Изобретение относится к оборудованию для подзарядки беспилотных летательных аппаратов (БПЛА), используемых для патрулирования автомобильных дорог по всей трассе, при обслуживании газо - нефтепроводов, сельхозугодий и лесного хозяйства.
В настоящее время БПЛА получили широкое распространение в различных областях техники. Преимуществами использования БПЛА являются, в том числе, дешевизна эксплуатации, простое и удобное управление полетом по сравнению с традиционными летательными аппаратами.
Мировая тенденция развития беспилотных систем показала целесообразность появления базовых зарядных станций для БПЛА, являющихся логичной ступенью в развитии беспилотной отрасли.
Известна станция для беспилотного летательного аппарата (RU 194136, кл. B64C 39/02, 2019 г), содержащая корпус, в котором образован отсек для беспилотного летательного аппарата, закрытый сверху створками, оснащенными механизмами их открывания-закрывания, установленную в отсеке платформу, оснащенную элементами позиционирования беспилотного летательного аппарата при его посадке на платформу, а также блок управления, имеющий возможность связи с установленными на платформе элементами позиционирования. Платформа снабжена трехосевым акселерометром и гироскопом и установлена на опорах, каждая из которых оснащена механизмом регулирования ее положения по высоте, включающим управляемый сервопривод, имеющий возможность связи с блоком управления, с которым также имеют возможность соединения трехосевой акселерометр и гироскоп.
Недостатком известного устройства является сложность и дороговизна конструкции, необходимость ежедневной доставки оборудования на объект и обратно, ежедневный монтаж-демонтаж.
Известна автономная зарядная станция для малого БПЛА https://nplus1.ru/news/2016/02/18/dronebox, в которую входит платформа для зарядки, хранения и запуска аппаратов без участия человека. Внутри платформы расположена подвижная посадочная заряжающая площадка с встроенным беспроводным зарядным устройством, включающим приемную катушку и индуктивную передающую катушку. Внутри корпуса установлено управляющее от контроллера устройство, аккумулятор - накопитель, крышку, в которую встроены солнечные батареи и зарядную площадку. Площадка снабжена раздвижной крышкой, в которую встроены панели солнечных батарей. После зарядки БЛА крышка раздвигается и взлётно–посадочная платформа поднимает БЛА. После окончания полета по маршруту БЛА приземляется на платформу, которая опускается внутрь корпуса на подзарядку. Управление автономной зарядной станции осуществляется с помощью встроенного микропроцессора.
Известное устройство также является сложным по конструкции, требующее для его подзарядки спуск платформы и подъем после окончания процесса зарядки, а также необходимость ежедневной доставки оборудования на объект и обратно, ежедневный монтаж-демонтаж устройства.
Проблемой, на которую направлено изобретение, является разработка простой и облегченной конструкции автономной зарядной станции беспилотных летательных аппаратов, с возможностью ее стационарного размещения на месте применения на столбах и мачтах, не требующей постоянного монтажа–демонтажа, возможность защиты в нерабочее время от атмосферных осадков (дождя, снега и др.), сучков и мусора, поддерживая тем самым ее в работоспособном и исправном состоянии.
Техническим результатом изобретения является упрощение конструкции и повышение эксплуатационных характеристик за счет простоты обслуживания.
Технический результат достигается за счет того, что автономная зарядная станция для беспилотных летательных аппаратов включает корпус, внутри которого установлено управляющее от контроллера зарядное устройство со встроенной приемной катушкой и индуктивной передающей катушкой, аккумулятор - накопитель, крышку, в которую встроены солнечные батареи и зарядную площадку. Согласно изобретению, зарядная станция дополнительно снабжена кронштейном для монтажа на вертикальной опере, подвижно связанным, с помощью актуатора, с корпусом, с возможностью поворота для изменения положения корпуса из горизонтального, в вертикальное. Кронштейн включает верхний и нижний поддерживающие участки крепления, к нижнему участку кронштейна шарнирно прикреплен корпус актуатора, шток которого шарнирно соединен с днищем корпуса. На поддерживающей консоли верхнего поддерживающего участка кронштейна смонтировано поворотное устройство, связанное с корпусом, для передачи вращения корпусу и крышке, содержащее неподвижную ведущую звездочку, ось которой сосна с осью поворота корпуса, ведущая звездочка приводной цепью связана с ведомой звездочкой, выполненной монолитно с ведущей шестерней, входящей в зацепление с ведомой шестерней, установленной на валу вращения крышки.
