложняется тем, что пока регулируется один шарнир, меняются ускорение и координаты остальных шарниров, кроме того, изменения в моменте инерции шарнирных манипуляторов стрелы относительно настраиваемых шарниров влияют на характеристики регулировки регулируемого шарнира.
Альтернативой экспериментальной настройке устройства регулировки является создание точной математической модели системы для регулировки и настройка шарнирных контроллеров на основе этой модели. Однако это создает проблему того, что созданная модель будет точно описывать только одну конкретную стрелу, и модель каждой стрелы следует создавать отдельно. На практике это экономически необоснованно, если доступно более простое экспериментальное решение.
В настоящее время контроль регулировки стрелы настраивают путем выполнения вычислений приближенных значений различных параметров для случая с одной степенью свободы, затем параметры шарнирного контроллера настраиваются от шарнира к шарниру методом проб и ошибок до достижения желаемого поведения. Если в механизмах настройки недостаточно информации о способах регулировки, на практике может быть невозможно загрузить числовые значения, служащие в качестве параметров шарнирного контроллера. В итоге, если не будет подходящего способа и показателей для оценки конечного результата, конечный результат настройки будет основан только на визуальной оценке.
Краткое описание изобретения
Задачей изобретения является создание способа и устройства для регулировки работы гидравлической стрелы, которые являются более простыми и легкими, чем в известной области, и которые можно применять для различных стрел независимо от числа и типа шарниров.
Способ согласно изобретению характеризуется тем, что осуществляют контроль взаимного перемещения секций стрелы относительно заданного положения секций стрелы по обе его стороны симметричным и повторяемым контрольным сигналом; сравнивают фактические значения координат и скорости движения, полученные от датчика в ответ на контрольный сигнал, с теоретическими значениями координат и скорости движения, определенными на основе контрольного сигнала; и регулируют параметры регулировки шарнирного контроллера на основе разностей значений до достижения разностью фактических значений координат и скорости движения, полученных от датчика, и теоретических значений координат и скорости движения, определенных на основе контрольного сигнала, желаемой величины.
Устройство согласно изобретению характеризуется тем, что оно выполнено с возможностью контроля взаимного перемещения секций стрелы относительно заданного положения секций стрелы по обе его стороны симметричным контрольным сигналом, причем устройства управления включают в себя устройства для сравнения фактических значений координат и скорости движения, полученных от датчика в ответ на контрольный сигнал, с теоретическими значениями координат и скорости движения, определенными на основе контрольного сигнала, и устройства для регулировки параметров регулировки шарнирного контроллера на основе разностей значений до достижения разностью фактических значений координат и скорости движения, полученных от датчика, и теоретических значений координат и скорости движения, определенных на основе контрольного сигнала, желаемой величины.
Компьютерная программа согласно изобретению характеризуется тем, что она содержит программный код для контроля взаимного перемещения секций стрелы относительно предопределенного положения секций стрелы по обе его стороны симметричным контрольным сигналом, для сравнения фактических значений координат и скорости движения, полученных с датчика в ответ на контрольный сигнал, с теоретическими значениями координат и скорости движения, определенными на основе контрольного сигнала, и для регулировки параметров регулировки шарнирного контроллера на основе разностей значений до достижения разностью фактических значений координат и скорости движения, полученных от датчика, и теоретических значений координат и скорости движения, определенных на основе контрольного сигнала, желаемой величины.
Основная идея изобретения заключается в подаче симметричного, желательно синусоидального, сигнала управления с обеих сторон начальной позиции, т.е. с нулевой позиции, служащего в качестве заданного значения регулируемого шарнирного контроллера перемещения секции стрелы, тем самым приводя секции стрелы в возвратно-поступательное движение и в то же время измеряя их взаимное положение посредством углового или координатного датчика. Кроме того, основная идея варианта осуществления состоит в том, что координаты и скорость перемещения представляются на устройстве отображения в системе координат местоположения и скорости, что приводит, по существу, к эллиптическому профилю. Другая идея заключается в том, что профиль, получаемый посредством заданного значения и скорости движения, сравнивают с профилем, получаемым на основе измеренных текущих значений координат и скорости движения шарнира в системе координат местоположения и скорости, и на основе расхождения изменяют параметр регулировки шарнирного контроллера, например коэффициент усиления. Настройка завершается, когда измеренный полученный профиль с достаточной точностью соответствует профилю заданного значения.
