Изобретение относится к области радиотехники и может быть использовано для определения местоположения объектов, таких как беспилотные летательные аппараты и другие робототехнические комплексы.
Наиболее близким по технической сущности к заявленному способу (прототипом) является способ радиотехнической навигации объектов с помощью маячных разностно-дальномерных радионавигационных систем, описанный в справочнике: «Радиоэлектронные системы: Основы построения и теория.» Справочник. Изд. 2-е, перераб. И доп./ Под ред. Я.Д. Ширмана. -М.: Радиотехника, 2007. - 512 с.: стр. 46-47, основанный на синхронном излучении наземной группой маяков сигналов, приеме сигналов объектом навигации, и использовании в качестве навигационного параметра разности времен распространения радиоволн, пропорционально соответствующих разности расстояний от маяков до объекта навигации, построении линий положения объекта на плоскости в виде гипербол и поверхностей положения в пространстве в виде гиперболоидов вращения, и нахождении позиции объекта навигации в точке пересечения двух гипербол на плоскости или трех гиперболоидов вращения в пространстве.
Основным недостатком прототипа является необходимость обеспечения большой импульсной мощности излучаемых сигналов при большой дальности навигации, что обуславливает низкую скрытность навигационных сигналов для средств радиотехнической разведки противника.
Техническим результатом предлагаемого изобретения является повышение радиотехнической скрытности работы системы, за счет использования широкополосных линейно-частотно-модулированных (ЛЧМ) сигналов и их обработки автокорреляционным приемником.
Указанный технический результат достигается тем, что в известном способе радиотехнической навигации объектов, заключающемся в синхронном излучении наземной группой радиомаяков сигналов, приеме сигналов объектом навигации, и использовании в качестве навигационного параметра разности времен распространения радиоволн, пропорциональных соответствующим разностям расстояний от радиомаяков до объекта навигации, построении линий положения объекта на плоскости в виде гипербол и поверхностей положения в пространстве в виде гиперболоидов вращения, и нахождении позиции объекта навигации в точке пересечения двух гипербол на плоскости или трех гиперболоидов вращения в пространстве, отличающийся тем, что радиомаяки излучают линейно-частотно-модулированные сигналы с одинаковой скоростью изменения внутриимпульсной частоты, начальные частоты которых индивидуальны для каждого радиомаяка и отличаются на заданные величины, сумму сигналов принимают автокорреляционным приемником объекта навигации, фильтруют, задерживают на заданное время, перемножают на собственные задержанные копии, выделяют разностную составляющую частоты суммы сигналов и по максимальному значению ее амплитудно-частотного спектра (АЧС) определяют наличие навигационных сигналов, выделяют составляющие суммы сигналов на взаимноразностных частотах, по значениям разности составляющих АЧС на взаимноразностных частотах при текущем приеме и рассчитанных при их одновременном приеме определяют разности времен распространения сигналов радиомаяков до объекта навигации, которые пропорциональны соответствующим разностям расстояний.
Сущность изобретения заключается в том, что дополнительно радиомаяками синхронно излучаются широкополосные ЛЧМ импульсы с шириной спектра Δƒс, длительностью τи и скоростью изменения внутриимпульсной частоты  имеющие индивидуальные для каждого радиомаяка начальные частоты ƒ0, отличающиеся на заданные величины частот подстановки ƒпi, где
имеющие индивидуальные для каждого радиомаяка начальные частоты ƒ0, отличающиеся на заданные величины частот подстановки ƒпi, где  N - количество одновременно работающих радиомаяков.
N - количество одновременно работающих радиомаяков.
Сигналы радиомаяков:

где Ai - амплитуда сигнала i-го радиомаяка, 0<t<τи.