Поворотное устройство, выполнено в виде мультипликатора с повышающим передаточным числом 1,5.
Автономная зарядная станция снабжена GSM-модулем, установленным в корпусе.
Наличие кронштейна, механизма поворота корпуса станции и крышки с солнечной батареей для ее закрытия и открытия, позволяет монтировать станцию для зарядки беспилотных летательных аппаратов стационарно на вертикальной опоре без ее ежедневного демонтажа, что исключает потребность постоянно ее снимать, перевозить и на следующий день снова устанавливать на месте для подзарядки летательных аппаратов. При этом опоры могут быть установлены в любом месте обслуживаемых объектов, обеспечивая подзарядку БПЛА по мере необходимости в течение всего рабочего времени.
Актуатор обеспечивает поворот корпуса станции из горизонтального, рабочего положения в ждущий режим с вертикальным расположением корпуса, когда БПЛА не работают. Это необходимо для того, чтобы предохранить принимающую площадку в ждущем режиме от осадков (дождя и снега), веток и пыли и т.д., поддерживая ее в рабочем состоянии, исключая ухудшение контакта со спускаемым беспилотником или вообще невозможность приземления.
Наличие поворотного устройства, передающего вращение крышки с солнечной батареей, позволяет в нерабочее время автономно переводить ее в нерабочее, вертикальное положение, обеспечивая защиту