ОБЛАСТЬ ТЕХНИКИ
Раскрытые здесь способ и устройство относятся к области электрических сетей и, более конкретно, но не исключительно, к электрическим сетям передачи и распределения и, более конкретно, но не исключительно, к обнаружению неисправностей в электрической сети с помощью датчика, монтированного на электрическом кабеле, и, в частности, но не исключительно, к использованию беспилотного летательного аппарата для монтирования датчика или любого другого устройства на электрический кабель или демонтирования с него.
УРОВЕНЬ ТЕХНИКИ
В электросети может быть много неисправностей. Различные компоненты сети могут выйти из строя, и отказ может быть мгновенным, постепенным или периодическим. Некоторые неисправности могут быть вызваны окружающей средой, например влажностью, дымом, пылью, ветром, деревьями и т.д. Различные сбои и отказы могут иметь разные характеристики и по-разному влиять на сеть. Определение характеристик, обнаружение, идентификация и локализация сбоев в электрической сети - это известная проблема в различных решениях, включая различные типы датчиков, монтированных на кабеле электрической сети. Известны и другие устройства, монтируемые на электрическом кабеле, например, устройства для оповещения о самолетах. Монтаж и демонтаж таких устройств на кабелях, в частности, без нарушения энергоснабжения, сложен, опасен, трудоемок и дорог. Следовательно, было бы крайне предпочтительно избавиться от вышеуказанных ограничений.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Согласно одному примерному варианту осуществления изобретения заявлена система, способ и/или компьютерная программа для монтирования кабельного устройства на электрическом кабеле электрической сети и/или монтирования кабельного устройства с электрического кабеля, причем монтажное устройство включает в себя первую соединительную часть, выполненную с возможностью крепления монтажного устройства к летательному аппарату, вторую соединительную часть, выполненную с возможностью крепления кабельного устройства к монтажному устройству, и часть навигации, приспособленную для предоставления пользователю возможности управлять летательным аппаратом, чтобы направить прорезь кабельного устройства к электрическому кабелю и/или для автоматической навигации летательного аппарата, чтобы направить прорезь кабельного устройства к электрическому кабелю, и/или предоставления пользователю возможности осуществлять навигацию летательного аппарата к кабельному устройству, и/или автоматической навигации летательного аппарата к кабельному устройству.
Согласно другому примерному варианту осуществления изобретения часть навигации может быть приспособлена для того, чтобы предоставить пользователю возможность управлять летательным аппаратом, чтобы выровнять прорезь кабельного устройства с электрическим кабелем, и/или автоматически управлять летательным аппаратом, чтобы выровнять прорезь кабельного устройства с электрическим кабелем, и/или предоставить пользователю возможность управлять летательным аппаратом, чтобы монтировать кабельное устройство на электрический кабель, и/или автоматически управлять летательным аппаратом, чтобы установить кабельное устройство на электрическом кабеле и/или предоставить пользователю возможность управлять летательным аппаратом, чтобы выровнять монтажное устройство с кабельным устройством, монтированным на электрическом кабеле, и/или автоматически управлять летательным аппаратом, чтобы выровнять монтажное устройство с кабельным устройство, монтированным на электрическом кабеле.
Согласно еще одному примерному варианту осуществления изобретения часть навигации приспособлена выполнять навигацию с использованием оптических изображений одного или более из электрического кабеля и кабельного устройства и/или навигацию в соответствии с одним или более из электрического поля и магнитного поля, излучаемых одним или более из электрического кабеля и кабельного устройства.
Согласно еще одному примерному варианту осуществления изобретения монтажное устройство может дополнительно включать в себя устройство локальной связи, приспособленное коммуникативно соединяться с системой локального управления летательным аппаратом, чтобы выполнять автоматическое управление летательным аппаратом.
Тем не менее, согласно другому примерному варианту осуществления изобретения монтажное устройство может дополнительно включать в себя устройство удаленной связи, коммуникативно соединенное с устройством удаленного управления, причем устройство удаленной связи выполнено с возможностью коммуникации с устройством удаленного управления для передачи навигационных данных от монтажного устройства к устройству удаленного управления и/или данных управления навигацией от устройства удаленного управления к монтажному устройству.
Кроме того, согласно другому примерному варианту осуществления изобретения монтажное устройство может дополнительно включать в себя устройство удаленного управления, позволяющее пользователю управлять летательным аппаратом так, чтобы выровнять прорезь кабельного устройства с электрическим кабелем и/или управлять летательным аппаратом, чтобы выровнять монтажное устройство с кабельным устройством, монтированным на электрическом кабеле, и/или управлять летательным аппаратом, чтобы монтировать кабельное устройство на электрическом кабеле, и/или управлять летательным аппаратом, чтобы демонтировать кабельное устройство от электрического кабеля и/или переключить монтажное устройство в автоматический режим с использованием устройства связи, коммуникативно соединенного с системой локального управления летательным аппаратом, для выполнения автоматического управления летательным аппаратом.
Кроме того, согласно другому примерному варианту осуществления изобретения вторая соединительная часть, выполненная с возможностью крепления кабельного устройства к монтажному устройству, включает в себя механическое соединение и/или электромеханическое соединение.
Согласно еще одному другому примерному варианту осуществления настоящего изобретения монтажное устройство может дополнительно включать в себя часть активации блокировки, приспособленную для присоединения к блокировочной части кабельного устройства и активировать блокировочную часть, чтобы заблокировать кабельное устройство на электрическому кабеле, и/или активировать деблокировку кабельного устройства от электрического кабеля и/или идентификации индикации блокировки кабельного устройства на электрическом кабеле, и/или идентификации индикации деблокировки кабельного устройства от электрического кабеля.
Кроме того, согласно еще одному примерному варианту осуществления изобретения монтажное устройство может дополнительно включать в себя манипулирующее устройство для маневрирования монтажной частью относительно летательного аппарата по меньшей мере в одном из углов рыскания, тангажа и крена и/или маневрирования кабельным устройством относительно монтажной части по меньшей мере в одном из углов рыскания, тангажа и крена, и/или маневрирования кабельным устройством относительно электрического кабеля по меньшей мере в одном из углов рыскания, тангажа и крена, и/или маневрирования монтажной частью относительно кабельного устройства, монтированного на электрическом кабеле, по меньшей мере в одном из углов рыскания, тангажа и крена, и/или маневрирования монтажной частью без влияния по меньшей мере на один из углов рыскания, тангажа и крена летательного аппарата и/или маневрирования кабельным устройством без влияния по крайней мере на один из углов рыскания, тангажа и крена летательного аппарата.
Согласно еще одному примерному варианту осуществления изобретения монтажное устройство приспособлено маневрировать одним или более из углов рыскания, тангажа и крена в соответствии с данными, полученными от части навигации.
Кроме того, согласно другому примерному варианту осуществления изобретения, предусмотрен летательный аппарат для монтирования кабельного устройства на электрическом кабеле электрической сети, при этом летательный аппарат включает в себя монтажную часть, часть присоединения датчика, выполненную с возможностью прикрепления кабельного устройства к монтажной части, часть навигации прорези, приспособленную для предоставления пользователю возможности осуществлять навигацию летательного аппарата, чтобы направлять прорезь кабельного устройства к электрическому кабелю, и/или автоматической навигации летательного аппарата, чтобы направить прорезь кабельного устройства к электрическому кабелю, и/или предоставления пользователю возможности осуществлять навигацию летательного аппарата к кабельному устройству, и/или автоматической навигации летательного аппарата к кабельному устройству.
Кроме того, согласно другому примерному варианту осуществления изобретения летательный аппарат может дополнительно содержать часть присоединения коптера, выполненную с возможностью крепления летательного аппарата к монтажной части, причем часть присоединения коптера приспособлена к маневрированию монтажным устройством относительно летательного аппарата по меньшей мере в одном из углов рысканья, тангажа и крена в соответствии с данными, полученными от части навигации прорези.
Кроме того, согласно другому примерному варианту осуществления изобретения, летательный аппарат может дополнительно включать в себя часть навигации дальнего действия, позволяющую пользователю осуществлять навигацию летательного аппарата, чтобы направлять часть навигации прорези к электрическому кабелю и/или приспособленную для автоматической навигации летательного аппарата, чтобы направить часть навигации прорези к электрическому кабелю.
Кроме того, согласно другому примерному варианту осуществления изобретения заявлен способ монтирования кабельного устройства на электрическом кабеле электрической сети, который может включать в себя крепление кабельного устройства к монтажному устройству, прикрепленному к летательному аппарату, пилотирование летательного аппарата, с использованием части навигации дальнего действия, к электрическому кабелю, направление части навигации ближнего действия к электрическому кабелю, пилотирование летательного аппарата, с использованием части навигации ближнего действия, к электрическому кабелю, выравнивание прорези кабельного устройства с электрическим кабелем и монтирование кабельного устройства на электрическом кабеле, причем электрический кабель вставляют в прорезь кабельного устройства.
Кроме того, согласно еще одному примерному варианту осуществления изобретения заявлен способ демонтирования кабельного устройства с электрического кабеля электрической сети, который может включать в себя пилотирование летательного аппарата с использованием части навигации дальнего действия к электрическому кабелю, идентификацию кабельного устройства, монтированного на электрическом кабеле, направление части навигации ближнего действия к кабельному устройству, пилотирование летательного аппарата с использованием части навигации ближнего действия к электрическому кабелю, выравнивание монтажной части летательного аппарата с кабельным устройством, деблокировку кабельного устройства от электрического кабеля и демонтирование кабельного устройства с электрического кабеля.
Если не указано иное, все используемые здесь технические и научные термины имеют значения, которые обычно понимаются специалистом в данной области техники. Материалы, способы и примеры, раскрытые здесь, являются лишь иллюстративными и не предназначены для ограничения объема правовой охраны настоящего изобретения. За исключением случаев, когда это необходимо или присуще самим процессам, никакой конкретный порядок этапов или шагов способов и процессов, описанных здесь, включая чертежи, не предполагается или не подразумевается. Во многих случаях порядок этапов процесса может изменяться без изменения задачи или результата описанных способов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В настоящем документе исключительно в качестве примера описаны некоторые варианты осуществления изобретения, данные со ссылкой на прилагаемые чертежи. Следует подчеркнуть, что на каждом конкретном чертеже детали, показанные в качестве примера и иллюстрации различных вариантов осуществления изобретения, представлены только для того, чтобы предоставить только то, что считается наиболее важным, полезным и понятным для описания принципов и концептуальных аспектов осуществления изобретения. В этом отношении структурные детали вариантов осуществления изобретения не показаны более подробно, чем это необходимо для понимания основных принципов изобретения, из описания вместе с чертежами для специалистов в данной области техники будет понятно, как некоторые формы и конструкции могут быть осуществлены на практике.
