Изобретение относится к области учебного лабораторного оборудования и может быть использовано в учебном процессе при проведении лабораторных работ и практических занятий для закрепления профессиональных навыков персонала газотранспортной отрасли.
В настоящее время в составе газоперекачивающих агрегатов (ГПА) распространено применение центробежных нагнетателей давления перекачиваемого природного газа, оснащенных электромагнитными подшипниками вала ротора. Это позволяет существенно сократить затраты на эксплуатацию и ремонт ГПА, а также повысить надежность их работы.
Конструктивно электромагнитные подшипники ротора нагнетателя представляют собой комплект из двух радиальных и одного осевого электромагнитных подшипников. Со стороны привода ГПА радиальный электромагнитный подшипник является опорным подшипником, а совокупность радиального и осевого электромагнитных подшипников со стороны свободного конца нагнетателя составляют опорно-упорный подшипник. Управление электромагнитными подшипниками осуществляется при помощи электронной системы управления, регулирующей силу тока в электромагнитах таким образом, чтобы обеспечить минимальный воздушный зазор между ротором и статором нагнетателя.
Обучение эксплуатирующего персонала на действующем ГПА, оснащенном электромагнитными подшипниками вала ротора нагнетателя и электронной системой управления, сопряжено с трудностями, связанными с ограничениями, продиктованными требованиями правил производственной безопасности и режимом работы газотранспортной системы. В связи с этим возникает разрыв между получаемыми знаниями и практическими навыками по причине невозможности воспроизведения различных нештатных ситуаций и способов их устранения.
Создание учебного стенда, позволяющего восполнить указанный недостаток, является актуальной проблемой.
Известна установка для исследования роторных систем (патент РФ № RU 2 701 198 C1, G01M 13/04, опубликован 25.09.2019), содержащая корпус, установленный на станине и имеющий резьбовые отверстия для крепления элементов смазочной системы, выполненных в виде фитингов, вал, связанный через муфту с электродвигателем, зафиксированным на станине с помощью кронштейна. На корпусе смонтирована крышка, в которой установлен винт, фиксирующий датчик силы, подшипниковые узлы, имеющие корпуса, на которых винтами закреплены крышки, в которых выполнены резьбовые отверстия, с установленными в них датчиками перемещения, датчиками давления, датчиками температуры. При этом один подшипниковый узел имеет дополнительно датчик частоты вращения, уплотнения, установленные в крышке. Также установка имеет модуль с многозонной подачей смазочного материала, установленный на одном подшипниковом узле, содержащий рассеиватель, прокладку и крышку, в которой выполнены резьбовые отверстия для крепления соединительных элементов, связанных гидравлическими шлангами со смазочной системой. Кроме того, установка имеет два контура подачи смазочного материала, включающих сервоклапаны, фильтры, нагревательные элементы, расходомеры, гидропневмоаккумуляторы с клапанами и гидравлическими шлангами, на другом подшипниковом узле установлен подшипник качения, дополнительно введен блок управления, сбора и обработки сигналов, входы которого связаны с датчиком частоты вращения, датчиками температуры, датчиками перемещения, датчиком давления, датчиком силы, расходомерами, а выходы - с сервоклапанами, электродвигателем, насосами и нагревательными элементами.