зарядных элементов солнечной батареи от загрязнения, что значительно продлит службу всего устройства.
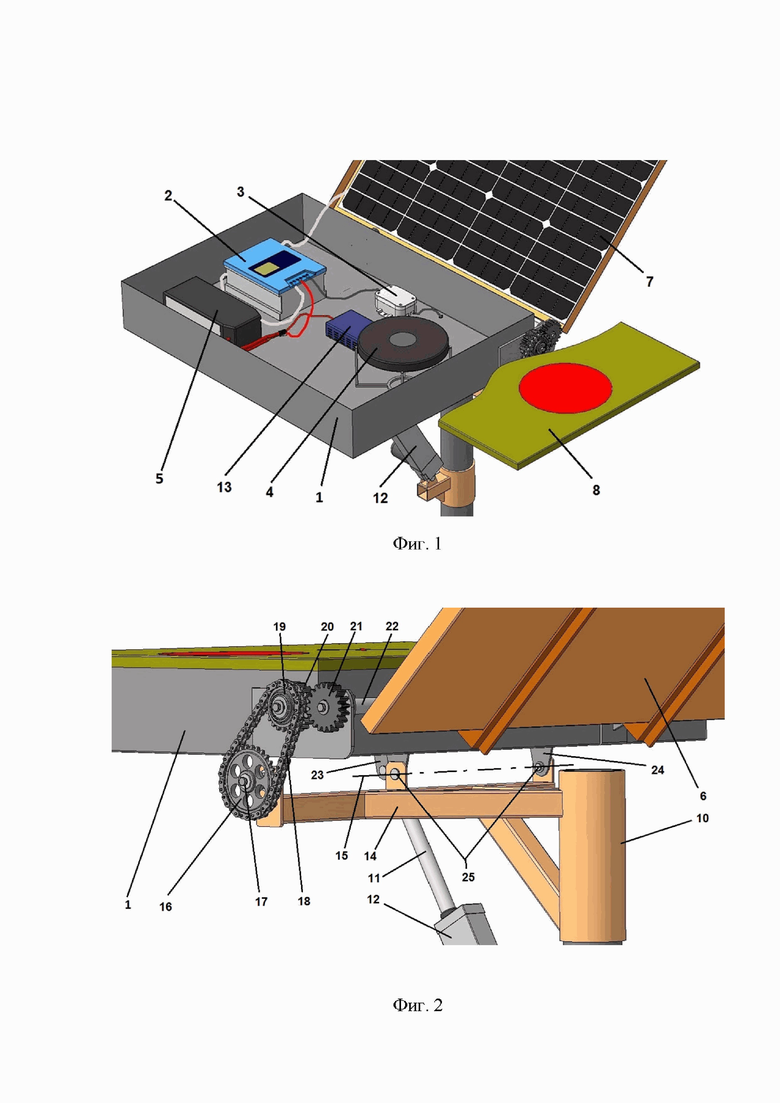
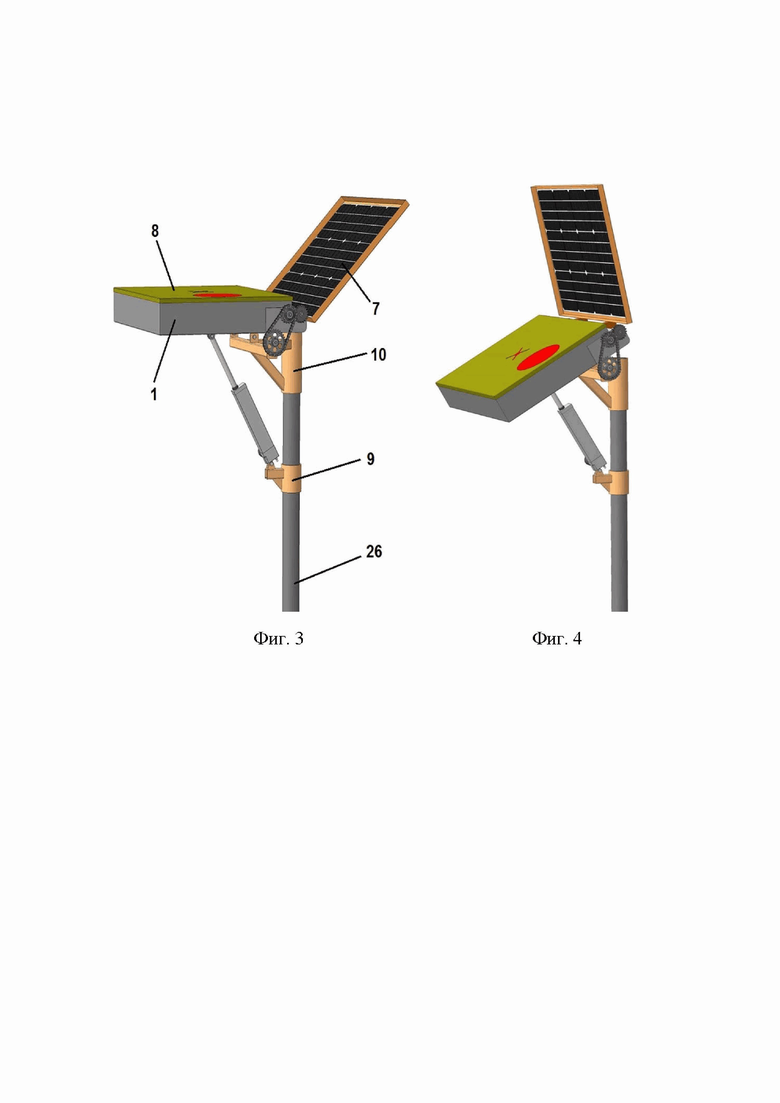
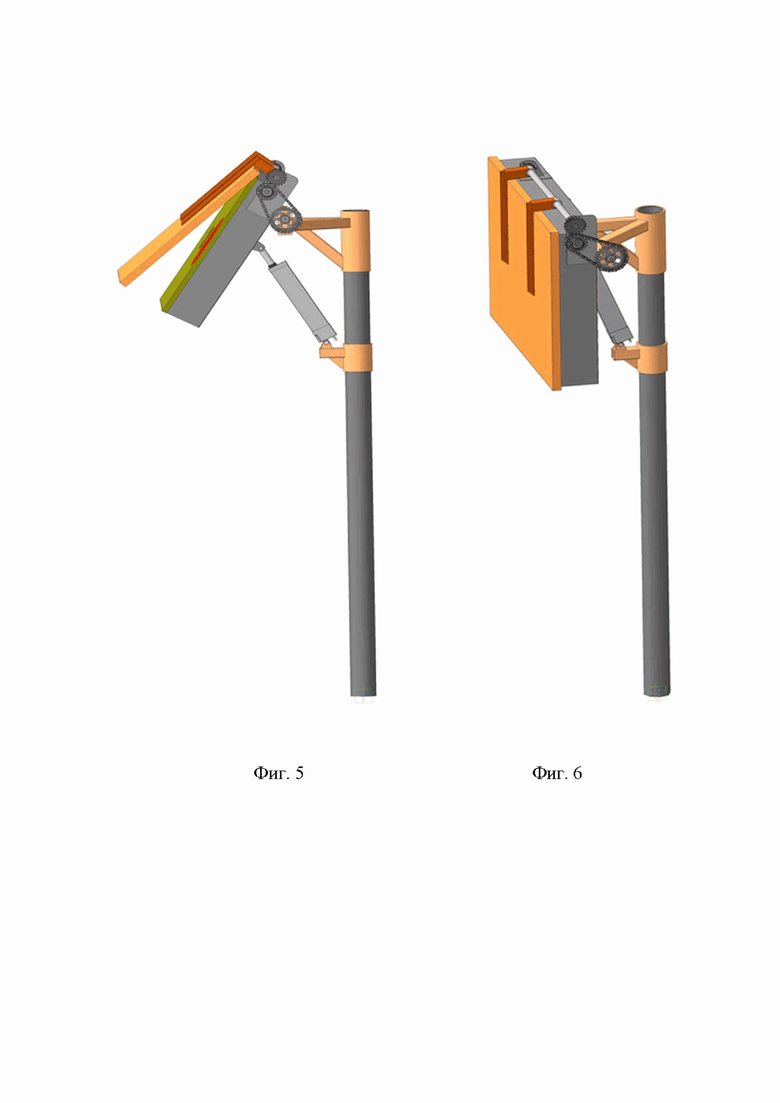
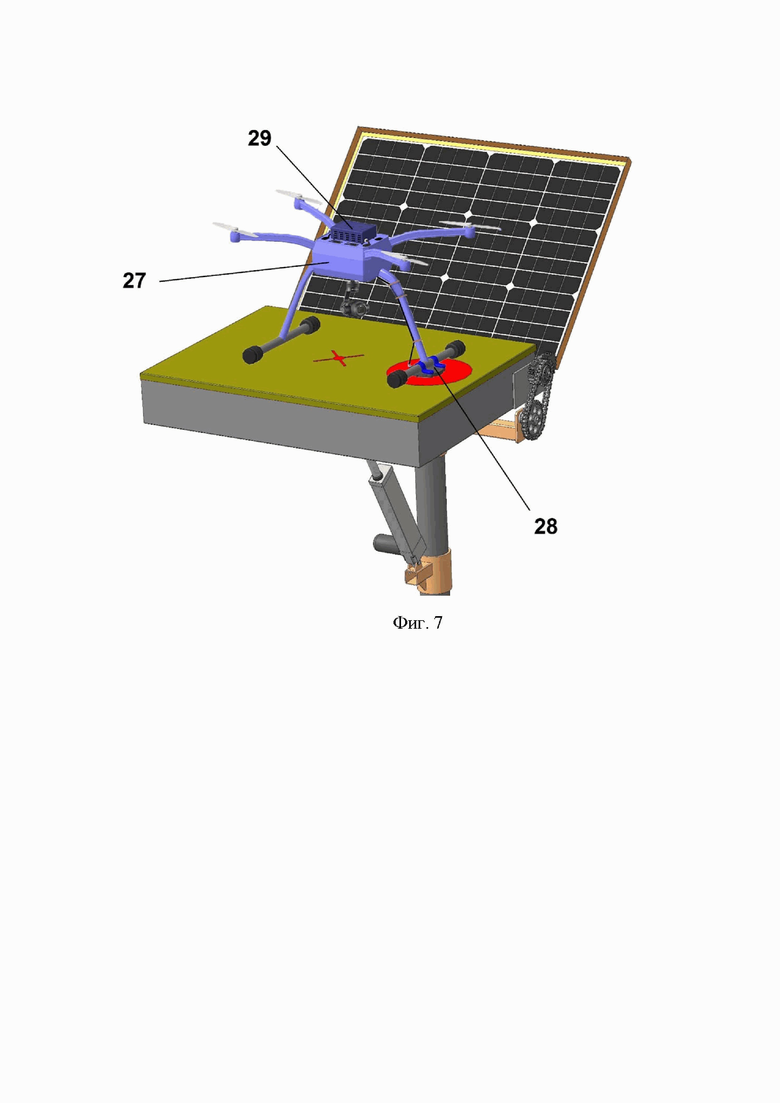
Автономная зарядная станция для беспилотных летательных аппаратов иллюстрируется следующими чертежами, где: на фиг. 1 – приборы зарядной станции; на фиг. 2 – устройство поворота крышки; на фиг. 3 - автономная зарядная станция в рабочем положении; на фиг. 4 и 5 момент перевода зарядной станции в режим ожидания; на фиг. 6 – автономная зарядная станция в нерабочем положении; на фиг. 7 – зарядка БПЛА.