Краткое описание чертежей
Изобретение будет более подробно описано со ссылкой на прилагаемые чертежи, на которых:
фиг. 1a и 1b - схематичные виды сбоку и сверху гидравлической стрелы соответственно;
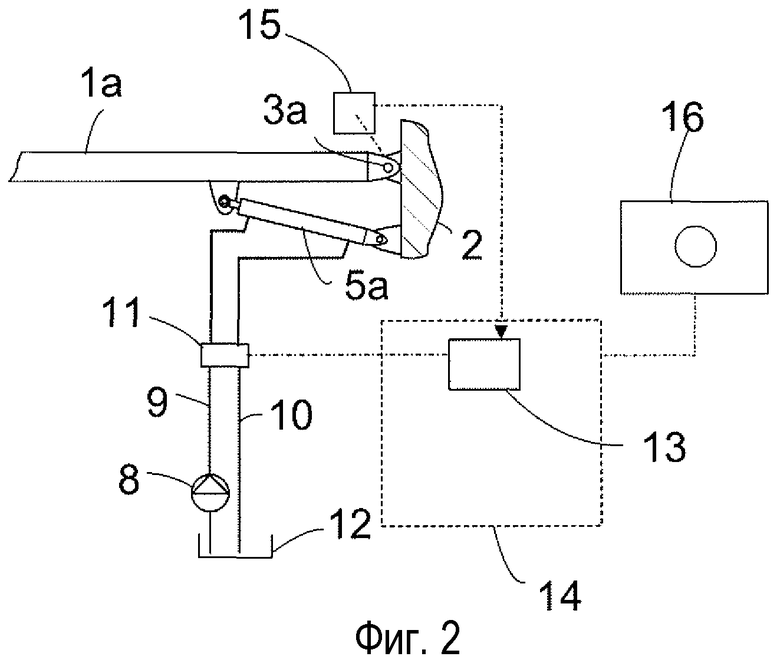
фиг. 2 - схематичный вид сцепления устройств управления для настройки работы стрелы;
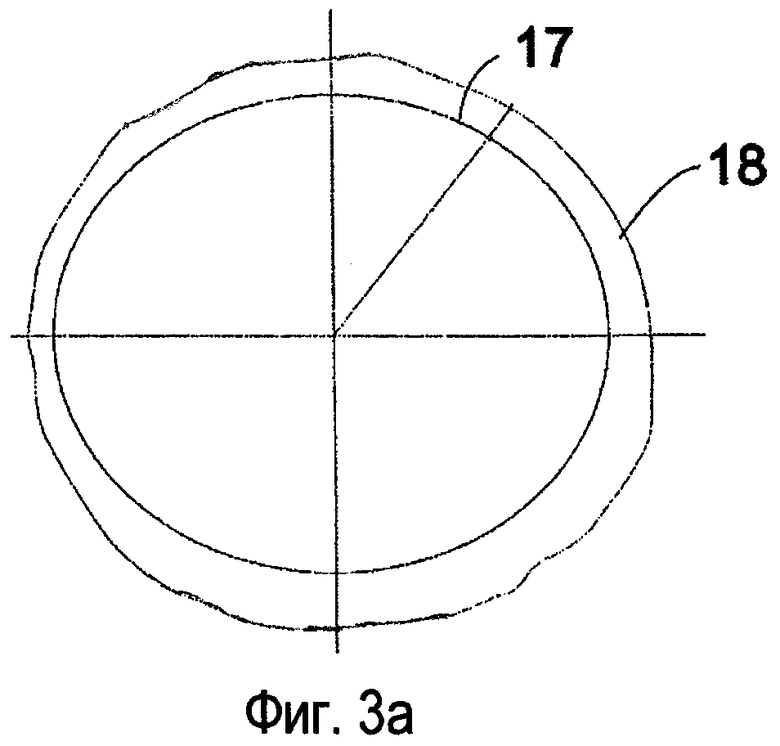
фиг. 3a-3c - схематическая иллюстрация возможной индикации пользовательского интерфейса при настройке шарнирного контроллера одной стрелы; и
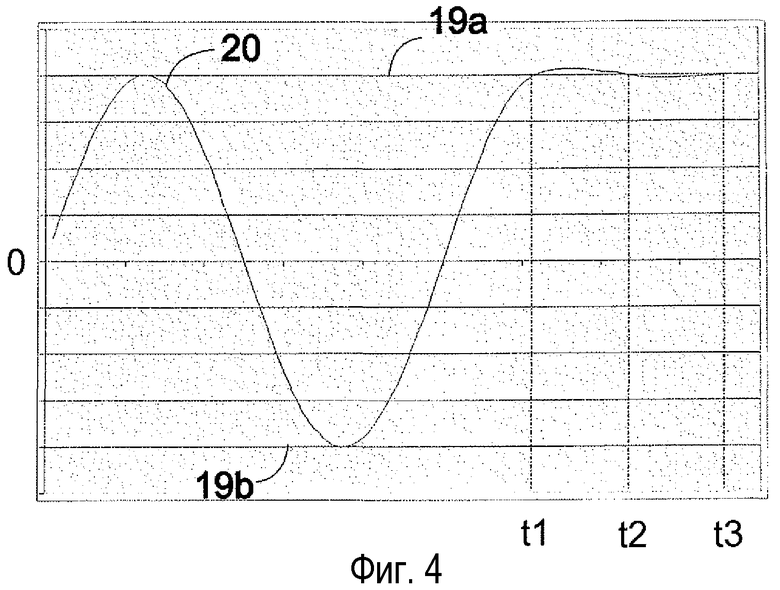
фиг. 4 - схематичное измерение точности размещения стрелы.
