Заявленная группа изобретений относится к конструкции автоматической станции зарядки и обслуживания многовинтовых беспилотных летательных аппаратов и многовинтового беспилотного летательного аппарата, работающего совместно с ней, и может быть использовано для создания сети обслуживания БПЛА, что позволит выполнять различные задачи с использованием БПЛА, дальность полета которых ограничена емкостью аккумулятора.
Зарядка аккумулятора и обслуживание БПЛА в автоматическом режиме требуют точного позиционирования и ориентации БПЛА на посадочной платформе. Неопределенность позиционирования возникает вследствие неточности работы системы управления процессом посадки и таких погодных факторов, как порывистый ветер, туман, снег, дождь, которые как правило ухудшают процесс наведения или вводят неточности в последний момент посадки БПЛА, когда система управления уже не в состоянии провести корректировки местоположения садящегося аппарата с необходимой точностью. Известны автоматические станции зарядки и обслуживания БПЛА, в которых после посадки на платформу производится корректировка его местоположения каким-либо активным устройством (манипулятором). Автоматическая станция, согласно заявке US 2014/0124621 А1, принимает БПЛА на плоскую посадочную платформу. После посадки БПЛА механизм выравнивания перемещает четырьмя планками БПЛА в зону позиционирования, в которой осуществляется зарядка, замена аккумулятора или иной вид обслуживания. Для лучшего обслуживания БПЛА может дополнительно фиксироваться специальным устройством или механизмом выравнивания.
Автоматическая станция, согласно заявке US 2014/0319272 А1, также принимает БПЛА на плоскую посадочную платформу, однако после этого БПЛА с помощью двух планок выводит аппарат их зоны посадки в зону зарядки и обслуживания. Данные устройства имеют возможность принимать БПЛА обычной конструкции, которые способны приземлиться на любую поверхность, однако конструкция станции получается сложной.
Известны автоматические станции зарядки и обслуживания БПЛА, содержащие пассивные устройства позиционирования БПЛА при приземлении. Конструкция устройства позиционирования, как правило, рассчитана на данный тип БПЛА. Сам БПЛА имеет возможность приземления как на данную станцию, так и любую другую горизонтальную поверхность. Автоматическая станция, согласно патенту US 9,139,310 В1, содержит конические углубления на посадочной платформе по местам расположения шасси БПЛА. Данная конструкция позиционирует БПЛА, если отклонение от точки посадки не более радиуса конуса в верхней части. Данная конструкция способна принимать аппараты с таким же расположением шасси.
Доставочная платформа для беспилотных транспортных средств, согласно US 2015/ 0175276 А1, имеет выступающий над посадочной поверхностью усеченную пирамиду основание, которой равно расстоянию посадочных лыж БПЛА. При посадке взаимодействие опорных лыж БПЛА и пирамиды приводит к необходимому позиционированию.
Посадочная платформа для БПЛА, согласно US D805,018 S, выполнена по размеру расположения опор БПЛА и имеет вокруг наклонные поверхности. После посадки БПЛА скатывается по этим поверхностями позиционируется на посадочной платформе. Указанные конструкции станции, как правило, не содержат устройств удержания аппарата на посадочной платформе.
Известны автоматические станции зарядки и обслуживания БПЛА, содержащие пассивные устройства позиционирования БПЛА при приземлении, в которых конструкция устройства позиционирования рассчитана на данный тип посадочного устройства БПЛА. Сам БПЛА имеет посадочное устройство, рассчитанное на взаимодействие с устройством позиционирования станции, и поэтому аппарат, как правило, не имеет возможность приземления на другие устройства или горизонтальную поверхность. Посадочное устройство БПЛА, согласно US 9,499,265 В2, содержит посадочную платформу в виде конического углубления, в котором установлены контакты для зарядки аккумулятора, сменный аккумулятор и другие устройства. БПЛА имеет кольцевую опору, от которой поднимаются ножки, образующие каркас направленной острием вниз усеченной пирамиды. Точность позиционирования при посадке обеспечивается взаимодействием кольцевой опоры и ножек с коническим углублением. Позиционирование по вертикальной оси вращения достигается вращением опорной поверхности посадочной платформы вокруг вертикальной оси. Источник предусматривает возможность выполнения посадочной праформы в виде многоугольника. В этом случае опора БПЛА должна иметь ту же форму, и это позволяет обеспечить нужную ориентацию без вращения опорной поверхности посадочной платформы.
Система стыковки с воздушным транспортным средством US 9,561,871 В2 включает в себя посадочную площадку и воздушное транспортное средство. У посадочной площадки имеется опускающаяся к центру коническая поверхность. В центре имеется углубление по размерам посадочной поверхности воздушного транспортного средства. В воздушном транспортном средстве имеется посадочная поверхность с колесами. Выступ и посадочное устройство размещены на нижней поверхности воздушного судна. После посадки на коническую поверхность воздушное транспортное средство скатывается к центру, и ее посадочная поверхность опускается в центральное углубление. На воздушном транспортном средстве и посадочной площадке имеются контакты для подачи напряжения для зарядки аккумулятора, которые контактируют между собой.
Известно также посадочное устройство БПЛА, согласно US 2016/ 00395.41 А1, которое содержит посадочную площадку, выполненную в виде короны, посадочное устройство БПЛА в виде двух расположенных накрест стержней. Во впадинах размещены контакты для подачи зарядного напряжения, на посадочных стержнях размещены ответные контакты. Посадочная платформа имеет механизмы для фиксации посадочных стержней. На посадочной платформе содержатся источники излучения, на БПЛА видеокамера или датчики излучения. БПЛА подлетает к посадочному устройству и садится, ориентируясь на расположенные на нем источники излучения. Неточность посадки, которая может быть вызвана неточностью работы системы посадки или порывами ветра, нивелируется при взаимодействии поверхности посадочной площадки и посадочных стержней БПЛА за счет пассивного гравитационного центрирования. Устройства данного типа достаточно просты и обеспечивают наилучшее взаимодействие системы посадочная платформа - БПЛА, однако сам БПЛА имеет посадочное устройство, рассчитанное на взаимодействие только со своей станцией, и не имеет возможность приземления на другие устройства или горизонтальную поверхность.
Наиболее близким аналогом (прототипом) заявленной автоматической станции зарядки и обслуживания беспилотных летательных аппаратов по мнению заявителя является автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней, известная из патента RU 2721048, опубл. 15.05.2020. Автоматическая станция содержит посадочную платформу с посадочными огнями или маркерами, контакты подачи напряжения, блок питания и блок управления. Посадочная платформа выполнена в виде полого многогранника, внутренняя поверхность которого повторяет наружную поверхность, с количеством вершин, равным количеству шасси БПЛА. Посадочная платформа установлена на опорах или держателе, на которые установлен по крайней мере один вибратор. БПЛА содержит корпус, лучи с двигателями и воздушными винтами, аккумулятор, контакты для подачи напряжения и шасси, выполненные подвижными, имеющие положение «на земле», при котором шасси установлены вертикально вниз, «полетное» положение, при котором шасси разнесены максимально в стороны. Шасси имеют положение «взлета/посадки», при котором шасси сведены вниз к центру с образованием обращенной вниз пирамиды или усеченной пирамиды, а также положение, при котором шасси раздвинуты до касания нижней поверхности посадочной платформы и поджатая ими электрических контактов, находящихся на посадочной платформе и на БПЛА.
Предложенный прототип наиболее близко подходит к решению проблем, решаемых заявленным изобретением, однако, по мнению заявителя проблема решается не самым эффективным способом.
Техническим результатом является ускорение процесса позиционирования БПЛА при посадке и закрытия люка посадочной платформы путем совмещения этих процессов и упрощения конструкции, за счет того, что процесс позиционирования и закрытия люка осуществляется одним приводом.
Технический результат достигается посредством создания автоматической станции зарядки и обслуживания беспилотных летательных аппаратов, содержащей корпус, выполненный на боковой стенке корпуса по меньшей мере один люк, крышку люка с установленными в нижней части шарнирными петлями, посадочную площадку и устройство позиционирования БПЛА после приземления.
Автоматическая станция, характеризуется тем, что на внутренней стенке крышки люка на опорах установлено по меньшей мере две, выполненных из прутка направляющих в виде фигуры незамкнутого или замкнутого контура, содержащего по меньшей мере один внутренний угол.
В частном варианте выполнения направляющие выполнены в виде буквы «V» или в форме капли, или ромба, или квадрата.
В частном варианте выполнения автоматическая станция содержит по меньшей мере одну направляющую, выполненную в виде буквы «W».
В частном варианте выполнения вершина внутреннего угла выполнена в виде «U» образного заглубления.
В одном из вариантов выполнения направляющие установлены таким образом, что вершина внутреннего угла направлена к нижней части крышки люка.
В одном из вариантов выполнения автоматическая станция содержит две направляющих, которые установлены на одинаковом расстоянии от нижней кромки крышки люка.
В одном из вариантов выполнения автоматическая станция содержит две направляющих, которые установлены на одной перпендикулярной линии к нижней кромке крышки люка линии.
В одном из вариантов выполнения расстояние между направляющими регулируется. В другом варианте выполнения автоматическая станция содержит четыре направляющие, которые установлены по углам квадрата с возможность перемещения по диагонали квадрата.
В другом варианте выполнения внутренняя стенка крышки люка содержит места крепления направляющих, обеспечивающих крепление направляющих с различным расстоянием между ними.
В другом варианте выполнения автоматическая станция содержит по меньшей мере один толкатель, который толкает по меньшей мере две опоры БПЛА.
В другом варианте выполнения крышка люка выполнена прямоугольной формы.
В другом варианте выполнения крышка люка выполнена пятиугольной формы.
В частном варианте выполнения шарнирные петли расположены ниже нижней кромки крышки люка.
В частном варианте выполнения автоматическая станция содержит по меньшей мере два люка.
В частном варианте выполнения крышка люка содержит установленный в нижней части желоб, который может быть обогреваемым.
В частном варианте выполнения направляющие выполнены из электропроводного материала и изолированы друг от друга.
В частном варианте выполнения установлена на основание с возможностью вращения вокруг вертикальной оси.
Технический результат достигается также посредствам автоматической станции зарядки и обслуживания беспилотных летательных аппаратов, содержащей корпус, выполненный на боковой стенке корпуса по меньшей мере один люк, крышку люка с установленными в нижней части шарнирными петлями, посадочную площадку и устройство позиционирования БПЛА после приземления.
Сущность изобретения поясняется следующим графическим материалом.
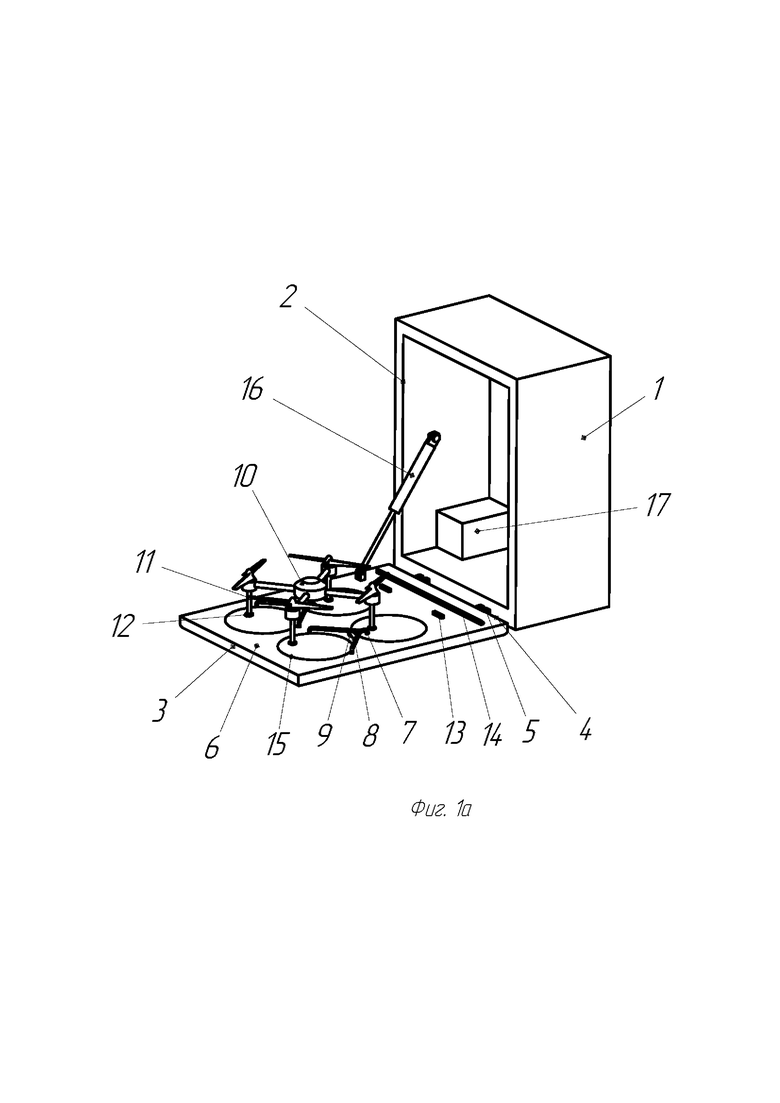
На фиг. 1а изображен вариант исполнения автоматической станции зарядки и обслуживания беспилотных летательных аппаратов с открытой крышкой и приземленным на ее внутренней поверхности БПЛА.
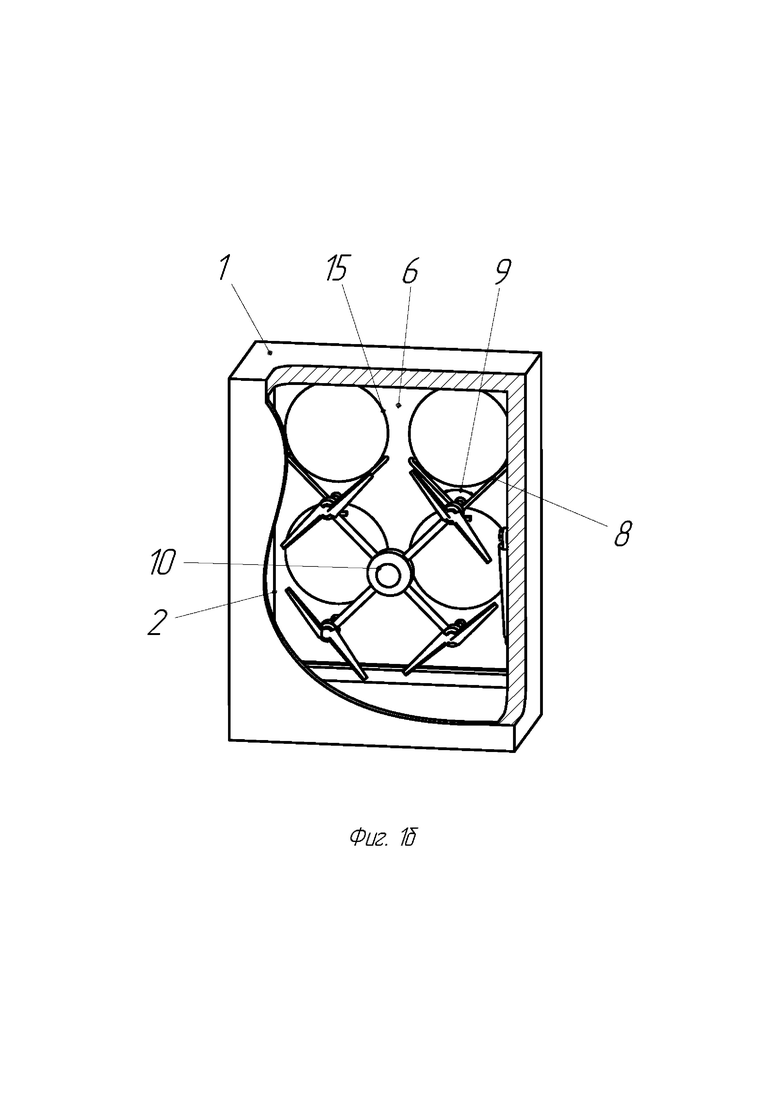
На фиг. 16 изображен вариант исполнения автоматической станции зарядки и обслуживания беспилотных летательных аппаратов с закрытой крышкой и позиционированным на ее внутренней поверхности БПЛА.
