Универсальный силовой манипулятор (далее – манипулятор) является универсальным устройством для силового манипулирования различного рода объектами и/или группами объектов природного и/или искусственного происхождения и/или их свойствами, например, досками, трубами, канатами, изделиями различного назначения, контейнерами, частями растений и организмов, в частности, для их зажимания, стягивания, перемещения и фиксирования пространстве, натяжения, выгибания, разрезания, управления их формой и иными параметрами.
Он может быть использован в машиностроении, лесной и деревообрабатывающая промышленности, бытовом, туристическом, спортивном, медицинском, рыболовном оборудовании, в работе художников и дизайнеров, а также в иных областях человеческой деятельности.
Из существующего уровня техники широко известны рычажные, резьбовые, гидравлические, пневматические приспособления и инструменты для выполнения перечисленных выше операций, например, тиски, струбцины, трубогибы, талрепы, лебедки, которые, как правило, сложны и дороги в изготовлении, имеют узкую специализацию, то есть рассчитаны на выполнение ограниченного числа однотипных операций и работают с ограниченным ассортиментом объектов и материалов.
Целью настоящего изобретения является манипулятор, в значительной степени лишенный указанных недостатков, и обладающий следующими свойствами:
1. Один и тот же экземпляр манипулятора может быть применен для силового манипулирования отдельными объектами и/или группами объектов природного и/или искусственного происхождения, размеры которых могут различаться на несколько порядков, например в 100 раз и более, и, в большинстве случаев, независимо от их физических свойств.
2. Манипулятор или несколько манипуляторов могут быть, одновременно или по очереди, установлены и закреплены непосредственно на объекте или группе объектов манипулирования без демонтажа и предварительной подготовки последних, без дополнительных крепежных приспособлений, и без дополнительных опор, и в любой момент могут быть сняты и перемещены в другое место.
3. Один и тот же экземпляр манипулятора может устанавливаться как непосредственно на объекты манипулирования, так и дистанционно и действовать без ухудшения своих силовых характеристик на необходимом для решения текущей задачи расстоянии от объектов манипулирования без их демонтажа и предварительной подготовки, причем объекты манипулирования могут быть закрыты от манипулятора сторонними предметами, например, деревьями, камнями, неровностями почвы.
4. При использовании манипулятора для перемещения объектов манипулирования, без изменения положения самого манипулятора, величина перемещения составляет, ориентировочно, 50% от расстояния между манипулятором и начальным положением объектов манипулирования, то есть при расстоянии до объектов манипулирования 100 м, они могут быть перемещены на 50 м.
5. Манипулирование может осуществляться как вручную, так и с применением электрических, пневматических и/или иных инструментов, например, гайковертов, винтовертов, шуруповертов.
Заявленный результат достигается за счет того, что для захвата и/или удержания объектов манипулирования и приложения к ним необходимых усилий манипулятор содержит одно или несколько гибких соединений, одинаковых или различающихся, каждое из которых представляет собой отрезок или петлю, или любую возможную комбинацию отрезков и петель из канатов, веревок, шнуров, лент, проволок, тросов и иных гибких элементов, свойства которых, например, упругость, пластичность, прочность на разрыв, форма и площадь поперечного сечения, могут быть специально подобраны для использования в конкретной ситуации, объединенных каким-либо способом, например, связыванием узлами и/или с применением элементов крепления, например, скрепок, зажимов, в конструктивно законченный блок.
Причем изобилие и разнообразие распространенных в быту и на производстве всякого рода гибких элементов позволяет подбирать подходящие из находящихся под руками. А с учетом того, что сторонние гибкие элементы можно брать только во временное пользование для решения текущей задачи, количество гибких элементов различных физических свойств, применяемых в каждом конкретном экземпляре манипулятора, практически, не ограничено.
Это позволяет создавать простые и дешевые конструкции, иногда с уникальными свойствами, которые сложно получить другими способами.
Манипулятор состоит из основания и/или в качестве основания использует сторонние объекты природного и/или искусственного происхождения, и содержит один или большее количество модулей, представляющих собой конструктивно законченные составные части манипулятора, как неподвижные относительно основания, например, являющиеся его частью, так и имеющие возможность изменения расположения, или выносные, не связанные с основанием.
Модули могут быть сменными и состоять из одного или более элементов, например, роликов, зажимов, рычагов, направляющих поверхностей, а также могут содержать другие модули, то есть субмодули, и сами входить в состав других модулей, то есть быть их субмодулями.