Сумму N сигналов (1) принимают, фильтруют, задерживают на время τз>1/Δƒвч, где Δƒвч - полоса пропускания фильтра высоких частот автокорреляционного приемника, согласованная с шириной спектра ЛЧМ сигнала Δƒс и перемножают на собственную задержанную копию. Сигнал на выходе смесителя будет иметь вид:

Далее выделяют разностную составляющую частоты суммы сигналов ƒp, и по факту превышения ее максимальным значением порога A0 принимают решение о наличии навигационных сигналов.
Одновременный приход сигналов на приемник объекта навигации возможен лишь в частном случае, когда объект равноудален от всех N радиомаяков. Для данного частного случая рассчитываются значения взаимноразностных частот i-го и j-го ( j≠i) радиомаяков
j≠i) радиомаяков

где ϕij - начальные фазы взаимноразностных сигналов, ƒдi и ƒдj - сдвиги частот навигационных сигналов по Доплеру, ƒp=μτз - разностная частота.
При малых радиальных скоростях передвижения объекта относительно радиомаяков и высокой скорости изменения внутриимпульсной частоты μ, значения ƒдi<<ƒпi и ƒдj<<ƒпj, т.е. в таком случае эффектом Доплера можно пренебречь, тогда:

где ƒопij=iƒр+ƒпi-ƒпj) - частота взаимноразностной составляющей АЧС разностного сигнала i-го и j-го радиомаяков, рассчитанная при одновременном приеме.
В случае, если расстояния от N радиомаяков до объекта навигации R1,…,RN не равны друг другу, сигналы будут поступать на вход приемника с временными задержками τi=Ri/c, где Ri - расстояние от i-го радиомаяка до объекта навигации, с - скорость света.
Выделяют составляющие суммы сигналов на взаимноразностных частотах, значения которых:

где ƒтпij - частота взаимноразностной составляющей АЧС разностного сигнала, полученного на текущем интервале приема, nш - внутренний шум приемника.
Далее определяют разность значений взаимноразностных составляющих АЧС навигационных сигналов i-го и j-го радиомаяков при текущем приеме и рассчитанных при их одновременном приеме:

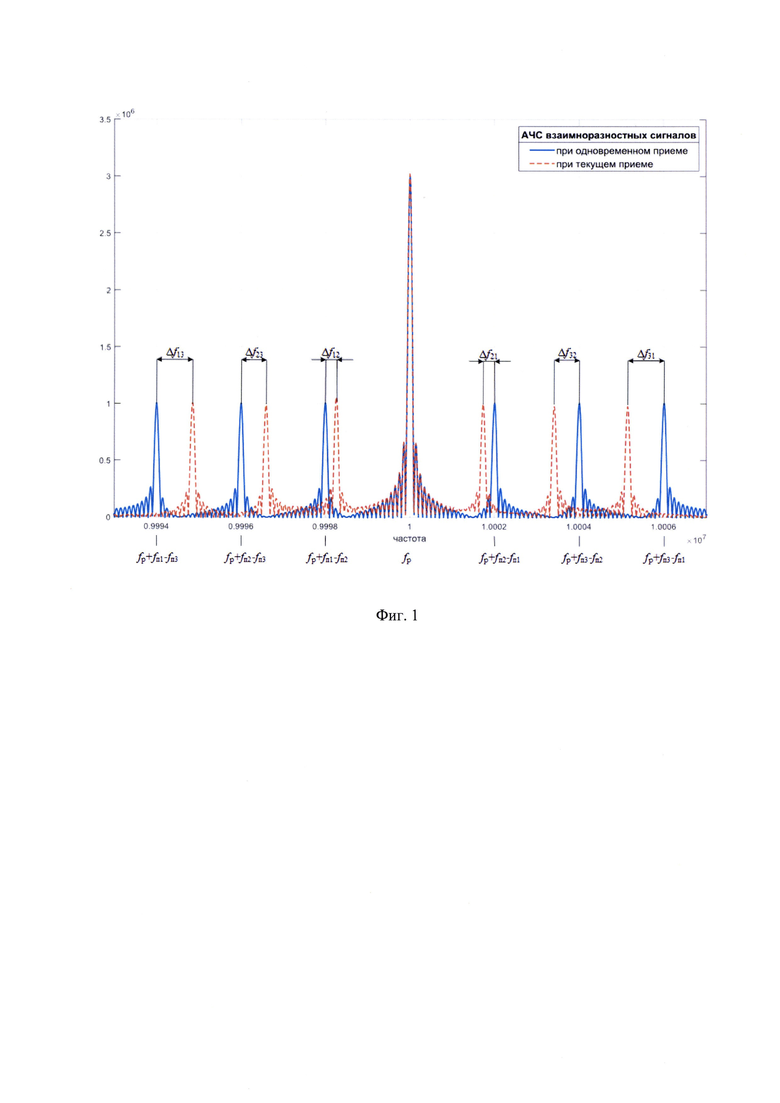
На фигуре 1 приведен пример АЧС взаиморазностных сигналов для трех радиомаяков, при ƒр=10 МГц, ƒп1=Δƒп1, ƒn2=ƒnX+Δƒn2, ƒп3=ƒп1+Δƒп3, Δƒп1=0, Δƒп2=2 кГц, Δƒп3=6 кГц.