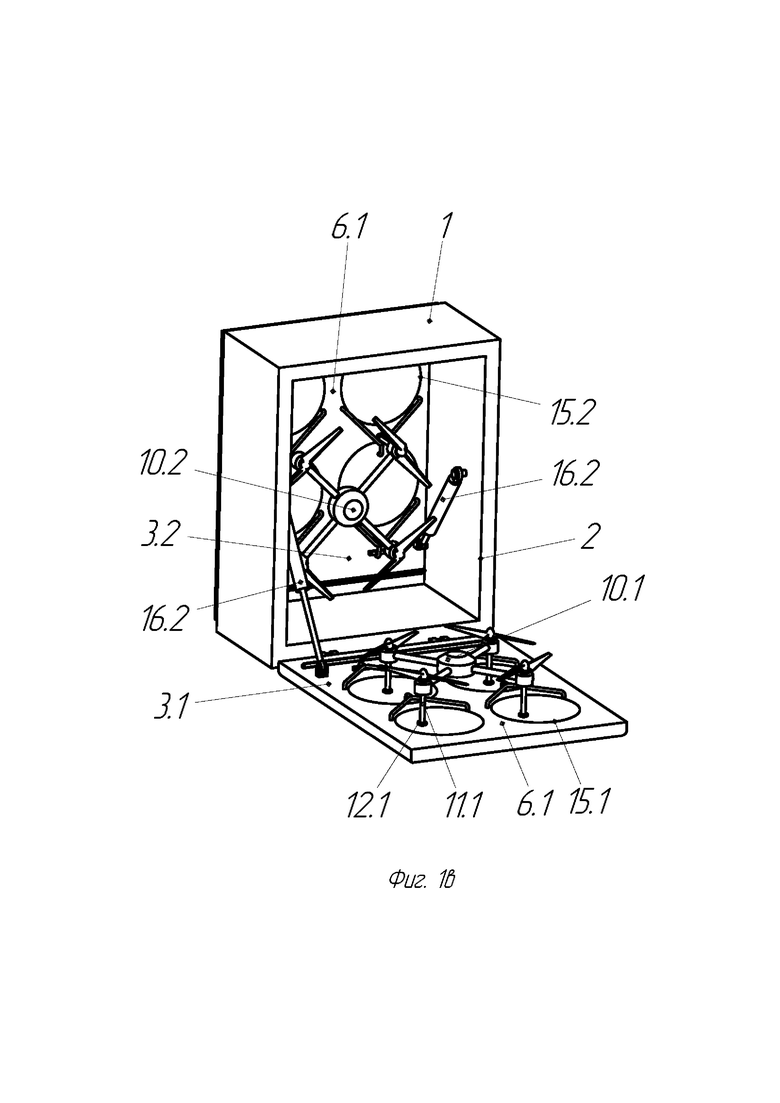
На фиг 1в изображен вариант исполнения автоматической станции зарядки и обслуживания беспилотных летательных аппаратов с двумя крышками.
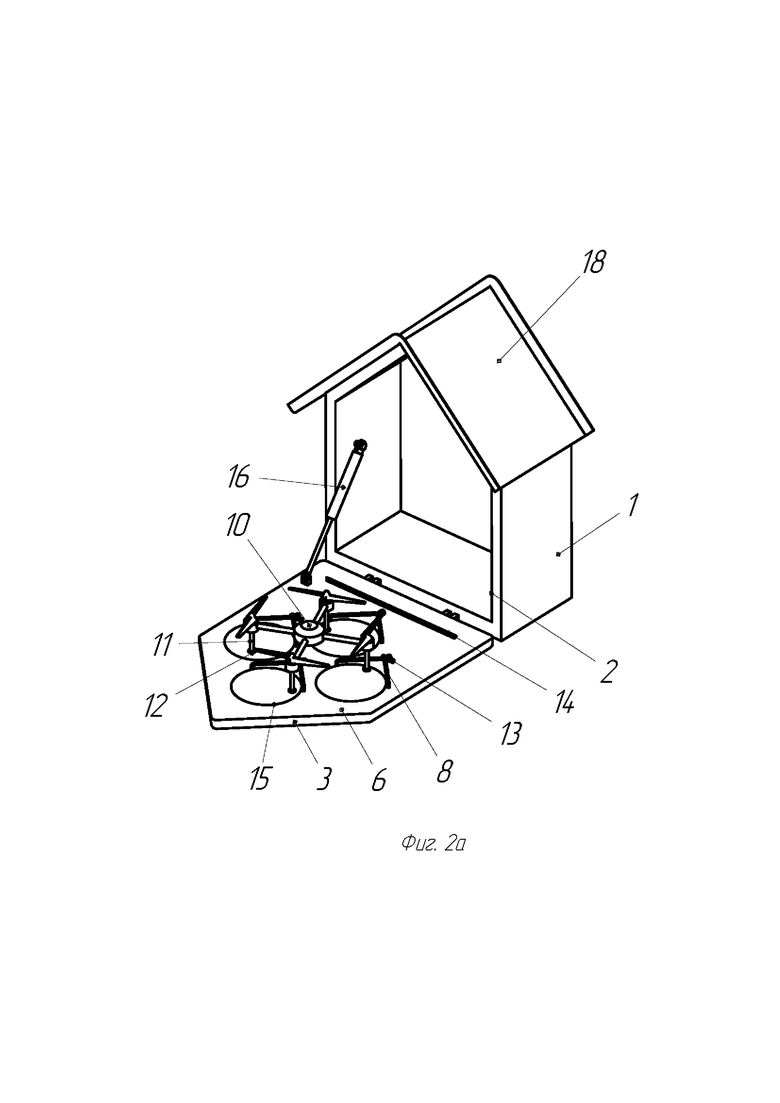
На фиг 2а изображен вариант исполнения автоматической станции зарядки и обслуживания беспилотных летательных аппаратов с открытой крышкой пятиугольной формы и приземленным на ее внутренней поверхности БПЛА.
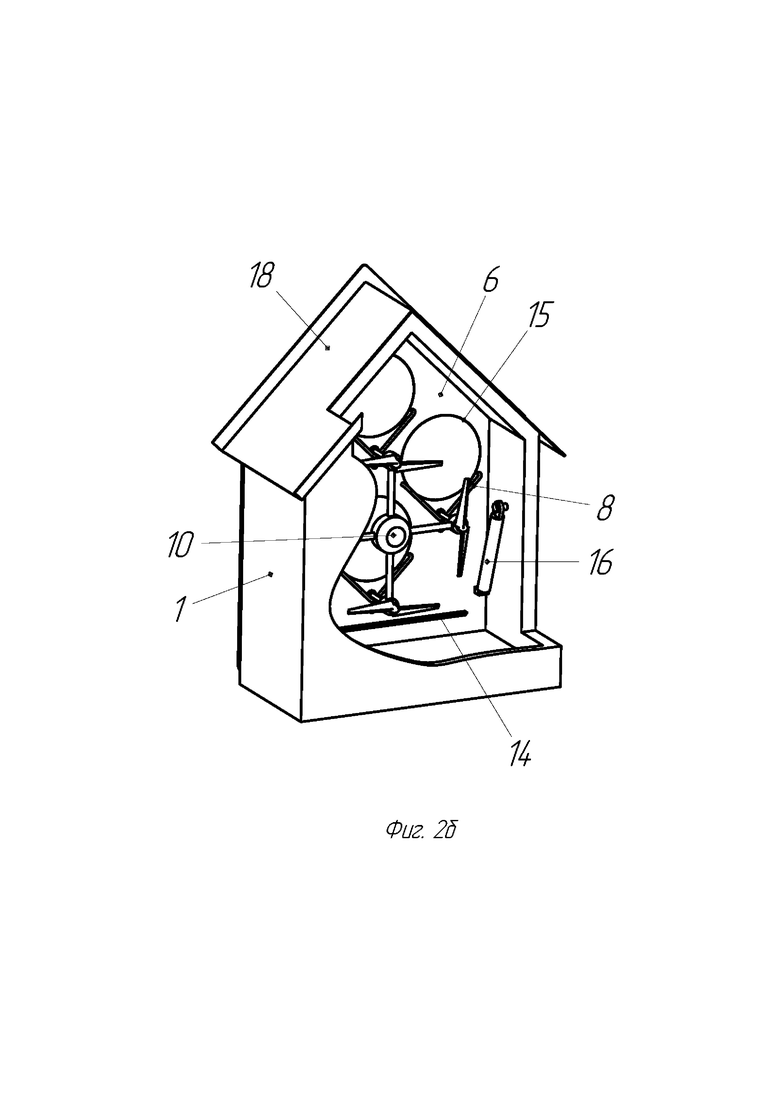
На фиг 2б изображен вариант исполнения автоматической станции зарядки и обслуживания беспилотных летательных аппаратов с закрытой крышкой пятиугольной формы позиционированным на ее внутренней поверхности БПЛА.
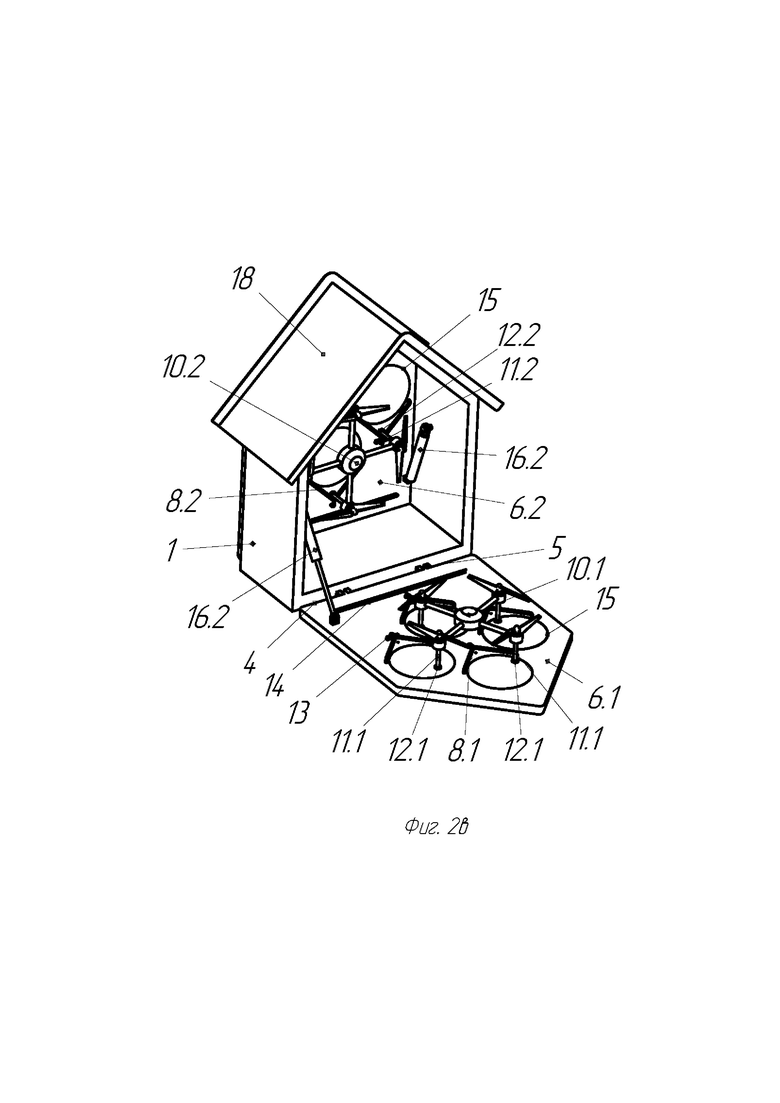
На фиг 2в изображен вариант исполнения автоматической станции зарядки и обслуживания беспилотных летательных аппаратов с двумя крышками пятиугольной формы.
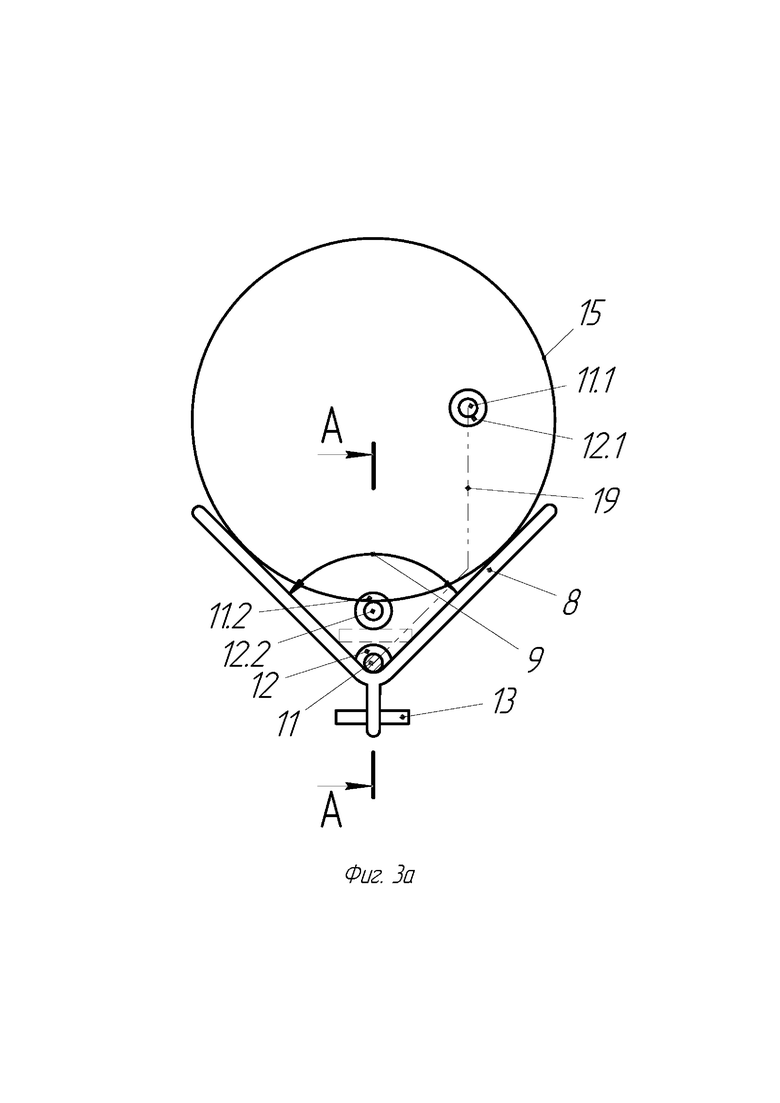
На фиг. 3а изображена направляющая, выполненная в виде буквы «V».
На фиг. 3б изображена направляющая, выполненная в виде буквы «V» сечение А-А фиг. За.
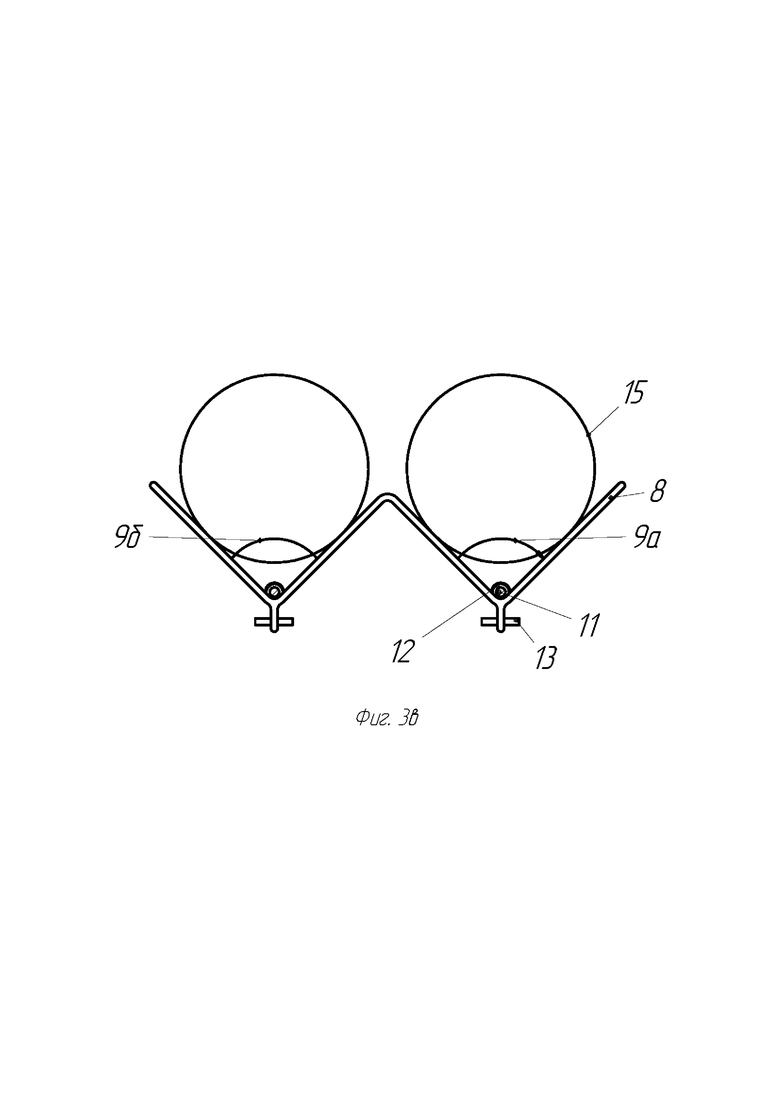
На фиг. 3в изображена направляющая, выполненная в виде буквы «W».