Известна установка для исследования роторных систем с активным управлением (патент РФ № RU 2 749 362 C1, G01M 13/04, опубликован 09.06.2021), содержащая корпус, установленный на станине, закрепленные в корпусе на валу, связанном с электродвигателем, подшипниковые узлы с датчиками перемещения, установленное в корпусе нагрузочное устройство, посаженное на вал и содержащее датчик силы, смазочную систему, включающую гидравлические элементы, установленные в резьбовых отверстиях корпуса и выполненные в виде фитингов, подключенный к ним бак со смазочным материалом, связанный гидравлическими шлангами с датчиком расхода, предохранительным клапаном и соединенным с ним тройником. При этом электродвигатель зафиксирован на станине с помощью кронштейна, на корпусе смонтирована крышка, в которой установлен болт, фиксирующий датчик силы, в подшипниках установлены внутренние втулки, посаженные на вал, подшипниковые узлы имеют корпусы, на которых закреплены крышки и планки с зафиксированными на них датчиками, согласно изобретению первый подшипниковый узел содержит подшипник скольжения, второй подшипниковый узел содержит конический подшипник скольжения с зазором между ним и валом, связанным с электродвигателем через упругодемпфирующий узел, первый подшипниковый узел дополнительно снабжен датчиком частоты вращения, а второй подшипниковый узел - датчиком давления, датчики температуры и уровня смазочного материала размещены в корпусе установки, причем электродвигатель и все датчики подключены к блоку управления, сбора и обработки сигналов. Упругодемпфирующий узел выполнен из двух полумуфт, двух сопряженных с ними демпфирующих элементов, двух стаканов, размещенных внутри полумуфт с заключенным между ними упругим элементом, причем одна полумуфта закреплена на валу электродвигателя, а вторая - на валу установки. В смазочной системе внутри бака со смазочным материалом расположены нагревательные элементы, бак связан гидравлическими шлангами с последовательно соединенными фильтром, насосной станцией и сервоклапаном, сливная магистраль оснащена коллектором и фильтром, причем насосная станция, нагревательные элементы и сервоклапан подключены к блоку управления, сбора и обработки сигналов.
Недостатками перечисленных установок является отсутствие электромагнитных подшипников вала и электронной автоматической системы управления ими, что не позволяет применить их для изучения процессов, протекающих в электромагнитных подшипниках вала ротора центробежного нагнетателя ГПА.
Известен стенд-имитатор центробежного компрессора с электромагнитными подшипниками вала ротора (опубликована статья в научно-техническом и информационном журнале «Компрессорная техника и пневматика», №6/2016, стр. 34-37), взятый нами за прототип. Стенд-имитатор содержит имитатор вращающегося вала, электронную систему управления электродвигателем и электронную систему автоматического управления электромагнитными подшипниками.
Недостатком данного учебного стенда для обучения эксплуатирующего персонала ГПА является пониженная точность автоматического регулирования положения вращающегося вала, предназначенного для имитации вала ротора центробежного нагнетателя ГПА из-за отсутствия в электронной системе автоматического управления электромагнитными подшипниками осевого канала управления осевыми электромагнитными подшипниками с адаптацией к изменению осевой статической силы, что сужает область применения стенда и не соответствует электронным системам управления электромагнитными подшипниками, применяемым на действующих технологических объектах.
Техническая проблема, решаемая предлагаемым изобретением, - создание учебного стенда для обучения эксплуатирующего персонала ГПА с повышенной точностью автоматического регулирования положения вращающегося вала, предназначенного для имитации вала ротора центробежного нагнетателя ГПА.
Технический результат от использования изобретения заключается в повышении точности автоматического регулирования положения вращающегося вала, предназначенного для имитации вала ротора центробежного нагнетателя ГПА.
Указанный технический результат достигается тем, что учебный стенд содержит имитатор вращающегося вала, электронную систему управления электродвигателем и электронную систему автоматического управления электромагнитными подшипниками, содержащую осевой канал для управления осевыми подшипниками с автоматической компенсацией статической осевой силы, действующей на вал, электрически соединенный с имитатором вращающегося вала.