Подробное описание некоторых вариантов осуществления изобретения
На фиг. 1a и 1b соответственно показаны схематические виды сбоку и сверху гидравлической стрелы 1, которая представляет собой, например, стрелу буровой установки для бурения по коренным породам с множеством секций 1a и 1b стрелы. Секции 1a и 1b стрелы соединены друг с другом, а с другой стороны соединены со схематически показанным держателем 2 с помощью шарнира 3a, и на конце наиболее дальней секции 1b стрелы находится приспособление 4, которое соединено с ней шарниром 3b. Позиционирование приспособления 4 осуществляется поворотом секций 1a и 1b стрелы относительно держателя 2 и относительно друг друга и посредством вращения приспособления относительно секции 1b стрелы. Стрела управляется приводами 5a и 5b, воздействующими на держатель и на шарниры 3a-3c секций стрелы. На фиг. 1b соответственно показаны шарниры 6a-6c, чьи оси перпендикулярны осям шарниров 3a и 3b и вокруг которых секции стрелы поворачиваются относительно носителя и относительно друг друга приводами 7a-7с.
На фиг. 2 схематически показано сцепление для контроля стрелы относительно шарнира 3a. Оно включает в себя секцию 1a стрелы, которая соединена с помощью шарнира 3a с держателем 2. Между держателем 2 и секцией 1a стрелы находится гидравлический привод 5a, который служит в качестве примера гидравлического цилиндра. Насос 8 подает гидравлическую рабочую жидкость в гидравлический цилиндр через каналы 9 и 10 рабочей жидкости через контрольные клапаны 11 и, соответственно, возвращает ее в контейнер 12 рабочей жидкости. Контрольные клапаны 11 для их контроля соединены с шарнирным контроллером 13, а шарнирный контроллер 13, который схематически показан как часть блока 14 управления, управляется блоком 14 управления. Шарнир 3a включает в себя угловой датчик 15, который определяет угол поворота между секцией 1a стрелы и держателем и который, как показано пунктирной линией, соединен с шарнирным контроллером 13, а также, необязательно, с блоком 14 управления для определения угла поворота. Шарнирный контроллер может быть отдельным электроприводом, частью электронного блока управления или частью программного обеспечения, используемого для контроля, и в данных материалах заявки, включая формулу изобретения, шарнирный контроллер относится к ним ко всем. В каждый момент времени шарнирный контроллер 13 берет контроль над контрольным клапаном 11 на основе разности заданного значения, предоставляемого блоком 14 управления, и информацией о координатах, получаемых с датчика 14 в соответствии с выбранным алгоритмом настройки.
Шарниры также могут быть призматическими, и в этом случае датчик измеряет линейное перемещение между шарнирными манипуляторами, вместо углового. Кроме того, контрольно-измерительное оборудование, как правило, включает в себя устройство 16 отображения, на котором можно отображать углы шарниров стрелы и/или декартовы координаты конца стрелы или приспособления. На практике в современных управляемых компьютером устройствах шарнирный контроллер и блок управления, как правило, представляют собой одинаковый блок обработки, т.е. микропроцессор, который следит за контролем и функционированием шарнирного контроллера посредством программного обеспечения. Понятно, что по сути в приложениях по изобретению также можно использовать другие различные известные решения.
На фиг. 3a-3c схематически показано устройство отображения пользовательского интерфейса при контроле стрелы для настройки шарнирного контроллера с использованием, например, модели одного шарнира с фиг. 2. На фиг. 3a показано устройство отображения, на дисплее которого отображен идентификатор теоретических координат/скорости для данного шарнира стрелы, причем идентификатор в принципе представляет собой эллипс, полученный из характеристик синусоидального сигнала, подаваемого в качестве заданного значения, и его производной. Теоретический целевой идентификатор 17 является целью, преследуемой при настройке шарнирного контроллера.