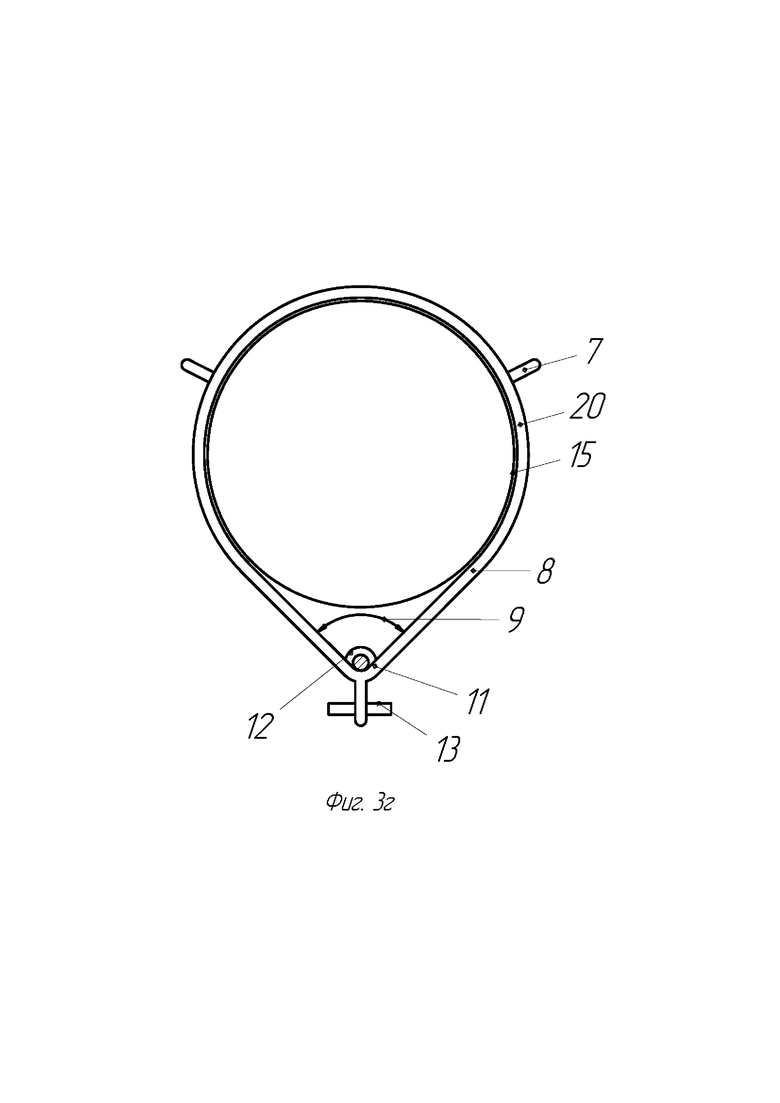
На фиг. 3г изображена направляющая, выполненная в форме капли.
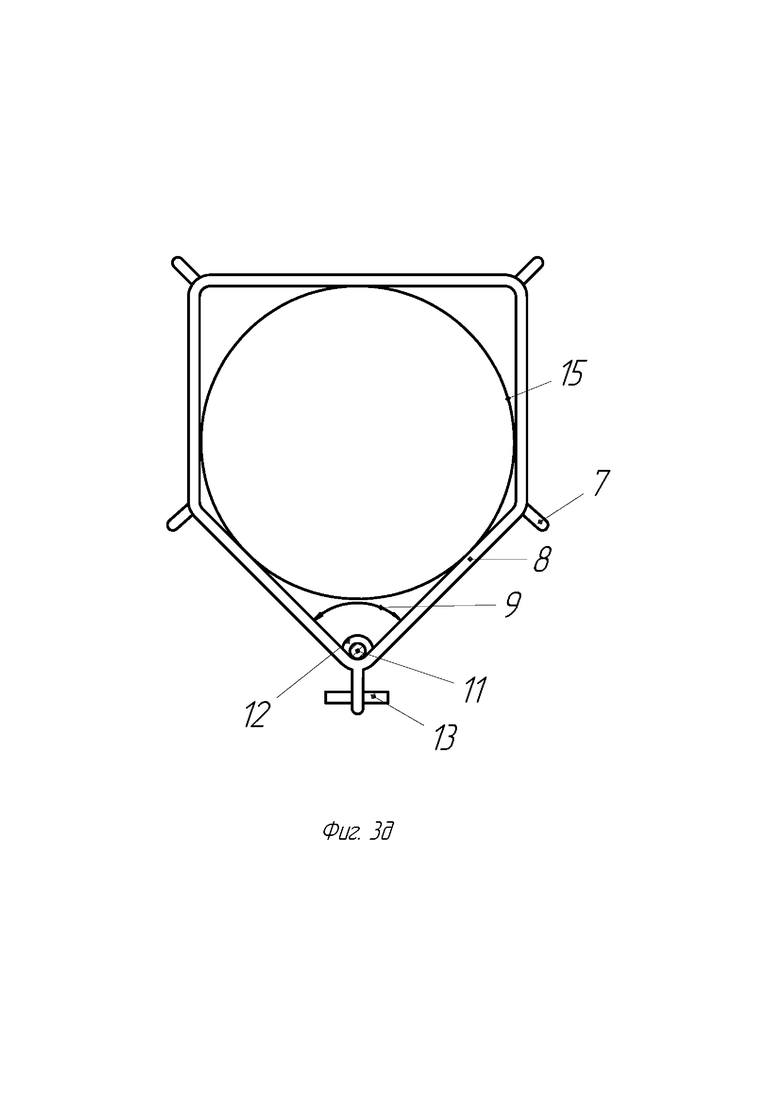
На фиг. 3д изображена направляющая, выполненная в форме пятиугольника.
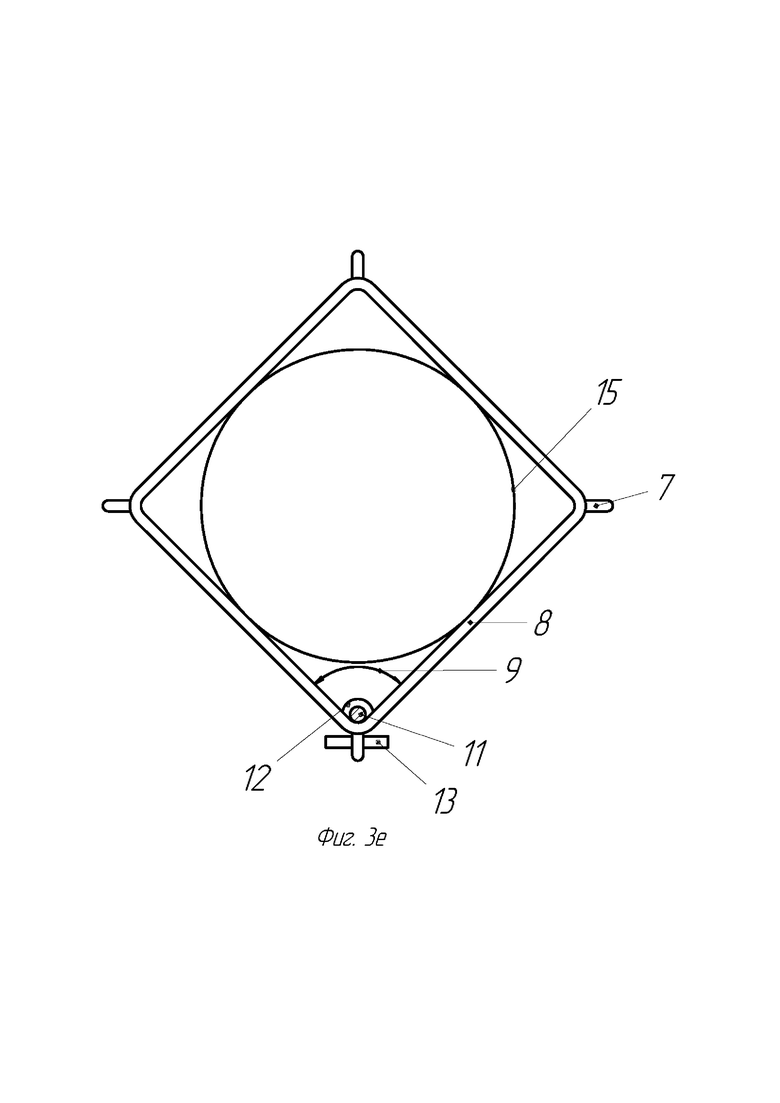
На фиг. 3е изображена направляющая, выполненная в форме ромба (квадрата).
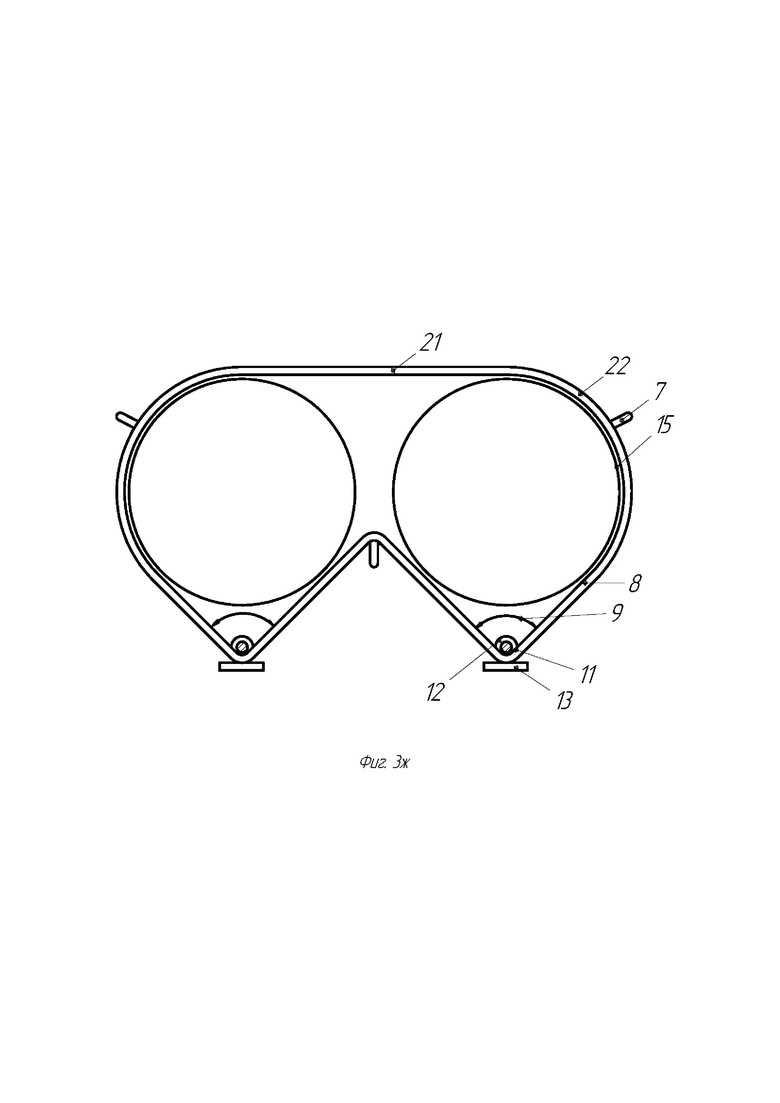
На фиг. 3ж изображена направляющая, выполненная в форме комбинации в виде буквы «W» и замыкающую линию, состоящую из прямого отрезка и дуг.
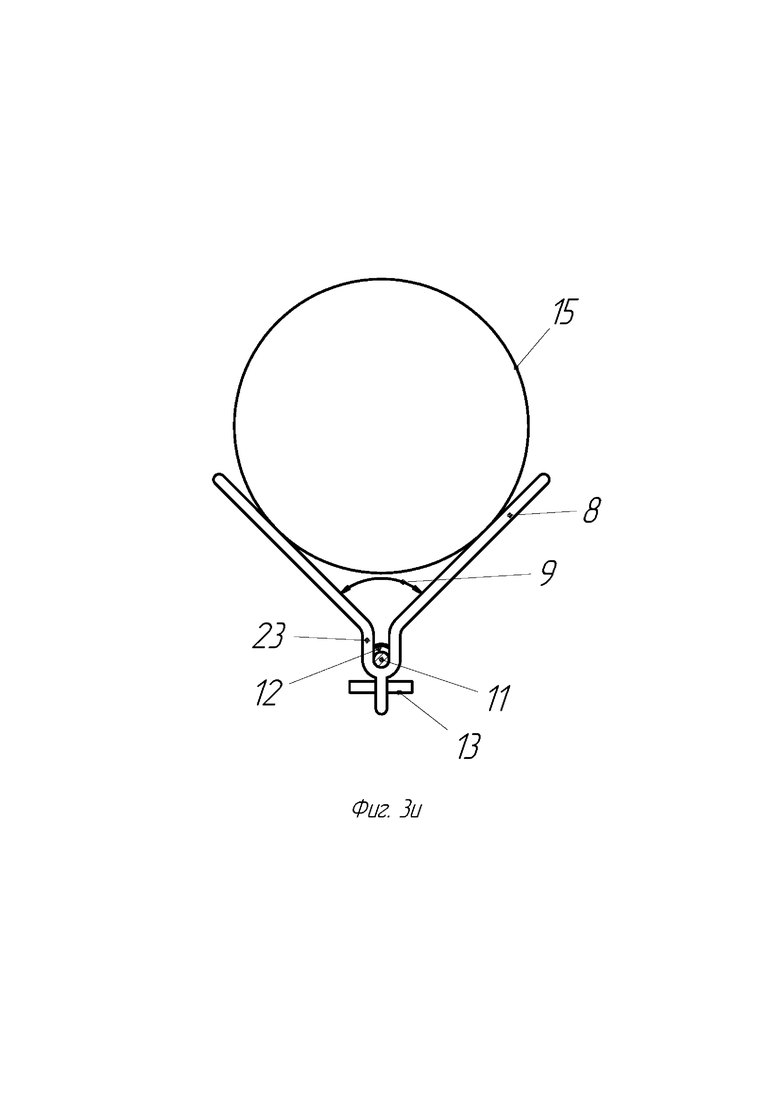
На фиг. 3и изображена направляющая, выполненная в виде буквы «V», вершина внутреннего угла которого выполнена в виде буквы «U».
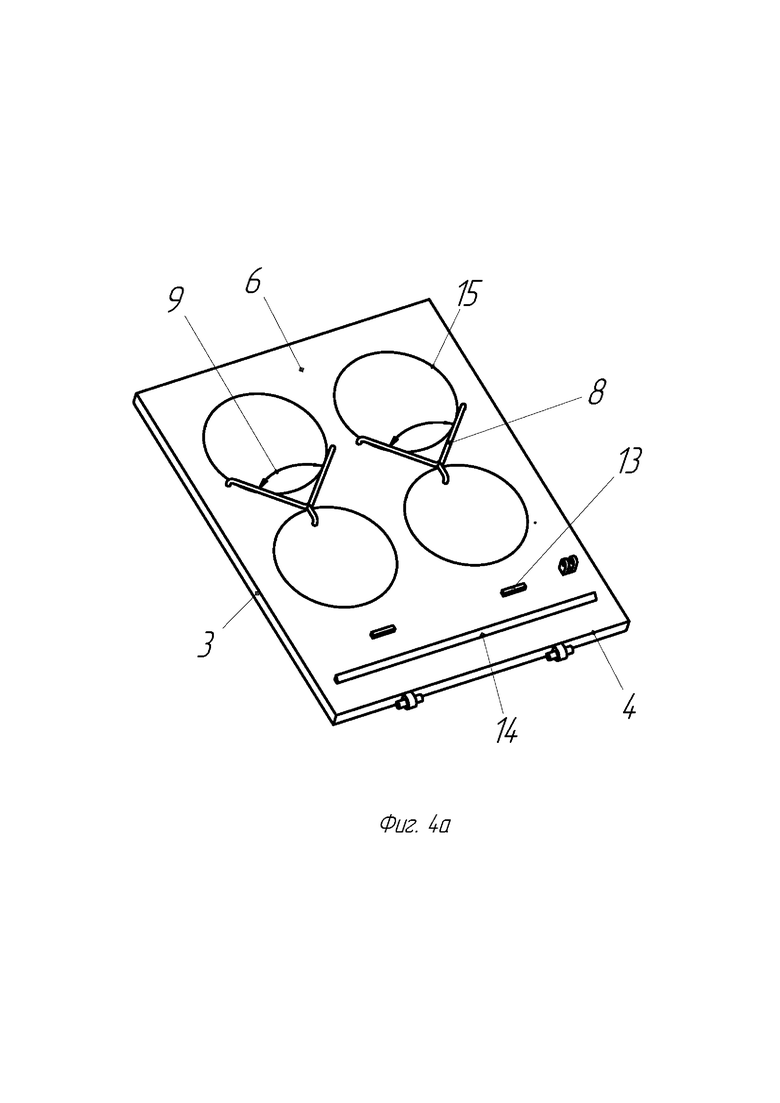
На фиг. 4а изображена крышка, на котором на одинаковом расстоянии от нижней кромки установлены две направляющие.