На чертежах:
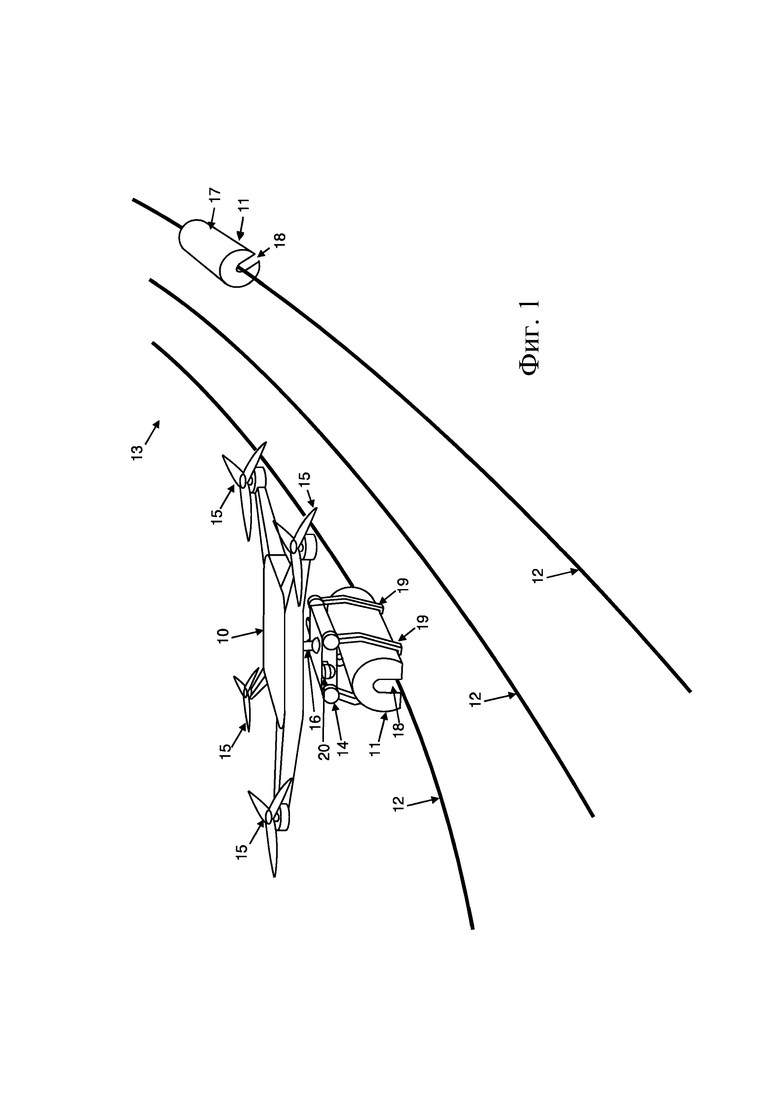
фиг. 1 - упрощенный вид летательного аппарата, включающего монтажную часть, устанавливающую кабельное устройство на электрический кабель электрической сети;
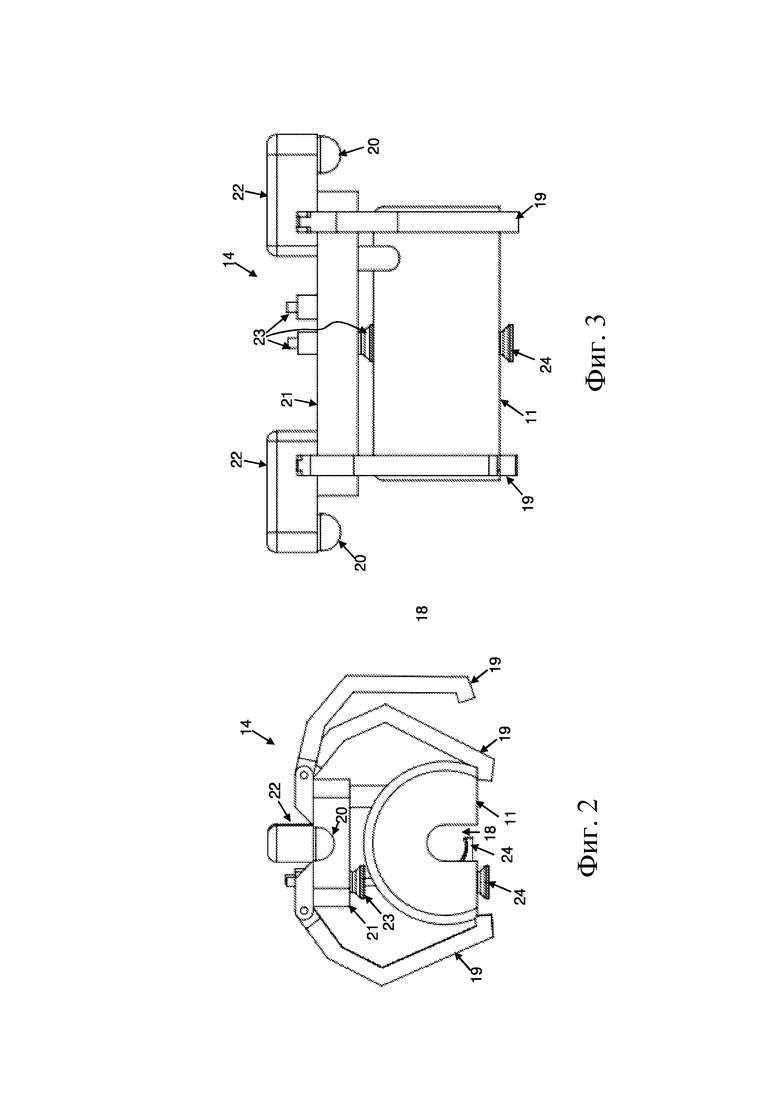
фиг. 2 - упрощенный вид спереди монтажной части;
фиг. 3 - упрощенный вид сбоку монтажной части;
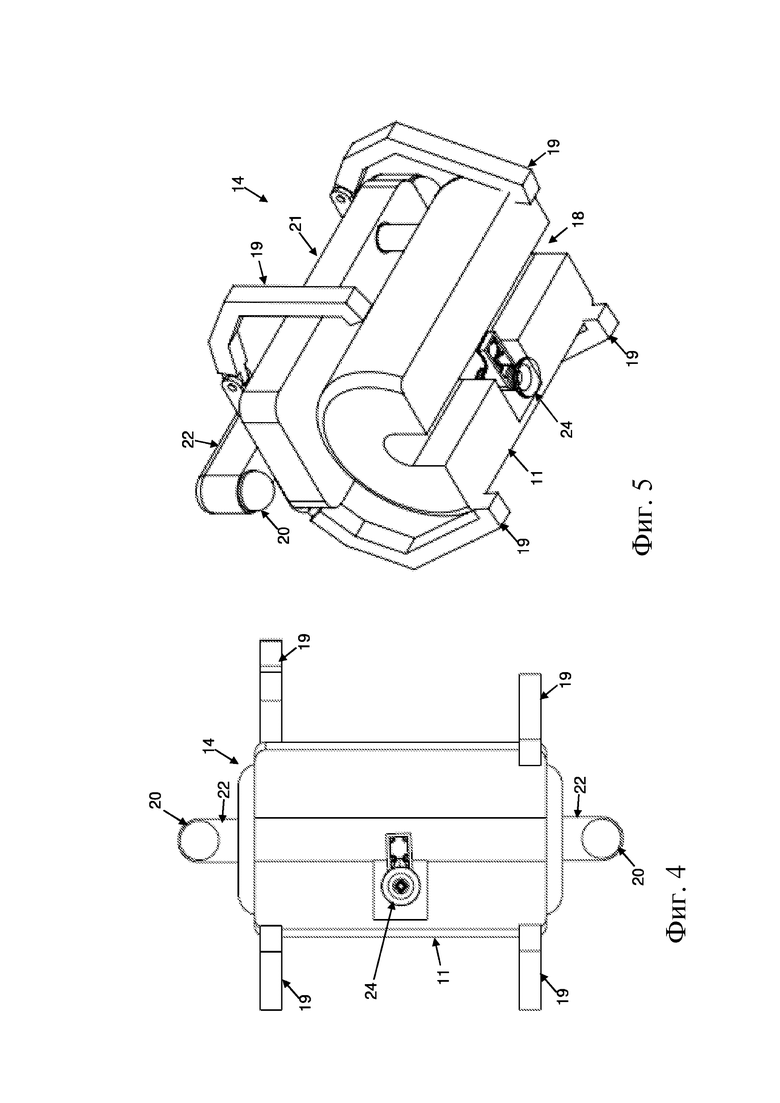
фиг. 4 - упрощенный вид снизу монтажной части;
фиг. 5 - упрощенный вид в аксонометрии монтажной части;
фиг. 6 - упрощенный вид вычислительного устройства 1, обычно включенного в корпус монтажной части;
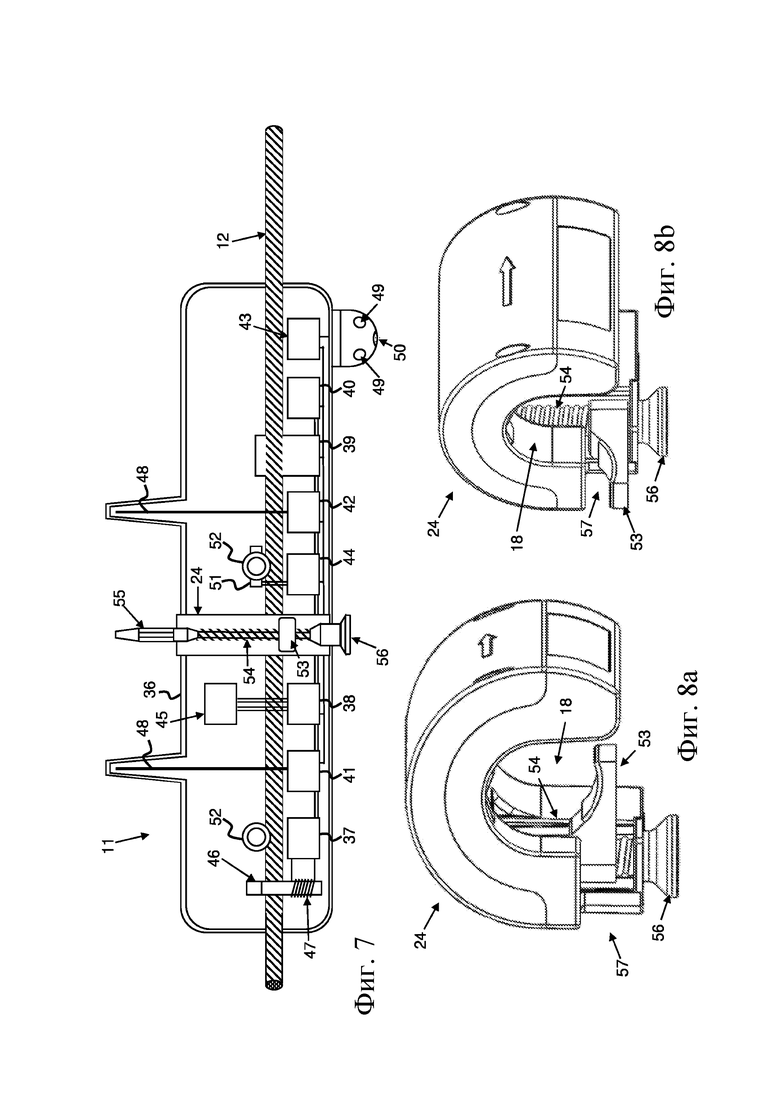
фиг. 7 - упрощенный вид в разрезе кабельного устройства, монтированного на электрическом кабеле;
фиг. 8А - упрощенный вид части зажима кабеля кабельного устройства в открытом положении;
фиг. 8В - упрощенный вид части зажима кабеля кабельного устройства в закрытом положении;
фиг. 9А - упрощенный вид спереди летательного аппарата и встроенной монтажной части, несущей кабельное устройство под летательным аппаратом;
фиг. 9В - упрощенный вид сбоку системы с фиг.9А;
фиг. 10 - упрощенный вид спереди летательного аппарата и встроенной монтажной части, несущей кабельное устройство над летательным аппаратом;
фиг. 11 - упрощенный вид спереди летательного аппарата и встроенной монтажной части, несущей кабельное устройство над летательным аппаратом с одним или более (вторым) устройством навигации вблизи, направленным внутрь (вниз);
фиг. 12 - упрощенный вид сбоку летательного аппарата и встроенной монтажной части, несущей кабельное устройство с устройством навигации дальнего действия, устройством навигации ближнего действия и устройством точного маневрирования;
фиг. 13 - упрощенный вид сбоку летательного аппарата и съемной монтажной части, оснащенной устройством навигации дальнего действия, устройством навигации ближнего действия и устройством точного маневрирования; и
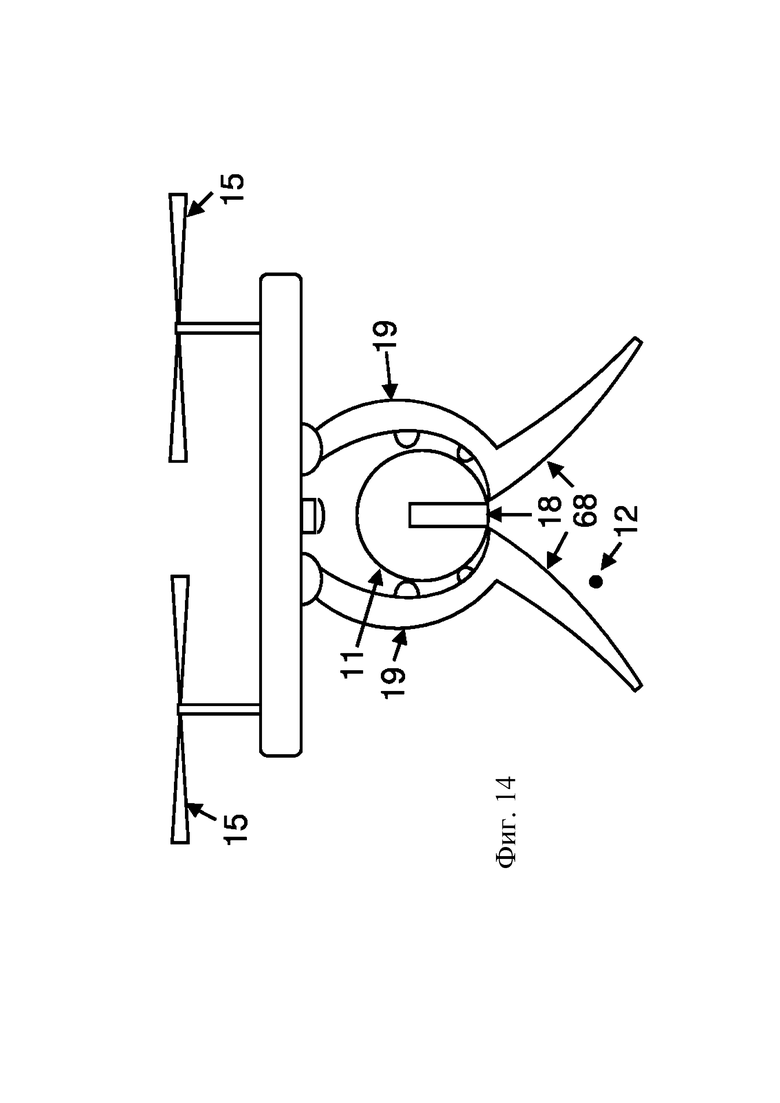
фиг. 14 - упрощенный вид спереди летательного аппарата с монтажной частью с воронкой для направления прорези кабельного устройства к кабелю или наоборот.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Изобретение в его вариантах осуществления позволяет создать способ и систему для монтирования устройства на электрический кабель с использованием беспилотного летательного аппарата и/или демонтирования устройства с электрического кабеля с использованием беспилотного летательного аппарата. Устройство может быть датчиком, предупреждающим знаком, узлом связи и т.д. Беспилотный летательный аппарат может быть дроном, коптером, квадрокоптером и/или любым другим летательным аппаратом. Летательный аппарат может быть дистанционно управляемым или автономным.