На чертежах позициями обозначено:
1 – корпус, изготовленного из тонколистового металла;
2 – контроллер МРРТ или PWM;
3 - GSM-модуль,
4 – индуктивная передающая катушка;
5 – аккумулятор – накопитель;
6 – крышка;
7 – солнечная батарея;
8 – принимающая площадка, выполненная из диэлектрического материала;
9 – нижний поддерживающий участок крепления;
10 – верхний поддерживающий участок крепления;
11 – шток;
12 – актуатор;
13 – зарядное устройство;
14 – поддерживающая консоль кронштейна;
15 – ось поворота корпуса;
16 – неподвижная ведущая звездочка;
17 – ось ведущей звездочки;
18 – приводная цепь;
19 – ведомая звездочка;
20 – ведущая шестерня, выполненная монолитно с ведомой звездочкой 19;
21 – ведомая шестерня;
22 – вал, с закрепленной на ней ведомой шестерней 21;
23 – серьга;
24 – проушины;
25 – ось;
26 – вертикальная опора;
27 – беспилотный летательный аппарат;
28 – приемная катушка беспилотного летательного аппарата;
29 – передающая катушка беспилотного летательного аппарата
Автономная зарядная станция для беспилотных летательных аппаратов работает следующим образом.
В нерабочее время станция находится в вертикальном положении (Фиг.6) с закрытой крышкой 6 и солнечной батареей 7. Для начала работы подается сигнал в виде телефонного звонка на номер SIM-карты, установленной в GSM-модуле 3. Устройство принимает вызов, сверяет номер с базой данных пользователей, имеющих доступ, и самостоятельно обрывает связь. После чего на актуатор 12 подается питание, и шток 11 поворачивает корпус 1 вокруг оси 15, переводя ее из вертикального положения в горизонтальное.
С началом вращения корпуса 1 неподвижную ведущую звездочку 16 начинает огибать цепь 18, приводя во вращение против часовой стрелки ведомую звездочку 19 и, соответственно, ведущую шестерню 20, которая начинает вращать в обратном направлении (по направлению вращения станции), а через ведомую шестерню 21, закрепленную на валу 22, крышку 6. При этом вращение крышки 6 происходит быстрее в полтора раза за счет повышающего общего передаточного числа мультипликатора с целью поворота крышки 6 с батареей 7 на больший заданный угол (в зависимости от региона обслуживаемого объекта, в условиях средней полосы России - на 135○) по сравнению с углом поворота корпуса 1 станции. Крышка 6 открывается и панели солнечной батареи 7 готовы к работе. Таким образом, с началом поворота корпуса 1 зарядной станции происходит в том же направлении и поворот крышки 6 с солнечной батареей 7, только с большей угловой скоростью в зависимости от заданного угла наклона солнечной батареи.
С открытием солнечной батареи 7 поступающая от нее солнечная энергия начинает заряжать аккумулятор-накопитель 5, который набирает и хранит заряд. При этом уровень заряда аккумулятора 5 постоянно контролируется контроллером 2. Если он низкий, контролер 2 включает в работу солнечную батарею 7. В случае высокого заряда контроллер 2 солнечную батарею 7 отключает. Далее включается в работу зарядное устройство 13, которое преобразовывает постоянный ток в переменный заданной мощности в зависимости от модели и емкости заряжаемого аккумулятора беспилотного летательного аппарата (БПЛА).