Осевой канал для управления осевыми подшипниками с автоматической компенсацией статической осевой силы содержит датчик положения ротора, интегральный регулятор, пропорциональный регулятор, дифференциальный регулятор, пропорционально-дифференциальный регулятор, силовой преобразователь, два электромагнита, блок задания, каждый канал дополнительно снабжен блоком обработки сигнала вибрации, пропорциональным регулятором тока и датчиком тока, причем датчик положения ротора соединен с входом блока обработки сигнала вибрации, выход которого соединен с инверсным входом пропорционального регулятора, интегрального регулятора, дифференциального регулятора, выходы которых подключены к входу пропорционально-дифференциального регулятора, выход которого подключен к пропорциональному регулятору с обратной связью по значению силы тока в обмотках электромагнитов, выход этого регулятора соединен с входом силового преобразователя, к выходу которого подключены обмотки электромагнитов, осевой канал снабжен последовательно соединенными между собой блоком расчета осевой силы, блоком расчета смещения, дополнительным элементом сравнения, при этом, вход блока расчета осевой силы соединен с выходом интегрального регулятора, вход дополнительного элемента сравнения соединен со входом элемента сравнения и выходом блока задания, при этом блок расчета смещения расположен между выходом блока расчета осевой силы и входом дополнительного элемента сравнения.
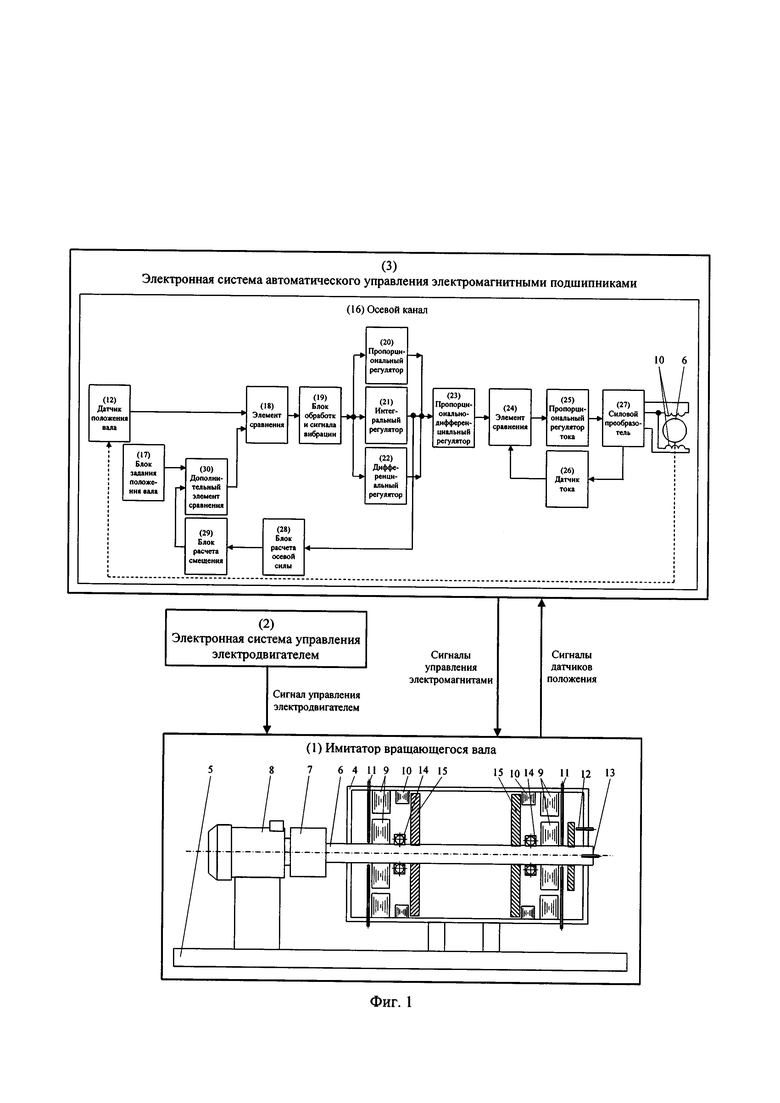
Учебный стенд (фиг. 1) содержит имитатор вращающегося вала (1), электронную систему управления электродвигателем (2) и электронную систему автоматического управления электромагнитными подшипниками (3). Имитатор вращающегося вала (1) содержит стальной корпус (4), установленный на стальной опорной раме (5), закрепленные в корпусе (4) на стальном валу (6), связанном через муфту (7) с электродвигателем (8), радиальные (9) и осевые (10) электромагнитные подшипники с датчиками радиального (11) и осевого (12) положения вала (6), датчик частоты вращения вала (13) и страховочные подшипники (14). Внутри корпуса (4) закреплены электромагнитные подшипники (9, 10) с датчиками радиального (11) и осевого (12) положения вала (6), датчик частоты вращения вала (13) и страховочные подшипники (14), необходимые для выбега вала (6) в аварийном режиме работы. На торце корпуса (4) на свободной стороне вала (6) закреплен датчик осевого положения вала (12) и датчик частоты вращения вала (13). В средней части вала (6) установлены диски (15), которые выполняют функцию упорных гребней осевых электромагнитных подшипников (10). Электронная система управления электродвигателем (2) представляет собой типовой частотный преобразователь для регулирования частоты вращения вала (6).