Принципы и работа системы и способа использования летательного аппарата для монтирования устройства на электрический кабель или демонтирования с него согласно нескольким примерным вариантам осуществления изобретения будут более понятны после изучения чертежей и сопровождающего их описания.
Прежде чем подробно объяснять по меньшей мере один вариант осуществления изобретения, следует понимать, что варианты осуществления изобретения не ограничиваются в своем применении деталями конструкции и расположением компонентов, изложенными в нижеследующем описании или проиллюстрированными на чертежах. На практике могут быть реализованы другие варианты осуществления изобретения, или они могут быть реализованы различными способами. Кроме того, следует понимать, что формулировки и терминология в настоящем документе использованы для описания и не должны рассматриваться как ограничивающие.
В данном документе элемент чертежа, который не описан в рамках чертежа и помечен номером позиции, которая был описан на предыдущем чертеже, имеет то же применение и описание, что и на предыдущих чертежах. Точно так же элемент, который обозначен в тексте номером позиции, который не появляется на чертеже, описанном текстом, имеет то же использование и описание, что и на предыдущих чертежах, где он был описан.
Чертежи в данном документе могут быть не в масштабе. На разных чертежах могут использоваться разные масштабы, и даже в пределах одного чертежа могут использоваться разные масштабы, например разные масштабы для разных видов одного и того же объекта или разные масштабы для двух смежных объектов.
Целью вариантов осуществления изобретения является использование летательного аппарата для установки или монтирования любого устройства, в частности измерительного устройства или датчика, на электрическом кабеле. Измерительное устройство может измерять различные электрические параметры во множестве мест в электрической сети и определять, путем сравнения множества измерений, наличие сбоев, тип или характеристики сбоя и его местоположение. Другой целью вариантов осуществления изобретения является использование летательного аппарата для снятия или демонтирования любого устройства, в частности измерительного устройства или датчика, с электрического кабеля.
Термин «сеть» или «электрическая сеть» может относиться к сети электропередачи и/или электрической распределительной сети, а также к любой части такой сети между электростанцией или станциями и нагрузкой или потребителем. Термин «кабель» или «электрический кабель» может относиться к любому отдельному кабелю или проводу сети, например к фазонесущему кабелю.
Термин «кабельное устройство» может относиться к любому устройству, которое должно быть монтировано на электрический кабель сети или демонтировано с него, включая датчик, измерительное устройство, устройство связи, предупреждающее устройство, маркировочное устройство и т.д. Как правило, кабельное устройство может получать энергию из электрического и/или магнитного поля вокруг электрического кабеля, где электрическое и/или магнитное поле может создаваться электрическим током, протекающим в электрическом кабеле.
Термин «летательный аппарат» может относиться к любому типу устройства, которое может летать или зависать, а также может нести кабельное устройство и монтировать его на электрический кабель или снимать с него. В частности, летательный аппарат может включать в себя любой тип беспилотного летательного аппарата, например дрон, коптер, квадрокоптер и т.д. Летательный аппарат может управляться дистанционно, автономно или и тем, и другим (в разных частях полета, как описано ниже).
Термин «измерение» или «электрическое измерение» может относиться к любому типу измерения любого электрического параметра, такого как напряжение, ток, электрическое поле, магнитное поле, сопротивление, емкость, индуктивность, электрический заряд и т.д. Термин «физическое измерение» или «механическое измерение» может относиться к любому типу измерения любого физического параметра, кроме электрических. Такими параметрами могут быть температура, ветер, влажность, движение, высота, углы (кабель), угол (кабель) и т.д. Такие измерения обычно выполняются кабельным устройством, установленным на электрическом кабеле.
На фиг.1 показан упрощенный вид летательного аппарата 10, устанавливающего кабельное устройство 11 на электрическом кабеле 12 электрической сети 13, согласно одному примерному варианту осуществления изобретения.
Как показано на фиг.1, летательный аппарат 10 может включать в себя воздушную двигательную установку и монтажную часть 14. Воздушная двигательная установка может включать, например, один или более пропеллеров 15. Пропеллеры 15 могут приводиться в действие, например, с помощью электрических двигателей, которыми может управлять первая система навигации. Однако альтернативно и/или дополнительно воздушная двигательная установка может работать с одним или более двигателей внутреннего сгорания и/или включать один или более реактивных двигателей, турбореактивных двигателей, турбовинтовых реактивных двигателей и т.д. Воздушная двигательная установка может включать любое количество двигателей и/или пропеллеров, обычно 4 или 8.
Монтажная часть 14 может быть встроенной частью летательного аппарата 10 (то есть неотъемлемой монтажной частью 14). В качестве альтернативы, монтажная часть 14 может быть отдельным устройством, которое может быть прикреплено, соединено или закреплено на различных типах летательных аппаратов 10 (то есть съемной монтажной частью 14).
Съемная монтажная деталь 14 устраняет необходимость в проектировании и производстве всего летательного аппарата 10 и позволяет использовать имеющийся в наличии летательный аппарат 10. Кроме того, съемная монтажная деталь 14 позволяет одному летательному аппарату 10 нести две или более монтажных частей 14. Однако для съемной монтажной части 14 требуется (первое) соединительное устройство 16, в котором встроенная монтажная часть 14 может не нуждаться.
В целях общности описания следует понимать, что на фиг.1 может также быть показан летательный аппарат 10, демонтирующий кабельное устройство 11 с электрического кабеля 12 электрической сети 13. Следовательно, летательный аппарат 10 и монтажная часть 14 вместе служат для монтирования кабельного устройства 11 на электрический кабель 12 электрической сети 13 и для демонтирования кабельного устройства 11 с электрического кабеля 12 электрической сети 13.
На фиг.1 также показано другое кабельное устройство 11, обозначенное номером позиции 17, уже монтированное на другом кабеле 12 электрической сети 13.
Как показано на фиг.1, монтирование кабельного устройства 11 на электрический кабель 12 может включать в себя вставление кабеля в монтажную прорезь 18 в кабельном устройстве 11. Другими словами, монтирование кабельного устройства 11 на электрический кабель 12 может включать направление монтажной прорези 18 кабельного устройства 11 на электрический кабель 12. Иначе говоря, монтирование кабельного устройства 11 на электрический кабель 12 может включать направление и/или осуществление навигации летательного аппарата 10 (и монтажной части 14) к электрическому кабелю 12, так что прорезь 18 кабельного устройства 11 охватывает электрический кабель 12. После этого монтажная часть 14 может приводить в действие зажимное устройство (часть зажима кабеля) в кабельном устройстве 11 для фиксации кабельного устройства 11 на электрическом кабеле 12.
Точно так же демонтирование кабельного устройства 11 с электрического кабеля 12 может включать в себя направление и/или осуществление навигации летательного аппарата 10 (и монтажной части 14) к выбранному кабельному устройству 11, монтированному на электрическом кабеле 12, прикрепление монтажной части 14 к выбранному кабельному устройству 11, управление зажимным устройством (часть зажима кабеля) внутри кабельного устройства 11 для отсоединения кабельного устройства 11 от электрического кабеля 12 и снятия кабельного устройства 11 с электрического кабеля 12.
Как показано на фиг.1, монтажная часть 14 может включать в себя следующие части:
первая соединительная часть, такая как соединительное устройство 16, предназначенная для прикрепления монтажной части 14 к летательному аппарату 10. Данная первая соединительная часть может также называться частью присоединения коптера;
вторая соединительная часть, такая как рычаги 19, предназначенная для крепления кабельного устройства 11 к монтажной части 14. Данная вторая соединительная часть может также называться частью присоединения датчика;
часть навигации (которая также может называться второй частью навигации и/или частью навигации ближнего действия, и/или частью части навигации прорези), включающая в себя по меньшей мере один навигационный датчик, такой как камера 20, приспособленный для выполнения по меньшей мере одного из:
предоставление пользователю возможности монтировать кабельное устройство 11 на электрическом кабеле 12 электрической сети 13, осуществляя навигацию летательного аппарата 10 так, чтобы направить прорезь 18 кабельного устройства 11 к электрическому кабелю 12, чтобы прорезь 18 была выровнена с электрическим кабелем 12;
предоставление пользователю возможности демонтировать кабельное устройство 11 с электрического кабеля 12 электрической сети 13 путем осуществления навигации летательного аппарата 10 к кабельному устройству 11, чтобы летательный аппарат 10 был выровнен с кабельным устройством 11;
автоматическая навигация летательного аппарата для направления прорези 18 кабельного устройства 11 к электрическому кабелю 12, чтобы прорезь 18 была выровнена с электрическим кабелем 12;
автоматическая навигация летательного аппарата 10 к кабельному устройству 11, чтобы летательный аппарат 10 был выровнен с кабельным устройством 11.
На фиг.2 показан упрощенный вид спереди монтажной части 14, на фиг.3 показан упрощенный вид сбоку монтажной части 14, на фиг.4 показан упрощенный вид снизу монтажной части 14, и на фиг.5 показан упрощенный вид в аксонометрии монтажной части 14, причем на всех из них проиллюстрирован один примерный вариант осуществления изобретения.
Как вариант, иллюстрации на фиг.2, 3, 4 и 5 можно рассматривать в контексте деталей предыдущих чертежей. Конечно, однако, иллюстрацию с фиг.5 можно рассматривать в контексте любого требуемого варианта осуществления. Кроме того, вышеупомянутые определения могут в равной степени применяться к приведенному ниже описанию. На фиг.2, 3, 4 и 5 показана монтажная часть 14 с кабельным устройством 11.