Из этих модулей, один или несколько могут быть контактными модулями и применяться для контакта с объектами манипулирования и/или иными сторонними объектами, и один или несколько модулей тяговые, которые применяются для оказания силовых воздействий на объекты манипулирования и/или на другие модули.
Для этого каждый тяговый модуль содержит два или более субмодуля, среди которых, как минимум, один субмодуль используется для управления силовым воздействием, то есть является управляющим субмодулем, и выполнен с возможностью вращения относительно, как минимум, одного субмодуля с частично или полностью ограниченной возможностью вращения относительно всего манипулятора в целом, и являющегося тормозящим субмодулем.
Причем управляющий и тормозящий субмодули сопряжены через какой-либо механизм сцепления с постоянными или регулируемыми характеристиками сцепления, содержащий, например, фрикционную муфту, храповой механизм, что дает возможность оказывать определенное расчетное противодействие вращению управляющего субмодуля относительно сопряженного с ним тормозящего субмодуля и, следовательно, относительно всего манипулятора в целом.
При своей работе, в зависимости от решаемой задачи, манипулятор может быть установлен или непосредственно на объекты манипулирования, опираясь на них контактными модулями, или, используя внешнюю опору, например, стену, дерево, на каком-либо расстоянии от объектов манипулирования, которое ограничено только свойствами применяемых гибких соединений и/или внешними непреодолимыми преградами, например, стеной, скалой.
И объекты манипулирования, соединяются посредством одного или нескольких гибких соединений, которые могут объединяться в многозвенные гибкие соединения, в частности, содержащие модули и субмодули, например, направляющие, предохранительные, с одним или несколькими управляющими субмодулями, вращение которых приводит к свиванию гибких соединений в одну или более спиралей и, таким образом, к уменьшению длины и/или натяжению гибких соединений.
Это дает возможность оказывать необходимое силовое воздействие на объекты манипулирования путем изменения шага спиралей при одновременном или последовательном вращении управляющих субмодулей в ту или иную сторону, и/или изменением расположения контактных и других модулей.
Объекты манипулирования могут быть закрыты от манипулятора сторонними предметами, например, деревьями, камнями, неровностями почвы, которые гибкие соединения могут огибать, скользя по ним, или обходить с помощью выносных направляющих модулей.
Чтобы управление манипулированием осуществлялось удобным и привычным для человека способом, а именно только простым вращением управляющих субмодулей в ту или иную сторону без дополнительной их фиксации, подобно водопроводным или газовым вентилям, характеристики сцепления управляющих субмодулей с сопряженными с ними тормозящими субмодулями могут быть подобраны с таким расчетом, чтобы создаваемое в результате данного сцепления противодействие вращению управляющих субмодулей было, с одной стороны, достаточно сильным, чтобы без применения дополнительных фиксирующих приспособлений, например, храповых механизмов, предотвратить самопроизвольное развивание спиралей гибкого соединения, а с другой стороны, достаточно слабым, чтобы не препятствовать управлению процессом манипулирования путем вращения управляющих субмодулей.
Причем для обеспечения необходимого сцепления, сопряженные управляющий и тормозящий субмодули могут быть прижаты друг к другу только силой натяжения гибкого соединения и/или объекта манипулирования без использования дополнительных приспособлений, например, пружин, и выбором способа сцепления можно обеспечить плавное или ступенчатое с заданным шагом вращение управляющих субмодулей.
В частности, при использовании в качестве механизма сцепления зубчатой асинхронной асимметричной муфты, состоящей из дисков или колец, контактирующих друг с другом торцовыми поверхностями с радиально ориентированными выступами в виде зубцов, имеющих в поперечном сечении форму треугольника, и обладающими возможностью асинхронного вращения, то есть возможностью вращения относительно друг друга с перескакиванием зубцов одного кольца через зубцы другого, например, вследствие упругости гибкого соединения и/или объектов манипулирования, количеством зубцов может быть задан минимальный угол поворота управляющего субмодуля, то есть шаг изменения воздействия на объект манипулирования, а выбором высоты зубцов и углов наклона их сторон могут быть обеспечены необходимые характеристики сцепления, в частности, асимметрия, то есть разные параметры сцепления при вращении в разные стороны.
Для предохранения от развивания спиралей гибкого соединения при неконтролируемых внешних воздействиях, например, при случайных ударах, манипулятор может содержать приспособления для блокирования вращения управляющих субмодулей, например, стопоры, защелки.
С учетом свойств обслуживаемых объектов манипулирования и решаемых задач, конструкция манипулятора может быть упрощена, например, в качестве гибких соединений могут быть использованы части самих объектов манипулирования, силовое воздействие можно оказывать только изменением расположения модулей, гибкие соединения могут быть заменены на другие, например, на резьбовые.