Во время зарядки БПЛА 27 на принимающей площадке 8 при прохождении полученного переменного тока по обмотке передающей катушки 4 образуется магнитное поле необходимой мощности, которое взаимодействует с приемной катушкой 28 БПЛА и возбуждает в ней переменный ток. Далее происходит обратный процесс преобразования: переменный ток в передатчике 29 БПЛА выпрямляется в постоянный, затем происходит уменьшение полученного напряжения для получения тока, пригодного для зарядки БПЛА.
По окончании рабочего времени или при ухудшении погодных условий, когда БПЛА не могут работать и возвращаются на базу, корпус 1 зарядной станции и крышка 6 с солнечной батареей 7 поворачиваются в обратной последовательности, занимая положение ждущего режима (Фиг.6).
Таким образом, зарядная станция с питанием от солнечной батареи 7, благодаря поворотному механизму позволяет сохранить станцию в работоспособном состоянии, защитить ее от осадков, веток и мусора в нерабочее время, в результате чего появилась возможность ее стационарной безопасной установки на обслуживаемых объектах, не требующей ежедневного монтажа-демонтажа и доставки на объект и обратно.
Представленное описание и иллюстрирующие материалы осуществления автономной зарядной станции для беспилотных летательных аппаратов не ограничивают заявленное техническое решение. Устройство может быть в пределах формулы изобретения расширено. Например, кронштейн может быть выполнен сплошным, с разнесенными верхним и нижним участками крепления, в зависимости от модификации используемых для зарядки беспилотных летательных аппаратов могут быть использованы разные модели управляющего устройства и контроллера.
В настоящее время изготовлен действующий макет автономной зарядной станции для беспилотных летательных аппаратов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| АВТОМАТИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ЭЛЕКТРОСЕТЕВОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2674550C1 |
| Устройство подзарядки аккумуляторных элементов беспроводной сенсорной сети | 2024 |
|
RU2826802C1 |
| УСТАНОВКА ДЛЯ ОСВЕЩЕНИЯ ОКРУЖАЮЩЕЙ ТЕРРИТОРИИ | 2017 |
|
RU2726857C2 |
| Гибридная аэромобильная система воздушного наблюдения | 2023 |
|
RU2827131C1 |
| Устройство для зарядки БПЛА от провода воздушной линии электропередачи | 2023 |
|
RU2811167C1 |
| СИСТЕМА ДОСТАВКИ ГРУЗА | 2018 |
|
RU2689643C1 |
| Беспилотная система мониторинга поверхности земли | 2022 |
|
RU2788553C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов | 2023 |
|
RU2821204C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |
Изобретение относится к области электротехники, в частности к оборудованию для подзарядки беспилотных летательных аппаратов. Технический результат заключается в упрощении конструкции и повышении эксплуатационных характеристик. Достигается тем, что автономная зарядная станция для беспилотных летательных аппаратов включает корпус, внутри которого установлено управляющее от контроллера зарядное устройство со встроенной приемной катушкой и индуктивной передающей катушкой, аккумулятор - накопитель, крышку, в которую встроены солнечные батареи, и зарядную площадку, при этом зарядная станция снабжена кронштейном для монтажа на вертикальной опоре, подвижно связанным, с помощью актуатора, с корпусом, с возможностью поворота для изменения положения корпуса из горизонтального в вертикальное. 2 з.п. ф-лы, 7 ил.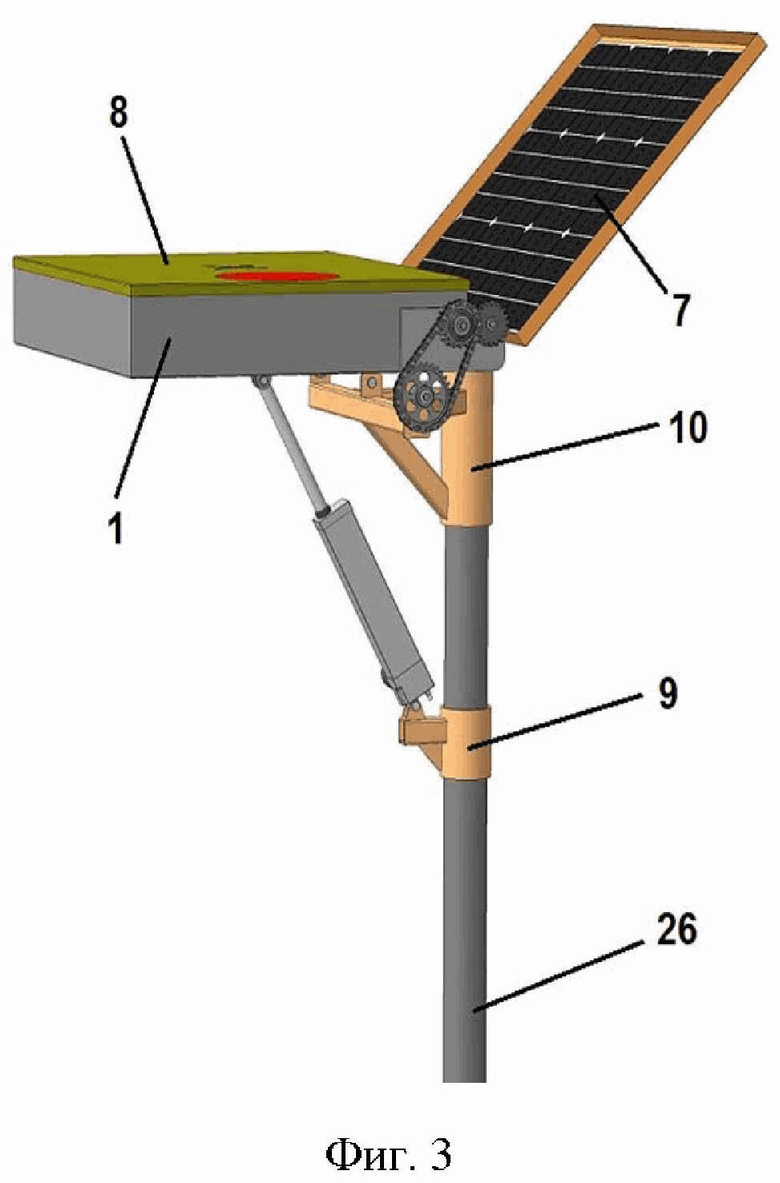
1. Автономная зарядная станция для беспилотных летательных аппаратов включает корпус, внутри которого установлено управляющее от контроллера зарядное устройство со встроенной приемной катушкой и индуктивной передающей катушкой, аккумулятор - накопитель, крышку, в которую встроены солнечные батареи, и зарядную площадку, отличающаяся тем, что зарядная станция дополнительно снабжена кронштейном для его монтажа на вертикальной опоре, подвижно связанным с корпусом с помощью актуатора с возможностью поворота, для изменения положения корпуса из горизонтального в вертикальное, кронштейн включает верхний и нижний поддерживающие участки крепления, к нижнему участку кронштейна шарнирно прикреплен корпус актуатора, шток которого шарнирно соединен с днищем корпуса, на поддерживающей консоли верхнего поддерживающего участка кронштейна смонтировано поворотное устройство, связанное с корпусом, для передачи вращения корпусу и крышке, содержащее неподвижную ведущую звездочку, ось которой соосна с осью поворота корпуса, ведущая звездочка приводной цепью связана с ведомой звездочкой, выполненной монолитно с ведущей шестерней, входящей в зацепление с ведомой шестерней, установленной на валу вращения крышки.
2. Автономная зарядная станция по п. 1, отличающаяся тем, что поворотное устройство выполнено в виде мультипликатора с повышающим передаточным числом 1,5.
3. Автономная зарядная станция по п. 1, отличающаяся тем, что она снабжена GSM-модулем, установленным в корпусе.
| 0 |
|
SU194136A1 | |
| Система подзарядки аккумулятора беспилотного летательного аппарата | 2017 |
|
RU2657866C1 |
| СИСТЕМА ПОДЗАРЯДКИ АККУМУЛЯТОРА ЭЛЕКТРИЧЕСКОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2523420C1 |
| Способ ультразвукового контроля поверхностных и подповерхностных дефектов металлопродукции и устройство для его осуществления | 2016 |
|
RU2644438C1 |
| US 2018229859 A1, 16.08.2018. | |||