Как показано на фиг.2, 3, 4 и 5, монтажная часть 14 может включать в себя корпус 21, обычно включающий в себя электронное устройство, обычно включая вычислительное устройство, такое как микроконтроллер, приспособленное, среди других устройств, для: второй соединительной части, такой как рычаги 19, соединенные с корпусом 21 и приспособленные для присоединения кабельного устройства 11 к части 22 навигации, включающей по меньшей мере один навигационный датчик, например камеру 20. Часть 23 активации крепления кабеля, соединенная с корпусом 21, приспособлена для активации части 24 зажима кабеля в кабельном устройстве 11.
На фиг.6 показан упрощенный вид вычислительного устройства 25, обычно включенного в корпус 21, согласно одному примерному варианту осуществления изобретения.
Как вариант, иллюстрации на фиг.6 можно рассматривать в контексте деталей предыдущих чертежей. Конечно, однако, иллюстрацию с фиг.6 можно рассматривать в контексте любого требуемого варианта осуществления. Кроме того, вышеупомянутые определения могут в равной степени применяться к приведенному ниже описанию.
Вычислительное устройство 25 представлено как пример реализации части обработки монтажной части 14. Таким образом, вычислительное устройство 25 может быть выполнено с возможностью управления второй соединительной частью, такой как рычаги 19, частью 22 навигации и частью 23 активации крепления кабеля, а также другими устройствами, присоединенными или включенными в монтажную часть 14 и/или корпус 21, такой как показанный на фиг.1-5 и раскрытый в описании к ним.
Как показано на фиг.6, вычислительное устройство 25 может включать в себя, по меньшей мере, один процессорный блок 26, один или более модулей 27 памяти (например, оперативную память (RAM), энергонезависимую память, такую как флэш-память и т.д.), один или более модулей 28 хранения (например, включая жесткий диск и/или съемный накопитель, представляющий дисковод гибких дисков, дисковод на магнитной ленте, дисковод компакт-дисков, устройство флэш-памяти и т.д.).
Вычислительное устройство 25 может также включать:
один или более блоков 29 связи. Такой блок 29 связи может использовать любой тип технологии связи, в частности технологию связи RF, в частности, технологию связи, такую как Wi-Fi, Bluetooth, ZigBee, и любую технологию связи с удаленным управлением, которая может использоваться для удаленного управления летательным аппаратом 10;
одну или более схем 30 управления вторым соединением для управления второй соединительной частью, например рычагами 19. В частности, маневрирующие рычаги 19 для высвобождения кабельного устройства 11 и/или для выравнивания с кабельным устройством 11 и/или для крепления к кабельному устройству 11;
одну или более схем 31 управления навигационными датчиками для управления навигационными датчиками, такими как камеры 20, опционально, включая сами навигационные датчики 32;
одну или более схем 33 управления присоединением кабеля для управления частями 23 активации крепления кабеля, а также самими частями 23 активации крепления кабеля;
одну или более шин 34 связи, соединяющих вышеуказанные блоки;
вычислительное устройство 25 может также включать в себя одну или более схем управления для управления другими устройствами, подключенными к корпусу 21 или включенными в него.
Вычислительная система 25 может также включать в себя одну или более компьютерных программ 35 или логических алгоритмов компьютерного управления, которые могут храниться в любом из блоков 27 памяти и/или блоков 28 хранения. Такие компьютерные программы при исполнении позволяют вычислительной системе 25 выполнять различные функции, как изложено в данном документе. Блоки 27 памяти и/или блоки 28 хранения и/или любые другие запоминающие устройства являются возможными примерами материальных машиночитаемых носителей.
В частности, компьютерные программы 35 могут включать в себя программное обеспечение для:
работы и/или управления блоком (блоками) 29 связи;
работы и/или управления устройствами, соединенными с корпусом 21 или включенные в него, такими как вторая соединительная часть, такая как рычаги 19, часть 22 навигации, навигационный датчик 32, такой камера 20, часть 23 активации крепления кабеля и т.д;
связи с пользователем, управляющим летательным аппаратом 10 (оператором);
связи с вычислительной системой и/или одной или более компьютерных программ, работающих с и/или управляющих летательным аппаратом 10;
связи с вычислительной системой и/или одной или более компьютерных программ, работающих и/или управляющих кабельным устройством 11;
навигации летательного аппарата 10 и/или монтажной части 14, и/или кабельного устройства 11 к кабелю 12, чтобы монтировать кабельное устройство 11 на кабеле 12;
навигации летательного аппарата 10 и/или монтажной части 14 к кабельному устройству 11, монтированному на кабеле 12, и демонтирования кабельного устройства 11 с кабеля 12;
вычислительная система 25 может исполнять любое программное обеспечение, например, для анализа измерений, выполненных любым одним или более кабельных устройств 11 с фиг.1-5;
работы и/или управления устройствами, соединенными с корпусом 21 или включенными в него, такими как вторая соединительная часть, такая как рычаги 19, часть 22 навигации, навигационный датчик, такой камера 20, часть 23 активации крепления кабеля и т.д.
Например, монтажная часть 14, и/или вычислительная система 25, и/или компьютерные программы 35 могут выполнять следующее:
предоставлять пользователю возможность управлять летательным аппаратом 10 для осуществления навигации летательного аппарата 10 к электрической сети 13, например, к определенной части электрической сети 13;
предоставлять пользователю возможность управлять летательным аппаратом 10 для идентификации конкретного электрического кабеля 12 электрической сети 13 и/или конкретного кабельного устройства 11, монтированного на конкретном электрическом кабеле 12;
предоставлять пользователю возможность управлять летательным аппаратом 10 для выравнивания прорези 18 кабельного устройства 11 с конкретным электрическим кабелем 12;
обеспечивать зацепление кабельного устройства 11 с электрическим кабелем 12 и монтировать кабельное устройство 11 на электрическом кабеле 12, включая зажим кабельного устройства 11 на электрическом кабелем 12. Данный этап может выполняться автоматически монтажной частью 14, и/или вычислительной системой 25, и/или компьютерными программами 35, принимающими управление летательным аппаратом 10 от оператора;
предоставлять пользователю возможность управлять летательным аппаратом 10 для выравнивания летательного аппарата 10, и/или монтажной части 14, и/или второй соединительной части, и/или рычагов 19, с конкретным кабельным устройством 11, монтированным на электрическом кабеле 12;
обеспечить зацепление монтажной части 14 с кабельным устройством 11;
обеспечить разжимание и/или демонтирование и/или снятие кабельного устройства 11 с электрического кабеля 12. Данный этап также может выполняться автоматически монтажной частью 14 и/или вычислительной системой 25 и/или компьютерными программами 35, принимающими управление летательным аппаратом 10 от оператора.
Для точного выравнивания прорези 18 кабельного устройства 11 с электрическим кабелем 12 монтажная часть 14 может управлять летательным аппаратом 10 напрямую, например, путем передачи сигналов связи, имитирующих устройство удаленного управления, которое может использоваться пользователем/оператором. Аналогичным образом монтажная часть 14 может управлять летательным аппаратом 10 напрямую для точного выравнивания второй соединительной части, такой как рычаги 19, с кабельным устройством 11, монтированным на электрическом кабеле 12. Монтажная часть 14 может управлять летательным аппаратом 10 путем передачи сигналов связи, имитирующих устройство удаленного управления, через блок 29 связи.
Монтажная часть 14 может управлять летательным аппаратом 10 посредством блока 29 связи в качестве устройства локальной связи, приспособленного коммуникативно соединяться с системой локального управления летательным аппаратом 10 для автоматического управления летательным аппаратом 10.
Монтажная часть 14 может подключаться к электрическому кабелю 12 с использованием оптического изображения, например, оптическое изображение может быть получено с одного или более оптических датчиков, таких как камера (камеры) 20, и обработано процессорным блоком 26 и компьютерной программой 35. Альтернативно или дополнительно навигация монтажной части 14 к электрическому кабелю 12 может быть выполнена с использованием электрических датчиков, считывающих электрическое и/или магнитное поле, создаваемое электрическим током в электрическом кабеле 12. Оптическая навигация полезна, когда электрический кабель 12 не пропускает электрический ток, а электромагнитная навигация полезна в сложных оптических условиях, таких как темнота, чрезмерная яркость, неблагоприятный фон и т.д. Другие способы навигации могут включать в себя считывание температуры кабеля, считывание близости и т.д.
Монтажная часть 14 может подключаться к электрическому кабелю 11 с использованием оптического изображения, например, оптическое изображение может быть получено с одного или более оптических датчиков, таких как камера 20, и обработано процессорным блоком 26 и компьютерной программой 35. Альтернативно или дополнительно навигация монтажной части 14 к электрическому кабелю 11 может быть выполнена с использованием электрических датчиков, считывающих электрическое и/или магнитное поле, создаваемое электрическим током в электрическом кабеле 12. Альтернативно или дополнительно навигация монтажной части 14 к кабельному устройству 11 может быть выполнена с использованием других типов радиочастотных (RF) датчиков, считывающих радиочастотный сигнал, излучаемый кабельным устройством 11, например, посредством устройства радиочастотной идентификации (RFID), что позволяет осуществлять навигацию к непитаемому и/или неработающему и/или неисправному кабельному устройству 11.
Для этой цели система использования летательного аппарата для монтирования датчика на электрический кабель или демонтирования с него также включает пульт удаленного управления, управляемый пользователем или оператором. Устройство удаленного управления может включать в себя две части: первую часть удаленного управления для управления летательным аппаратом 10 и вторую часть удаленного управления для управления монтажной частью 14, например, через блок 29 связи. Понятно, что две части управления могут быть объединены в одном устройстве удаленного управления. Понятно, что устройство удаленного управления может быть специализированным устройством или устройством общего назначения, таким как смартфон.
Монтажная часть 14, например, через блок 29 связи, может обеспечивать удаленное управление, в частности, но не исключительно, вторую часть удаленного управления, навигационными данными и принимать от удаленного управления данные управления навигацией.
Данные навигации могут включать в себя, например, данные изображений с одной или более камер 20 и/или с одного или более электромагнитных датчиков и/или идентификационный сигнал кабельного устройства 11, различные управляющие сигналы, связанные с работой система крепления кабеля и др.
Данные управления навигацией могут включать в себя, например, выбор конкретного электрического кабеля 12 электрической сети 13, выбор конкретного местоположения на выбранном электрическом кабеле 12, выбранную ориентацию кабельного устройства 11 на электрическом кабеле 12 (например, согласно направлению электрического тока) и др.
Данные управления навигацией также могут включать в себя, например, команду для монтажной части 14, чтобы взять на себя управление летательным аппаратом 10 и выполнить автоматическую навигацию, как описано выше, путем управления летательным аппаратом 10 напрямую.
Как описано выше, пользователь или оператор, управляющий системой, описанной выше, и, в частности, управляющий устройством удаленного управления, описанным выше, может дать команду монтажной части 14 задействовать часть 23 активации крепления кабеля для присоединения кабельного устройства 11 к электрическому кабелю 12 или отсоединения кабельного устройства 11 от электрического кабеля 12, как описано ниже.
RFID, встроенное в кабельное устройство 11, может содержать уникальную идентификацию устройства и при считывании монтажной частью 14 может использоваться для положительной проверки снятия надлежащего устройства 11 с кабеля.
На фиг.7 показан упрощенный вид в разрезе кабельного устройства 11, монтированного на электрическом кабеле 12, согласно одному примерному варианту осуществления изобретения.
Как вариант, вид кабельного устройства 11 с фиг.7 можно рассматривать в контексте деталей предыдущих чертежей. Конечно, однако, вид кабельного устройства 11 с фиг.7 можно рассматривать в контексте любого требуемого варианта осуществления. Кроме того, вышеупомянутые определения могут в равной степени применяться к приведенному ниже описанию.