Управление манипулятором, может осуществляться как вручную, так и с применением электрических, пневматических и/или иных инструментов, например, гайковертов, винтовертов, шуруповертов, а также манипулятор может содержать в своем составе и/или использовать сторонние приспособления, например, рукоятки, захваты, струбцины, гаечные и специальные ключи, отвертки, а также элементы для подключения инструментов, например, шлицы, головки, специальные насадки.
Манипулятор может быть выполнен как в переносном, так и стационарном варианте, и может использоваться как для индивидуального применения, так и входить в состав различных изделий, например, механизмов, конструкций, приспособлений, в качестве их сменных или неотъемлемых частей, и, в частности, использовать их элементы в качестве основания и/или других модулей, и, при возможности, не содержать собственных модулей кроме тяговых.
На Фиг. 1 показан один из возможных вариантов реализации манипулятора – экспериментальный образец в комплектации, ориентированной на применение в сфере ландшафтного дизайна для управления формой и направлением роста ветвей и лоз с целью формирования крон деревьев, создания живых беседок и т.п., а также для работы с иными объектами, например, с пластиковыми трубопроводами, кабелями и т.п.
Все детали манипулятора изготовлены из отрезков стандартных труб круглого и прямоугольного сечения с использованием простейших операций резки, сверления и сварки. Габаритные размеры в показанном положении 270 х 270 х 40 мм.
Объектом манипулирования 1 в данном случае является виноградная лоза.
В состав конструкции входят:
1. Основание 2, на котором установлены тяговые модули 3.1-3.4.
2. Сменные контактные модули 6.
3. Сменные раздвижные рычаги 7 для управления положением контактных модулей 6.
4. Гибкие элементы 8.1-8.4, в данном случае – отрезки широко распространенных полиамидных канатов диаметром 4 мм, с прочностью на разрыв 3700Н (согласно ГОСТ ISO 1140-2013), сложенные вдвое и вставленные в тяговые модули 3.1-3.4.
На Фиг. 2 манипулятор показан в процессе работы.
Манипулятор прижимается контактными модулями 6 к объекту манипулирования 1 и обхватывает его гибкими элементами 8.1-8.3, с образованием, таким образом, трех гибких соединений 9.1-9.3.
Гибкий элемент 8.4 соединяет раздвижные рычаги 7, образуя гибкое соединение 9.4.
Манипулирование осуществляется путем свивания в необходимой степени в спирали гибких соединений 9.1-9.4 тяговыми модулями 3.1-3.4.
На Фиг. 3, а, Фиг. 3, б показано устройство одного из тяговых модулей 3.1-3.4, например, для определенности - тягового модуля 3.1, представляющего собой сопряженную пару управляющего субмодуля 4, содержащего сменную рукоятку 10 и направляющие элементы 11, и тормозящего субмодуля 5 в ненагруженном и в рабочем состоянии, соответственно.
Механизм сцепления представляет собой зубчатую асинхронную ассиметричную муфту, состоящую из колец A и B, контактирующих торцовыми поверхностями с нанесенными на них зубцами, имеющими в поперечном сечении форму треугольника.
Кольцо A является частью тормозящего субмодуля 5, неподвижного относительно основания 2 и, следовательно, всего манипулятора, а кольцо B является частью управляющего субмодуля 4.
Асинхронность муфты (т.е возможность проворачивания зубчатых колец относительно друг друга в процессе работы) возможна, благодаря упругости гибкого соединения 9.1 и/или объекта манипулирования 1, которая допускает перемещение кольца B вдоль оси OS и позволяет происходить перескакиванию его зубцов через зубцы кольца A.
Данная конструкция муфты позволяет достаточно просто сделать управление манипулированием удобным и привычным для человека, состоящем только в простом вращении рукоятки 10 в ту или иную сторону, подобно водопроводному или газовому вентилю.