Осевой канал (16) электронной системы автоматического управления электромагнитными подшипниками (3) содержит датчик положения вала (12), блок задания положения вала (17), элемент сравнения (18), блок обработки сигнала вибрации (19), пропорциональный регулятор (20), интегральный регулятор (21), дифференциальный регулятор (22), пропорционально-дифференциальный регулятор (23), элемент сравнения (24), пропорциональный регулятор тока (25), датчик тока (26), силовой преобразователь (27), электромагниты осевых электромагнитных подшипников (10), блок расчета осевой силы (28), блок расчета смещения (29), дополнительный элемент сравнения (30).
Выход датчика положения вала (12) соединен со входом элемента сравнения (18), выход которого соединен со входом блока обработки сигнала вибрации (19). Выход блока обработки сигнала вибрации (19) соединен со входом пропорционального (20), интегрального (21) и дифференциального (22) регуляторов, выход интегрального регулятора (21) соединен со входом блока расчета осевой силы (28), выходы пропорционального (20) и дифференциального (22) регуляторов соединены со входом пропорционально-дифференциального регулятора (23). Элемент сравнения (24), пропорциональный регулятор тока (25) и силовой преобразователь (27) соединены последовательно и расположены между пропорционально-дифференциальным регулятором (23) и электромагнитами осевых электромагнитных подшипников (10). При этом датчик тока (26) расположен между выходом силового преобразователя (27) и входом элемента сравнения (24). Вход дополнительного элемента сравнения (30) соединен со входом элемента сравнения (18) и выходом блока задания положения вала (17), при этом блок расчета смещения (29) расположен между выходом блока расчета осевой силы (28) и входом дополнительного элемента сравнения (30).
В качестве датчика положения вала (12) может быть применен, например, индуктивный вихретоковый датчик с блоком измерения.
Силовой преобразователь (27) представляет собой, например, транзисторный широтно-импульсный преобразователь, состоящий из широтно-импульсного модулятора и транзисторного моста, собранного по трехфазной полумостовой схеме.
В качестве датчика тока (26) может быть применен, например, датчик на основе эффекта Холла с высоким быстродействием.
Блок расчета осевой силы (28) является косвенным датчиком измерения осевой силы и представляет собой блок, содержащий характеристику, позволяющую выполнить расчет компенсируемой осевыми электромагнитными подшипниками (10) статической силы на основании сигнала интегрального регулятора (21).
Блок расчета смещения (29) представляет собой блок, содержащий характеристику, определяющую величину смещения вала (6) в зависимости от текущей статической силы.
Дополнительный элемент сравнения (30) служит для коррекции значения, определяемого блоком задания положения вала (17), на основании результатов расчета смещения в блоке расчета смещения (29).