Как показано на фиг.7, кабельное устройство 11 может включать в себя коробку или корпус 36, через которые проходит электрический кабель 12. Электрический кабель 12 может быть частью электрической сети, сети передачи электроэнергии или сети распределения электроэнергии, например, обслуживаемой энергокомпанией для обеспечения электричеством населения, промышленных предприятий и т.д. Таким образом, кабельное устройство 11 может быть монтировано на токоведущем кабеле 12. То есть, когда кабель 12 полностью запитан и/или несет электрическое напряжение и/или электрический ток.
Коробка 36 поэтому состоит из двух частей, которые можно открывать, а затем закрывать вокруг кабеля 12. В качестве альтернативы коробка 36 может быть сконструирована из одной части, окружающей большую часть диаметра кабеля и имеющей отверстие на одной стороне, например прорезь 18, для вставления кабеля 12 и крепления коробки к кабелю 12.
Как показано на фиг.7, кабельное устройство 11 может включать в себя модуль 37 источника питания, модуль 38 контроллера, одно или более электрических измерительных устройств 39, одно или более физических измерительных устройств 40 и модуль 41 обратной связи. Опционально, кабельное устройство 11 может также включать в себя модуль 42 локальной связи, модуль 43 удаленного считывания и модуль 44 управления перемещением. Опционально, кабельное устройство 11 может также включать в себя часть 24 зажима кабеля и модуль 45 GPS.
Как показано на фиг.7, кабельное устройство 11 может включать в себя магнитопровод 46, на который намотана по меньшей мере одна катушка с образованием обмотки 47. Магнитопровод 46 может быть монтирован вокруг электрического кабеля 12. Магнитопровод 46 может быть сконструирован из двух частей, по одной в каждой из двух частей коробки 36, причем две части магнитопровода 46 закрыты вокруг электрического кабеля 12, когда коробка 36 присоединена к электрическому кабелю 12. Однако, опционально, и особенно для высоковольтного кабеля, магнитопровод 46 может быть открытым в том смысле, что в нем есть прорезь, через которую можно вставить электрический кабель 12.
Магнитопровод 46 обычно создает магнитное поле от электрического тока, протекающего по электрическому кабелю 12. Обмотка 12 обычно получает электрический ток из магнитного потока в магнитопроводе 46. Обмотка 12 может быть электрически соединена с модулем 37 источника питания, обычно обеспечивая электрическое напряжение для других модулей кабельного устройства 46. Понятно, что кабельное устройство 11 может получать электроэнергию от одного электрического кабеля 12.
В качестве альтернативы, например, при использовании с изолированными высоковольтными кабелями и/или подземными кабелями и/или низковольтными сетями, модуль 37 источника питания может быть подключен к датчикам, прикрепленным к электрическим кабелям, получающим питание от основного блока, подключенного к выходу низковольтного напряжения трансформатора. Такая конфигурация кабельного устройства 11 может иметь только одну часть с отверстием внизу.
Модуль 41 обратной связи и модуль 42 локальной связи могут быть соединены, каждый и/или оба, с одной или более антенн 48. Модуль 19 удаленного считывания может быть соединен с различными датчиками, одной или более камер 49, одним или более микрофонов 50 и т.д. и управлять ими. Понятно, что камера может быть установлена на системе осей, обеспечивающих трехмерное вращение. В качестве альтернативы, можно монтировать множество или массив фиксированных камер для покрытия большого поля обзора по мере необходимости.
Модуль 41 обратной связи и модуль 42 локальной связи могут использовать любой тип технологии связи и/или сети связи, например, но без ограничения: термины «технология связи» или «сеть связи» или просто «сеть» относятся к любому типу среды связи, включая, помимо прочего, фиксированную (проводную, кабельную) сеть, беспроводную сеть и/или спутниковую сеть, фиксированную или беспроводную глобальную сеть (WAN), включая различные типы сотовых сетей, фиксированную или беспроводную локальную сеть (LAN), включая Wi-Fi, и персональную сеть (PAN), фиксированную или беспроводную, включая Bluetooth, ZigBee и NFC, технологию связи по линии электропередач (PLC) и т.д. Термины «сеть связи» или «сеть» могут относиться к любому количеству сетей и любой комбинации сетей и/или технологий связи.
Опционально, кабельное устройство 11 может также включать в себя модуль 45 службы глобального позиционирования (GPS) и может использовать его для измерения, отслеживания и/или управления положением кабельного устройства 11 по электрическому кабелю 12. Модуль 45 GPS может также обеспечивать точные универсальные часы, например, для точного определения абсолютного времени измерения.
Модуль 14 контроллера может включать в себя процессор, один или более модулей памяти (например, оперативную память (RAM), энергонезависимую память, такую как флэш-память и т.д.), один или более модулей хранения (например, включая жесткий диск диск и/или съемный накопитель и т.д.), которые могут использоваться для хранения и/или выполнения программы и связанных данных, а также для связи с внешними устройствами. Модуль 14 контроллера может быть выполнен как вычислительное устройство 25 с фиг.6.
Модуль 44 управления перемещением может быть соединен с одним или более активирующих устройств, такими как электродвигатель 51, который может быть соединен с одним или более колес 52. На кабеле 12 могут быть установлены колеса 52, чтобы позволить модулю 44 управления перемещением перемещать кабельное устройство 11 вдоль кабеля 12 путем управления электродвигателем 51.
Понятно, что двигательная установка кабельного устройства 11 (включая, но не ограничиваясь этим, модуль 44 управления движением, один или более электродвигателей 51, одно или более колес 52 и т.д.) может быть приспособлено для перемещения кабельного устройства 11 вдоль кабеля 12 и/или повернуть кабельное устройство 11 вокруг кабеля 12.
Понятно, что электродвигатель 51 представляет здесь любой тип технологии, подходящей для маневрирования кабельного устройства 11 вдоль и/или вокруг кабеля 12, включая, но без ограничения, электродвигатель переменного тока, электродвигатель постоянного тока, шаговый электродвигатель, пневматический насос и/или двигатель, гидравлический насос и/или двигатель, или любой другой тип актуатора.
Часть 24 зажима кабеля может включать, например, часть 53 держателя кабеля, которая может быть прижата к кабелю 12, чтобы надежно прикрепить кабельное устройство 11 к кабелю 12. Часть 53 держателя кабеля может перемещаться (например, вверх и вниз) электрическими средствами и/или механическими средствами, такими как резьбовой стержень 54. Резьбовой стержень 54 может приводиться в действие электрическим актуатором или, как показано на фиг.7, валом 55, вставленным в гнездо части 23 активации крепления кабеля. В качестве альтернативы резьбовой стержень 54 может приводиться в действие стержнем, вставленным в гнездо 56.
На фиг.8А показан упрощенный вид части 24 зажима кабеля в открытом положении, и на фиг.8В показан упрощенный вид части 24 зажима кабеля в закрытом положении, согласно одному примерному варианту осуществления изобретения.
Как вариант, иллюстрации с фиг.8а и 8В можно рассматривать в контексте деталей предыдущих чертежей. Конечно, однако, иллюстрацию с фиг.8а и 8В можно рассматривать в контексте любого требуемого варианта осуществления. Кроме того, вышеупомянутые определения могут в равной степени применяться к приведенному ниже описанию.
Как показано на фиг.8А и 8В, поворот резьбового стержня 54 (например, против часовой стрелки) для отсоединения кабельного устройства 11 от кабеля 12, например, путем перемещения (опускания) части 53 держателя кабеля от кабеля 12, в конечном итоге также поворачивает часть 53 держателя кабеля, чтобы освободить прорезь 18, так что кабельное устройство 11 можно отсоединить от кабеля 12. Как показано на фиг.8А, часть 53 держателя кабеля при полном открытии превращается в отверстие 57, где она может быть считана как полностью открытая, например, камерой 20.
Кабельное устройство 11 и, в частности, часть 24 зажима кабеля может включать в себя один или более датчиков для считывания и/или проверки того, что кабельное устройство 11 правильно монтировано на электрическом кабеле 12, и/или что часть 53 держателя кабеля правильно заблокирована или деблокирована. Такими датчиками может управлять модуль 38 контроллера кабельного устройства 11, который может сообщать свои измерения процессорному блоку 26 монтажной части 14, как показано на фиг.6 и раскрыто в описании к ней.
Процессорный блок 26 монтажной части 14 и модуль 38 контроллера кабельного устройства 11 могут связываться, например, с использованием блока 29 связи монтажной части 14 и модуля 42 локальной связи кабельного устройства 11.
Монтажная часть 14 может подавать электроэнергию в кабельное устройство 11 через соединитель, за счет электромагнитной индукции или с помощью лазерного излучения. Например, монтажная часть 14 может подавать электроэнергию в кабельное устройство 11 через один или более соединителей в рычагах 19.
На фиг.9А показан упрощенный вид спереди летательного аппарата 10 и встроенной монтажной части 14, несущей кабельное устройство 11 под летательным аппаратом 10, и на фиг.9В показан упрощенный вид сбоку системы с фиг.9А согласно одному примерному варианту осуществления изобретения.
Как вариант, иллюстрации с фиг.9А и 9В можно рассматривать в контексте деталей предыдущих чертежей. Конечно, однако, иллюстрацию с фиг.9А и 9В можно рассматривать в контексте любого требуемого варианта осуществления. Кроме того, вышеупомянутые определения могут в равной степени применяться к приведенному ниже описанию.
Как показано на фиг.9А и 9В, помимо первого устройства навигации, включенного в летательный аппарат 10, и/или монтажной части 14 (например, части 22 навигации), есть второе устройство 58 навигации, включенное в кабельное устройство 11. Второе устройство 58 навигации можно использовать для навигации летательного аппарата 10 вблизи электрического кабеля 12. В примере, показанном на фиг.9А и 9В, (второе) устройство 58 навигации вблизи включает в себя четыре датчика 59 для точного выравнивания кабельного устройства 11 с кабелем 12. Датчики 59 могут быть датчиками формирования изображения (например, камерой, ультразвуком и т.д.), датчиками тепла, электромагнитными датчиками и т.д.
Как показано на фиг.9А и 9В, кабельное устройство 11 может быть установлено под летательным аппаратом 10 с его прорезью 18, открытой вниз. Затем летательный аппарат 10 может приближаться к электрическому кабелю 12 сверху, вставляя электрический кабель 12 в прорезь 18 снизу.
На фиг.10 показан упрощенный вид спереди летательного аппарата 10 и встроенной монтажной части 14, несущей кабельное устройство 11 над летательным аппаратом 10, согласно одному примерному варианту осуществления изобретения.
Как вариант, иллюстрации на фиг.10 можно рассматривать в контексте деталей предыдущих чертежей. Конечно, однако, иллюстрацию с фиг.10 можно рассматривать в контексте любого требуемого варианта осуществления. Кроме того, вышеупомянутые определения могут в равной степени применяться к приведенному ниже описанию.
Система с фиг.10 отличается от системы на фиг.9А и 9В тем, что кабельное устройство 11 может быть установлено над летательным аппаратом 10 с его прорезью 18, открытой вверх. Поэтому летательный аппарат 10 приближается к электрическому кабелю 12 снизу, и тогда электрический кабель 12 может быть вставлен в прорезь 18 сверху. Данная конфигурация может быть предпочтительна с точки зрения аэродинамики, например, если ветер отталкивает летательный аппарат 10 при зацеплении с электрическим кабелем 12.
На фиг.11 показан упрощенный вид спереди летательного аппарата 10 и встроенной монтажной части 14, несущей кабельное устройство 11 над летательным аппаратом 10 с одним или более смотрящими внутрь (вниз) (вторыми) устройствами 58 навигации вблизи согласно одному примерному варианту осуществления изобретения.
Как вариант, иллюстрации с фиг.11 можно рассматривать в контексте деталей предыдущих чертежей. Конечно, однако, иллюстрацию с фиг.11 можно рассматривать в контексте любого требуемого варианта осуществления. Кроме того, вышеупомянутые определения могут в равной степени применяться к приведенному ниже описанию.