По значению разности Δƒij определяют разности времен распространения сигналов радиомаяков до объекта навигации

которые пропорциональны соответствующим разностям расстояний:

При поступлении на вход автокорреляционного приемника ЛЧМ сигналов с шириной спектра Δƒc=Δƒвч отношение сигнал/шум на его выходе [Likhachev V.P., Podstrigaev A.S., Nguyen Trong Nhan, Davydov V.V., Myazin N.S. Study of the Accuracy of Determining the Location of Radio Emission Sources with Complex Signals when Using Autocorrelation and Matrix Receivers in Broadband Tools for Analyzing the Electronic Environment // Lecture Notes in Computer Science. 2020. Vol. 12525. Pp. 326-333. DOI: 10.1007/978-3-030-65726-0_29]:

где qвх - отношение сигнал/шум на входе автокорреляционного приемника,  - ширина полосы пропускания фильтров нижних частот на выходе автокорреляционного приемника.
- ширина полосы пропускания фильтров нижних частот на выходе автокорреляционного приемника.
При qвх>4 соотношение qвых (9) увеличивается по сравнению с qвх в  . Таким образом, использование навигационных ЛЧМ сигналов, например, с длительностью τи=100 мкс и с шириной спектра Δƒс=50 МГц, и их автокорреляционный прием позволяют снизить требуемую импульсную мощность сигналов радиомаяков
. Таким образом, использование навигационных ЛЧМ сигналов, например, с длительностью τи=100 мкс и с шириной спектра Δƒс=50 МГц, и их автокорреляционный прием позволяют снизить требуемую импульсную мощность сигналов радиомаяков  в 2500 раз при сохранении значения отношения сигнал/шум qвых обеспечивающего заданную вероятность правильного обнаружения навигационных сигналов каждого радиомаяка при фиксированном уроне вероятности ложной тревоги. За счет этого при фиксированной требуемой дальности радионавигации происходит снижение радиотехнической заметности радиомаяков (снижение вероятности правильного обнаружения сигналов радиомаяков средствами радиотехнической разведки) и повышение скрытности навигационной системы в целом.
в 2500 раз при сохранении значения отношения сигнал/шум qвых обеспечивающего заданную вероятность правильного обнаружения навигационных сигналов каждого радиомаяка при фиксированном уроне вероятности ложной тревоги. За счет этого при фиксированной требуемой дальности радионавигации происходит снижение радиотехнической заметности радиомаяков (снижение вероятности правильного обнаружения сигналов радиомаяков средствами радиотехнической разведки) и повышение скрытности навигационной системы в целом.
Этим достигается указанный в изобретении результат.