Канал автоматического управления осевыми электромагнитными подшипниками (10) с адаптацией к изменению статической силы работает следующим образом. Изначально вал (6) находится на страховочных подшипниках (14). При включении электронной системы автоматического управления электромагнитными подшипниками (3) в каждом канале датчиком положения вала (12) измеряют отклонение вала (6) от центрального положения, разницу между поддерживаемым центральным значением положения вала (6) в блоке задания положения вала (17) и значением в блоке расчета смещения (29) после дополнительного элемента сравнения (30) подают в элемент сравнения (18), где сравнивают с измеренным значением и подают на вход блока обработки сигнала вибрации (19), с выхода которого значение подают на вход пропорционального (20), интегрального (21) и дифференциального (22) регуляторов.
В соответствии с передаточными функциями, реализованными в регуляторах (20-22), сумму выходных значений этих регуляторов подают на вход пропорционально-дифференциального регулятора (23). В соответствии с переданной функцией, реализованной регулятором (23), выходное значение подают на вход элемента сравнения (24), где из этого значения вычитают значение, измеренное с помощью датчика тока (26), значение силы тока в электромагнитах осевых электромагнитных подшипников (10). Полученную разницу подают на вход пропорционального регулятора тока (25). Пропорциональный регулятор тока (25) предназначен для поддержания значения тока, пропорционального выходному значению регулятора (25), а также для компенсации постоянной времени обмоток электромагнитов осевых электромагнитных подшипников (10). Выходное значение пропорционального регулятора тока (25) подают в силовой широтно-импульсный преобразователь (27), который регулирует напряжение на электромагнитах осевых электромагнитных подшипников (10).
В результате в электромагнитах осевых электромагнитных подшипников (10) формируются такие токи, которые создают результирующую силу, поднимающую вал (6) со страховочных подшипников (14) и удерживающую его в центральном положении по датчику положения вала (12) в рабочих режимах.
Значение с выхода интегрального регулятора (21) также подают на вход блока расчета осевой силы (28), в котором происходит вычисление осевого усилия, действующего на вал (6). Полученное в блоке расчета осевой силы (28) значение передают на вход блока расчета смещения (29), в котором определяется значение необходимого уровня смещения вала (6), передаваемое на вход дополнительного элемента сравнения (30).
Подготовка учебного стенда к работе осуществляется путем включения системы автоматического управления электромагнитными подшипниками (3) и электронной системы управления электродвигателем (2). После подачи питающего напряжения на систему автоматического управления электромагнитными подшипниками (3) происходит центрирование вала (6) за счет выполнения алгоритма управления электромагнитными подшипниками (9, 10). По завершении центрирования вала (6) происходит запуск алгоритма увеличения частоты вращения вала (6), выполняемый электронной системой управления электродвигателем (2). В зависимости от задачи, поставленной в рамках текущего учебного процесса, при помощи системы автоматического управления электромагнитными подшипниками (3) в процесс автоматического центрирования вращающегося вала (6) вносятся возмущения, имитирующие различные неисправности в системе. Выключение стенда осуществляется в последовательности, обратной включению.
Правильность технического решения подтверждается вводом в эксплуатацию учебного стенда системы автоматического управления электромагнитными подшипниками вала ротора центробежного нагнетателя ГПА на учебном полигоне (г. Арзамас) Учебно-производственного центра - филиала ООО «Газпром трансгаз Нижний Новгород» и эксплуатацией идентичных систем управления на технологических объектах линейных производственных управлений.
