Изобретение относится к авиационной технике, а именно к малоразмерным беспилотным летательным аппаратам вертолетного типа, предназначенным для полетов в сильнопересеченном пространстве: внутри аварийных зданий, в заводских цехах, в лесных массивах и т.д. Аппарат может быть использован для целей мониторинга, разведки, перевозки небольших грузов, монтажных или сервисных операций и др.
Известны различные беспилотные летательные аппараты (БПЛА) вертолетного типа, способные совершать вертикальные взлет и посадку и содержащие: двигательную установку (на базе тепловых или электрических двигателей); энергетический источник (топливный бак или аккумулятор); один или два воздушных винта; фюзеляж, совмещающий функции несущей конструкции и защиты винтов; механизм управления движением, обеспечивающий, как минимум, маневры аппарата в горизонтальной плоскости с изменением углов рысканья, крена и тангажа.
Механизм управления движением может быть выполнен по-разному. Например, в БПЛА с тороидальным фюзеляжем и соосно расположенными внутри него противоположно вращающимися винтами [US Pat. №5152478. МПК В64С 29/00. Publ. Oct. 6, 1992] управление движением осуществляется за счет циклического изменения шага винтов. Однако сам механизм циклического изменения шага винта - довольно сложное и дорогостоящее устройство.
Известны БПЛА с вертикальным взлетом-посадкой с другими, более простыми способами управления движением. Например, это может быть сделано за счет изменения центра масс аппарата. Так, в БПЛА [Патент РФ на полезную модель №82674. МПК В64С 29/00. Опубл. 10.05.2009] с двумя соосными винтами и сферическим корпусом управление движением осуществляется за счет смещения центра масс аппарата с помощью механического устройства в нижней части корпуса. Такое устройство имеет большие массу и габариты и не всегда обладает достаточным быстродействием.
В другом подобном БПЛА [Патент РФ №2504500. МПК В64С 29/00. Опубл. 20.01.2014] смещение центра масс выполняется за счет организованного перетока жидкости внутри фюзеляжа. Недостатки у этого варианта такие же, как у предыдущего.
Часто механизм управления движением БПЛА с вертикальным взлетом-посадкой реализуют на основе отклоняемых с помощью сервоприводов плоских или криволинейных поверхностей (лопаток), расположенных под винтами. Такой подход обеспечивает в большинстве случаев достаточное быстродействие. Возможно использование для управления 2, 4 или 3 сервоприводов.
В БПЛА [US Pat. №9725170. МПК В64С 17/00. Publ. Aug. 8, 2017] для приведения в движение управляющих лопаток использовано 2 сервопривода, оси вращения которых лежат в горизонтальной плоскости и перпендикулярны друг другу. К оси вращения каждого сервопривода жестко прикреплено по 2 лопатки, которые совершают угловые перемещения как единое целое. Одна пара управляющих лопаток реализует изменение угла крена, другая -угла тангажа БПЛА. Управление по углу рысканья аппарата осуществляется за счет изменения соотношения частот вращения двух разнонаправленных соосных винтов аппарата. Недостатками данной конструкции являются: нерациональность компоновки (размещение сервоприводов на внешней части фюзеляжа приводит к смещению центра масс, а размещение их в центральной части усложняет и утяжеляет механическую передачу к лопаткам), большая нагрузка на сервоприводы, невозможность управления углом рысканья за счет управляющих лопаток, что заставляет использовать для этого более энергозатратное управление за счет вращения винтов.
В БПЛА [US Pat. №6691949. МПК В64С 27/22. Publ. Feb. 17, 2004] для приведения в движение управляющих лопаток использовано 4 размещенных в центре независимых друг от друга сервопривода, причем к оси каждого из них прикреплена своя лопатка. Углы между соседними осями составляют по 90°. При таком решении может быть обеспечено управление за счет отклонения лопаток не только по углам крена и тангажа, но и по углу рысканья (без изменения вращения винтов). Недостатками данного решения являются: избыточное количество сервоприводов (как показано ниже, достаточно 3-х), и как следствие, неиспользованные возможности уменьшения массы; необходимость применения для эффективного управления движением аппарата лопаток большой площади или отклонения их на значительные углы, что приводит к слишком интенсивной работе сервоприводов и их быстрому износу.