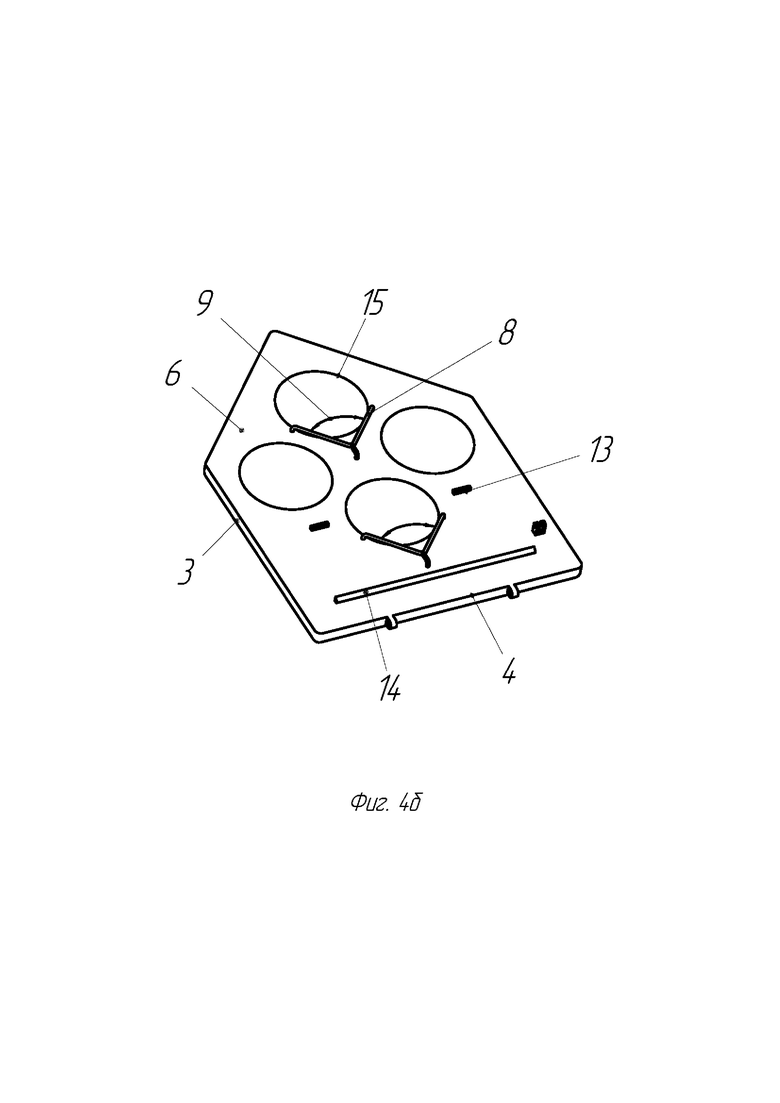
На фиг. 4б изображена крышка, на котором на одной линии перпендикулярной к нижней кромке крышки установлены два направляющих.
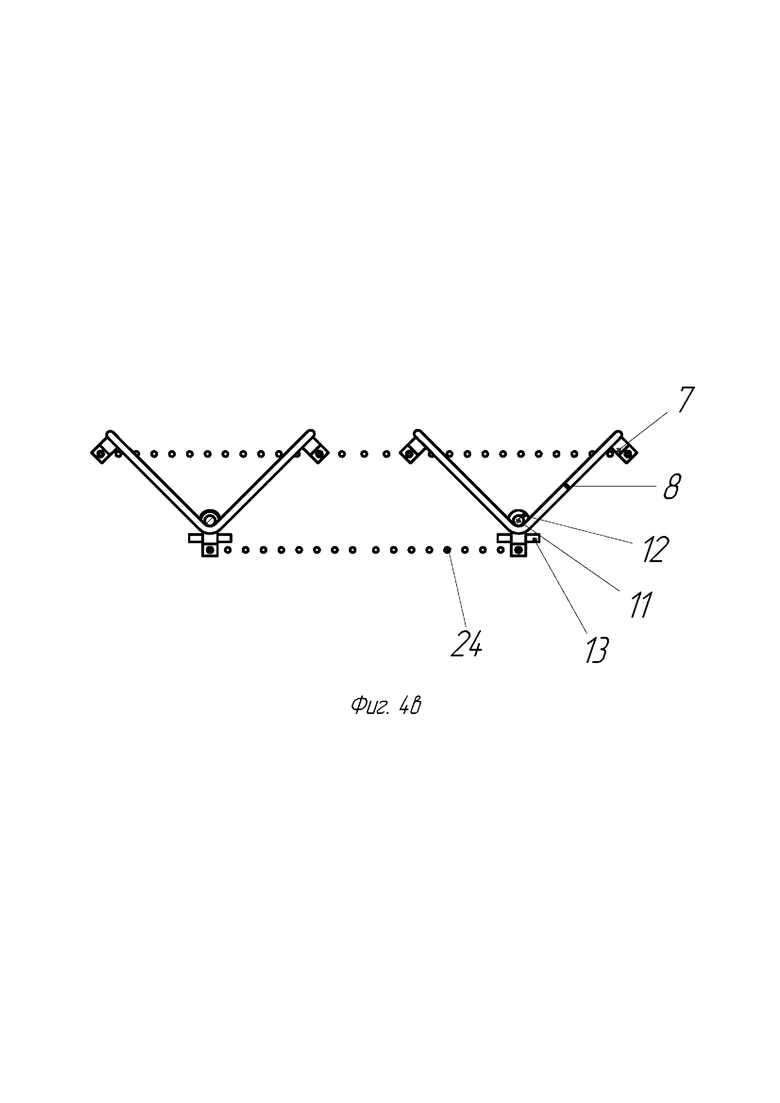
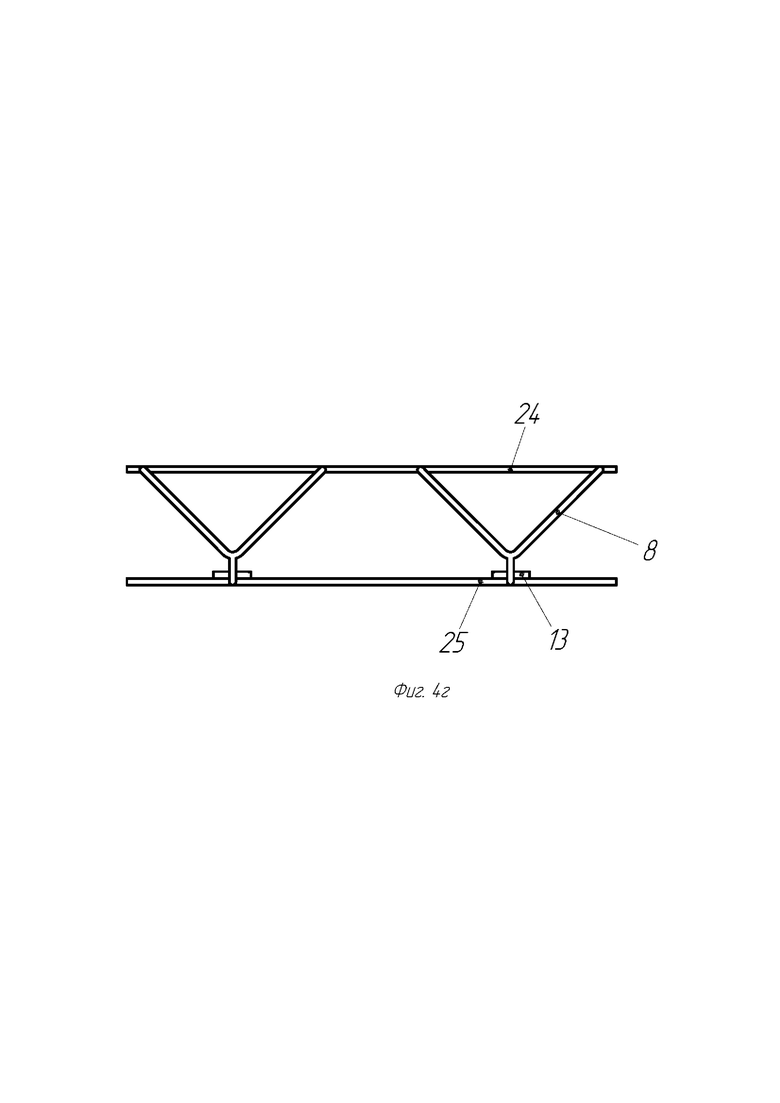
На фиг. 4в изображена крышка люка с местами крепления направляющих с различными расстояниями между ними.
На фиг. 4г изображена крышка люка с «Т»-образными пазами для крепления направляющих с различными расстояниями между ними.
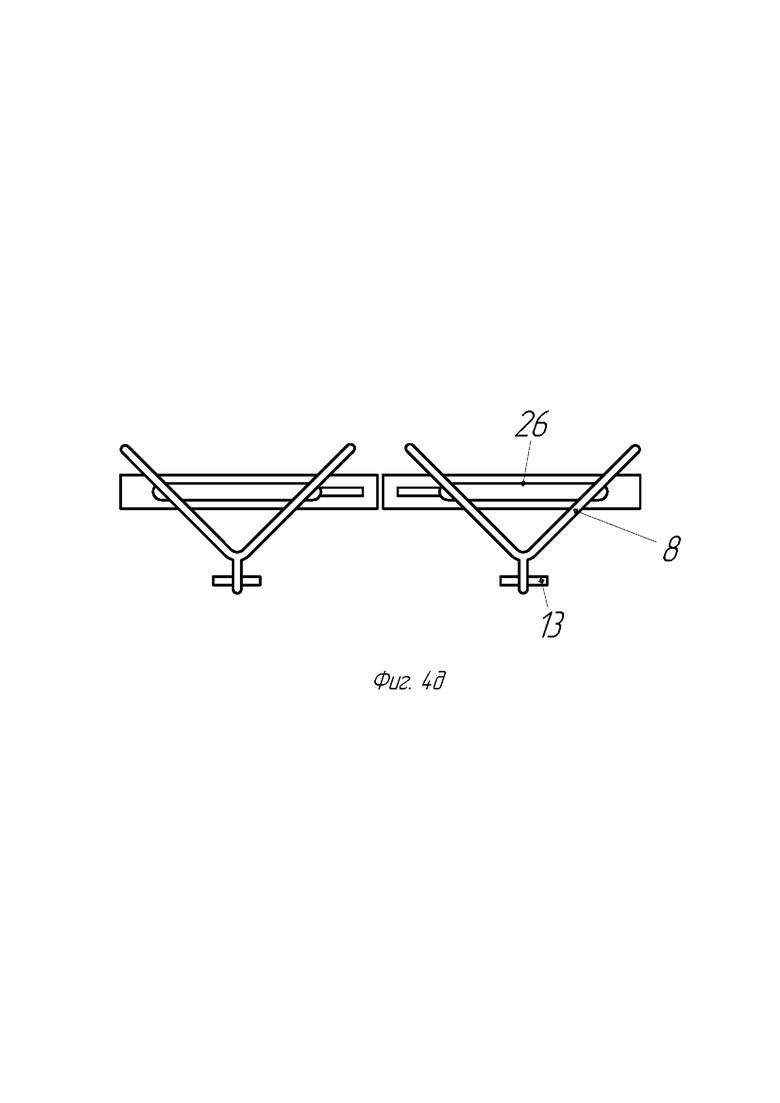
На фиг. 4д изображена крышка люка с установленными на нем линейными актуаторами, на которых установлены направляющие.
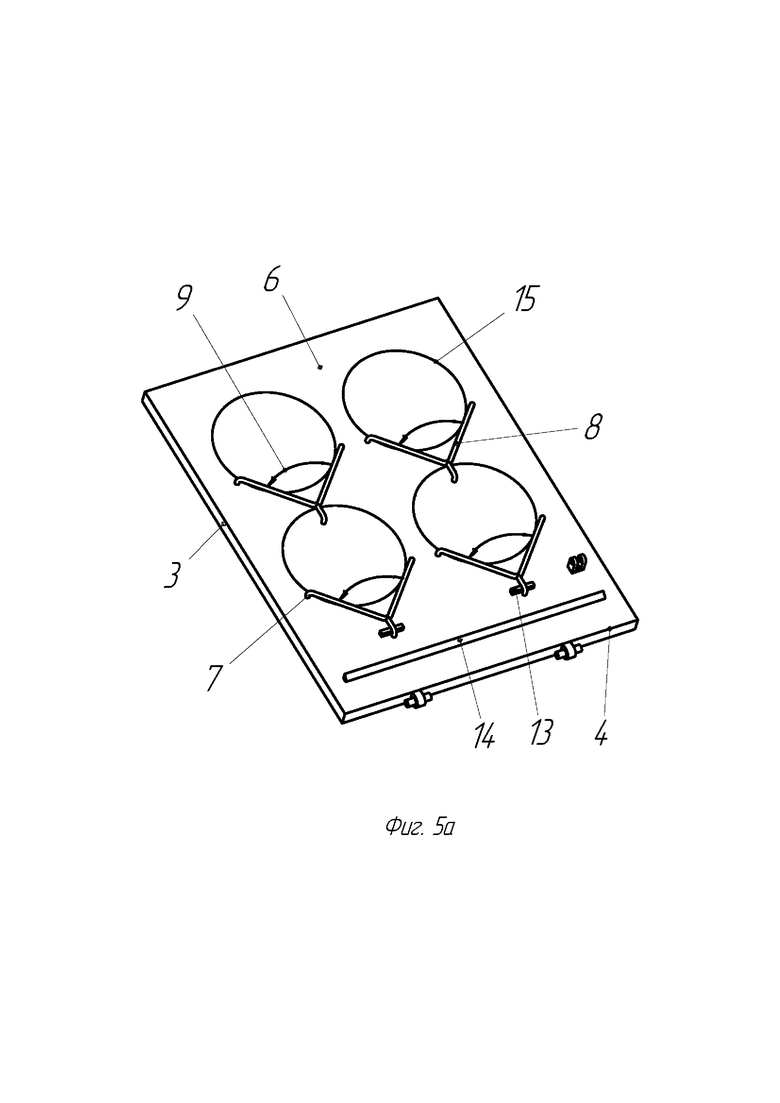
На фиг. 5а изображена крышка с четырьмя направляющими в виде буквы «V», установленными по углам квадрата, нижняя сторона квадрата параллельна нижней кромке крышки.
