Изобретение относится к области авиации, а именно к летательным аппаратам (ЛА) вертикального взлета и посадки - мультикоптерам с соосным расположением роторов.
Из уровня техники известны системы крепления электромоторов несущих винтов ЛА друг к другу дальними от винтов неподвижными основаниями, располагаясь зеркально на верхней и нижней сторонах луча (см., например, патенты и заявки на изобретения:
- CN 104908932, опубл. 16.09.2015;
- CN 203975218, опубл. 03.12.2014;
- US 2017/0183088, опубл. 29.06.2017;
- USD 809992, опубл. 13.02.2018;
- ЕР 3184415, опубл. 13.02.2018.
Недостатками известных из уровня техники технических решений являются:
- невозможность сближения винтов коаксиальной группы, т.к. расстояние между ними продиктовано высотой верхнего и нижнего моторов, крепежами моторов и толщиной луча, на котором они закреплены;
- отсутствие защиты винтов от соударений с внешними препятствиями. Техническими результатами заявленного изобретения являются:
- увеличение безопасности взлета, полета и приземления летательного аппарата (мультикоптера) за счет рамы, фиксирующей моторы и обводящей винты по внешнему диаметру в перпендикулярной к ним плоскости;
- увеличение эффективности коаксиальной винтомоторной группы (ВМГ) за счет уменьшения расстояния между роторами и как следствие увеличение длительности и дальности полета;
- обеспечение защиты винтов от соударений с поверхностью земли и иными препятствиями за счет использования рамы.
Технические результаты достигаются тем, что система крепления пар электродвигателей коаксиальной винтомоторной группы летательного аппарата (ЛА) включает:
- М электродвигателей несущих винтов, где М - целое четное число ≥ 2;
- N несущих рам, где N - целое число ≥ 1;
- при этом количество электродвигателей несущих винтов в К раз больше количества несущих рам, где К - целое число ≥ 2;
- при этом к середине двух внутренних противоположных, противолежащих и симметричных относительно друг друга длинных поверхностей сторон, ближним к центру, закреплены своим неподвижным основанием электродвигатели несущих винтов таким образом, что несущие винты вращаются вокруг одной оси (плоскости) перпендикулярной несущей раме, оказываясь полностью внутри нее и не соприкасаясь с ней;
- при этом соосная пара несущих винтов электродвигателей несущих винтов закреплена таким образом, что между электродвигателями несущих винтов находится только воздух, т.е. они не соединены между собой и не соприкасаются между собой.
В качестве несущих рам используются рамы в виде эллипса, прямоугольника либо параллелепипеда как замкнутого, так и разомкнутого типа.
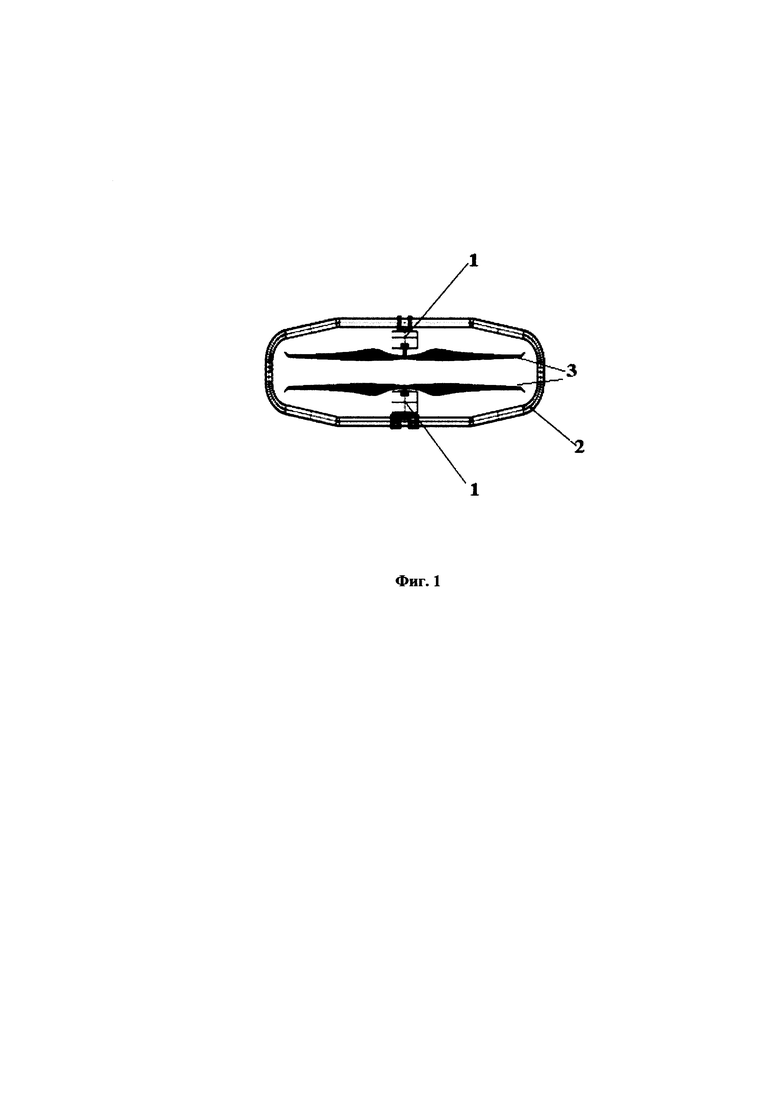
Признаки и сущность заявленного изобретения поясняются в последующем детальном описании, иллюстрируемом чертежом (см. фиг. 1), где показан пример реализации заявленной системы крепления пар электродвигателей коаксиальной ВМГ ЛА, где количество электродвигателей несущих винтов М = 2, а несущих рам N = 1.