Система с фиг.11 отличается от системы на фиг.10 (а также системы на фиг.9А и 9В) тем, что (второе) устройство 58 навигации вблизи установлено на монтажной части 14 (и летательном аппарате 10) вместо кабельного устройства 11. Как показано на фиг.11, (второе) устройство 58 навигации вблизи установлено таким образом, чтобы смотреть внутрь и/или вниз, и/или в прорезь 18 кабельного устройства 11.
Следовательно, система с фиг.11 имеет аэродинамические свойства системы с фиг.10, однако нет необходимости включать (второе) устройство 58 навигации вблизи в каждое кабельное устройство 11.
Кабельное устройство 11 может быть монтировано над летательным аппаратом 10 с его прорезью 18, открытой вверх. Следовательно, летательный аппарат 10 приближается к электрическому кабелю 12 снизу, и, таким образом, электрический кабель 12 может быть вставлен в прорезь 18 сверху под управлением (второго) устройства 58 навигации вблизи, смотрящего вниз.
На фиг.12 показан упрощенный вид сбоку летательного аппарата 10 и встроенной монтажной детали 14, несущей кабельное устройство 11 с устройством 60 навигации дальнего действия и устройством 61 навигации ближнего действия, а также устройством 62 точного маневрирования согласно одному примерному варианту осуществления изобретения.
Как вариант, иллюстрации с фиг.12 можно рассматривать в контексте деталей предыдущих чертежей. Конечно, однако, иллюстрацию с фиг.12 можно рассматривать в контексте любого требуемого варианта осуществления. Кроме того, вышеупомянутые определения могут в равной степени применяться к приведенному ниже описанию.
Как показано на фиг.12, система летательного аппарата 10 и встроенная монтажная часть 14 также могут включать в себя первое устройство 60 навигации дальнего действия и второе устройство 61 навигации ближнего действия. Эти две системы могут быть оснащены собственными датчиками. Как показано на фиг.12, первое устройство 60 навигации дальнего действия включает в себя датчики изображения, такие как камеры 63, направленные наружу, от кабельного устройства 11, а второе устройство 61 навигации ближнего действия включает датчики изображения, такие как камеры. 64, направлен внутрь, к кабельному устройству 11, в частности, к прорези 18 кабельного устройства 11.
Первое, устройство 60 навигации дальнего действия может позволить пользователю с помощью пульта удаленного управления перемещать систему летательного аппарата 10 и встроенную монтажную часть 14 к электросети 13, затем к конкретному электрическому кабелю 12, а затем к конкретному месту или части электрического кабеля 12. После этого второе устройство навигации ближнего действия 61 может позволить пользователю, используя тот же или другой пульт удаленного управления, осуществлять навигацию системы летательного аппарата 10, встроенной монтажной части 14 и кабельного устройства 11, так что электрический кабель 12 вставляется в прорезь 18 кабельного устройства 11.
Дополнительно и/или опционально, второе устройство 61 навигации ближнего действия может также включать в себя датчики, такие как камеры 65, ориентированные в сторону места на кабельном устройстве 11, причем вторая соединительная часть (например, рычаги 19) прикрепляется к кабельному устройству 11.
Первое устройство 60 навигации дальнего действия может позволить пользователю с помощью пульта удаленного управления перемещать систему летательного аппарата 10 и встроенную монтажную часть 14 к электросети 13, затем к конкретному электрическому кабелю 12, а затем к кабельному устройству, монтированному на электрическом кабеле 12. После этого второе устройство 61 навигации ближнего действия может позволить пользователю, используя тот же или другой пульт удаленного управления, осуществлять навигацию системы летательного аппарата 10 и встроенной монтажной части 14, так что вторая соединительная часть (например, рычаги 19) надлежащим образом выравниваются с кабельным устройством 11 и прикрепляются к нему.
Понятно, что первое устройство 60 навигации дальнего действия и/или второе устройство 61 навигации ближнего действия может использовать любой тип или комбинацию типов датчиков, как описано выше.
Понятно, что первое устройство 60 навигации дальнего действия и второе устройство 61 навигации ближнего действия могут иметь перекрывающийся диапазон, в котором обе системы работают, и где может выполняться переключение между системами, либо вручную, либо автоматически. Например, в пределах диапазона перекрытия обе системы обладают достаточной точностью и контролем маневренности.
Понятно, что последняя часть полета летательного аппарата 10 с использованием части навигации дальнего действия может использоваться для включения части навигации ближнего действия с помощью электрического кабеля (для монтирования) или с помощью кабельного устройства (для демонтирования).
Дополнительно и/или опционально, система летательного аппарата 10 и встроенная монтажная часть 14 могут также включать в себя устройство 62 точного маневрирования, обычно включающее в себя актуаторы маневрирования, такие как один или более пропеллеров 66. Устройство 62 точного маневрирования может позволить пользователю с помощью пульта удаленного управления осуществлять точную навигацию системы летательного аппарата 10 и встроенной монтажной части 14 к электрическому кабелю 12 (для монтирования кабельного устройства 11) и/или к кабельному устройству 11 (для демонтирования), с минимальным влиянием на углы тангажа и крена.
На фиг.13 показан упрощенный вид сбоку летательного аппарата 10 и съемной монтажной детали 14, оснащенной устройством 60 навигации дальнего действия и устройством 61 навигации ближнего действия, а также устройством 62 точного маневрирования согласно одному примерному варианту осуществления изобретения.
Как вариант, иллюстрации с фиг.13 можно рассматривать в контексте деталей предыдущих чертежей. Конечно, однако, иллюстрацию с фиг.13 можно рассматривать в контексте любого требуемого варианта осуществления. Кроме того, вышеупомянутые определения могут в равной степени применяться к приведенному ниже описанию.
Система летательного аппарата 10 и прикрепленная монтажная часть 14 с фиг.13 отличается от системы летательного аппарата 10 и встроенной монтажной части 14 с фиг.12 тем, что устройство 60 навигации дальнего действия, устройство 61 навигации ближнего действия, как а также устройство 62 точного маневрирования являются частью прикрепленной монтажной части 14 и, таким образом, могут передаваться с одного летательного аппарата 10 на другой с помощью первой соединительной части, такой как соединительное устройство 16.
Понятно, что система монтирования датчика кабеля, такая как описанная здесь, обычно включает в себя летательный аппарат, такой как летательный аппарат 10, и монтажную часть, такую как монтажная часть 14, которая может быть выполнена за одно целое с летательным аппаратом 10 или быть прикрепленной к летательному аппарату 10. Система крепления датчика кабеля может иметь две системы навигации, обычно систему навигации дальнего действия и систему навигации ближнего действия.
Система навигации дальнего действия используется для навигации летательного аппарата 10 к сети 13 и к конкретному электрическому кабелю 12 (месту на нем), а система навигации ближнего действия используется для точного выравнивания устройства 11 с электрическим кабелем 12. В частности, при монтировании устройства 11 на электрическом кабеле 12 система навигации ближнего действия используется для точного выравнивания прорези 18 (или аналогичного средства крепления кабеля устройства 11) с электрическим кабелем 12. Аналогичным образом, при демонтировании устройства 11 с электрического кабеля 12 система навигации ближнего действия используется для точного выравнивания летательного аппарата 10 и монтажной части 14 с устройством 11.
Например, система навигации дальнего действия может быть собственной системой навигации летательного аппарата 10, а система навигации ближнего действия может быть частью монтажной части 14, такой как часть 22 навигации и камера 20, как показано на фиг.1-5, а также фиг.9А, 9В, 10 и 11, и раскрыто в описании к ним.
В качестве альтернативы, например, как показано на фиг.12 и 13 и раскрыто в описании к ним, монтажная часть 14 может включать в себя как систему навигации дальнего действия, такую как элементы 60 и 63, так и систему навигации ближнего действия, такую как элементы 61 и 64.
Понятно, что прорезь 18 шире, чем электрический кабель 12, обычно всего на несколько миллиметров, и поэтому требуемая точность системы навигации ближнего действия, а также сопутствующего устройства 62 точного маневрирования составляет лишь несколько миллиметров, обычно меньше половины разницы между шириной прорези 18 и шириной электрического кабеля 12.
Точность или прецизионность системы навигации ближнего действия и устройства точного маневрирования включает точность (или прецизионность) определения местоположения, как описано выше, и точность (или прецизионность) выравнивания, которая обычно должна быть выше Sin (0,01) или 0,01 радиана.
Поэтому, например, диапазон датчика системы навигации дальнего действия может иметь длинный фокус, обычно считывающий, например, площадь по меньшей мере десятков квадратных метров с обычным разрешением около одного сантиметра. Дальность действия считывания системы навигации ближнего действия может иметь короткий фокус, обычно считывающий площадь менее нескольких десятков квадратных сантиметров, с типичным разрешением по меньшей мере 0,1 миллиметра.
Точно так же система маневрирования дальнего действия летательного аппарата 10 может иметь точность (или прецизионность), равную 1 сантиметру или меньше, и/или рыскание и/или тангаж и/или крен не выше 0,1 радиана, тогда как система маневрирования ближнего действия должна иметь точность (или прецизионность), равную 0,1 миллиметра или выше, и/или рыскание и/или тангаж и/или крен не менее 0,001 радиана.
Описанные выше требования к точности (или прецизионности) могут относиться к монтированию кабельного устройства 11 на электрическом кабеле 12 и к демонтированию кабельного устройства 11 с электрического кабеля 12. В этом отношении требования к точности (или прецизионности) могут относиться к позиционированию и/или выравниванию кабельного устройства 11 относительно электрического кабеля 12 или позиционированию и/или выравниванию монтажной части 14 относительно кабельного устройства 11.
Как показано на фиг.1, электрический кабель 12 обычно изогнут или вогнут, и поэтому в месте монтирования и/или демонтирования электрический кабель 12 может быть наклонен и/или находиться под произвольным углом наклона к горизонту или вектору гравитации.
Кабельное устройство 11 должно быть монтировано на электрическом кабеле 12 так, чтобы прорезь 18 была выровнена вертикально. Однако, как показано на фиг.1, кабельное устройство 11 может быть монтировано на электрическом кабеле 12 под произвольным углом крена.
Следовательно, требования к точности (или точности) могут относиться к любому углу рыскания, углу тангажа и углу крена, будь то при монтировании и/или демонтировании, и/или для навигации и/или маневрирования.
В этом отношении, например, как показано на фиг.13, соединительное устройство 16 может включать в себя манипулирующее устройство 67, такое как шарнир, который позволяет монтажной части 14 манипулировать собой в реальном времени под произвольным углом по отношению к летательному аппарату. 10.
Следовательно, хотя летательный аппарат 10 может быть расположен горизонтально, монтажная часть 14 с использованием соединительного устройства 16 и манипулирующего устройства 67 может вращаться относительно летательного аппарата 10 и в соответствии с углом (углами) электрического кабеля 12 (для монтирования) или кабельного устройства 11 (для демонтирования). Манипулирующее устройство 67 может поворачивать монтажную часть 14 относительно летательного аппарата 10 в любом из углов рыскания, тангажа и крена или их комбинации.
Альтернативно или дополнительно или опционально, в частности, если монтажная часть 14 прикреплена к летательному аппарату 10, любой из углов рыскания, тангажа и крена монтажной части 14 может изменяться путем манипулирования углами рыскания, тангажа и крена летательного аппарата 10. Это может быть выполнено устройством 62 точного маневрирования, использующим один или более пропеллеров 66 и/или наклонных пропеллеров.
Как показано на фиг.13, соединительное устройство 16 может включать в себя два манипулирующих устройства 67, чтобы минимизировать влияние манипулирования любым из углов рыскания, тангажа и крена любого из летательного аппарата 10 и монтажной части 14 на центр тяжести летательного аппарата и аэродинамические свойства системы летательного аппарата 10 и монтажной части 14 и опционально кабельного устройства 11. Следовательно, соединительное устройство 16 с двумя манипулирующим устройствами 67 может дать возможность летательному аппарату 10 наклоняться в ответ на ветер, в то время как монтажная часть 14 может наклоняться в соответствии с ориентацией кабеля (монтирование) или ориентацией кабельного устройства 11 (демонтирование).