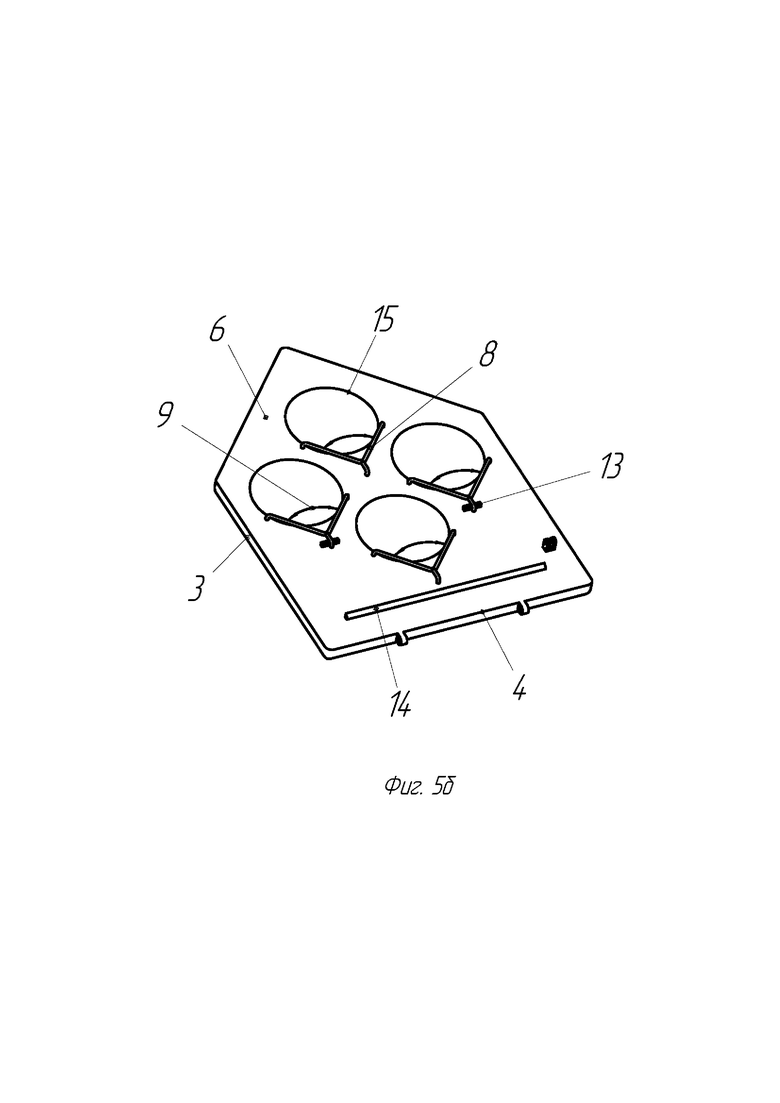
На фиг. 5б изображена крышка с четырьмя направляющими в виде буквы «V», установленными по углам квадрата, одна диагональ квадрата параллельна нижней кромке крышки.
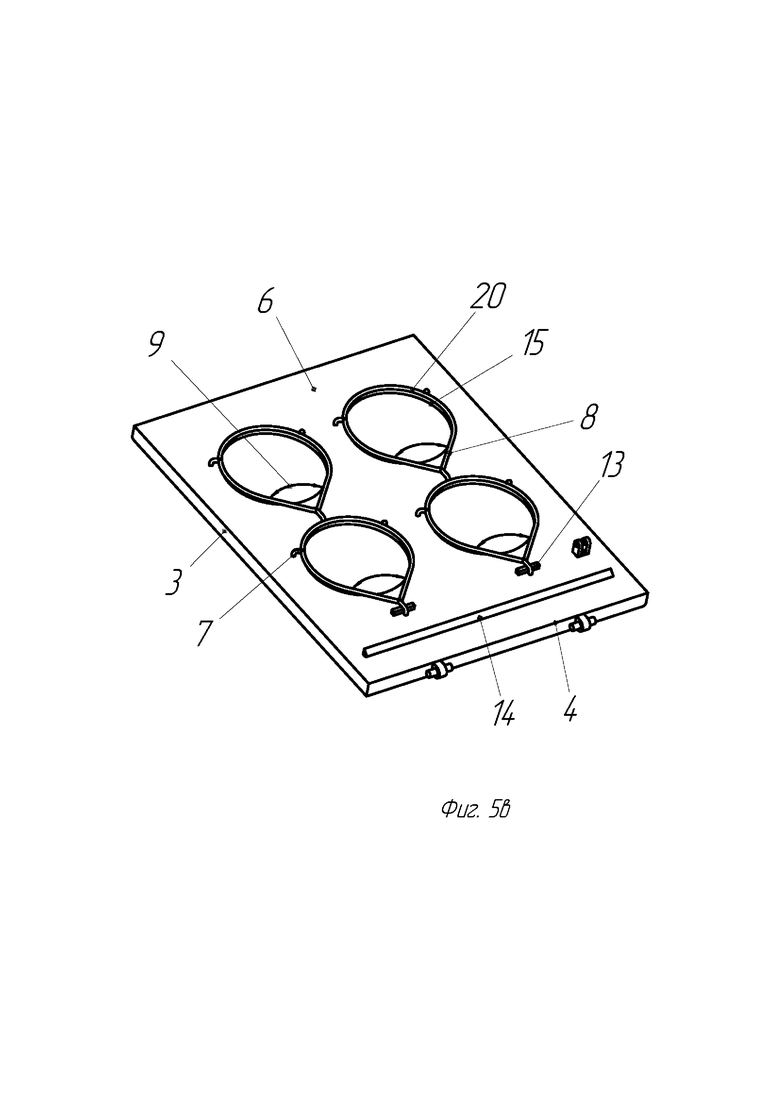
На фиг. 5в изображена крышка с четырьмя направляющими в форме капли, установленными по углам квадрата, нижняя сторона квадрата параллельна нижней кромке крышки.
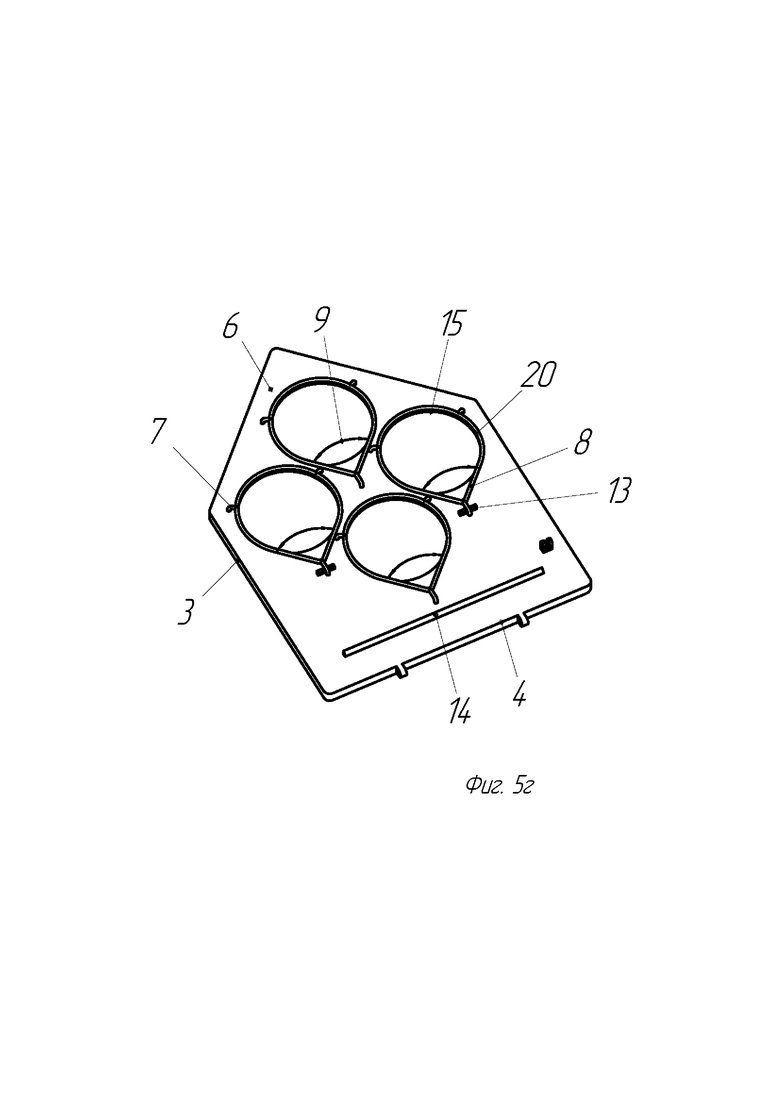
На фиг. 5г изображена крышка с четырьмя направляющими в форме капли, установленными по углам квадрата, одна диагональ квадрата параллельна нижней кромке крышки.
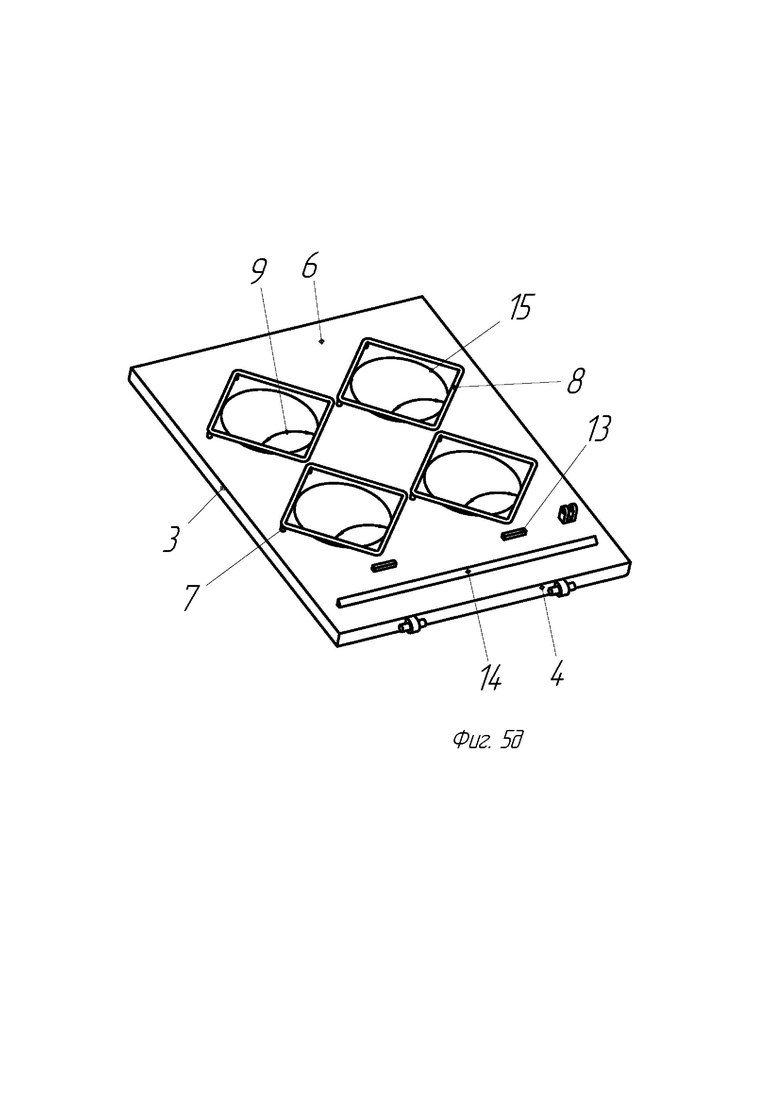
На фиг. 5д изображена крышка с четырьмя направляющими в форме ромба (квадрата), установленными по углам квадрата, нижняя сторона квадрата параллельна нижней кромке крышки.
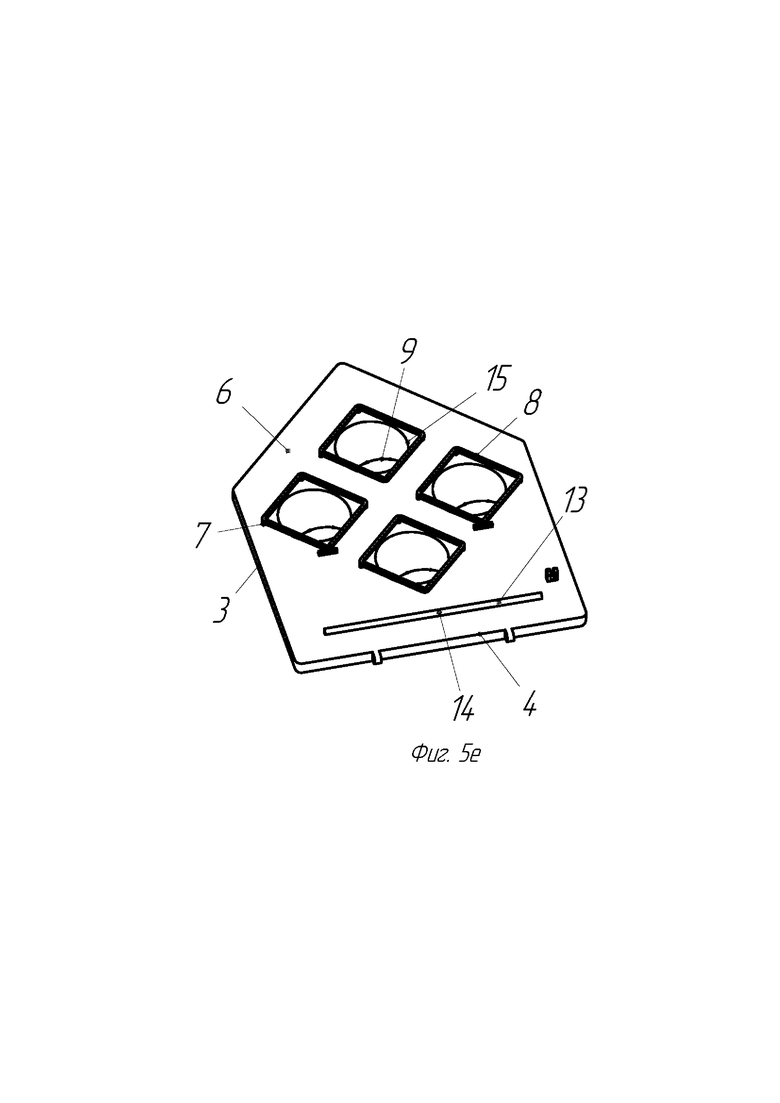
На фиг. 5е изображена крышка с четырьмя направляющими в форме ромба (квадрата), установленными по углам квадрата, одна диагональ квадрата параллельна нижней кромке крышки.
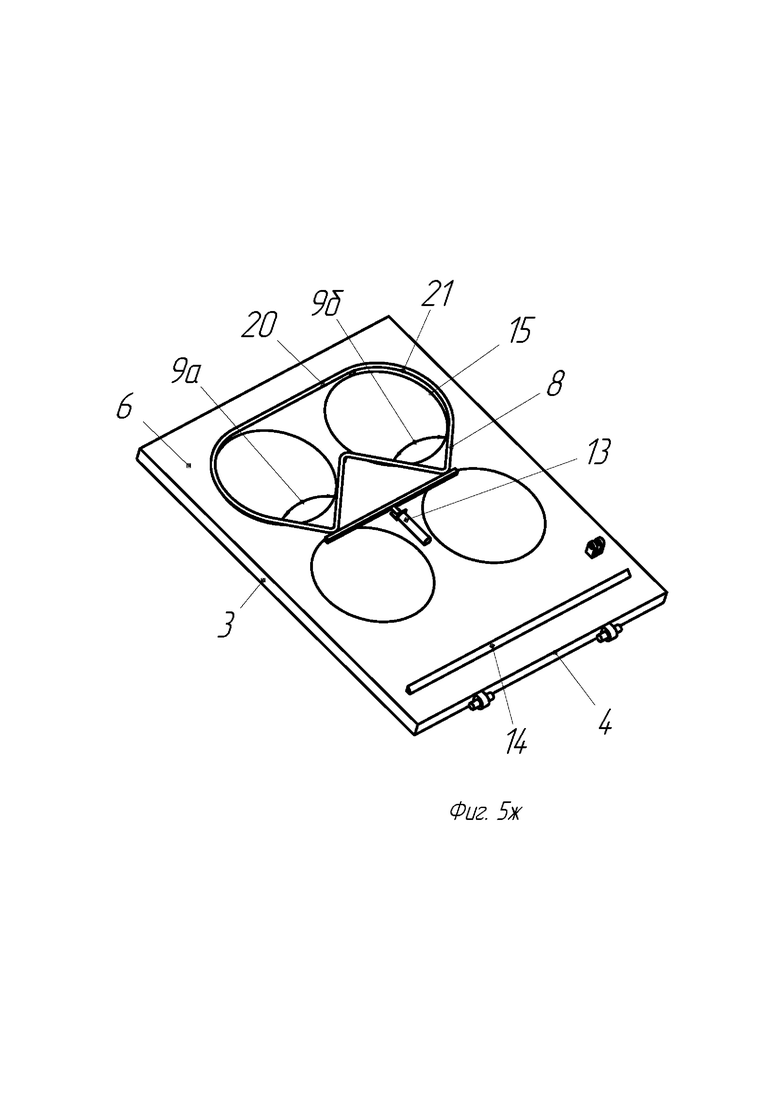
На фиг. 5ж изображена крышка с установленной направляющей замкнутого контура из комбинации в виде буквы «W» и замыкающей линии, состоящей из прямого отрезка и дуг.