При настройке шарнира синусоидальный сигнал вводят в качестве заданного значения для шарнирного контроллера 13, тем самым угол рассматриваемого шарнира стрелы изменяется в возвратно-поступательном движении, например, на ± 2,5 градуса по обе стороны от положения в момент активации перемещения шарнира. Это изменение угла шарнира показано на горизонтальной оси устройства отображения. Соответственно, скорость движения шарнира, которая теоретически получается путем дифференцирования сигнала управления, равна нулю в крайнем положении перемещения в случае синусоидального изменения положения и при его максимальном значении, как, например, в случае, когда шарнир находится в средней точке синусоидального изменения положения. В свою очередь скорость показана на устройстве отображения по вертикальной оси, т.е. по оси y. Теоретически при изображении зависимости значения положения и значения скорости в каждый момент времени сформированный идентификатор в системе координат местоположения/скорости изображает эллипс. На практике идентификатор, получаемый по измерениям положения шарнира, не полностью соответствует теоретическому эллиптическому идентификатору. Настройка направлена на минимизацию разности между профилем, получаемым посредством полученного положения, и теоретическим эллиптическим профилем, получаемым посредством заданного значения.
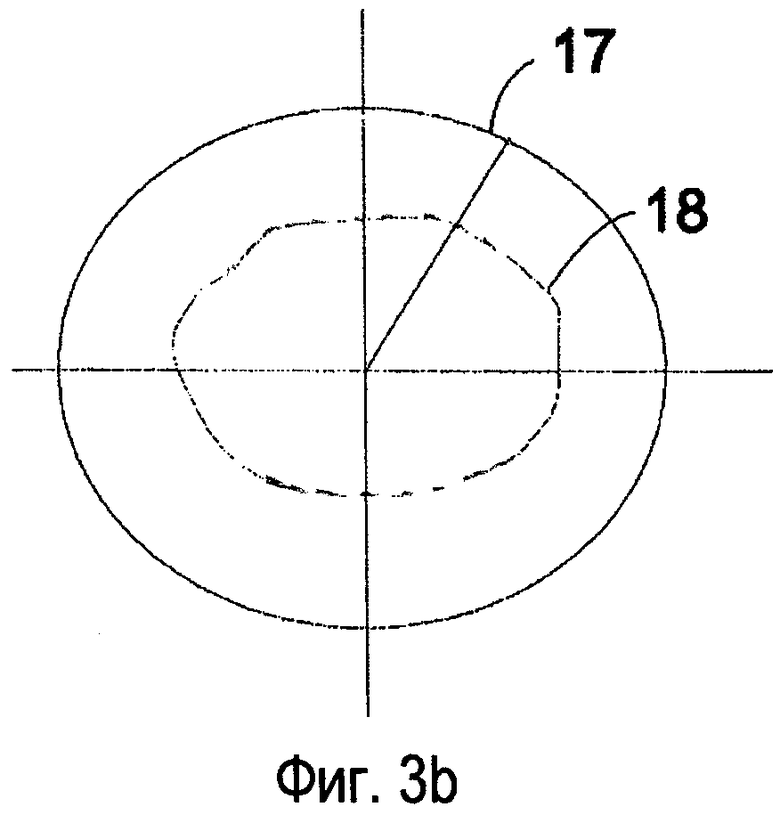
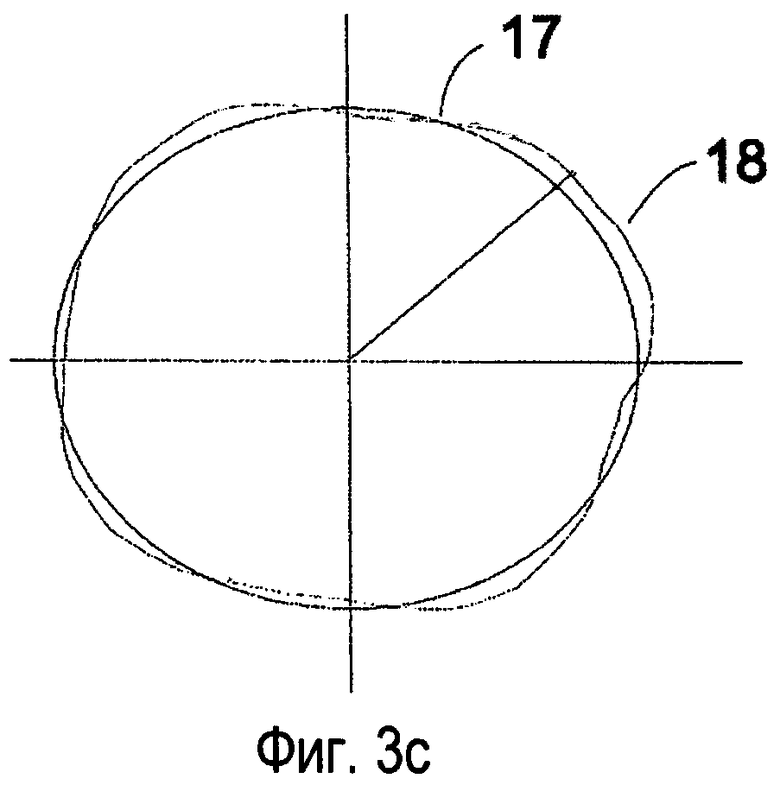
Например, как показано на фиг. 3, заданный идентификатор 18 положения стрелы и скорости движения приблизительно является эллиптическим. Существенно, что реализуемый профиль, т.е. идентификатор 18, большей частью находится внутри, чем снаружи профиля заданного значения. Таким образом, положение шарнира не достаточно хорошо следует изменению заданного значения, но запаздывает. В данной ситуации следует увеличить коэффициент усиления шарнирного контроллера. Оператор просто может изменить коэффициент усиления шарнирного контроллера с помощью клавиш “+” и “-”, тем самым будет сразу использован новый параметр. Оператор может отслеживать в режиме реального времени, как шарнир может следовать траектории путем сравнения идентификаторов, и регулировать параметры шарнирного контроллера на основе разницы профилей. Если профиль реализации большей частью находится снаружи, чем внутри профиля заданной величины, как показано на фиг. 3b, оператор может уменьшить коэффициент усиления шарнирного контроллера с помощью клавиши “-”, тем самым идентификаторы будут приближаться друг к другу. Теоретически на этой стадии идентификатор 18 перемещения стрелы является эллипсом размера целевого идентификатора 17, как показано на фиг. 3c. На практике полученный идентификатор содержит различные отклонения от теоретического эллипса, и достичь безупречного эллиптического идентификатора невозможно. Однако существенно, чтобы идентификатор был как можно ближе к целевому эллипсу, тем самым точность настройки стрелы будет настолько хорошей, насколько возможной для данного конкретного шарнира. Когда идентификаторы одного размера и формы, траектория, сформированная положением шарнира, также находится в полном соответствии с траекторией, сформированной заданным значением, в плоскости времени/положения, даже несмотря на появление задержки по времени между заданным