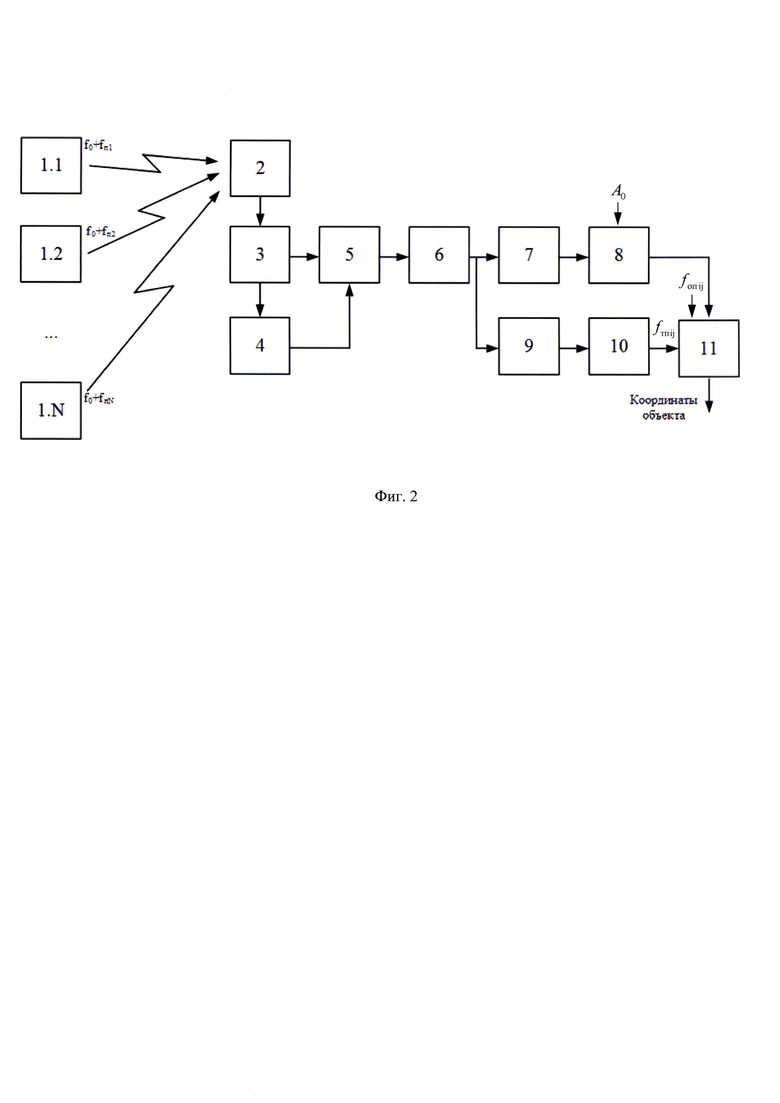
Способ скрытной радиотехнической навигации может быть реализован, например, с помощью устройства, схема которого приведена на фиг. 2, где обозначено: 1.1-1.N - радиомаяки; 2 - антенна объекта навигации; 3 -полосовой фильтр высоких частот; 4 - линия задержки; 5 - смеситель; 6 - полосовой фильтр низких частот; 7 - полосовой фильтр разностной частоты; 8 - блок обнаружения навигационных сигналов; 9 - устройство получения АЧС; 10 - блок определения взаиморазностных частот; 11 - вычислительный блок.
Блоки 2-6 образуют автокорреляционных приемник, блок 8 предназначен для обнаружения навигационных сигналов, блок определения взаимноразностных частот 10 предназначен для определения значений взаимноразностных частот по АЧС, полученным при текущем интервале приема, вычислительный блок 11 определяет разницы значений взаимноразностных частот Δƒij при одновременном и текущем приеме навигационных сигналов, вычисляет соответствующие разницы времен распространения сигналов Δƒij и определяет соответствующие полученным значениям координаты.