Эффективность управления за счет отклоняемых поверхностей можно повысить, если увеличить количество синхронно отклоняемых лопаток. В этом случае суммарная площадь лопаток, одновременно отклоняемых одним сервоприводом, увеличивается, и угол отклонения может быть уменьшен. Такое решение применяется, например, в [US Pat. №5295643. МПК В64С 27/22. Publ. Mar. 22, 1994]. Однако в данной конструкции сложность и громоздкость механизмов передачи движения от сервоприводов на лопатки приводит к увеличению массы аппарата.
Наличие трех управляющих лопаток в нижней части летательного аппарата в зоне действия воздушного потока, создаваемого воздушными винтами, вполне достаточно для стабилизации аппарата и изменения углов крена, тангажа и рысканья без задействования для этих целей вращения самих несущих винтов. Такое решение применяется, например, в летательном аппарате [Евразийский патент №021156. МПК В64С 27/10. Опубл. 30.04.2015]. Оно упрощает управление и в итоге облегчает конструкцию по сравнению с решениями, в которых используется циклическое изменение шага винтов. Однако данная конкретная конструкция относится к пилотируемым аппаратам, для управления лопатками используется ручной привод. Кроме того, конструкция не является защищенной и не может эксплуатироваться в замкнутых и сильнопересеченных пространствах.
Другим известным решением, в котором используется только 3 управляющих элемента, является БПЛА [Патент РФ №2455198. МПК В64С 27/00. Опубл. 10.07.2012]. Этот аппарат имеет цилиндрический фюзеляж, внутри которого размещены два соосных противоположно вращающихся несущих винта с соответствующими электродвигателями. Управление по крену и тангажу осуществляется с помощью трех импеллеров, равномерно распределенных по внешней поверхности фюзеляжа. Выходы импеллеров направлены вертикально вниз. Вертикальные воздушные потоки импеллеров обеспечивают эффективную стабилизацию аппарата и изменения углов крена и тангажа, вызывающие поступательные перемещения аппарата в горизонтальной плоскости. Однако вращательное движение аппарата вокруг своей оси импеллеры обеспечить не могут, поэтому для этого приходится использовать изменение частот вращения несущих винтов, что не вполне энергоэффективно. Кроме того, сами импеллеры представляют собой вентиляторы с собственными электродвигателями, которые заключены в кольцевые каналы, что в совокупности имеет значительную массу.
Наиболее близким по технической сущности к предлагаемому изобретению является малоразмерный беспилотный летательный аппарат вертолетного типа [US Pat. №7510142. МПК В64С 27/08. Publ. Mar. 31, 2009. Fig.6], содержащий цилиндрический корпус, в центральной части которого по оси его симметрии размещена силовая установка с двумя соосными винтами противоположного вращения, закрепленными на валах соответствующих электродвигателей, четыре управляющих лопатки, находящихся внутри корпуса в зоне действия воздушного потока от винтов и закрепленных на валах соответствующих сервоприводов, которые равномерно распределены в нижней части корпуса по его наружной поверхности. Силовая установка прикреплена к корпусу посредством нескольких плоских вертикальных держателей. Электронные блоки распределены в аппарате по наружной поверхности корпуса и защищены снаружи легким цилиндрическим кожухом. Аппарат получает электроэнергию с наземного источника по разматываемому кабелю в форме переменного высокого напряжения, которое на борту преобразуется с помощью трансформатора и выпрямителя в постоянное напряжение. По тому же кабелю передаются команды и телеметрическая информация. Благодаря имеющемуся в составе электронных блоков микроконтроллеру и набору датчиков (GPS, гироскоп, акселерометр, барометр и др.) осуществляется управление аппаратом: микроконтроллер выдает управляющие сигналы на сервоприводы или электродвигатели, необходимые для стабилизации его положения или выполнения команд по перемещению. При этом четыре независимых сервопривода с отклоняемыми лопатками позволяют осуществить управление по углам крена, тангажа и рысканья, а изменение частот вращения винтов используется для изменения силы тяги при спуске и подъеме.
Рассмотренный аппарат имеет следующие недостатки, связанные с недоиспользованием резервов снижения массы и потребляемой энергии:
- избыточное количество сервоприводов и связанных с ними лопаток. Наличие трех, а не четырех, управляющих лопаток и соответствующих сервоприводов вполне достаточно для стабилизации аппарата и изменения углов крена, тангажа и рысканья;
- неэффективность применяемых плоских одиночных лопаток. Для качественного управления движением аппарата такими лопатками необходимо иметь лопатки большой площади или отклонять их на значительные углы, что приводит к слишком интенсивной и энергозатратной работе сервоприводов и их быстрому износу.