значением и полученным положением шарнирного контроллера. Соответственно, также можно автоматически регулировать коэффициент усиления шарниров, сравнивая расстояния между реализуемым профилем и профилем заданного значения. Когда известно, что скорость и положение описывают эллипс и контроль за размером и формой этого эллипса позволяет сделать выводы о высоком качестве настройки шарнирных контроллеров, также можно автоматически сравнивать размер эллипса реализации с идеальным размером.
Когда регулировка выполняется автоматически, нет необходимости отображать какие-либо идентификаторы, но теоретические и фактические значения положения и скорости, получаемые с датчика, можно сравнить друг с другом математически, тем самым автоматизация выполняется посредством вычисления той же операции, что и механизм настройки в ручной настройке на основе идентификаторов, описываемых на устройстве отображения.
Когда в результате считывания с датчика получаются координаты шарнира, т.е. значения его положения и скорости, или его скорость вычисляется на основе последовательных координат и промежутка времени при переходе от одного момента времени к другому, реализацию можно сравнивать с планируемым по вычислениям кратчайшим расстоянием между полученным положением и теоретическим заданным значением в любой выборочный момент. Если шарнир как можно лучше следует синусоидальной траектории, среднее значение разностей между измеренными величинами и теоретическими заданными значениями для всего периода равно нулю.
Погрешность значений положения и скорости по отношению к заданным значениям вычисляется в любой выборочный момент и усредняется, когда достигается полная последовательность изменений заданных значений. Посредством вычисления средней погрешности можно получить направление и величину погрешностей между измеренными значениями положения и скорости и заданными значениями. Эту информацию можно использовать для регулировки параметра рассматриваемого шарнирного контроллера, чтобы минимизировать среднюю погрешность. После вычисления разности изменяется коэффициент усиления шарнирного контроллера так, чтобы изменение усиления было пропорционально величине погрешности.
Настройка является завершенной, когда разность достаточно близка к нулю. Тогда реализованные значения положения и скорости в равной степени больше заданных значений и меньше указанных значений. В данной ситуации траектория отслеживается наилучшим образом.
Остальные шарниры настраиваются соответствующим образом в вертикальном и горизонтальном направлениях. Чтобы достичь наилучшей точности, также необходимо, чтобы остальные шарниры стрелы были задействованы одновременно с настраиваемым шарниром, тем самым можно минимизировать нарушения, вызываемые действием других шарниров, по отношению к действию рассматриваемого шарнира. Таким образом, в конечном результате, общее поведение и динамика стрелы будет наилучшим образом соответствовать своему предназначению.
Настройка шарнирных контроллеров стрелы указанным выше способом дает наилучшие результаты в расположении стрелы, рядом с которым стрела управляется при настройке. Чтобы отыскать наилучшие значения параметров в разных частях рабочей области стрелы, стрелу можно настраивать во множестве разных положений в различных частях рабочей области.