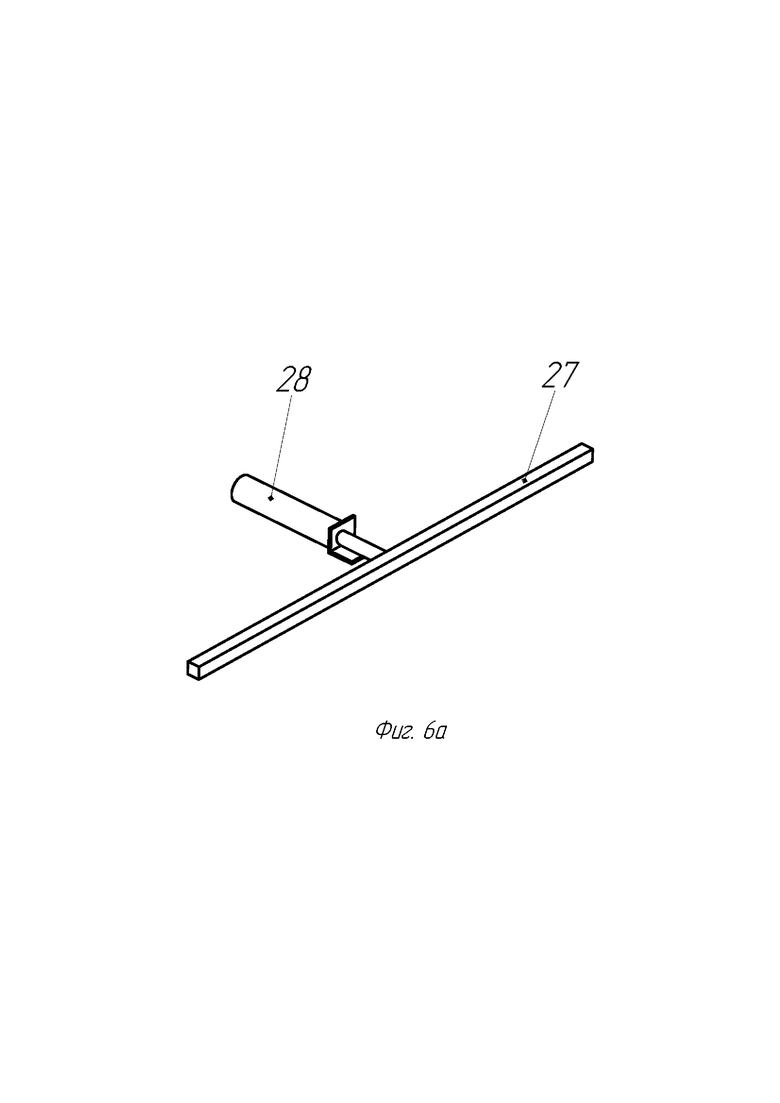
На фиг. 6а изображен толкатель с линейным приводом.
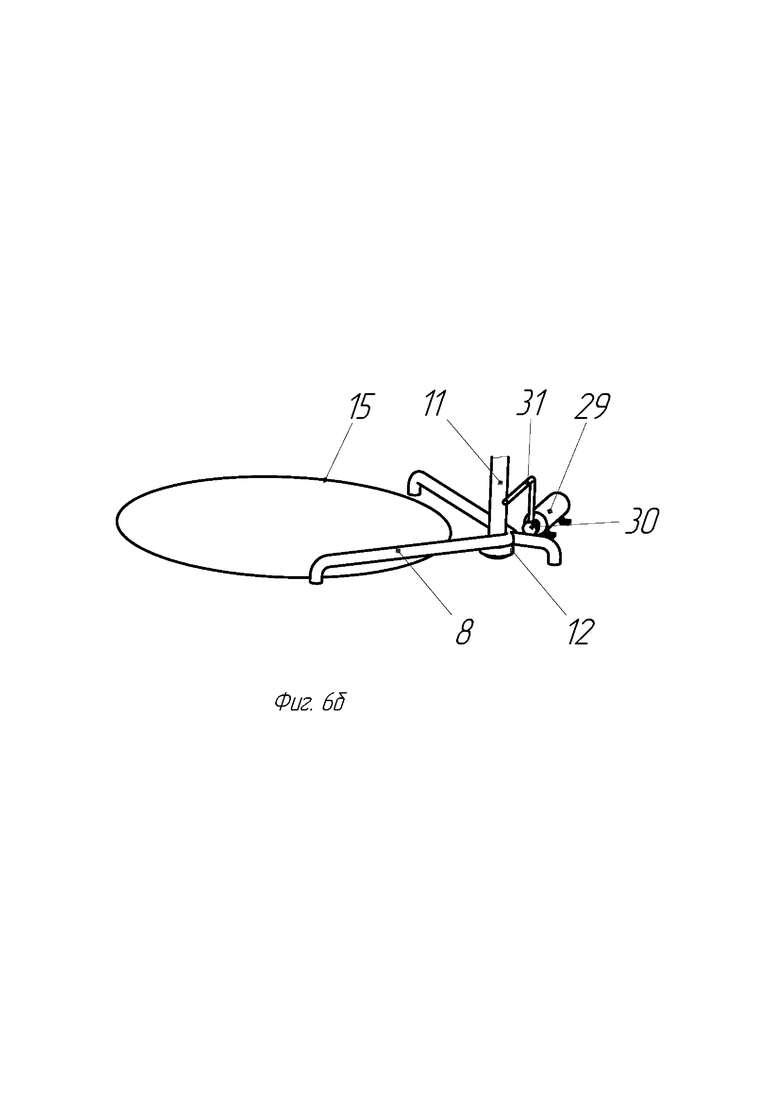
На фиг. 6б изображен толкатель с приводом вращения.
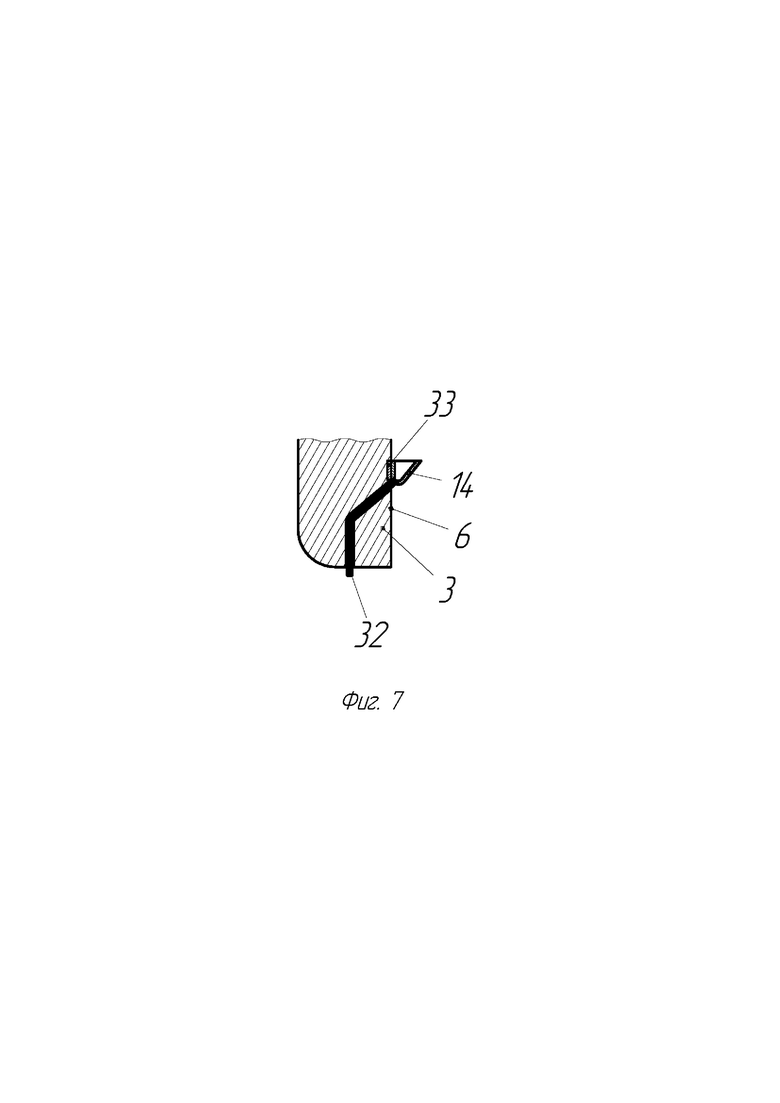
На фиг. 7 изображен желоб.
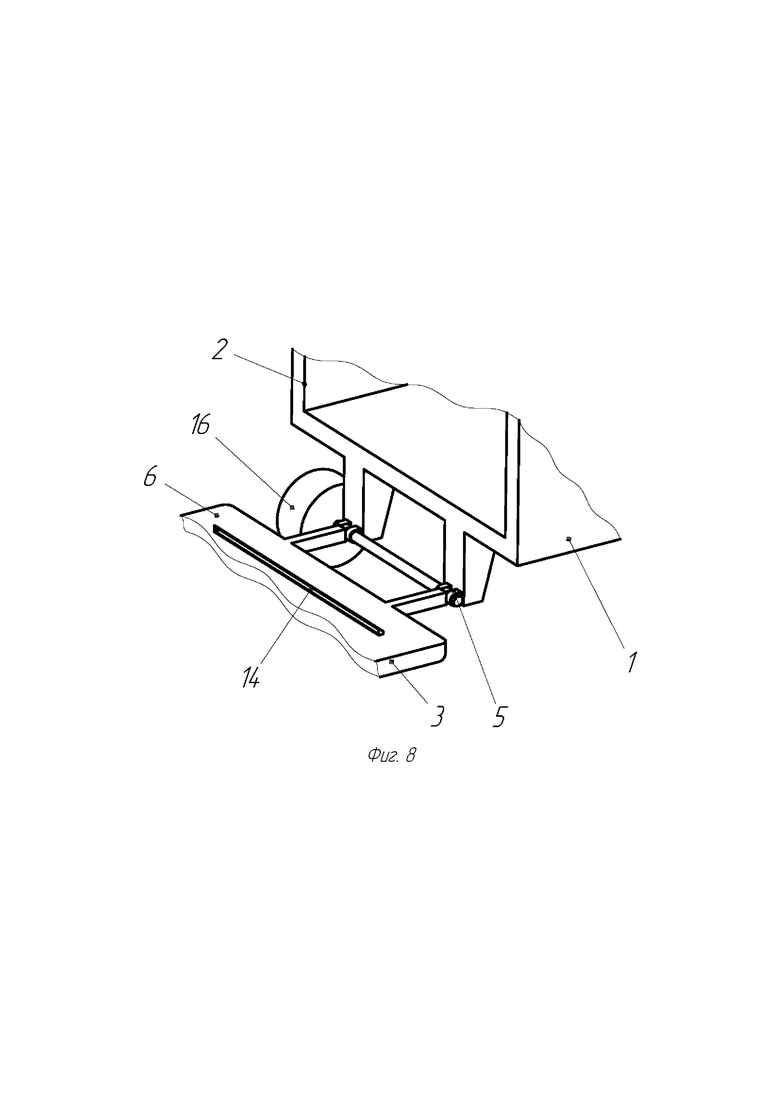
На фиг. 8 изображен механизм открывания и закрывания крышки люка.
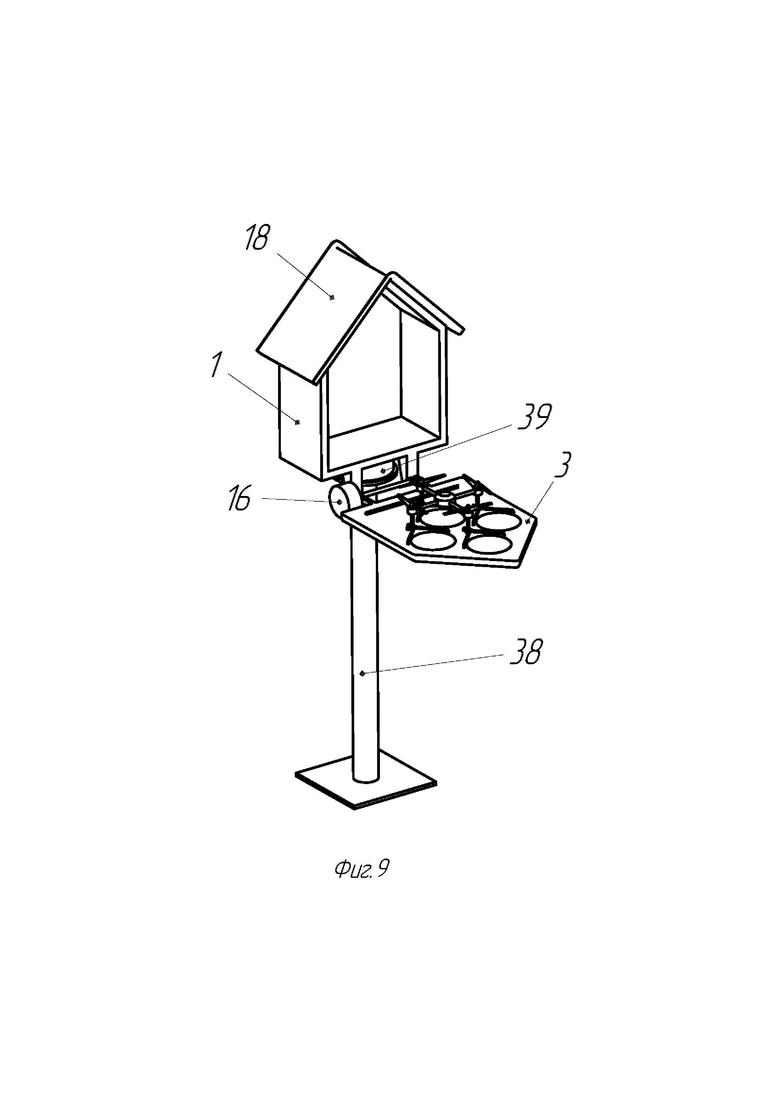
На фиг. 9 изображен вариант исполнения Автоматической станция зарядки и обслуживания беспилотных летательных аппаратов содержащий основание, на которое автоматическая станция установлена, с возможностью вращения вокруг вертикальной оси.
Указанные фигуры иллюстрируют частные случаи реализации и не охватывают или ограничивают весь объем вариантов реализации данного технического решения.
Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов фиг. 1а содержит корпус 1, выполненный на боковой стенке корпуса люк 2, крышку 3 люка 2 с установленными в нижней части 4 шарнирными петлями 5, на внутренней поверхности 6 крышки 3 люка 2 на опорах 7 установлено по меньшей мере два выполненных из прутка направляющих 8 в виде фигуры незамкнутого или замкнутого контура, содержащих по меньшей мере один внутренний угол 9, который направлен к нижней части 4 крышки 3 люка 2.
Поз. 10 показан приземлившийся на внутреннюю поверхность крышки БПЛА, поз. 11 обозначены опоры БПЛА 10, которые содержать в нижней части пятки 12, выполненные в виде низкого цилиндра диаметром большим диаметра опоры 11.
На внутренней поверхности крышки 3 люка 2 установлен по меньшей мере один толкатель 13, способный толкать одновременно не менее двух опор 11 БПЛА 10 в позиционированном состоянии. На фиг. 1а изображено два толкателя 13. На внутренней поверхности 6 крышки 3 люка в нижней части установлен желоб 14, который может быть обогреваемым.
На внутренней поверхности 6 крышки 3 люка 2 изображены круги 15, которые обозначают зону приземления каждой из опор БПЛА 10. Каждая опора 11 БПЛА 10 встала внутри своего круга 15. Данные круги 15 приведены для разъяснения работы автоматической станции и наличие их в реальной конструкции не обязательны.
Поз. 16 обозначен механизм открывания и закрывания крышки люка (поз. 16.1 и поз. 16.2, в случае использования двух крышек), который на фиг. 1а представлен в виде гидро-, пневмо-или электроцилиндр а, поз. 17 изображен пульт управления и зарядки аккумулятора БПЛА 10
На фиг. 16 изображена автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов фиг. 1а с задней стороны, с закрытой крышкой и позиционированным на ее внутренней поверхности БПЛА. В данном положении производится хранение, зарядка и обслуживание приземлившегося БПЛА 10.