Предлагаемый способ практически применим, так как для его реализации могут быть использованы типовые элементы, широко распространенные в области электроники и электротехники. Например, полосовые фильтры 6-7 могут быть реализованы как волновые аналоговые фильтры; полосовой фильтр 3 может быть реализованы как фильтр на поверхностных акустических волнах или фильтры на резонаторах [Улахович Д.А. Основы теории линейных электрических цепей: Учеб. пособие. - СПб.: БХВ-Петербург, 2009. - с. 586-603, 746-780], устройство получения спектра 9 можно реализовать на основе аналого-цифрового преобразователя (АЦП) и программируемой логической интегральной схемы (ПЛИС).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ВИДОВ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ В АВТОКОРРЕЛЯЦИОННОМ ПРИЕМНИКЕ | 2018 |
|
RU2683791C1 |
| СПОСОБ АНАЛИЗА СЛОЖНЫХ СИГНАЛОВ В АВТОКОРРЕЛЯЦИОННОМ ПРИЕМНИКЕ | 2018 |
|
RU2726937C2 |
| Способ определения видов радиолокационных сигналов в автокорреляционном приемнике | 2019 |
|
RU2716017C1 |
| СПОСОБ ОБРАБОТКИ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ МНОГОКАНАЛЬНЫМ АВТОКОРРЕЛЯЦИОННЫМ ПРИЕМНИКОМ | 2018 |
|
RU2698579C1 |
| Способ определения параметров частотно-кодированных сигналов в автокорреляционном приемнике | 2019 |
|
RU2726188C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОЗДУШНОГО ОБЪЕКТА ДИНАМИЧЕСКОЙ СИСТЕМОЙ РАДИОТЕХНИЧЕСКОГО КОНТРОЛЯ | 2017 |
|
RU2660160C1 |
| Способ определения параметров частотно-кодированных сигналов в автокорреляционном приемнике | 2019 |
|
RU2726221C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЛЧМ СИГНАЛОВ | 2014 |
|
RU2578041C1 |
| ОДНОПОЗИЦИОННЫЙ РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 2022 |
|
RU2801362C1 |
| СПОСОБ РАДИОЛОКАЦИИ | 2023 |
|
RU2804395C1 |
Изобретение относится к области радиотехники и может быть использовано для определения местоположения объектов, таких как беспилотные летательные аппараты и другие робототехнические комплексы. Техническим результатом предлагаемого изобретения является повышение радиотехнической скрытности работы системы. В заявленном способе радиотехнической навигации объектов осуществляют синхронное излучение наземной группой радиомаяков сигналов, прием сигналов объектом навигации и использование в качестве навигационного параметра разности времен распространения радиоволн, пропорциональных соответствующим разностям расстояний от радиомаяков до объекта навигации. Проводят построение линий положения объекта на плоскости в виде гипербол и поверхностей положения в пространстве в виде гиперболоидов вращения и нахождение позиции объекта навигации в точке пересечения двух гипербол на плоскости или трех гиперболоидов вращения в пространстве. Радиомаяки излучают линейно-частотно-модулированные сигналы с одинаковой скоростью изменения внутриимпульсной частоты, начальные частоты которых индивидуальны для каждого радиомаяка и отличаются на заданные величины. Сумму сигналов принимают автокорреляционным приемником