После регулировки поведения стрелы все еще остается необходимым проверить стационарную точность шарнирных контроллеров. Это происходит, например, в случае работы шарниров в местоположениях, в которых траектория шарнира между местоположениями соответствует синусоидальному сигналу в половину периода. Затем можно посмотреть на устройстве отображения, с какой точностью траектория стрелы устанавливается в желаемом положении и, например, колебания стрелы или ее секции относительно конечного положения как функция времени. Это проиллюстрировано на фиг. 4, на которой схематически и теоретически показан идентификатор движения секции стрелы как функция времени.
Как показано на фиг. 4, стрела или секция стрелы повернута относительно шарнира так, что, по существу, между линиями 19a и 19b, представляющими крайние положения, она переместилась в соответствии с целевым идентификатором по обе стороны от нулевого положения, до текущего момента времени t1, где стрела остановилась в крайнем положении, определенном по сигналу управления, т.е. теоретически на линии 19a. Далее положение стрелы должно оставаться постоянным, если заданному значению следуют без превышений и отставаний, идентификатор положения 18 должен следовать линии 19a. Однако линия 18, представляющая положение стрелы, неточно находится на том же уровне, что и линия 19a, но осциллирует с обеих сторон от этой линии. Таким образом, после текущего момента времени t1 положение стрелы выше положения, определенного линией 19a, после чего оно колеблется в момент времени t2 ниже линии 19a, а затем возвращается к линии 19a, т.е. по существу к заданному положению в момент времени t3.
Когда изобретение осуществляют посредством компьютерной программы, оно включает в себя программный код, который осуществляет настройку работы стрелы описанным выше способом. Таким образом, программный код может осуществить регулировку коэффициента усиления шарнирного контроллера и регулировку перемещений между различными секциями стрелы, начиная с держателя стрелы до дальнего конца стрелы. Кроме того, программный код может осуществлять представление идентификатора в системе координат XY посредством значений положения и скорости движения, причем на одной оси идентификатор представляет значения положения, а на другой оси - значения скорости движения. Также программный код может использовать синусоидальный сигнал в качестве сигнала управления,
формировать целевой профиль на устройстве отображения на основе сигнала управления, в котором значения положения и скорости движения для целевого профиля расположены на разных осях перпендикулярной системы координат, и настраивать коэффициент усиления контроллера на основе соответствующего идентификатора, определенного по фактическим значениям положения и скорости движения, полученных с датчика,
формировать круговой или эллиптический идентификатор,
осуществлять автоматическую регулировку и
управлять буровой установкой для бурения по коренным породам.
Чертежи и соответствующее описание предназначены только для иллюстрации идеи изобретения. Особенности изобретения могут варьироваться в пределах объема формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕЛЛЕКТУАЛЬНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ СТРЕЛОЙ | 2007 |
|
RU2344923C1 |
| Установка для испытаний промышленного трактора | 1990 |
|
SU1742665A1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ СТРЕЛОВОГО КРАНА | 2009 |
|
RU2391285C1 |
| СПОСОБ ДЛЯ УПРАВЛЕНИЯ ВОЗДУШНЫМ УСТРОЙСТВОМ И ВОЗДУШНОЕ УСТРОЙСТВО С КОНТРОЛЛЕРОМ, ОСУЩЕСТВЛЯЮЩИМ ЭТОТ СПОСОБ | 2015 |
|
RU2695006C2 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
| Интеллектуальная интегрированная система управления диспетчеризацией кронблока | 2022 |
|
RU2835835C2 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2007 |
|
RU2347736C2 |
| РАБОЧЕЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2012 |
|
RU2596386C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРИВОДОМ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2006 |
|
RU2321534C2 |
| РЕВЕРСИВНАЯ ПЕРЕМЕННАЯ ТРАНСМИССИЯ (RVT) С ПОВЫШЕННОЙ УДЕЛЬНОЙ МОЩНОСТЬЮ | 2013 |
|
RU2654431C2 |