Задачей данного изобретения является создание облегченного энергоэффективного беспилотного летательного аппарата вертолетного типа для полетов в сильнопересеченном пространстве.
Технический результат заключается в уменьшении массы аппарата и снижении его энергопотребления, что обеспечивает при неизменной энергоемкости бортового источника питания увеличение времени полета и (или) массы полезной нагрузки.
Задача решается тем, что в известном беспилотном летательном аппарате вертолетного типа, содержащем цилиндрический корпус, в центральной части которого по оси его симметрии размещена силовая установка с двумя соосными винтами противоположного вращения, закрепленными на валах соответствующих электродвигателей, несколько управляющих лопаток, находящихся внутри корпуса в зоне действия воздушного потока от винтов и закрепленных на валах соответствующих сервоприводов, которые равномерно распределены в нижней части корпуса по его наружной поверхности, внесены следующие изменения:
количество лопаток и соответствующих сервоприводов равно трем; каждая лопатка является фигурной и многосоставной и состоит из двух или более вставленных друг в друга замкнутых жестких полос, криволинейные поверхности которых соответствуют боковым поверхностям эллиптических цилиндров, образующие прямые которых при нейтральном положении сервоприводов имеют вертикальное направление, причем ось вращения каждого сервопривода лежит в средней горизонтальной секущей плоскости лопатки и совпадает с осями ее эллипсов-сечений, длины этих осей для всех эллипсов-сечений лопатки равны, а длины осей, перпендикулярных оси вращения сервопривода, распределяются согласно формуле:
где  - длина i-ой оси, i=1…n, n - количество вставленных друг в друга цилиндров, а - длина оси внешнего цилиндра,
- длина i-ой оси, i=1…n, n - количество вставленных друг в друга цилиндров, а - длина оси внешнего цилиндра,
высота полос цилиндрических поверхностей составляет (0,1…0,3)R, где R - радиус цилиндрического корпуса аппарата; габаритные размеры лопаток и высота их расположения относительно нижней кромки корпуса выбраны таким образом, чтобы при максимальном угловом отклонении лопаток они не касались друг друга, внутренней поверхности корпуса, нижнего винта и поверхности земли;
силовая установка закреплена в корпусе аппарата с помощью трех пустотелых балок, угол между каждыми соседними балками равен 120°; цилиндрический контейнер оборудования с диаметром в несколько раз меньше диаметра корпуса аппарата, заключающий в себе источник питания, электронные блоки и полезную нагрузку, расположен соосно с корпусом аппарата и закреплен с помощью таких же трех пустотелых балок над его верхней кромкой.
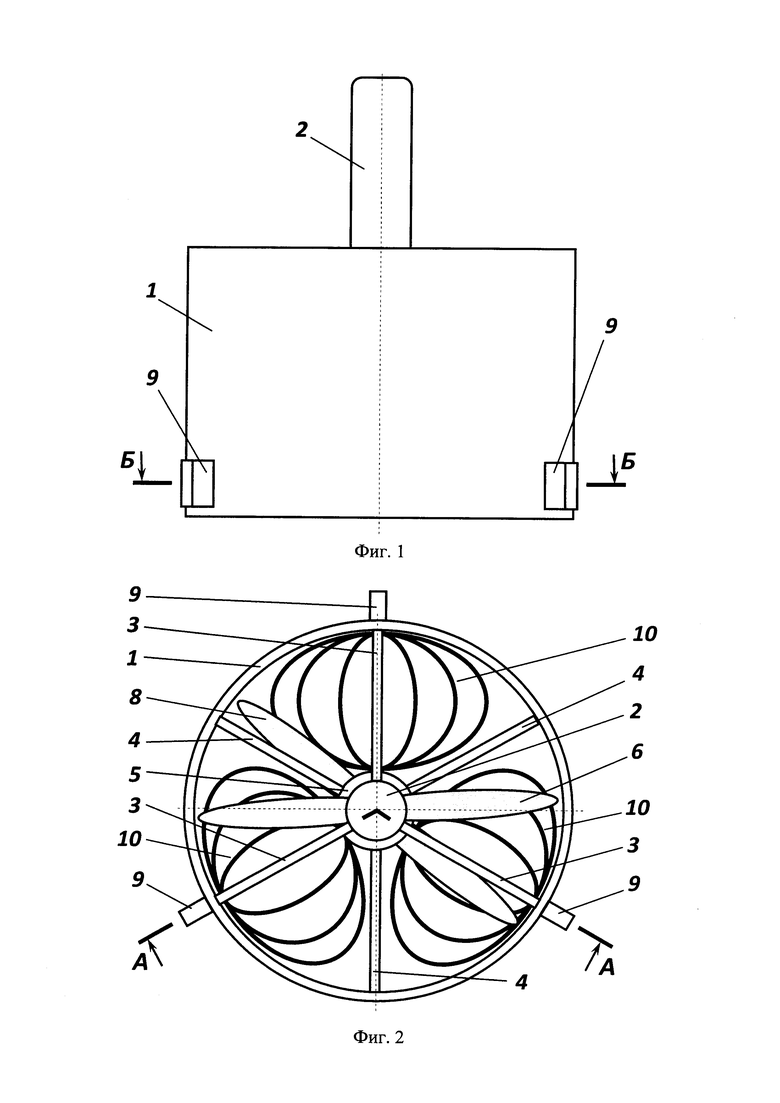
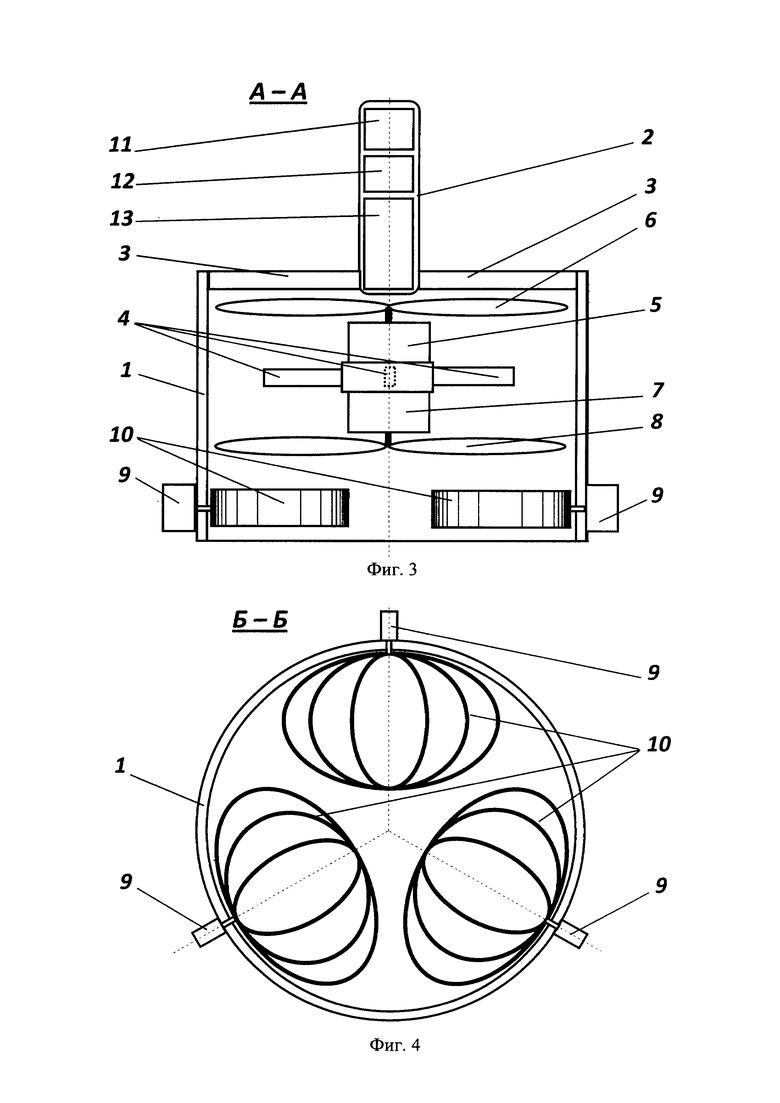
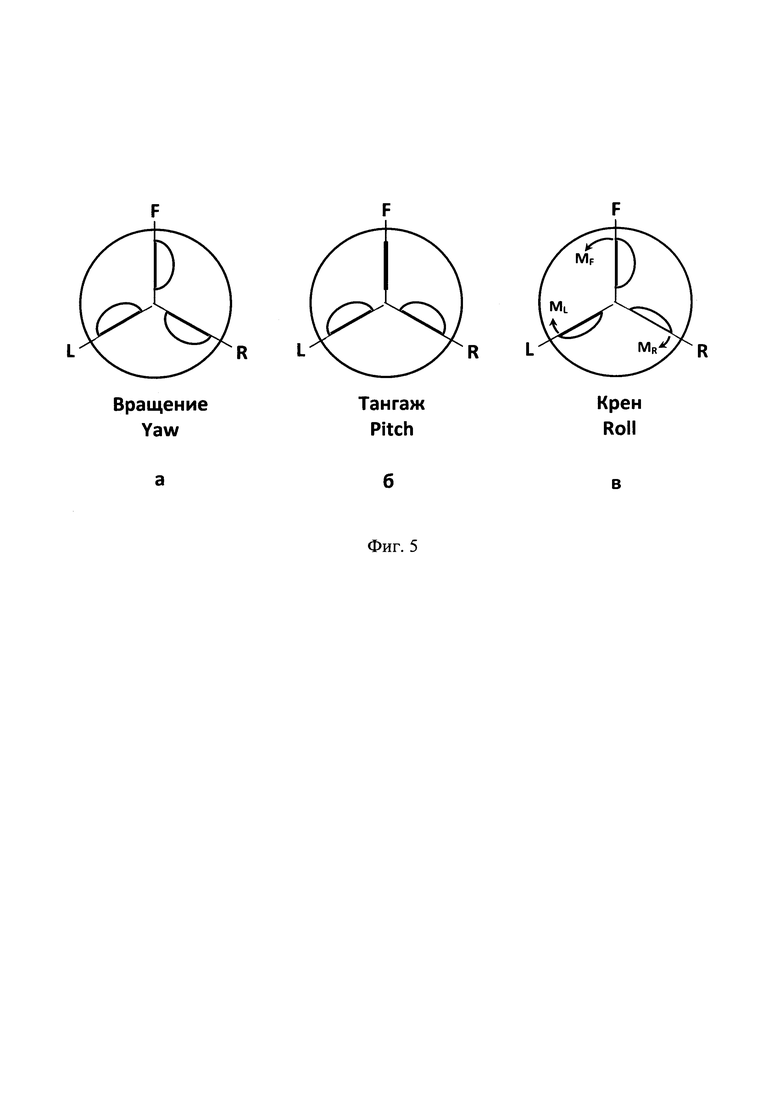
Сущность изобретения поясняется следующими иллюстрациями. На фиг. 1 показан вид аппарата спереди, а на фиг. 2 вид сверху. На фиг. 3 показан продольный ломаный разрез (А-А по фиг. 2), а на фиг. 4 - поперечный разрез в нижней части аппарата на уровне осей вращения лопаток (Б-Б по фиг. 1). На фиг. 5 показана схема распределения отклонений лопаток для выполнения аппаратом типовых маневров.