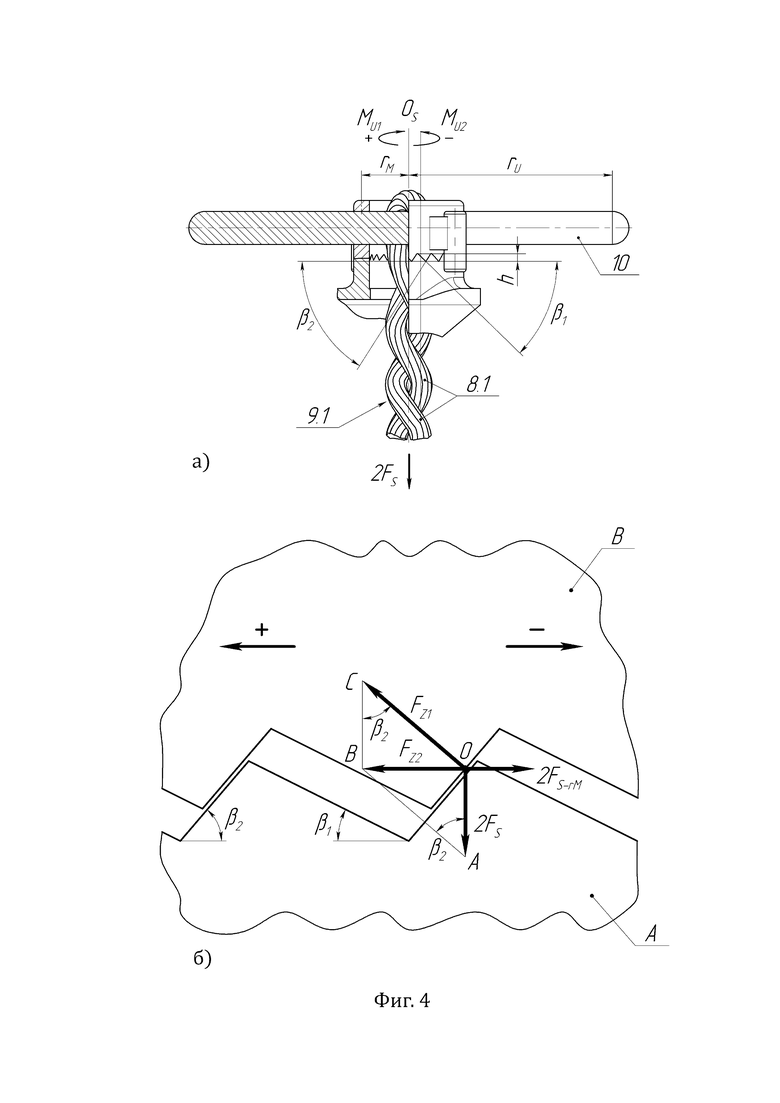
На Фиг. 4, а и Фиг. 4, б показан принцип работы механизма сцепления.
Кольца прижимаются друг к другу силой, действующей вдоль оси OS со стороны гибкого соединения 9.1, созданного из отрезка гибкого элемента 8.1, продетого сквозь кольца A и B и опирающегося на середину рукоятки 10, свитого в две одинаковые спирали, каждая из которых создает тяговую силу FS, и, таким образом, суммарную тяговую силу 2FS .
Углы наклона сторон зубцов β1 и β2, в общем случае, разные, что обеспечивает асимметричность в работе муфты, т.е. разные характеристики сцепления при вращении в ту или иную сторону.
Для вращения управляющего субмодуля 4 в направлении свивания и развивания спиралей гибкого соединения 9.1 к нему требуется приложить, соответственно, моменты силы  и
и  , такие, что
, такие, что
 , (1)
, (1)
 , (2)
, (2)
где  - момент силы, достаточный для преодоления сопротивления со стороны одной из двух спиралей гибкого соединения 9.1, т.е равный по модулю моменту, действующему со стороны одной из двух спиралей гибкого соединения 9.1, стремящегося к развиванию;
- момент силы, достаточный для преодоления сопротивления со стороны одной из двух спиралей гибкого соединения 9.1, т.е равный по модулю моменту, действующему со стороны одной из двух спиралей гибкого соединения 9.1, стремящегося к развиванию;
 и
и  - моменты сил, достаточные для преодоления сопротивления со стороны муфты сцепления, создаваемого спиралями гибкого соединения 9.1 при их свивании и развивании, соответственно.
- моменты сил, достаточные для преодоления сопротивления со стороны муфты сцепления, создаваемого спиралями гибкого соединения 9.1 при их свивании и развивании, соответственно.