Изобретение относится к способу и устройству для регулировки работы гидравлической стрелы, содержащей, по меньшей мере, две подвижные друг относительно друга соединенные секции. В способе регулировки стрелы осуществляют контроль перемещения секций стрелы относительно заданного положения контрольным сигналом. Сравнивают фактические значения координат и скорости движения с теоретическими, определенными на основе контрольного сигнала. Регулируют параметры регулировки шарнирного контроллера на основе разностей фактических и теоретических значений. Устройство регулировки содержит, по меньшей мере, две секции стрелы, которые подвижно соединены для вращения вокруг оси относительно друг друга или для прямолинейного перемещения с помощью гидропривода. Также устройство регулировки содержит устройство управления гидроприводом, датчик определения перемещения и положения секций стрелы, устройства для сравнения фактических значений координат и скорости движения, устройства регулировки параметров шарнирного контроллера. Решение направлено на улучшение динамических характеристик перемещения стрелы и точности ее положения. 2 н. и 28 з.п. ф-лы, 4 ил.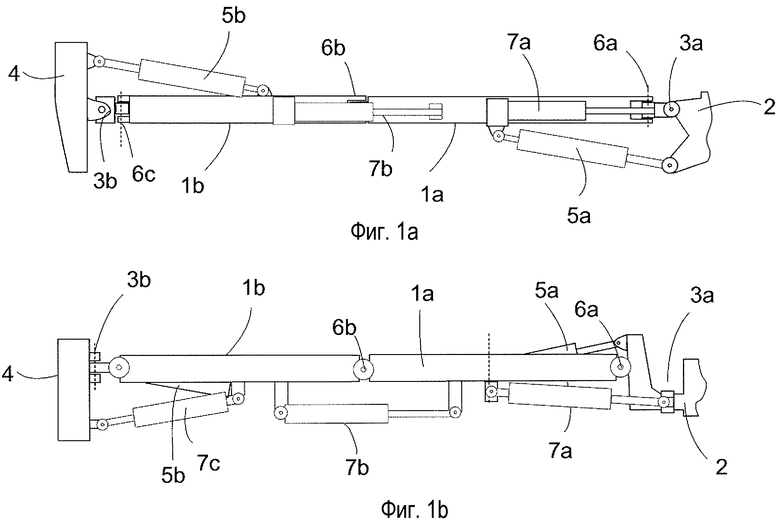
1. Способ регулировки работы гидравлической стрелы, содержащей, по меньшей мере, две подвижные относительно друг друга соединенные секции стрелы, которые подвижно соединены для вращения вокруг оси относительно друг друга или для прямолинейного перемещения с помощью гидропривода, устройства управления гидроприводами, датчик определения перемещения и положения между секциями стрелы, причем каждое перемещение управляется шарнирным контроллером, входящим в состав устройств управления, при этом для регулировки работы стрелы можно настроить параметр регулировки конкретного перемещения шарнирного контроллера в устройствах управления для каждого конкретного перемещения, отличающийся тем, что осуществляют контроль взаимного перемещения секций стрелы относительно заданного положения секций стрелы по обе его стороны симметричным и повторяемым контрольным сигналом; сравнивают фактические значения координат и скорости движения, полученные от датчика в ответ на контрольный сигнал, с теоретическими значениями координат и скорости движения, определенными на основе контрольного сигнала; и регулируют параметры регулировки шарнирного контроллера на основе разностей значений до достижения разностью фактических значений координат и скорости движения, полученных от датчика, и теоретических значений координат и скорости движения, определенных на основе контрольного сигнала, желаемой величины.
2. Способ по п.1, отличающийся тем, что используют коэффициент усиления для устройства регулировки стрелы в качестве параметра настройки.
3. Способ по п.1, отличающийся тем, что регулировку перемещений между различными секциями стрелы выполняют, начиная с держателя стрелы в направлении дальнего конца стрелы.
4. Способ по п.2, отличающийся тем, что регулировку перемещений между различными секциями стрелы выполняют, начиная с держателя стрелы в направлении дальнего конца стрелы.
5. Способ по любому из пп.1-4, отличающийся тем, что секции стрелы соединены друг с другом с возможностью вращения вокруг оси, а датчик положения определяет угол поворота вокруг оси.
6. Способ по любому из пп.1-4, отличающийся тем, что секции стрелы соединены друг с другом с возможностью прямолинейного перемещения, а датчик положения определяет длину перемещения.
7. Способ по любому из пп.1-4, отличающийся тем, что создают идентификатор посредством значений положения и скорости движения в системе координат XY, причем на одной оси представляются значения положения, а на другой оси - значения скорости движения.
8. Способ по любому из пп.1-4, отличающийся тем, что используют синусоидальный сигнал в качестве контрольного сигнала.
9. Способ по любому из пп.1-4, отличающийся тем, что на основе контрольного сигнала формируют целевой профиль на устройстве отображения, на котором значения положения и скорости движения представлены на разных осях перпендикулярной системы координат, и коэффициент усиления регулируют на основе соответствующего идентификатора, определенного на основе фактических значений положения и скорости движения, получаемых от датчика.
10. Способ по п.8, отличающийся тем, что на основе контрольного сигнала формируют целевой профиль на устройстве отображения, на котором значения положения и скорости движения представлены на разных осях перпендикулярной системы координат, и коэффициент усиления регулируют на основе соответствующего идентификатора, определенного на основе фактических значений положения и скорости движения, получаемых от датчика.
11. Способ по п.8, отличающийся тем, что идентификатор имеет круглую или эллиптическую форму.
12. Способ по п.9, отличающийся тем, что идентификатор имеет круглую или эллиптическую форму.
13. Способ по п.10, отличающийся тем, что идентификатор имеет круглую или эллиптическую форму.
14. Способ по любому из пп.1-4, отличающийся тем, что регулировку выполняют автоматически устройствами управления.