Таким образом, предлагаемое изобретение позволяет повысить точность автоматического регулирования положения вращающегося вала, предназначенного для имитации вала ротора центробежного нагнетателя ГПА за счет осевого канала для управления осевыми подшипниками с автоматической компенсацией статической осевой силы, действующей на вал, и тем самым расширить область применения учебного стенда.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОСЕВЫМ ЭЛЕКТРОМАГНИТНЫМ ПОДШИПНИКОМ РОТОРА С АДАПТАЦИЕЙ К ИЗМЕНЕНИЮ СТАТИЧЕСКОЙ СИЛЫ | 2021 |
|
RU2777512C1 |
| Радиальная электромагнитная опора для активного магнитного подшипника | 2021 |
|
RU2763352C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2015 |
|
RU2589718C1 |
| МАГНИТНАЯ ОПОРА ДЛЯ АГРЕГАТА | 1997 |
|
RU2129228C1 |
| Система управления электромагнитным подвесом ротора | 2024 |
|
RU2831082C1 |
| Радиальная электромагнитная опора активного магнитного подшипника | 2020 |
|
RU2728916C1 |
| ПОДШИПНИК СИСТЕМЫ ЭНЕРГОНЕЗАВИСИМОГО АКТИВНОГО МАГНИТНОГО ПОДВЕСА РОТОРА | 2003 |
|
RU2246644C1 |
| СПОСОБ ВЗРЫВОЗАЩИТЫ ВСТРОЕННОГО ЭЛЕКТРООБОРУДОВАНИЯ КОМПРЕССОРНОЙ УСТАНОВКИ ДЛЯ ТРАНСПОРТИРОВКИ ВЗРЫВООПАСНЫХ ГАЗОВ | 2005 |
|
RU2303176C1 |
| УСТРОЙСТВО ВЗРЫВОЗАЩИТЫ ВСТРОЕННОГО ЭЛЕКТРООБОРУДОВАНИЯ КОМПРЕССОРНОЙ УСТАНОВКИ ДЛЯ ТРАНСПОРТИРОВКИ ВЗРЫВООПАСНЫХ ГАЗОВ | 2006 |
|
RU2315897C2 |
| СТЕНД С ЭЛЕКТРОМАГНИТНЫМ НАГРУЗОЧНЫМ МОДУЛЕМ ДЛЯ ИССЛЕДОВАНИЯ И ИСПЫТАНИЯ ЭЛЕКТРОПРИВОДОВ | 2010 |
|
RU2442995C2 |
Изобретение относится к области учебного лабораторного оборудования и может быть использовано в учебном процессе при проведении лабораторных работ и практических занятий для закрепления профессиональных навыков персонала газотранспортной отрасли. Учебный стенд системы автоматического управления электромагнитными подшипниками вала ротора центробежного нагнетателя газоперекачивающего агрегата содержит имитатор вращающегося вала, электронную систему управления электродвигателем и электронную систему автоматического управления электромагнитными подшипниками, содержащую осевой канал для управления осевыми подшипниками с автоматической компенсацией статической осевой силы, действующей на вал, электрически соединенный с имитатором вращающегося вала. Технический результат - повышение точности автоматического регулирования положения вращающегося вала, предназначенного для имитации вала ротора центробежного нагнетателя газоперекачивающего агрегата. 1 з.п. ф-лы, 1 ил.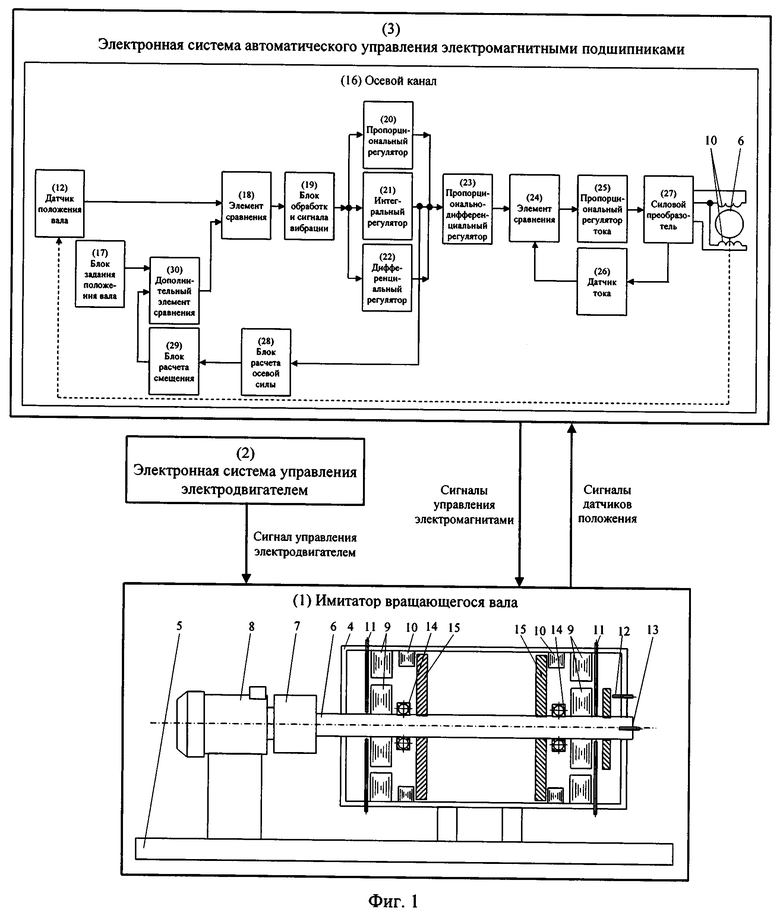