Указанные моменты сил действуют относительно общей оси OS, совпадающей с продольной осью гибкого соединения 9.1 и центрами колец A и B. В скалярной форме, без учета сил трения:
 , (3)
, (3)
 , (4)
, (4)
 , (5)
, (5)
 , (6)
, (6)
 , (7)
, (7)
где  и ,
и ,  – силы, действующие на концы рукоятки 10 при регулировании и соответствующие моментам
– силы, действующие на концы рукоятки 10 при регулировании и соответствующие моментам  и
и  ;
;
rU – расстояние от оси OS до концов рукоятки 10 (т.е. плечо сил FrU1 и FrU2);
 и
и  – силы, соответствующие моментам
– силы, соответствующие моментам  и
и  , т.е. действующие перпендикулярно оси OS на расстоянии rM от нее на кольцо B, достаточные для обеспечения скольжения зубцов кольца B по зубцам кольца A, т.е. наклонным плоскостям с углами наклона β1 и β2, приводящего к перемещению кольца B параллельно оси OS против силы 2FS , и перескакиванию его зубцов через зубцы кольца A;
, т.е. действующие перпендикулярно оси OS на расстоянии rM от нее на кольцо B, достаточные для обеспечения скольжения зубцов кольца B по зубцам кольца A, т.е. наклонным плоскостям с углами наклона β1 и β2, приводящего к перемещению кольца B параллельно оси OS против силы 2FS , и перескакиванию его зубцов через зубцы кольца A;
rM – расстояние от оси OS до середины торцовых зубчатых поверхностей колец A и B (т.е. плечо сил , и FS-rM);
FS-rM – сила, действующая на кольцо B перпендикулярно оси OS на расстоянии rM от нее, соответствующая моменту, создаваемому одной из двух спиралей стремящегося к развиванию гибкого соединения 9.1, и равного по модулю моменту  ;
;
kM – коэффициент, равный отношению FS-rM/FS .
На Фиг. 4, б стрелками со знаками "+" и "–" показано направление перемещения зубцов кольца B при, соответственно, свивании и развивании спиралей.
Направление "–" в сторону развивания спиралей (на Фиг. 4, б - вправо) соответствует прижиманию зубцов кольца B к граням зубцов кольца A с углом наклона  и скольжению по ним (на Фиг. 4, б - вверх), как по наклонной плоскости до перескакивания через них. В этом направлении действует сила 2FS-rM, со стороны стремящихся к развиванию спиралей и, чтобы сделать невозможным их самопроизвольное развивание во всем диапазоне работы манипулятора, должно выполняться условие:
и скольжению по ним (на Фиг. 4, б - вверх), как по наклонной плоскости до перескакивания через них. В этом направлении действует сила 2FS-rM, со стороны стремящихся к развиванию спиралей и, чтобы сделать невозможным их самопроизвольное развивание во всем диапазоне работы манипулятора, должно выполняться условие:
 ,
,
или из (6) и (7)
 .
.
На Фиг. 4, б показаны силы, действующие на зубцы колец A и B.
Сила  , равная по величине силе , но противоположная по направлению, представлена суммой двух сил: силой
, равная по величине силе , но противоположная по направлению, представлена суммой двух сил: силой  , прижимающей кольцо B к кольцу A, и силой
, прижимающей кольцо B к кольцу A, и силой  реакции опоры противодействия со стороны наклонных под углом
реакции опоры противодействия со стороны наклонных под углом  поверхностей зубцов кольца A.
поверхностей зубцов кольца A.
Из прямоугольного треугольника AOB, у которого силы и  являются катетами:
являются катетами:
 , или
, или  , (8)
, (8)
и, рассуждая аналогично, для 
 , или