объекта навигации, фильтруют, задерживают на заданное время, перемножают на собственные задержанные копии, выделяют разностную составляющую частоты суммы сигналов. По максимальному значению ее амплитудно-частотного спектра (АЧС) определяют наличие навигационных сигналов, выделяют составляющие суммы сигналов на взаимноразностных частотах, по значениям разности составляющих АЧС на взаимноразностных частотах при текущем приеме и рассчитанных при их одновременном приеме определяют разности времен распространения сигналов радиомаяков до объекта навигации, которые пропорциональны соответствующим разностям расстояний. 2 ил.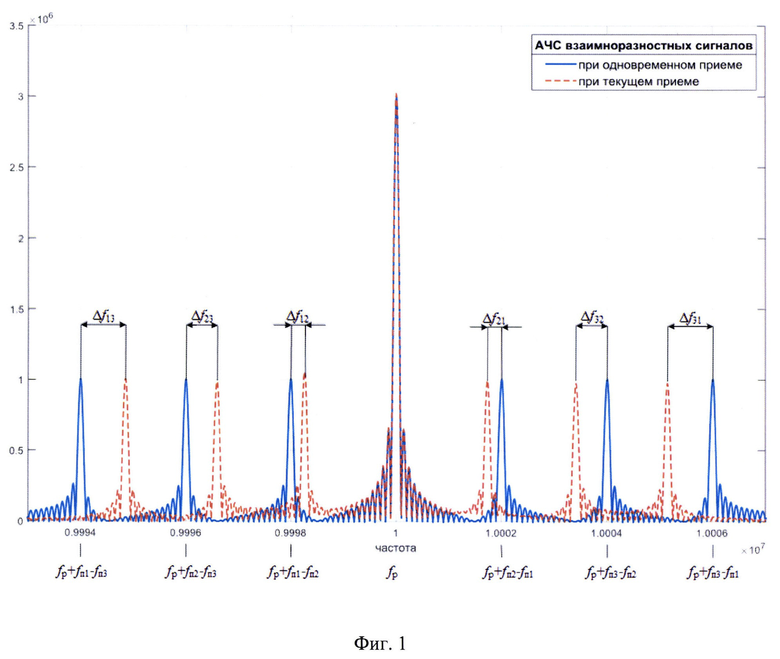
Способ радиотехнической навигации, заключающийся в синхронном излучении наземной группой радиомаяков сигналов, приеме сигналов объектом навигации и использовании в качестве навигационного параметра разности времен распространения радиоволн, пропорциональных соответствующим разностям расстояний от радиомаяков до объекта навигации, построении линий положения объекта на плоскости в виде гипербол и поверхностей положения в пространстве в виде гиперболоидов вращения и нахождении позиции объекта навигации в точке пересечения двух гипербол на плоскости или трех гиперболоидов вращения в пространстве, отличающийся тем, что радиомаяки излучают линейно-частотно-модулированные сигналы с одинаковой скоростью изменения внутриимпульсной частоты, начальные частоты которых индивидуальны для каждого радиомаяка и отличаются на заданные величины, сумму сигналов принимают автокорреляционным приемником объекта навигации, фильтруют, задерживают на заданное время, перемножают на собственные задержанные копии, выделяют разностную составляющую частоты суммы сигналов и по максимальному значению ее амплитудно-частотного спектра определяют наличие навигационных сигналов, выделяют составляющие суммы сигналов на взаимноразностных частотах, по значениям разности составляющих амплитудно-частотного спектра на взаимноразностных частотах при текущем приеме и рассчитанных при их одновременном приеме определяют разности времен распространения сигналов радиомаяков до объекта навигации, которые пропорциональны соответствующим разностям расстояний.
| Способ определения местоположения объекта навигации | 2018 |
|
RU2676862C1 |
| Способ определения положения летательного аппарата относительно взлётно-посадочной полосы при посадке и система для его осуществления | 2016 |
|
RU2620359C9 |
| СПОСОБ ПРИВОДА СРЕДСТВ ПЕРЕДВИЖЕНИЯ К РАДИОМАЯКУ, УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ И ДВУХЧАСТОТНЫЙ ЧАСТОТНЫЙ ДАЛЬНОМЕР | 2013 |
|
RU2554051C1 |
| СПОСОБ ОБРАБОТКИ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ МНОГОКАНАЛЬНЫМ АВТОКОРРЕЛЯЦИОННЫМ ПРИЕМНИКОМ | 2018 |
|
RU2698579C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ НАЗЕМНЫХ РАДИОМАЯКОВ | 2010 |
|
RU2432677C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1991 |
|
RU2018858C1 |
| GB 1382150 A, 29.01.1975 | |||
| WO 2015112038 A1, 30.07.2015. | |||