Понятно, что соединительное устройство 16 с одним или более манипулирующих устройств 67 может быть предусмотрено на верхней части летательного аппарата 10, чтобы нести кабельное устройство 11 над летательным аппаратом 10, как показано на фиг.11 и раскрыто в описании к ней.
Понятно, что вторая соединительная часть, такая как рычаги 19, также может обеспечивать такие функциональные возможности, как маневренность кабельного устройства 11 относительно монтажной части 14, например, путем изменения рыскания, тангажа и/или углов крена.
На фиг.14 показан упрощенный вид спереди летательного аппарата 10 с монтажной частью 14 с воронкой 68 согласно одному примерному варианту осуществления изобретения.
Как вариант, иллюстрации с фиг.14 можно рассматривать в контексте деталей предыдущих чертежей. Конечно, однако, иллюстрацию с фиг.14 можно рассматривать в контексте любого требуемого варианта осуществления. Кроме того, вышеупомянутые определения могут в равной степени применяться к приведенному ниже описанию.
Как показано на фиг.14, рычаги 19 монтажной части 14 имеют форму воронки 68. Воронка 68 имеет такую форму, чтобы вести летательный аппарат 10 с монтажной частью 14, несущей кабельное устройство 11, и/или прорезь 18 кабельного устройства 11, в направлении электрического кабеля 12. Понятно, что монтажная часть 14 может иметь две или более таких воронок 68, расположенных так, чтобы вести прорезь 18 к электрическому кабелю 12 и/или наоборот.
Понятно, что воронка 68 может быть частью кабельного устройства 11, или частью летательного аппарата 10, или частью монтажной части 14, кроме рычагов 19. Как показано на фиг.14, рычаги 19 и воронка 68 также служат как шасси летательного аппарата 10.
Как показано и описано выше, система летательного аппарата 10 и монтажной части 14 позволяет монтировать кабельное устройство на электрическом кабеле электрической сети, путем выполнения, например, следующих этапов:
крепление кабельного устройства к монтажному устройству, прикрепленному к летательному аппарату;
пилотирование летательного аппарата к электрическому кабелю с использованием части навигации дальнего действия;
с использованием части навигации дальнего действия, направлять часть навигации ближнего действия к электрическому кабелю;
пилотирование летательного аппарата с использованием части навигации ближнего действия к электрическому кабелю с одновременным выравниванием прорези кабельного устройства с электрическим кабелем;
монтирование кабельного устройства на электрическом кабеле так, чтобы электрический кабель был вставлен в прорезь кабельного устройства.
Точно так же система летательного аппарата 10 и монтажной части 14 позволяет демонтировать кабельное устройство с электрического кабеля электрической сети, путем выполнения, например, следующих этапов:
пилотирование летательного аппарата к электрическому кабелю с использованием части навигации дальнего действия;
идентификация кабельного устройства, монтированного на электрическом кабеле;
с использованием части навигации дальнего действия, направлять часть навигации ближнего действия к кабельному устройству;
пилотирование летательного аппарата с использованием части навигации ближнего действия, к электрическому кабелю, с выравниванием монтажной части летательного аппарата с кабельным устройством;
деблокировка кабельного устройства от электрического кабеля;
демонтирование кабельного устройства с электрического кабеля.
Следует понимать, что определенные признаки изобретения, которые для ясности описаны в контексте отдельных вариантов осуществления изобретения, также могут быть представлены в комбинации в одном варианте осуществления. Наоборот, различные признаки изобретения, которые для краткости описаны в контексте одного варианта осуществления, также могут быть представлены отдельно или в любой подходящей их комбинации.
Хотя описания выше были предоставлены в отношении конкретных вариантов осуществления изобретения, очевидно, что многие альтернативы, модификации и вариации будут очевидны для специалистов в данной области техники. Соответственно, подразумевается, что все такие альтернативы, модификации и вариации, которые соответствуют сущности и объему правовой охраны согласно прилагаемой формуле изобретения, включены в объем настоящего изобретения. Все публикации, патенты и заявки на патент, упоминаемые в настоящем описании, полностью включены в настоящее описание посредством ссылки так же, как если бы было специально и отдельно указано, что каждая отдельная публикация, патент или заявка на патент включены в настоящий документ посредством ссылки. Кроме того, цитирование или идентификация любой ссылки в настоящей заявке не должно толковаться как признание того, что такая ссылка представляет собой уровень техники настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУЛЬТИКОПТЕР С ВОЗДУШНЫМИ ВИНТАМИ РАЗЛИЧНОГО НАЗНАЧЕНИЯ | 2016 |
|
RU2718460C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПОЛОЖЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2256154C1 |
| СПОСОБ ОХРАННОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ ВИДЕОНАБЛЮДЕНИЯ | 2004 |
|
RU2260209C1 |
| Способ навигации летательных аппаратов по линейным поверхностным ориентирам | 2024 |
|
RU2838439C1 |
| МАНЕВРИРУЮЩАЯ СТУПЕНЬ РАКЕТЫ С КОМБИНИРОВАННОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СПОСОБ УПРАВЛЕНИЯ ЕЕ ДВИЖЕНИЕМ | 2010 |
|
RU2427507C1 |
| Способ коррекции углов ориентации БИНС | 2022 |
|
RU2796328C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ НАИБОЛЕЕ БЛАГОПРИЯТНЫХ ДЛЯ АТАКИ ВОЗДУШНЫХ ЦЕЛЕЙ В РЕЖИМЕ МНОГОЦЕЛЕВОГО СОПРОВОЖДЕНИЯ | 2020 |
|
RU2743479C1 |
| СПОСОБ КОНТРОЛЯ ДАТЧИКОВ СИСТЕМЫ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2664128C1 |
| Способ определения взаимного положения объектов навигации и система для осуществления указанного способа | 2019 |
|
RU2743048C1 |
| ЛЕГКИЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТОЛЕТНОГО ТИПА | 2020 |
|
RU2727333C1 |



Группа изобретений относится к монтажному устройству для монтирования кабельного устройства на электрическом кабеле электрической сети, летательному аппарату, содержащему такое устройство, способам монтирования и демонтирования кабельного устройства. Монтажное устройство содержит соединительную часть для его крепления к летательному аппарату, соединительную часть для крепления к монтажному устройству, навигационное оборудование. Для монтирования кабельного устройства осуществляют пилотирование летательного аппарата к электрическому кабелю с использованием сначала дальней, а потом ближней навигации в ручном и/или в автоматическом режиме, выравнивание и монтирование кабельного устройства с использованием прорези в кабельному устройстве, в которую вставляют кабель. Для демонтирования кабельного устройства осуществляют идентификацию устройства на электрическом кабеле, производят пилотирование летательного аппарата к электрическому кабелю с использованием сначала дальней, а затем ближней навигации в ручном и/или автоматическом режиме, выравнивают монтажную часть летательного аппарата, деблокируют устройство от электрического кабеля и производят его демонтирование. Обеспечивается монтаж и демонтаж кабельных устройств без нарушения электроснабжения. 4 н. и 19 з.п. ф-лы, 16 ил.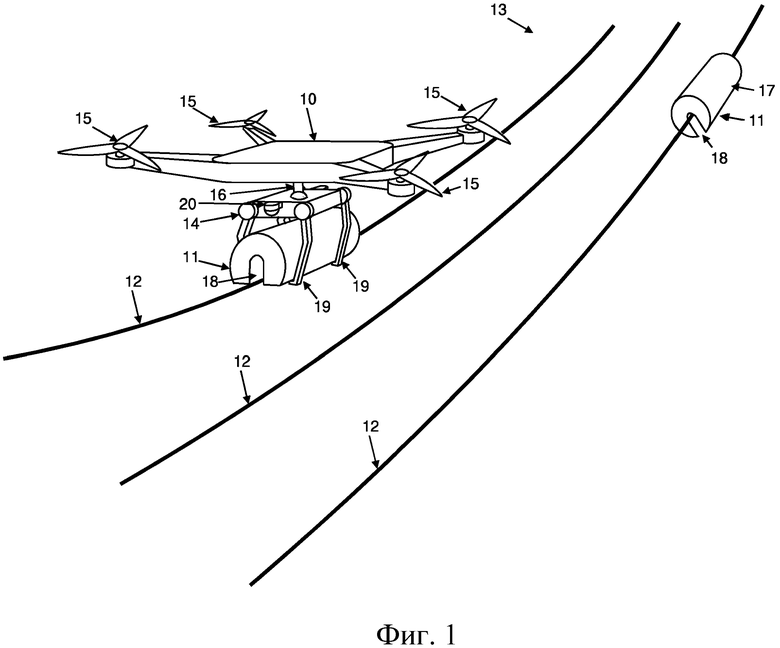
1. Монтажное устройство для по меньшей мере одного из монтирования кабельного устройства на электрическом кабеле электрической сети и демонтирования указанного кабельного устройства с указанного электрического кабеля, причем указанное монтажное устройство содержит:
первую соединительную часть, выполненную с возможностью крепления указанного монтажного устройства к летательному аппарату;
вторую соединительную часть, выполненную с возможностью крепления указанного кабельного устройства к указанному монтажному устройству;
и часть навигации, приспособленную выполнять по меньшей мере одно из следующего:
предоставление пользователю возможности осуществлять навигацию указанным летательным аппаратом так, чтобы направлять прорезь указанного кабельного устройства к указанному электрическому кабелю;
автоматическая навигация указанного летательного аппарата для направления указанной прорези указанного кабельного устройства к указанному электрическому кабелю;
предоставление пользователю возможности осуществлять навигацию указанного летательного аппарата к указанному кабельному устройству;
и автоматическая навигация указанного летательного аппарата к указанному кабельному устройству.
2. Монтажное устройство по п. 1, причем указанная часть навигации приспособлена выполнять по меньшей мере одно из следующего:
предоставление пользователю возможности управлять указанным летательным аппаратом так, чтобы выровнять указанную прорезь указанного кабельного устройства с указанным электрическим кабелем;
автоматическое управление указанным летательным аппаратом для выравнивания указанной прорези указанного кабельного устройства с указанным электрическим кабелем;
предоставление пользователю возможности управлять указанным летательным аппаратом, чтобы монтировать указанное кабельное устройство на указанном электрическом кабеле;
автоматическое управление указанным летательным аппаратом, чтобы монтировать указанное кабельное устройство на указанном электрическом кабеле;
предоставление пользователю возможности управлять указанным летательным аппаратом так, чтобы выровнять указанное монтажное устройство с указанным кабельным устройством, монтированным на указанном электрическом кабеле;
и автоматическое управление указанным летательным аппаратом, чтобы выровнять указанное монтажное устройство с указанным кабельным устройством, монтированным на указанном электрическом кабеле.
3. Монтажное устройство по п. 1, причем указанная часть навигации приспособлена выполнять по меньшей мере одно из следующего:
навигация с использованием оптических изображений по меньшей мере одного из указанного электрического кабеля и указанного кабельного устройства;
и навигация в соответствии с по меньшей мере одним из электрического поля и магнитного поля, излучаемых по меньшей мере одним из указанного электрического кабеля и указанного кабельного устройства.
4. Монтажное устройство по п. 1, дополнительно содержащее устройство локальной связи, приспособленное коммуникативно соединяться с указанной системой локального управления летательным аппаратом, чтобы выполнять указанное автоматическое управление указанным летательным аппаратом.
5. Монтажное устройство по п. 1, дополнительно содержащее устройство удаленной связи, коммуникативно соединенное с устройством удаленного управления, причем указанное устройство удаленной связи выполнено с возможностью коммуникации с указанным устройством удаленного управления для передачи по меньшей мере одного из:
навигационные данные от указанного монтажного устройства к указанному устройству удаленного управления;
и данные управления навигацией от указанного устройства удаленного управления к указанному монтажному устройству.