, или  . (9)
. (9)
Тогда из (7) и (8)
 ,
,
или, упрощая,
 .
.
Таким образом, чтобы самопроизвольное развивание спиралей гибкого соединения 9.1 было невозможным во всем диапазоне работы манипулятора, достаточно, чтобы выполнялось условие:
 . (10)
. (10)
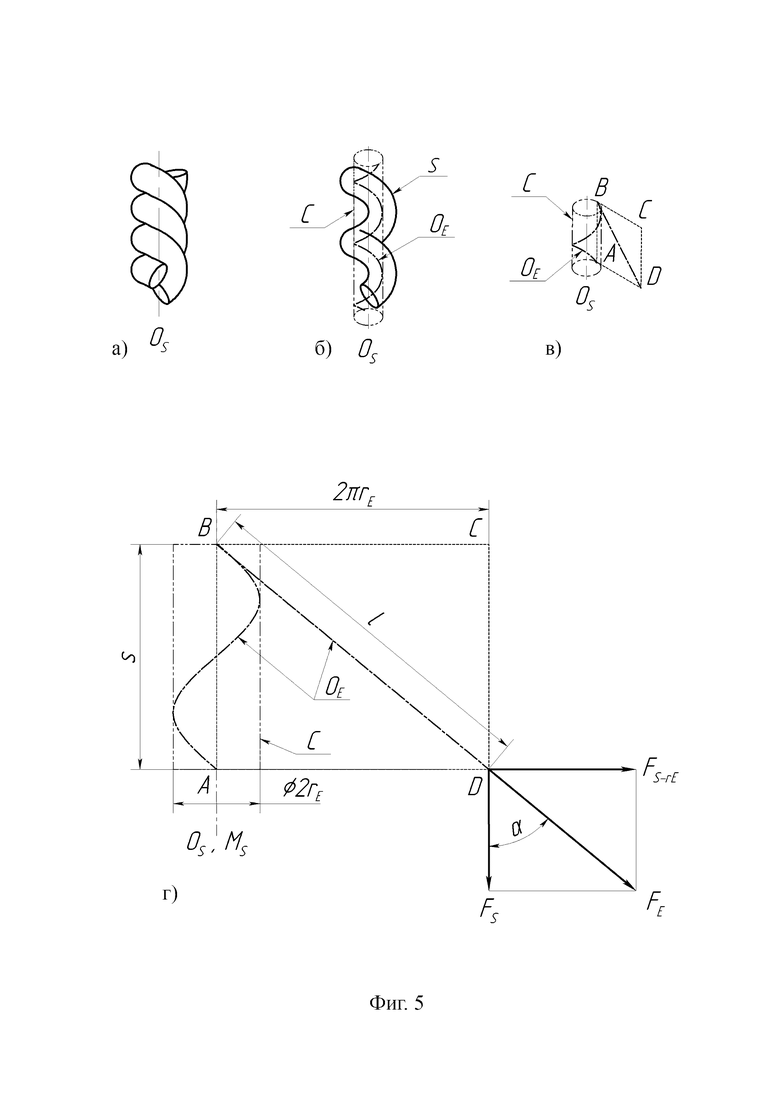
Расчет коэффициента kM удобно провести на примере гибкого соединения, фрагмент которого изображен на Фиг. 5, а, представляющего собой, два отрезка гибкого элемента круглого поперечного сечения свитые в две спирали вокруг оси OS.
Поскольку обе спирали идентичны, на Фиг. 5, б рассматривается только одна спираль S. Так как обе спирали плотно прижаты друг к другу, средние оси OE образующих их гибких элементов лежат на воображаемой цилиндрической поверхности C, радиус основания которой равен радиусу rE поперечного сечения гибкого элемента.
Для упрощения расчетов предполагается, что точки приложения всех сил, действующих на гибкий элемент, лежат на его средней оси OE, и во всем диапазоне их действия гибкий элемент не растягивается в длину, а также сохраняет круглую форму и диаметр поперечного сечения.
На Фиг. 5, в показана часть цилиндрической поверхности С, соответствующая одному витку спирали S и лежащий на ней отрезок оси OE гибкого элемента с концами в точках A и B.
Векторы сил, действующих на гибкий элемент в точках A и B, лежат в плоскости, касательной к цилиндрической поверхности С в этих точках. Для наглядности, часть цилиндрической поверхности С, соответствующая одному витку спирали S, развернута в плоский прямоугольник ABCD, лежащий в этой касательной плоскости. Высота прямоугольника ABCD равна шагу s спирали S, ширина равна 2πrE (т.е. длине окружности основания цилиндрической поверхности C), а ось OE гибкого элемента совпадает с диагональю BD.
На Фиг. 5, г для удобства рассмотрения, прямоугольник ABCD и действующие силы изображены в ортогональной проекции.
Сила FE натяжения гибкого элемента представляет векторную сумму двух сил:
1) Силы FS-rE, соответствующей моменту  и действующей на расстоянии rE от оси OS, т.е. в скалярной форме:
и действующей на расстоянии rE от оси OS, т.е. в скалярной форме:
 (11)
(11)
2) Силы  , параллельной оси OS.
, параллельной оси OS.
Из треугольника ABD, катеты которого AB и AD соответствуют силам FS и FS-rE , отношение этих сил, в общем случае:
 (12)
(12)
Все силы, а также угол α и tgα, достигают наибольших значений, когда спирали гибкого соединения свиты в максимально возможной степени, т.е. когда их шаг s достиг минимального значения и витки максимально прижаты друг к другу в направлении оси OS.
В этом предельном случае шаг s спиралей равен двум диаметрам гибкого элемента, т.е. s = 4rE, и удобно ввести коэффициент kE, равный максимально возможному отношению силы  к силе
к силе  , т.е. максимально возможному
, т.е. максимально возможному  :
:
 (13)
(13)
Так как силы  и
и относятся к одному моменту
относятся к одному моменту  , то их величины обратно пропорциональны расстояниям от точек их приложения до общей оси, и из (7) и (11):
, то их величины обратно пропорциональны расстояниям от точек их приложения до общей оси, и из (7) и (11):
 (14)
(14)
и, возвращаясь к определению минимально допустимой величины угла  , так как
, так как
 и
и  (15)
(15)
то из (13)
и
 (16)
(16)
Таким образом, из условия (10):
 .