Крышка 3 люка 2 закрыта и находится в вертикальном положении. Опоры 11 БПЛА 10 находятся на вершинах внутренних углов 9 направляющих 8 (поз. 8.1 и поз. 8.2 в случае использования двух крышек) таким образом, что пятки 12 (поз. 12.1 и поз. 12.2 при использовании двух крышек) расположены между внутренней поверхностью 6 крышки 3 люка 2 и направляющим 8 и таким образом БПЛА 10 позиционирован и висит на внутренней поверхности 6 крышки 3 люка 2.
На фиг 1в изображена автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов с двумя крышками 3.
Крышка 3.1 открыта и на ее внутренней поверхности 6.1 приземлен БПЛА 10.1, опоры 11.1 которого находятся внутри кругов 15.1, определяющих зону приземления опор 11.1 БПЛА 10.1.
Крышка 3.2 закрыта и находится в вертикальном положении. Опоры 11.2 БПЛА 10.2 находятся на вершинах внутреннего угла 9.2 направляющих 8.2 таким образом, что пяты 12.2 расположены между внутренней поверхностью 6.2 крышки 3.2 и направляющим 8.2 и таким образом БПЛА 10.2 позиционирован и висит на внутренней поверхности 6.2 крышки 3.2.
Вариант исполнения фиг 2а автоматической станции зарядки и обслуживания беспилотных летательных аппаратов содержит крышку 3 и люк 2 пятиугольной формы. Это позволяет использовать двускатную крышу 18 корпуса 1, на которой не задерживается дождевая вода и снег. Ориентация приземления БПЛА 10 в этом случае также другая.
На фиг 2б изображен вариант исполнения автоматической станции зарядки и обслуживания беспилотных летательных аппаратов фиг. 2а с закрытой крышкой 3 и позиционированным на ее внутренней поверхности 6 БПЛА 10. В данном положении производится хранение, зарядка и обслуживание приземлившегося БПЛА 10.
Крышка 3 люка 2 закрыта и находится в вертикальном положении. Опоры 11 БПЛА 10 находятся на вершинах внутреннего угла 9 направляющих 8 таким образом, что пяты 12 расположены между внутренней поверхностью 6 крышки 3 люка 2 и направляющим 8 и таким образом БПЛА 10 позиционирован и висит на внутренней поверхности 6 крышки 3 люка 2.
На фиг 2в изображен вариант исполнения автоматической станции зарядки и обслуживания беспилотных летательных аппаратов с двумя крышками 3 пятиугольной формы.
Крышка 3.1 открытая на ее внутренней поверхности 6.1 приземлен БПЛА 10.1, опоры 11.1 которого находятся внутри кругов 15.1, определяющих зону приземления опор 11.1 БПЛА 10.1.
Крышка 3.2 закрыта и находится в вертикальном положении. Опоры 11.2 БПЛА 10.2 находятся на вершинах внутреннего угла 9.2 направляющих 8.2 таким образом, что пяты 12.2 расположены между внутренней поверхностью 6.2 крышки 3.2 и направляющим 8.2 и таким образом БПЛА 10.2 позиционирован и висит на внутренней поверхности 6.2 крышки 3.2.
По аналогии могут быть изготовлены автоматические станции зарядки и обслуживания БПЛА 10 с тремя, четырьмя и более люками 2 и крышками 3, которые расположены на боковых стенках корпуса 1 для приема и облуживания трех и более БПЛА 10.
Направляющие 8 могут быть выполнены из прутка круглого, квадратного или прямоугольного сечения в виде фигуры незамкнутого или замкнутого контура, содержащего по меньшей мере один внутренний угол 9. Направляющие 8 должны быть установлены таким образом, что вершина внутреннего угла 9 направлена к нижней части 4 крышки люка 3.
Направляющая 8 незамкнутого контура может быть выполнена в виде букв «V», «W» или другого профиля, имеющего по меньшей мере один внутренний угол.
На фиг. 3а изображена направляющая 8, выполненная в виде буквы «V». Круг 15 определяет зону приземления опоры 11 БПЛА 10. Опора 11 после приземления отмечена поз. 11.1, пунктирная линия 19 определяет линию движения опоры 11 при закрывании крышки 3. Вертикальное направление линии движения 19 соответствует вертикальному скольжению опоры 11 при наклоне крышки 3, часть линии движения, направленная параллельно стороне направляющей 8, соответствует движению опоры 11 после прикасания к направляющей 8. Так же на фиг. 3а изображен БПЛА на взлетной позиции, когда толкатель 13 вытолкнул опоры 11 в положение, при котором пяты 12 не задевают направляющие 8. Опоры 11 во взлетном положении обозначены поз. 11.2, а пяты - поз. 12.2.
На фиг. 3б представлено расположение опоры 11 после позиционирования БПЛА 10 вид по сечению А-А фиг. 3а. Опора 11 касается вершины угла 9 направляющей 8, а пята 12 уходит под направляющую 8 и располагается между внутренней поверхностью 6 крышки 3 и направляющей 8. Такое расположение опоры 11 не позволяет ей выпасть из направляющей 8 и обеспечивает удерживание БПЛА 10 на внутренней поверхности 6 крышки 3, находящейся в вертикальном положении.
Направляющая 8 незамкнутого контура в виде буквы «W» (фиг. 3в) имеет два внутренних угла 9.1 и 9.1, и заменяет расположенные рядом направляющие 8 в виде буквы «V». При этом расстояние между вершинами внутренних углов 9 равно расстоянию между опорами 11 БПЛА 10.
Направляющая 8 незамкнутого контура в виде буквы «W» располагаются, ближе к нижней кромке 4 крышки 3, чем зоны приземления опор 11 БПЛА 10, которая определяется кругами 15 при этом боковые линии внутреннего угла 9 направляющих 8 касаются или несколько отступают от круга 15.
Направляющие 8 замкнутого контура могут быть выполнены в форме капли, или ромба, или квадрата и т.п.
Направляющая 8 замкнутого контура в форме капли (фиг. 3г) содержит установленный на опоры 7 внутренний угол 9 и касательное к нему кольцо 20, внутренний размер которого равен или больше круга 15, определяемого зону приземления опоры 11 БПЛА 10.
Направляющая 8 замкнутого контура в форме пятиугольника (фиг. 3д) содержит пять внутренних углов 9, один из которых направлен к нижней части 4 крышки 3. Внутренний размер пятиугольника должен вмещать в себя круг 15, определяющий зону приземления опоры 11 БПЛА 10.
Направляющая 8 замкнутого контура в форме ромба (квадрата) (фиг. 3е) содержит четыре внутренних угла 9, один из которых направлен к нижней части 4 крышки 3. Внутренний размер ромба (квадрата) должен вмещать в себя круг 15, определяющий зону приземления опоры 11 БПЛА 10.
Направляющая 8 замкнутого контура фиг. 3ж содержит комбинацию в виде буквы «W», которая задает два внутренних угла 9.1 и 9.2 и замыкается линией, состоящей из прямого отрезка 21 и дуг 22 концентричных кругу 15, определяющую зону приземления опоры 11 БПЛА 10. Концентрические дуги 22 выполнены равными или больше круга 15, расстояние между вершинами углов буквы «W» равно расстоянию между опорами 11.1, 11.2 БПЛА 10.
На фиг. 3и изображена направляющая 8, выполненная в виде буквы «V», вершина внутреннего угла 9 которых выполнена в виде буквы «U». Направляющая 8 содержит опоры 7, внутренний угол 9, вершина 23 которого выполнена в виде буквы «U». Такое выполнение вершины угла повышает угол контакта опоры 11 с вершиной угла и повышает надежность фиксации БПЛА 11. Подобным образом может быть выполнена вершина 23 угла 9 всех направляющих 8 фиг 3а... 3и.
Направляющая 8 должна быть изготовлена из материала имеющего малый коэффициент трения с материалом опор 11 БПЛА.
Направляющие 8 могут быть выполнены из электропроводного материала, изолированы друг от друга и подключены к выходу зарядного устройства. Также четыре изолированных направляющих 8 могут быть использованы для зарядки аккумулятора и передачи информации на бортовой компьютер БПЛА (два силовых, два информационных канала). Соответственно на опорах 11 БПЛА в зоне контакта с направляющими 8 должны быть размещены кольцевые контакты из электропроводного материала, которые должны быть соединены с соответствующими линиями на БПЛА 10.
Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов может содержать от двух до общего количества опор принимаемого БПЛА направляющих 8, выполненных в виде буквы «V», в форме капли, ромба (квадрата), пятиугольника.
Две направляющие 8 могут быть установлены на одинаковом расстоянии от нижней кромки 4 крышки 3 люка 2 (фиг. 4а), при этом расстояние между вершинами внутренних углов 9 равны расстоянию между опорами 11 БПЛА 10.
Две направляющие 8 могут быть установлены на одной прямой перпендикулярной к нижней кромке 4 крышки 3 люка 2, при этом расстояние между вершинами внутренних углов 9 равны расстоянию между опорами 11 БПЛА 10 (фиг. 4б).
Расстояние между направляющими 8 может регулироваться в зависимости от размера принимаемого БПЛА 10. Это может осуществляться путем переустановки направляющих 8 на заранее выполненные элементы крепления 24, например, резьбовые отверстия, которые определяют новые местоположения направляющих 8 (фиг. 4в). Места крепления могут быть установлены с возможностью перемещения, например на «Т»-образные пазы 25 (фиг. 4г). Также возможна установка направляющих 8 на линейные актуаторы 26 (фиг. 4д).
Четыре направляющие 8, выполненные в виде буквы «V», могут быть установлены на внутреннюю поверхность 6 прямоугольной крышки 3 таким образом, что вершины внутренних углов 9 образуют вершины квадрата, две стороны которого расположены параллельно нижней части 4 крышки 3. При этом стороны внутреннего угла 9 расположены касательно к кругам 15, определяющим зону приземления опоры 11 БПЛА 10 (фиг. 5а).
Четыре направляющие 8, выполненные в виде буквы «V», могут быть установлены на внутреннюю поверхность 6 пятиугольной крышки 3 таким образом, что вершины внутренних углов 9 образуют вершины квадрата, одна из диагоналей которого расположена параллельно нижней части 4 крышки 3. При этом стороны внутреннего угла 9 расположены касательно к кругам 15, определяющим зону приземления опоры 11 БПЛА 10, (фиг. 5б).
Четыре направляющие 8, выполненные в форме капли, могут быть установлены на внутреннюю поверхность 6 прямоугольной крышки 3 таким образом, что вершины внутренних углов 9 образуют вершины квадрата, две стороны которого расположены параллельно нижней части 4 крышки 3. При этом кольцо 20, соосно кругу 15, определяющего зону приземления опоры 11 БПЛА 10 (фиг. 5в).
Четыре направляющие 8 выполненных в форме капли, могут быть установлены на внутреннюю поверхность 6 пятиугольной крышки 3 таким образом, что вершины внутренних углов 9 образуют вершины квадрата, одна из диагоналей которого расположена параллельно нижней части 4 крышки 3. При этом кольцо 20, соосно кругу 15, определяющего зону приземления опоры 11 БПЛА 10 (фиг. 5г).
Четыре направляющие 8, выполненные в форме ромба (квадрата), могут быть установлены на внутреннюю поверхность 6 прямоугольной крышки 3 таким образом, что вершины внутренних углов 9, расположенных со стороны нижней кромки 4 крышки 3, образуют вершины квадрата, две стороны которого расположены параллельно нижней части 4 крышки 3. При этом центр ромба (квадрата) совпадает с центром круга 15, определяющего зону приземления опоры 11 БПЛА 10 (фиг. 5д).
Четыре направляющие 8, выполненные в форме ромба (квадрата), могут быть установлены на внутреннюю поверхность 6 пятиугольной крышки 3 таким образом, что вершины внутренних углов 9, расположенных со стороны нижней кромки 4 крышки 3, образуют вершины квадрата, одна из диагоналей которого расположена параллельно нижней части 4 крышки 3. При этом центр ромба (квадрата) совпадает с центром круга 15, определяющего зону приземления опоры 11 БПЛА 10 (фиг. 5е).
Направляющие 8 в вариантах исполнения 5а…5е могут быть установлены с возможностью перемещения по диагонали позволяет принимать БПЛА 10 с различным расстоянием между опорами 11. Для этого может быть использован один из способов установки направляющих, представленных на фиг. 4в, 4г, 4д.
Расстояние между четырьмя установленными по вершинам квадрата направляющими 8 может регулироваться в зависимости от размера принимаемого БПЛА 10 путем перемещения их по диагонали квадрата их расположения. Это может осуществляться путем переустановки направляющих 8 на заранее выполненные элементы крепления 24, например, резьбовые отверстия, которые определяют новые местоположения направляющих 8. Места крепления могут быть установлены с возможностью перемещения, например на «Т»-образные пазы 25. Также возможна установка направляющих 8 на линейные актуаторы 26, установленных соосно диагоналям квадрата расположения опор.
Направляющая 8 замкнутого контура (фиг. 3ж), которые содержат комбинацию в виде буквы «W», которая задает два внутренних угла 9.1 и 9.2 и замыкается линией, состоящей из прямого отрезка 20 и дуг 21, может быть установлена на внутреннюю поверхность 6 прямоугольной крышки 3 таким образом, что вершины внутренних углов расположены на равном расстоянии от нижней части 4 крышки 3. При этом концентрические дуги 21 установлены соосно кругу 15, определяющего зону приземления опоры 11 БПЛА 10 (фиг. 5ж).
Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов содержит по меньшей мере один толкатель 13, который толкает одновременно по меньшей мере две опоры 11 БПЛА 10 (фиг. 5ж), два (фиг. 1а) толкателя 13 для двух опор 11 БПЛА 10 и так далее до количество опор 11 принимаемого БПЛА 10 (изображение отсутствует).
Вариант исполнения толкателя 13 фиг. 6а, который используется в варианте исполнения автоматической станции фиг. 5ж, содержит толкающий элемент 27, длина которого больше межосевого расстояния опор 11 БПЛА 10, что достаточно для толкания двух симметрично расположенных относительно корпуса БПЛА 10 опор 11 и линейный привод 28, выполненный в виде гидро- или пневмоцилиндра, или актуатора линейного перемещения. Толкатель 13 установлен ниже направляющей 8 таким образом, чтобы при позиционированном положении БПЛА 10 толкающий элемент не задевал пят 12 опор 11 (см. фиг. 3а, 3б), который касается вершины угла 9. Ход толкателя 13 должен гарантировать выдвижение опор 11 до взлетной позиции (опора 12.2 фиг. 3а) находясь на котором БПЛА 10 может взлетать без риска задевания пятами 12 направляющих 8.
Варианты исполнения толкателей под индивидуальные опоры 11 отличается только шириной толкающего элемента 27.
Вариант исполнения толкателя фиг. 66 содержит установленный на привод 29 вращения с горизонтальной осью вращения на ступице 30 рычаг 31. Данный толкатель 13 движет свой рычаг 31 над направляющей 8 и толкает БПЛА 10 непосредственно в опоры 11.
Желоб 14 установлен на внутренней поверхности 6 крышки 3 со стороны нижней кромки 4 таким образом, что при закрытой крышке 3 представляет собой длинный сосуд и должен быть установлен на внутренней поверхности 6 герметично. Желоб имеет канал для слива 32 накопившейся влаги наружу. Как желоб 14, так и канал 32 могут иметь обогревательные элементы 33, которые должны гарантировать не замерзание воды, протекающей через желоб 14 канал 32 (фиг. 7), в холодное время года.
Механизм 16 открывания и закрывания крышки 3 люка 2 может быть выполнен в виде гидро-, пневмо- или электроцилиндра, установленного одним концом на корпус 1, другим на крышку 3 (фиг. 1а). Также механизм 16 открывания и закрывания крышки 3 (фиг. 8) может быть выполнен в виде привода вращения, на вал которого своими половинками шарниров насажена крышка.
Пульт управления и зарядки аккумулятора 17 содержит управляющий механизмами контроллер и зарядное устройство.
Вариант исполнения автоматической станции фиг. 9 содержит основание 38, на которое установлен привод вращения 39, обеспечивающий поворот корпуса 1 относительно вертикальной оси. Это позволяет ориентировать станцию и выбирать для приземления и взлета БПЛА 10 наиболее удачное положение относительно ветра.
Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов вариант исполнения фиг. 1а работает следующим образом.
В исходном состоянии крышка 3 люка 2 закрыта. В корпусе 1 автоматической станции отсутствует БПЛА 10.
БПЛА 10 подлетает к автоматической станции по GPS или заложенной в памяти карте и зависает над станцией. Автоматическая станция открывает крышку 3 люка 2 для чего выдвигается шток механизма 16 открывания и закрывания люка, выполненного в виде гидро-, пневмо- или электроцилиндра, который толкает крышку 3 люка 2 и приводит ее в горизонтальное положение.