На иллюстрациях цифрами обозначены: 1 - цилиндрический корпус аппарата; 2 - контейнер оборудования; 3 - верхние пустотелые балки; 4 - нижние пустотелые балки; 5 - верхний двигатель; 6 - верхний винт; 7 - нижний двигатель; 8 - нижний винт; 9 - сервоприводы; 10 - фигурные многосоставные лопатки; 11 - полезная нагрузка; 12 - блок электроники; 13 - источник питания.
Основу конструкции аппарата образует цилиндрический корпус 1, внутри которого по оси его симметрии расположена силовая установка, состоящая из верхнего двигателя 5, на валу которого закреплен верхний воздушный винт 6, и нижнего двигателя 7, на валу которого закреплен нижний воздушный винт 8. Вал верхнего двигателя 5 направлен вверх, а вал нижнего двигателя 7 - вниз. Направления вращения винтов 6 и 8 взаимно обратны, но направления воздушных потоков от обоих винтов направлены вниз.
Двигатели 5 и 7 закреплены в центре корпуса 1 посредством трех пустотелых балок 4, лежащих в горизонтальной плоскости, причем угол между каждыми соседними балками равен 120°. Балки 4 совмещают функции держателей силовой установки и распорок между силовой установкой и цилиндрическим корпусом.
Такие же три пустотелые балки 3 установены таким же образом у верхней кромки корпуса 1. Они являются держателями цилиндрического контейнера оборудования 2 и распорками между этим контейнером и корпусом 1.
Кроме того, пространство внутри пустотелых балок 3, 4 используется для прокладки электрических проводов (на рисунках не показаны), связывающих двигатели 5, 7, сервоприводы 9 с контейнером оборудования 2, в котором находятся полезная нагрузка 11 (например, видеокамера), блок электроники 12 (может включать в себя различные электронные узлы: командный радиоприемник, полетный контроллер, навигационные датчики, драйверы двигателей и др.) и источник питания 13 (например, аккумуляторная батарея).