.
В приведенном примере манипулятора rE = 2 мм, и rM = 12 мм, тогда:
 .
.
Угол β1 (он может быть значительно меньше угла β2), а также количество и высота h зубцов муфты сцепления выбираются из соображений удобства и с учетом физических свойств гибких соединений, которые могут применяться в данном варианте конструкции манипулятора и/или объектов манипулирования, с которыми предполагается работать.
Важным является коэффициент kL равный отношению длины l одного витка к шагу s максимально свитых спиралей, или, что то же самое, отношению длины гибкого соединения в полностью развитом состоянии к его длине в предельно свитом состоянии, то есть рабочий диапазон манипулятора.
Длина l одного витка в предельно свитом состоянии, получается из прямоугольного треугольника ABD (где l – гипотенуза BD):
 ,
,
или
 ;
;
тогда
 . (17)
. (17)
Таким образом, из приведенных расчетов следует, что у манипуляторов с гибкими соединениями рассматриваемого типа, рабочий диапазон, то есть максимальное изменение длины их гибких соединений, не зависит от диаметра используемых в них гибких элементов и полностью определяется коэффициентом kL, который является безразмерной константой.
В рассматриваемом предельном случае, коэффициент kL определяет, также, отношение силы FE натяжения гибкого элемента вдоль его собственной оси OE к силе FS, действующей на объект манипулирования:

В приведенном примере манипулятора предел прочности на разрыв сложенных вдвое гибких элементов 8.1-8.4 из полиамидных канатов диаметром 4 мм равен:

тогда предел прочности гибких соединений 9.1-9.4 (то есть предельная сила, с которой каждое из них может действовать на объект манипулирования):
 ,
,
что в 2-3 раза превышает силы, применяемые на практике.
При необходимости, допустимые силовые нагрузки можно значительно увеличить, например, применив гибкие элементы из кевлара (арамида).
Можно оценить величину силы 2FS, с которой манипулятор действует на объект манипулирования.
Из (1), момент силы, действующей на одну спираль:
или, из (3), (9), (11), (15):
 ,
,
Откуда
 ,
,
и, окончательно,
 , (18)
, (18)
В рассматриваемом примере длина рукоятки 10 управляющего субмодуля 4 составляет 0,1 м (т.е. rU = 0,05 м) и при вращении вручную, к каждому ее концу могут прилагаться силы  до 100Н, rE = 2 мм = 0,002 м, rM = 12 мм = 0,012 м, а угол
до 100Н, rE = 2 мм = 0,002 м, rM = 12 мм = 0,012 м, а угол  (т.е.
(т.е.  ), тогда из (18):
), тогда из (18):
 ,
,
и сила натяжения обеих спиралей гибкого соединения 9.1, то есть сила с которой манипулятор действует на объект манипулирования:
 .
.
На Фиг. 6 изображена схема дистанционного манипулирования.
Манипулятор M опирается контактными модулями 6 на какие-либо внешние опоры 12, например, стены, деревья. Между объектами манипулирования 1 и манипулятором M расположены препятствия 13 и 14.
Гибкое соединение 9 свивается в спирали при вращении рукоятки 10 тягового модуля 3 и, огибая препятствия 13 и 14, притягивает объекты манипулирования 1 друг к другу и, одновременно, тянет их в направлении манипулятора M. Гибкое соединение 9 скользит по поверхности препятствия 13, а препятствие 14 огибает с помощью выносного модуля 15.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗГОТОВЛЕНИЯ БРОНИРОВАННОГО КАБЕЛЯ, РАМОЧНАЯ КРУТИЛЬНАЯ МАШИНА И УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ БРОНИРОВАННОГО КАБЕЛЯ | 2019 |
|
RU2702612C1 |
| ИМПЛАНТИРУЕМЫЙ ПРОТЕЗ КЛАПАНА СЕРДЦА | 2021 |
|
RU2789041C1 |
| Переносное устройство для регулирования натяжения | 2019 |
|
RU2730596C2 |
| ТРАНСПОРТЕР ДЛЯ ПОДАЧИ СУХИХ МАТЕРИАЛОВ | 2007 |
|
RU2397935C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МЕТОДА МАГНИТНОГО КОНТРОЛЯ | 2017 |
|
RU2684949C1 |
| Устройство для контроля качества навивки спирали для тел накала источников света | 1990 |
|
SU1774395A1 |
| ЧЕРВЯЧНЫЙ ХОМУТ | 1996 |
|
RU2119116C1 |
| Устройство для изменения диаметра трубчатых элементов "Самара | 1986 |
|
SU1433576A1 |
| Гаситель колебаний проводов воздушных линий электропередачи | 2020 |
|
RU2750616C1 |
| Командоаппарат | 1979 |
|
SU886093A1 |

Универсальный силовой манипулятор для манипулирования объектами, например контейнерами, трубами, досками, канатами, частями растений и организмов, в частности, для их перемещения и фиксирования в пространстве, изменения формы, натяжения, и может быть использован в машиностроении, медицине, быту, туризме и иных областях. Манипулятор выполнен с возможностью установки на объекты или на расстоянии от них и соединения с ними гибкими соединениями посредством гибких элементов и обеспечением силового воздействия свиванием гибких соединений в спирали через механизмы сцепления, в частности асинхронные асимметричные зубчатые муфты, фрикционные муфты и храповые механизмы. 1 з.п. ф-лы, 6 ил.