15. Способ по любому из пп.1-4, отличающийся тем, что в качестве стрелы используют стрелу буровой установки для бурения по коренным породам.
16. Устройство для регулировки работы гидравлической стрелы, содержащей, по меньшей мере, две подвижные относительно друг друга соединенные секции стрелы, которые подвижно соединены для вращения вокруг оси относительно друг друга или для прямолинейного перемещения с помощью гидропривода, устройства управления гидроприводами, датчик определения перемещения и положения между секциями стрелы, причем каждое перемещение управляется шарнирным контроллером, входящим в состав устройств управления, при этом для регулировки работы стрелы можно настроить параметр регулировки конкретного перемещения шарнирного контроллера в устройствах управления для каждого конкретного перемещения, отличающееся тем, что оно выполнено с возможностью контроля взаимного перемещения секций стрелы относительно заданного положения секций стрелы по обе его стороны симметричным контрольным сигналом, причем устройства управления включают в себя устройства для сравнения фактических значений координат и скорости движения, полученных от датчика в ответ на контрольный сигнал, с теоретическими значениями координат и скорости движения, определенными на основе контрольного сигнала, и устройства для регулировки параметров регулировки шарнирного контроллера на основе разностей значений до достижения разностью фактических значений координат и скорости движения, полученных от датчика, и теоретических значений координат и скорости движения, определенных на основе контрольного сигнала, желаемой величины.
17. Устройство по п.16, отличающееся тем, что параметр регулировки шарнирного контроллера, используемого в устройстве, является коэффициентом усиления шарнирного контроллера.
18. Устройство по п.16, отличающееся тем, что оно выполнено с возможностью регулировки перемещений между различными секциями стрелы, начиная от держателя стрелы в направлении дальнего конца стрелы.
19. Устройство по п.17, отличающееся тем, что оно выполнено с возможностью регулировки перемещений между различными секциями стрелы, начиная от держателя стрелы в направлении дальнего конца стрелы.
20. Устройство по любому из пп.16-19, отличающееся тем, что секции стрелы соединены друг с другом с возможностью вращения вокруг оси, причем датчик положения выполнен с возможностью определения угла поворота вокруг оси.
21. Устройство по любому из пп.16-19, отличающееся тем, что секции стрелы соединены друг с другом с возможностью прямолинейного перемещения, причем датчик положения выполнен с возможностью определения длины перемещения.
22. Устройство по любому из пп.16-19, отличающееся тем, что устройства управления выполнены с возможностью обеспечения идентификатора посредством значений положения и скорости перемещения в системе координат XY, причем на одной оси представлены значения положения, а на другой оси - значения скорости перемещения.
23. Устройство по любому из пп.16-19, отличающееся тем, что устройства управления выполнены с возможностью использования синусоидального сигнала в качестве контрольного сигнала.
24. Устройство по любому из пп.16-19, отличающееся тем, что устройства управления включают в себя устройство отображения, при этом устройства управления выполнены с возможностью формирования целевого профиля на устройстве отображения на основе контрольного сигнала, причем значения положения и скорости движения для профиля расположены на разных осях перпендикулярной системы координат, и для формирования соответствующего идентификатора на основе фактических значений положения и скорости движения, получаемых от датчика, так что коэффициент усиления можно регулировать на основе идентификаторов.
25. Устройство по п.23, отличающееся тем, что устройства управления включают в себя устройство отображения, при этом устройства управления выполнены с возможностью формирования целевого профиля на устройстве отображения на основе контрольного сигнала, причем значения положения и скорости движения для профиля расположены на разных осях перпендикулярной системы координат, и для формирования соответствующего идентификатора на основе фактических значений положения и скорости движения, получаемых от датчика, так что коэффициент усиления можно регулировать на основе идентификаторов.
26. Устройство по п.23, отличающееся тем, что устройства управления выполнены с возможностью формирования кругового или эллиптического идентификатора.
27. Устройство по п.24, отличающееся тем, что устройства управления выполнены с возможностью формирования кругового или эллиптического идентификатора.
28. Устройство по п.25, отличающееся тем, что устройства управления выполнены с возможностью формирования кругового или эллиптического идентификатора.
29. Устройство по любому из пп.16-19, отличающееся тем, что устройства управления выполнены с возможностью выполнения автоматической регулировки.
30. Устройство по любому из пп.16-19, отличающееся тем, что в качестве стрелы используется стрела буровой установки для бурения по коренным породам.
| US 6140787 А, 31.10.2000 | |||
| Рекуперативный замедлитель транспортного средства | 1972 |
|
SU605050A1 |
| Угольный микрофон | 1933 |
|
SU34617A1 |
| US 5953977 А, 21.09.1999 | |||
| СПОСОБ МАНИПУЛИРОВАНИЯ И РОБОТ, ИСПОЛЬЗУЕМЫЙ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1996 |
|
RU2140849C1 |