Три сервопривода 9 равномерно распределены в нижней части корпуса 1 по его наружной поверхности. Валы сервоприводов направлены к центру корпуса 1, их оси лежат в одной горизонтальной плоскости и углы между соседними осями равны 120°. На валы сервоприводов жестко насажены фигурные многосоставные лопатки 10. Расположение сервоприводов 9 и размер лопаток 10 выбраны так, что при всех возможных углах поворота валов сервоприводов 9 лопатки 10 не задевают друг друга, внутреннюю поверхность корпуса 1, нижний винт 8 и поверхность земли.
Конструкция фигурных многосоставных лопаток 10, выполненных из легкого тонкого материала, отличается повышенной площадью взаимодействия с потоком набегающего воздуха при их отклонении, что делает такие лопатки гораздо более эффективными по сравнению с одиночными плоскими лопатками. Это позволяет ограничить углы поворота валов сервоприводов малыми значениями (порядка ±5° против ±40° для одиночной плоской лопатки такой же высоты), что делает работу сервоприводов более экономичной и надежной). Кроме того, повышенная полная эквивалентная площадь лопатки позволяет значительно сократить ее высоту, и, как следствие, сократить высоту и массу аппарата в целом.
Аппарат работает следующим образом.
По радиокомандам с земли или для стабилизации своего текущего положения блоком электроники 12 вырабатываются сигналы для управления исполнительными устройствами - двигателями 5, 7 и сервоприводами 9. При этом аппарат может выполнять подъем/посадку, зависание в точке или маневры (изменение угла рысканья для поворота вокруг своей оси, изменение угла тангажа для движения вперед/назад, изменение угла крена для движения влево/вправо).
Значения частоты вращения для винтов 6, 8 поддерживаются одинаковыми для взаимокомпенсации закручивающего момента. Для подъема аппарата блок электроники 12 выдает управляющие сигналы на синхронное увеличение частот вращения двигателей 5 и 7, для спуска - на уменьшение частот их вращения.
Для выполнения типовых движений - вращения вокруг своей оси, наклона по тангажу и крену блок электроники 12 выдает управляющие сигналы на повороты валов соответствующих сервоприводов 9. На фиг. 5 на упрощенных видах аппарата сверху схематично показаны соответствующие отклонения лопаток 10 при условии, что за переднее направление аппарата принято направление, совпадающее с осью одной из лопаток (F). Двум другим лопаткам присвоены условные обозначения L (левая) и R (правая). Тогда для выполнения вращения все три лопатки должны отклониться в одном направлении на одинаковые углы (фиг. 5, а). Для изменения угла тангажа передняя лопатка (F) должна оставаться в нейтральном (вертикальном) положении, а лопатки L и R - обе отклониться на один и тот же угол в сторону направления F или в обратную сторону в зависимости от желаемого знака угла тангажа (фиг. 5, б). Для изменения угла крена передняя лопатка (F) отклоняется в определенном направлении (например, по часовой стрелке) на некоторый угол α, а лопатки L и R - обе отклоняются на один и тот же угол 0,5α в противоположную сторону (против часовой стрелки), при этом суммарный закручивающий момент MF+ML+MR равен нулю, имеет место только отклонение аппарата по крену (фиг. 5, в).
Таким образом, трех лопаток вполне достаточно для стабилизации аппарата и управления им.
Элементы конструкции предлагаемого летательного аппарата могут быть реализованы на основе легких композитных материалов. Например, корпус 1, контейнер оборудования 2, пустотелые балки 3 и 4 могут быть изготовлены из углепластика. Для снижения массы аппарата в цилиндрическом корпусе 1 из углепластика может быть выполнен только каркас, который обтянут еще более легким пористым материалом, например, элапором. Фигурные многосоставные лопатки 10 могут быть также изготовлены из тонкого листового углепластика либо отлиты из пластика или изготовлены методом 3D-печати. Количество вставленных друг в друга элементов (замкнутых полос) с сечениями в форме эллипсов для каждой лопатки может быть выбрано от 1 до 5 и более. Оптимальное количество - 2…3. При количестве таких элементов 2 и более жесткость всей лопатки повышается. Большое количество элементов выбирать нецелесообразно по причине увеличения массы лопатки. При большом количестве элементов в лопатке ее высота может быть уменьшена, однако при очень малой высоте начинают проявляться кавитационные явления и у лопатки снижается эффективность перенаправления воздушного потока. Оптимальная высота полос цилиндрических поверхностей составляет (0,1…0,3)R, где R - радиус цилиндрического корпуса аппарата.