1. Универсальный силовой манипулятор, содержащий гибкие элементы и основание, на котором расположены контактные модули, отличающийся тем, что контактные модули выполнены неподвижными или перемещаемыми относительно основания, и на основании расположен, по меньшей мере, один тяговый модуль, содержащий сопряженную пару субмодулей, один из которых является управляющим субмодулем и выполнен с возможностью вращения относительно сопряженного с ним субмодуля с ограниченной возможностью вращения относительно основания и являющегося тормозящим субмодулем, причем управляющий и тормозящий субмодули сопряжены через механизм сцепления, например зубчатую асинхронную муфту, фрикционную муфту, храповой механизм, для оказания противодействия вращению управляющего субмодуля относительно тормозящего субмодуля, при этом манипулятор выполнен с возможностью установки непосредственно на объекты манипулирования, опираясь на них контактными модулями, или на расстоянии от объектов манипулирования, опираясь контактными модулями на сторонние объекты, например стены, деревья, и создания посредством вставленных в тяговые модули гибких элементов, по меньшей мере, одного гибкого соединения объекта манипулирования с, по меньшей мере, одним управляющим субмодулем, с обеспечением свивания в спирали гибкого соединения, с изменением его длины и/или натяжения и созданием силового воздействия, управляемого путем изменения шага спиралей вращением управляющего субмодуля, при этом характеристики сцепления управляющих субмодулей с сопряженными с ними тормозящими субмодулями подобраны с таким расчетом, чтобы противодействие вращению управляющих субмодулей было, с одной стороны, достаточно сильным, чтобы предотвратить самопроизвольное развивание спиралей гибкого соединения, а с другой стороны, достаточно слабым, чтобы не препятствовать управлению процессом манипулирования путем вращения управляющих субмодулей, при этом механизм сцепления выбран с обеспечением плавного или ступенчатого с заданным шагом вращения управляющих субмодулей, и при использовании в качестве механизма сцепления зубчатой асинхронной муфты, состоящей из дисков или колец, контактирующих друг с другом торцовыми поверхностями с радиально ориентированными выступами в виде зубцов, обладающих возможностью асинхронного вращения относительно друг друга с перескакиванием зубцов одного кольца через зубцы другого, количеством зубцов задан минимальный угол поворота управляющего субмодуля, то есть шаг изменения воздействия на объект манипулирования, а выбором высоты зубцов и углов наклона их сторон обеспечены характеристики сцепления, и для управления манипулированием манипулятор содержит сменные рукоятки и приспособления для обеспечения возможности применения сторонних инструментов, например гаечных ключей, электрических и пневматических гайковертов, винтовертов, шуруповертов.
2. Манипулятор по п. 1, отличающийся тем, что для предохранения от развивания спиралей гибкого соединения, например, при случайных ударах он содержит приспособления для блокирования вращения управляющих субмодулей, например стопоры, защелки.
| Устройство для закрепления длинномерных материалов на манипуляторной машине | 1985 |
|
SU1261812A1 |
| Устройство для непрерывного прессования изделий из пластмасс и резины | 1961 |
|
SU145735A1 |
| Пловучее устройство для пучковой сплотки бревен | 1932 |
|
SU35681A1 |
| Погрузочная машина для очистки и уборки снега и мусора с железнодорожных путей | 1961 |
|
SU144196A1 |
| Устройство для укладки плодов | 1976 |
|
SU560791A1 |
| CN 105234954 A, 13.01.2016. | |||