1. Учебный стенд системы автоматического управления электромагнитными подшипниками вала ротора центробежного нагнетателя газоперекачивающего агрегата, содержащий имитатор вращающегося вала, электронную систему управления электродвигателем и электронную систему автоматического управления электромагнитными подшипниками, отличающийся тем, что электронная система автоматического управления электромагнитными подшипниками дополнительно содержит осевой канал для управления осевыми подшипниками с автоматической компенсацией статической осевой силы, действующей на вал, электрически соединенный с имитатором вращающегося вала.
2. Стенд по п. 1, отличающийся тем, что осевой канал для управления осевыми подшипниками с автоматической компенсацией статической осевой силы содержит датчик положения ротора, интегральный регулятор, пропорциональный регулятор, дифференциальный регулятор, пропорционально-дифференциальный регулятор, силовой преобразователь, два электромагнита, блок задания, каждый канал дополнительно снабжен блоком обработки сигнала вибрации, пропорциональным регулятором тока и датчиком тока, причем датчик положения ротора соединен с входом блока обработки сигнала вибрации, выход которого соединен с инверсным входом пропорционального регулятора, интегрального регулятора, дифференциального регулятора, выходы которых подключены к входу пропорционально-дифференциального регулятора, выход которого подключен к пропорциональному регулятору с обратной связью по значению силы тока в обмотках электромагнитов, выход этого регулятора соединен с входом силового преобразователя, к выходу которого подключены обмотки электромагнитов, осевой канал снабжен последовательно соединенными между собой блоком расчета осевой силы, блоком расчета смещения, дополнительным элементом сравнения, при этом вход блока расчета осевой силы соединен с выходом интегрального регулятора, вход дополнительного элемента сравнения соединен с входом элемента сравнения и выходом блока задания, при этом блок расчета смещения расположен между выходом блока расчета осевой силы и входом дополнительного элемента сравнения.
| Э.В | |||
| Сусликов и др | |||
| Стенд-имитатор центробежного компрессора с электромагнитным подвесом ротора | |||
| Компрессорная техника и пневматика", N6/2016, с | |||
| Нивелир для отсчетов без перемещения наблюдателя при нивелировании из средины | 1921 |
|
SU34A1 |
| УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ РОТОРНЫХ СИСТЕМ | 2018 |
|
RU2701198C1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД ДЛЯ ИССЛЕДОВАНИЯ РОТОРНЫХ СИСТЕМ | 2016 |
|
RU2651643C1 |
| УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ РОТОРНЫХ СИСТЕМ С АКТИВНЫМ УПРАВЛЕНИЕМ | 2020 |
|
RU2749362C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2015 |
|
RU2589718C1 |