Другие комплектующие являются стандартными: двигатели 5,7 - бесколлекторные электродвигатели постоянного тока с питанием от специальных драйверов (ESC); сервоприводы 9 - управляемые ШИМ-сигналом, например, SG90; воздушные винты 6,8 - пластиковые или углепластиковые двух- или многолопастные; источник питания - батарея литий-ионных аккумуляторов. Все узлы, входящие в блок электроники 12, также являются стандартными и широко распространенными.
В рассмотренном аппарате устранены недостатки прототипа и других аналогов, связанные с недоиспользованием резервов снижения массы и потребляемой энергии, а именно:
- устранено избыточное количество сервоприводов и связанных с ними лопаток. Наличие трех, а не четырех, управляющих лопаток и соответствующих сервоприводов вполне достаточно для стабилизации аппарата и изменения углов крена, тангажа и рысканья. Это позволяет упростить конструкцию, уменьшить массу аппарата и энергопотребление;
- неэффективные плоские одиночные лопатки заменены фигурными многосвязными лопатками, имеющими большую суммарную площадь взаимодействия с воздушным потоком. Это позволяет реализовать качественное управление с очень небольшим диапазоном изменения углов отклонения лопаток, а значит, с небольшим диапазоном изменения углов вращения валов сервоприводов, что снижает их энергопотребление, увеличивает надежность и продлевает ресурс;
- большая площадь взаимодействия фигурных многосвязных лопаток с воздушным потоком позволяет уменьшить их высоту относительно высоты плоской одиночной лопатки. Это достоинство в совокупности с небольшими углами отклонения лопаток позволяет уменьшить общую высоту аппарата, что дает дополнительный выигрыш в массе и энергопотреблении.
Снижение массы и энергопотребления аппарата в конечном счете повышает эффективность его использования, т.е. при сохранении энергоемкости бортового источника питания могут быть повышены время полета и (или) масса полезной нагрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ МАЛОЗАМЕТНОЙ МОДУЛЬНОЙ БЕСПИЛОТНОЙ ЛЕТАТЕЛЬНОЙ СИСТЕМЫ | 2023 |
|
RU2829915C1 |
| Малый беспилотный летательный аппарат (варианты) | 2023 |
|
RU2824014C1 |
| БПЛА и способ управления БПЛА | 2024 |
|
RU2831546C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ (ВАРИАНТЫ) | 2016 |
|
RU2648491C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2023 |
|
RU2799426C1 |
| Способ управления по крену или тангажу при транспортировке легким и сверхлегким летательным аппаратом расходуемой по весу нагрузки (варианты) и легкий или сверхлегкий летательный аппарат с устройством управления по крену или тангажу при транспортировке расходуемой по весу нагрузки (варианты) | 2022 |
|
RU2796596C1 |
| БЕСПИЛОТНЫЙ КОМПЛЕКС ДЛЯ АВИАЦИОННО-ХИМИЧЕСКИХ РАБОТ | 2023 |
|
RU2817270C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2024 |
|
RU2826651C1 |
| Конвертоплан | 2019 |
|
RU2723516C1 |
| Стенд испытания и настройки беспилотных летательных аппаратов различной конфигурации | 2022 |
|
RU2781047C1 |