БПЛА 10 приземляется на внутреннюю поверхность 6 крышки 3 люка 2 ориентируясь по изображению крышки 3 люка 2 или установленных на нем маркерам (не показаны). Вследствие ошибок управления и условии окружающей среды (ветер, особенно порывистый, видимость) БПЛА 10 приземляется с некоторой ошибкой. При этом важно, чтобы каждая опора 11 попала в соответствующий круг 15, изображенный на крышке 3 люка 2.
После приземления БПЛА 10 автоматическая станция закрывает крышку 3 люка 2 для чего задвигается шток механизма 16 открывания и закрывания, выполненного в виде гидро-, пневмо- или электроцилиндра и который тянет люк и приводит его в вертикальное положение. При этом в следствии появившегося наклона крышки 3 опоры 11 БПЛА 10 скользят по внутренний поверхности 6 крышки 3 люка 2 в сторону нижней части люка (линия движения опоры 19 фиг. 3а) сначала вниз (перпендикулярно нижней кромке 4) по наклонной внутренней поверхности 6 люка 2, затем касается направляющей 8 и скользит вдоль нее до подхода к вершине внутреннего угла 9. При этом пятка 12 опор 11 БПЛА 10 заходит под направляющую 8. Это позволяет удерживать БПЛА 10 от падения при вертикальном положении крышки 3 люка 2. В таком положении происходит хранение, обслуживание (обмен информации) или зарядка аккумулятора БПЛА 10 (фиг. 1б).
В случае если направляющие 8 выполнены из электропроводного материала, а на опорах 11 БПЛА 10 выполнены соответствующие контакты - автоматическая станция позволяет производить зарядку аккумуляторов или обмен данными между БПЛА 10 и пультом управления 17.
Если автоматическая станция содержит два или более количество люков 2 с крышками 3, такая автоматическая станция может принимать и хранить соответствующие количество БПЛА 10 (фиг. 1в).
В зависимости от формы люка 2 ориентация БПЛА 10 при приземлении может отличаться (см. фиг. 1 и фиг. 2а), из-за различных вариантов расположения направляющих 8 на внутренний поверхности 6 крышки 3 люка 2 (см. фиг. 4а и фиг. 4б).
При приземлении БПЛА 10 на внутреннюю поверхность 6 крышки 3 люка 2 с установленными на ней направляющими 8 вариантов исполнений в виде «капли» фиг. 3г, в виде пятиугольника фиг. 3д, в виде ромба (квадрата) фиг. 3е и в виде замкнутого контура, содержащего комбинацию в виде буквы «W», которая задает два внутренних угла 9 и замыкается линией, состоящей из прямого отрезка 21 и дуг 22, опоры 11 оказываются окруженными замкнутыми направляющими 8. Это позволяет удерживать БПЛА на внутренней поверхности 6 крышки 2 при сильном боковом ветре или при приземлении с высокой боковой скоростью и произвести позиционирование БПЛА в процессе закрытия крышки 3 люка 2.
При закрытии крышки 3 люка 2 с вариантом исполнения направляющих 8 в виде буквы «V», вершины 23 внутреннего угла 9 которых выполнена в виде буквы «U» (фиг. 3и), БПЛА 10 скользит по внутренний поверхности 6 крышки 3 люка 2 (линия движения опоры 19 фиг. 3а). Опора 11 упирается в направляющую 8 и скользит по ней до прихода во внутренний угол 9 направляющей 8, вершина 23 которого выполнена в виде буквы «U». Такая форма вершины 23 внутреннего угла 9 повышает угол контакта опоры 11 с вершиной угла 9, и обеспечивает надежную фиксацию БПЛА 10 и точность позиционирования опор 11.
Варианты исполнения автоматической станции, в которых расстояние между направляющими 8 может регулироваться, могут быть настроены на прием БПЛА 10 с различным расстоянием между опор 11. При этом в варианте исполнения фиг. 4в расстояние между направляющими обеспечивается путем монтажа направляющих 8 и закрепления их с помощью винтов по готовым резьбовым отверстиям на крышке, в варианте исполнения фиг 4 г путем перемещения и закрепления на «Т»-образные пазы 25. В случае размещения направляющих 8 на подвижную часть линейных актуаторов 26 (фиг. 4д) возможно оперативное изменение расстояния между направляющими 8 в автоматическом режиме дистанционно и прием БПЛА 10 с различным расстоянием между опор 11 без проведения оператором монтажных или настроечных работ с направляющими 8 до приземления БПЛА 10.
Взлет БПЛА. Исходное состояние - крышка 3 люка 2 автоматической станции закрыта. На внутренней стороне 6 крышки 3 люка 2 на направляющих 8 установлен БПЛА 10, который зацепляется пятками 12 опор 11 за внутренние углы 9 направляющих 8.
По команде на взлет БПЛА 10 автоматическая станция открывает крышку 3 люка 2 для чего выдвигается шток механизма 16 открывания и закрывания, выполненного в виде гидро-, пневмо- или электроцилиндра и который толкает люк и приводит его в горизонтальное положение. БПЛА 10 находится на внутренней поверхности 6 крышки 3 люка 2, пятки 12 опор 11 находятся в зацеплении с внутренними углами 9 направляющими 8. После прихода крышки 3 в горизонтальное положение линейный привод 28 толкателя 13 выдвигает толкающий элемент 27 который выталкивает опоры 11 БПЛА 10 до выхода пяток 12 из под направляющих 8 (положение 11.2 и 12.2 фиг. 3а) и отодвигает их на такое расстояние, чтобы при взлете пятки 12 опор 11 не касались направляющих 8. БПЛА 10 запускает свои моторы и взлетает.
В варианте исполнения толкателя 13 фиг. 6б выталкивание опор 11 БПЛА 10 производится рычагом 31 при вращении ступицы 30 вокруг горизонтальной оси. После выдвижения БПЛА на позицию взлета рычаг 31 должен отойти на исходное положение.
После взлета БПЛА 10 автоматическая станция закрывает крышку 3 люка 2 для чего задвигается шток механизма 16 открывания и закрывания, выполненного в виде гидро-, пневмо- или электроцилиндра и который тянет крышку 3 люка 2 и приводит ее в вертикальное положение.
Если в открытом состоянии люка на его внутреннюю поверхность 6 попали осадки в виде дождя или снега, то при закрытии они начнут скатываться к нижней части 4 крышки 3 и попадут сначала в желоб 14 (фиг. 7), а затем через канал 32 вытекут наружу. В холодное время года или если идут осадки в виде снега, нагреватель 33 должен быть включен для исключения образования льда в желобе 14.
В варианте исполнения автоматической станции фиг. 8 петли 5 расположены ниже нижней кромки 4 крышки 3, что позволяет увеличить посадочную зону и уменьшить воздействие корпуса 1 на БПЛА 10 при взлете и посадке. Механизм открывания и закрывания 16 выполненный в виде привода вращения, открывает и закрывает крышку 3 путем поворота вала.
Вариант исполнения фиг. 9 автоматической станции зарядки и обслуживания беспилотных летательных.
Вариант исполнения автоматической станции зарядки и обслуживания беспилотных летательных аппаратов фиг. 9 позволяет ориентировать крышку 3 люка 2 по отношению к корпусу 1 в зависимости от направления ветра.
Привод вращения 39, установленный над землей на основании 38, поворачивает автоматическую станцию так, чтобы корпус 1 автоматической станции не создавал завихрения воздуха в зоне приземления БПЛА 10. Для этого корпус 1 автоматической станции может быть развернут, например, люком 2 к подветренной стороне, или таким образом что бы ветер дул сбоку корпуса 1.
Таким образом, предложенные технические решения позволяют ускорить процесс позиционирования БПЛА и закрытия люка посадочной платформы путем совмещения этих процессов. Такое решение также упрощает конструкцию автоматической станции за счет того, что процесс позиционирования БПЛА и закрытия люка осуществляется одним приводом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов | 2024 |
|
RU2830732C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| Способ приземления многовинтового БПЛА вертикального взлета и посадки и устройства для его реализации | 2021 |
|
RU2780255C1 |
| Устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем (варианты) | 2022 |
|
RU2788099C1 |
| ПОСАДОЧНАЯ ПЛАТФОРМА ДЛЯ БПЛА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2020 |
|
RU2746538C1 |
| Посадочная платформа для БПЛА вертикального взлета и посадки | 2019 |
|
RU2722249C1 |
| Посадочная площадка для многовинтового БПЛА вертикального взлета и посадки (Варианты) | 2021 |
|
RU2770506C1 |
| Посадочная платформа для беспилотного летательного аппарата | 2019 |
|
RU2710887C1 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
Изобретение относится к конструкции автоматической станции зарядки и обслуживания многовинтовых беспилотных летательных аппаратов (БПЛА) и многовинтового БПЛА, работающего совместно с ней, и может быть использовано для создания сети обслуживания БПЛА, что позволит выполнять различные задачи с использованием БПЛА, дальность полета которых ограничена емкостью аккумулятора. Автоматическая станция зарядки и обслуживания БПЛА содержит корпус, выполненный на боковой стенке корпуса по меньшей мере один люк, крышку люка с установленными в нижней части шарнирными петлями, посадочную площадку и устройство позиционирования БПЛА после приземления. На внутренней стенке крышки люка на опорах установлены по меньшей мере две выполненные из прутка направляющие в виде фигуры незамкнутого или замкнутого контура, содержащего по меньшей мере один внутренний угол. Техническим результатом является ускорение процесса позиционирования БПЛА при посадке и закрытия люка посадочной платформы путем совмещения этих процессов и упрощения конструкции, за счет того, что процесс позиционирования и закрытия люка осуществляется одним приводом. 17 з.п. ф-лы, 30 ил.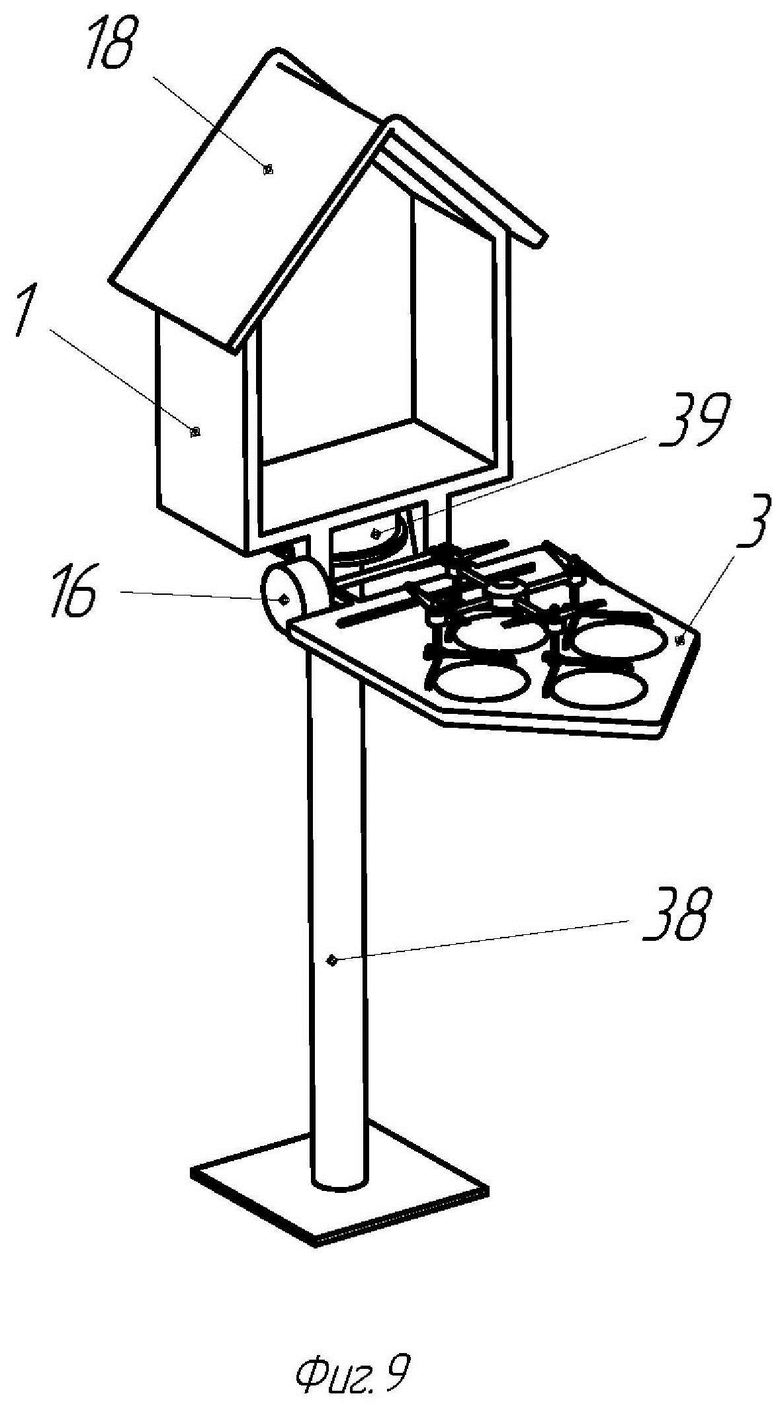
1. Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов, содержащая корпус, выполненный на боковой стенке корпуса по меньшей мере один люк, крышку люка с установленными в нижней части шарнирными петлями, посадочную площадку и устройство позиционирования БПЛА после приземления, отличающаяся тем, что на внутренней стенке крышки люка на опорах установлены по меньшей мере две выполненные из прутка направляющие в виде фигуры незамкнутого или замкнутого контура, содержащего по меньшей мере один внутренний угол.
2. Автоматическая станция по п. 1, отличающаяся тем, что направляющие выполнены в виде буквы V или в форме капли, или ромба, или квадрата.
3. Автоматическая станция по п. 1, отличающаяся тем, что содержит по меньшей мере одну направляющую, выполненную в виде буквы W.
4. Автоматическая станция по любому из пп. 1-3, отличающаяся тем, что вершина внутреннего угла выполнена в виде U-образного заглубления.
5. Автоматическая станция по п. 1, отличающаяся тем, что направляющие установлены таким образом, что вершина внутреннего угла направлена к нижней части крышки люка.
6. Автоматическая станция по п. 1, отличающаяся тем, что содержит две направляющие, которые установлены на одинаковом расстоянии от нижней кромки крышки люка.
7. Автоматическая станция по п. 1, отличающаяся тем, что содержит две направляющие, которые установлены на одной перпендикулярной линии к нижней кромке крышки люка.
8. Автоматическая станция по любому из пп. 1-7, отличающаяся тем, что расстояние между направляющими регулируется.
9. Автоматическая станция по п. 1, отличающаяся тем, что содержит четыре направляющие, которые установлены по углам квадрата с возможностью перемещения по диагонали квадрата.
10. Автоматическая станция по п. 1, отличающаяся тем, что внутренняя стенка крышки люка содержит места крепления направляющих, обеспечивающих крепление направляющих с различным расстоянием между ними.
11. Автоматическая станция по п. 1, отличающаяся тем, что содержит по меньшей мере один толкатель, который толкает по меньшей мере две опоры БПЛА.
12. Автоматическая станция по п. 1, отличающаяся тем, что крышка люка выполнена прямоугольной формы.
13. Автоматическая станция по п. 1, отличающаяся тем, что крышка люка выполнена пятиугольной формы.
14. Автоматическая станция по п. 1, отличающаяся тем, что шарнирные петли расположены ниже нижней кромки крышки люка.
15. Автоматическая станция по п. 1, отличающаяся тем, что содержит по меньшей мере два люка.
16. Автоматическая станция по п. 1, отличающаяся тем, что крышка люка содержит установленный в нижней части желоб, который может быть обогреваемым.
17. Автоматическая станция по п. 1, отличающаяся тем, что направляющие выполнены из электропроводного материала и изолированы друг от друга.
18. Автоматическая станция по любому из пп. 1-17, отличающаяся тем, что установлена на основании с возможностью вращения вокруг вертикальной оси.
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |
| Автономная зарядная станция для беспилотных летательных аппаратов | 2021 |
|
RU2775272C1 |
| УСТРОЙСТВО ПАРКОВКИ И ЗАРЯДКИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (БПЛА) | 2019 |
|
RU2723197C1 |
| US 20140124621 А1, 08.05.2014 | |||
| US 9139310 В1, 22.09.2015 | |||
| US 20160001883 A1, 07.01.2016 | |||
| US 20160144982 A1, 26.05.2016. | |||