6. Монтажное устройство по п. 1, дополнительно содержащее устройство удаленного управления, приспособленное предоставлять пользователю возможность выполнять по меньшей мере одно из следующего:
предоставление пользователю возможности управлять указанным летательным аппаратом, чтобы выровнять указанную прорезь указанного кабельного устройства с указанным электрическим кабелем;
предоставление пользователю возможности управлять указанным летательным аппаратом так, чтобы выровнять указанное монтажное устройство с указанным кабельным устройством, монтированном на указанном электрическом кабеле;
предоставление пользователю возможности управлять указанным летательным аппаратом, чтобы монтировать указанное кабельное устройство на указанном электрическом кабеле;
предоставление пользователю возможности управлять указанным летательным аппаратом, чтобы демонтировать указанное кабельное устройство от указанного электрического кабеля;
предоставление пользователю возможности переключать указанное монтажное устройство в автоматический режим с использованием устройства связи, коммуникативно соединенного с указанной системой локального управления летательным аппаратом, для выполнения указанного автоматического управления указанным летательным аппаратом.
7. Монтажное устройство по п. 1, причем указанная вторая соединительная часть, выполненная с возможностью крепления указанного кабельного устройства к указанному монтажному устройству, содержит по меньшей мере одно из следующего: механическое соединение и электромеханическое соединение.
8. Монтажное устройство по п. 7, дополнительно содержащее часть активации блокировки, приспособленную для: присоединения к блокировочной части указанного кабельного устройства и выполнения по меньшей мере одного из следующего:
активация блокировки указанного кабельного устройства на указанном электрическом кабеле;
активация деблокировки указанного кабельного устройства от указанного электрического кабеля;
идентификация индикации блокировки указанного кабельного устройства на указанном электрическим кабеле;
и идентификация индикации деблокировки указанного кабельного устройства на указанном электрическом кабеле.
9. Монтажное устройство по п. 1, дополнительно содержащее манипулирующее устройство, выполненное с возможностью выполнения, по меньшей мере, одного из:
маневрирование указанной монтажной части относительно указанного летательного аппарата по меньшей мере в одном из углов рыскания, тангажа и крена;
маневрирование указанным кабельным устройством относительно указанной монтажной части по меньшей мере в одном из углов рыскания, тангажа и крена;
маневрирование указанным кабельным устройством относительно указанного электрического кабеля по меньшей мере в одном из углов рыскания, тангажа и крена;
маневрирование указанной монтажной части относительно указанного кабельного устройства, монтированного на указанном электрическом кабеле, по меньшей мере в одном из углов рыскания, тангажа и крена;
маневрирование указанной монтажной части без влияния по меньшей мере на один из углов рыскания, тангажа и крена указанного летательного аппарата;
и маневрирование указанным кабельным устройством без влияния по меньшей мере на один из углов рыскания, тангажа и крена указанного летательного аппарата.
10. Монтажное устройство по п. 9, причем указанное монтажное устройство приспособлено маневрировать по меньшей мере в одном из углов рыскания, тангажа и крена в соответствии с данными, полученными от указанной части навигации.
11. Летательный аппарат для монтирования кабельного устройства на электрическом кабеле электрической сети, при этом указанный летательный аппарат содержит:
монтажную часть;
часть присоединения датчика, выполненную с возможностью прикрепления указанного кабельного устройства к указанной монтажной части;
часть навигации прорези, приспособленную для по меньшей мере одного из следующего:
предоставление пользователю возможности осуществлять навигацию указанного летательного аппарата так, чтобы направить прорезь указанного кабельного устройства к указанному электрическому кабелю;
автоматическая навигация указанного летательного аппарата, чтобы направить указанную прорезь указанного кабельного устройства к указанному электрическому кабелю;
предоставление пользователю возможности осуществлять навигацию указанного летательного аппарата к указанному кабельному устройству;
и автоматическая навигация указанного летательного аппарата к указанному кабельному устройству.
12. Летательный аппарат по п. 11, дополнительно содержащий: часть присоединения коптера, выполненную с возможностью крепления указанного летательного аппарата к указанной монтажной части, причем указанная часть присоединения коптера приспособлена к маневрированию указанным монтажным устройством относительно указанного летательного аппарата по меньшей мере в одном из углов рысканья, тангажа и крена в соответствии с данными, полученными от указанной части навигации прорези.
13. Летательный аппарат по п. 11, дополнительно содержащий: часть навигации дальнего действия, приспособленную выполнять по меньшей мере одно из следующего:
предоставление пользователю возможности осуществлять навигацию указанного летательного аппарата, чтобы направить указанную часть навигации прорези к указанному электрическому кабелю;
автоматическая навигация указанного летательного аппарата, чтобы направить указанную часть навигации прорези к указанному электрическому кабелю.
14. Способ монтирования кабельного устройства на электрическом кабеле электрической сети, при этом указанный способ включает:
крепление указанного кабельного устройства к монтажному устройству, прикрепленному к летательному аппарату;
пилотирование указанного летательного аппарата с использованием части навигации дальнего действия к указанному электрическому кабелю;
направление части навигации ближнего действия к указанному электрическому кабелю;
пилотирование указанного летательного аппарата к указанному электрическому кабелю с использованием указанной части навигации ближнего действия;
выравнивание прорези указанного кабельного устройства с указанным электрическим кабелем;
и монтирование указанного кабельного устройства на указанном электрическом кабеле, при этом указанный электрический кабель вставляют в указанную прорезь указанного кабельного устройства.
15. Способ демонтирования кабельного устройства с электрического кабеля электрической сети, при этом указанный способ включает:
пилотирование летательного аппарата с использованием части навигации дальнего действия к указанному электрическому кабелю;
идентификацию указанного кабельного устройства, монтированного на указанном электрическом кабеле;
направление части навигации ближнего действия к указанному кабельному устройству;
пилотирование указанного летательного аппарата с использованием указанной части навигации ближнего действия к указанному электрическому кабелю;
выравнивание монтажной части указанного летательного аппарата с кабельным устройством;
деблокировку кабельного устройства от электрического кабеля;
и демонтирование указанного кабельного устройства с электрического кабеля.
16. Способ по п. 14 или 15, в котором указанный этап пилотирования указанного летательного аппарата с использованием указанной части навигации дальнего действия включает по меньшей мере одно из следующего:
предоставление пользователю возможности управлять указанным летательным аппаратом так, чтобы выровнять указанную прорезь указанного кабельного устройства с указанным электрическим кабелем;
автоматическое управление указанным летательным аппаратом, чтобы выровнять указанную прорезь указанного кабельного устройства с указанным электрическим кабелем;
предоставление пользователю возможности управлять указанным летательным аппаратом, чтобы монтировать указанное кабельное устройство на указанном электрическом кабеле;
автоматическое управление указанным летательным аппаратом для монтирования указанного кабельного устройства на указанном электрическом кабеле;
предоставление пользователю возможности управлять указанным летательным аппаратом, чтобы выровнять указанное монтажное устройство с указанным кабельным устройством, монтированном на указанном электрическом кабеле;
и автоматическое управление указанным летательным аппаратом для выравнивания указанного монтажного устройства с указанным кабельным устройством, установленным на указанном электрическом кабеле.
17. Способ по п. 14 или 15, в котором указанный этап пилотирования указанного летательного аппарата с использованием указанной части навигации дальнего действия включает по меньшей мере одно из следующего:
навигация с использованием оптических изображений по меньшей мере одного из указанного электрического кабеля и указанного кабельного устройства;
и навигация в соответствии с по меньшей мере одним из электрического поля и магнитного поля, излучаемых по меньшей мере одним из указанного электрического кабеля и указанного кабельного устройства.
18. Способ по п. 14 или 15, в котором указанный этап пилотирования указанного летательного аппарата с использованием указанной части навигации дальнего действия дополнительно включает:
использование устройства локальной связи в монтажной части, прикрепленной к указанному летательному аппарату,
и коммуникативное соединение с указанной системой локального управления летательным аппаратом для автоматического управления указанным летательным аппаратом.
19. Способ по п. 14 или 15, в котором по меньшей мере один из указанных этапов пилотирования указанного летательного аппарата с использованием указанной части навигации дальнего действия и пилотирования указанного летательного аппарата с использованием указанной части навигации ближнего действия дополнительно включает:
использование устройства удаленной связи, коммуникативно соединенного с устройством удаленного управления, причем указанное устройство удаленной связи осуществляет коммуникацию с указанным устройством удаленного управления для передачи по меньшей мере одного из: навигационные данные от указанного монтажного устройства к указанному устройству удаленного управления и данные управления навигацией от указанного устройства удаленного управления к указанному монтажному устройству.
20. Способ по п. 14 или 15, в котором по меньшей мере один из указанных этапов пилотирования указанного летательного аппарата с использованием указанной части навигации дальнего действия и пилотирования указанного летательного аппарата с использованием указанной части навигации ближнего действия дополнительно включает:
предоставление пользователю возможности управлять, с использованием устройства удаленного управления, указанным летательным аппаратом так, чтобы выровнять указанную прорезь указанного кабельного устройства с указанным электрическим кабелем;
предоставление пользователю возможности управлять, с использованием устройства удаленного управления, указанным летательным аппаратом так, чтобы выровнять указанное монтажное устройство с указанным кабельным устройством, монтированным на указанном электрическом кабеле;
предоставление пользователю возможности управлять, с использованием устройства удаленного управления, указанным летательным аппаратом так, чтобы монтировать указанное кабельное устройство на указанном электрическом кабеле;
предоставление пользователю возможности управлять, с использованием устройства удаленного управления, указанным летательным аппаратом так, чтобы демонтировать указанное кабельное устройство с указанного электрического кабеля;
предоставление пользователю возможности переключать, с использованием устройства удаленного управления, указанное монтажное устройство в автоматический режим с использованием устройства связи, коммуникативно соединенного с указанной системой локального управления летательным аппаратом, для выполнения указанного автоматического управления указанным летательным аппаратом.
21. Способ по п. 14 или 15, дополнительно включающий обеспечение наличия манипулирующего устройства, выполненного с возможностью выполнения маневрирования по меньшей мере одного из:
указанной монтажной части относительно указанного летательного аппарата по меньшей мере в одном из углов рыскания, тангажа и крена;
указанным кабельным устройством относительно указанной монтажной части по меньшей мере в одном из углов рыскания, тангажа и крена;
указанным кабельным устройством относительно указанного электрического кабеля по меньшей мере под одним из углов рыскания, тангажа и крена;
указанной монтажной части относительно указанного кабельного устройства, монтированного на указанном электрическом кабеле, по меньшей мере в одном из углов рыскания, тангажа и крена;
указанной монтажной части без влияния по меньшей мере на один из углов рыскания, тангажа и крена указанного летательного аппарата;
и указанного кабельного устройства без влияния по меньшей мере на один из углов рыскания, тангажа и крена указанного летательного аппарата.
22. Способ по п. 14 или 15, дополнительно включающий:
обеспечение наличия монтажной части, прикрепленной к указанному летательному аппарату, причем указанная монтажная часть содержит часть активации блокировки;
присоединение части активации блокировки к блокировочной части указанного кабельного устройства;
и по меньшей мере одно из:
блокировка указанного кабельного устройства на указанном электрическом кабеле;
деблокировка указанного кабельного устройства от электрического кабеля;
идентификация индикации блокировки указанного кабельного устройства на указанном электрическом кабеле;
и идентификация индикации деблокировки указанного кабельного устройства от указанного электрического кабеля.
23. Способ по п. 14 или 15, дополнительно включающий:
обеспечение наличия монтажной части, содержащей соединительную часть, выполненную с возможностью крепления указанного монтажного устройства к указанному летательному аппарату, при этом указанная монтажная часть указанной соединительной части содержит по меньшей мере одно из механического соединения и электромеханического соединения;
и использование указанной соединительной части для маневрирования указанной монтажной частью относительно упомянутого указанного аппарата по меньшей мере в одном из углов рыскания, тангажа и крена.
| СПОСОБ МОНТАЖА МАРКЕРОВ, ЗАКРЕПЛЯЕМЫХ НА ПРОВОДАХ И МОЛНИЕЗАЩИТНЫХ ТРОСАХ ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ, С ПОМОЩЬЮ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ВАРИАНТЫ) | 2016 |
|
RU2644420C1 |
| US 5467730 A1, 21.11.1995 | |||
| US 20170139424 A1, 18.05.2017 | |||
| US 7318564 B1, 15.01.2008. | |||