Изобретение относится к авиационной технике, а именно к малоразмерным беспилотным летательным аппаратам. Беспилотный летательный аппарат вертолетного типа содержит цилиндрический корпус, в центральной части которого по оси его симметрии размещена силовая установка с двумя соосными винтами противоположного вращения, закрепленными на валах электродвигателей, несколько управляющих лопаток, находящихся внутри корпуса в зоне действия воздушного потока от винтов и закрепленных на валах соответствующих сервоприводов. Количество лопаток и соответствующих сервоприводов равно трем. Каждая лопатка является фигурной многосоставной, состоит из двух или более вставленных друг в друга замкнутых жестких полос, криволинейные поверхности которых соответствуют боковым поверхностям эллиптических цилиндров, образующие прямые которых при нейтральном положении сервоприводов имеют вертикальное направление. Ось вращения каждого сервопривода лежит в средней горизонтальной секущей плоскости лопатки и совпадает с осями ее эллипсов-сечений. Обеспечивается уменьшение массы аппарата и снижение его энергопотребления. 5 ил.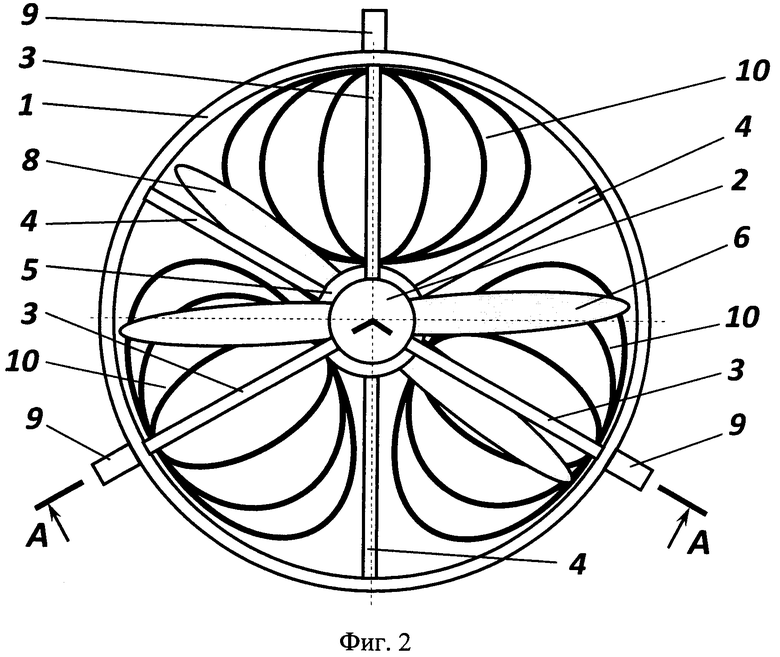
Беспилотный летательный аппарат вертолетного типа, содержащий цилиндрический корпус, в центральной части которого по оси его симметрии размещена силовая установка с двумя соосными винтами противоположного вращения, закрепленными на валах соответствующих электродвигателей, несколько управляющих лопаток, находящихся внутри корпуса в зоне действия воздушного потока от винтов и закрепленных на валах соответствующих сервоприводов, которые равномерно распределены в нижней части корпуса по его наружной поверхности, отличающийся тем, что:
количество лопаток и соответствующих сервоприводов равно трем;
каждая лопатка является фигурной и многосоставной и состоит из двух или более вставленных друг в друга замкнутых жестких полос, криволинейные поверхности которых соответствуют боковым поверхностям эллиптических цилиндров, образующие прямые которых при нейтральном положении сервоприводов имеют вертикальное направление, причем ось вращения каждого сервопривода лежит в средней горизонтальной секущей плоскости лопатки и совпадает с осями ее эллипсов-сечений, длины этих осей для всех эллипсов-сечений лопатки равны, а длины осей, перпендикулярных оси вращения сервопривода, распределяются согласно формуле:
где  - длина i-ой оси, i=1…n, n - количество вставленных друг в друга цилиндров, а - длина оси внешнего цилиндра,
- длина i-ой оси, i=1…n, n - количество вставленных друг в друга цилиндров, а - длина оси внешнего цилиндра,
высота полос цилиндрических поверхностей составляет (0,1…0,3)R, где R - радиус цилиндрического корпуса аппарата; габаритные размеры лопаток и высота их расположения относительно нижней кромки корпуса выбраны таким образом, чтобы при максимальном угловом отклонении лопаток они не касались друг друга, внутренней поверхности корпуса, нижнего винта и поверхности земли;
силовая установка закреплена в корпусе аппарата с помощью трех пустотелых балок, угол между каждыми соседними балками равен 120°;
цилиндрический контейнер оборудования с диаметром в несколько раз меньше диаметра корпуса аппарата, заключающий в себе источник питания, электронные блоки и полезную нагрузку, расположен соосно с корпусом аппарата и закреплен с помощью таких же трех пустотелых балок над его верхней кромкой.
| US 7510142 B2, 31.03.2009 | |||
| US 9725170 B2, 08.08.2017 | |||
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ (МБЛА ВВП) | 2011 |
|
RU2455198C1 |
| US 5295643 A1, 22.03.1994 | |||
| FR 3006294 B3, 25.12.2015 | |||
| US 20060049304 A1, 09.03.2006. | |||