На фиг. 1 обозначено следующее:
1 - электродвигатели (моторы) несущих винтов (пропеллеров);
2 - рама в форме эллипса;
3 - несущие винты (пропеллеры).
Для любой произвольной пары электродвигателей (1) может быть построена конструкция - рама (2), состоящая из N, где N - целое число ≥ 1 (в примере рассматривается N = 1, см. фиг. 1) - несущих эллипсоидных (либо прямоугольных, либо формы параллелепипеда, в т.ч. разомкнутого типа) рам (2), к середине двух длинных сторон которых, ко внутренней поверхности, прикреплены своим неподвижным основанием электродвигатели (1), таким образом, что винты (3) вращаются вокруг одной (отсутствующей физически) оси в перпендикулярной эллипсу рамы (2) плоскости, оказываясь полностью внутри нее и не соприкасаясь с ней.
Между плоскостями винтов (3) необходимо оставить расстояние (от 5 см), исходящее из показателей прочности и гибкости конструкции, для исключения возможности соударений при вибрации, жестком приземлении, виражах и прочем.
На центрах пропеллерах, на сторонах смотрящих друг на друга, зафиксированы капралоновые конусы, выпирающие на расстояние от 0,2 мм и более над плоскостью винта (3), но не соприкасающиеся между собой. Это позволяет даже в критической ситуации не повредить лопасти несущих винтов (3), т.к. любой удар будет принят конусами.
Соосная пара винтов (3) закрепляется таким образом, чтобы между роторами был только воздух.
Увеличение эффективности коаксиальной винтомоторной группы (ВМГ) достигается за счет уменьшения расстояния между роторами. Благодаря этому, как показало множество испытаний, тяга возрастает до 10% с той же мощностью.
Общее количество электродвигателей (1) несущих винтов (3) всего летательного аппарата может быть любым, а рассматриваемая схема коаксиальных пар винтов (3) может быть применена в произвольном количестве.
В отличие от известных из уровня техники технических решений в заявленной системе электродвигатели (1) коаксиальной пары повернуты пропеллерами (винтами 3) друг к другу так, что между роторами нет никаких конструкций, что позволяет произвольно сократить расстояние между ними, повышая таким образом эффективность, а пространственная конструкция - рама (2), фиксирующая моторы в таком положении, защищает винты (3) от соударений с поверхностью земли и иными препятствиями.
Проведенный анализ уровня техники позволил установить: аналоги с совокупностью существенных признаков, тождественных и идентичных существенным признакам заявленной «Системы крепления пар электродвигателей коаксиальной ВМГ мультикоптера» отсутствуют, что указывает на соответствие заявленной системы критерию патентоспособности «новизна».
Результаты поиска известных решений с целью выявления существенных признаков, совпадающих с отличительными от аналогов существенными признаками заявленной системы, показали, что они не следуют явным образом из уровня техники, а также не установлена известность влияния отличительных существенных признаков на указанные автором технические результаты. Следовательно, заявленное изобретение соответствует критерию патентоспособности «изобретательский уровень».
Несмотря на то, что заявленное изобретение показано и описано со ссылкой на его определенные предпочтительные варианты осуществления, специалистам в данной области техники будет понятно, что различные изменения по форме и содержанию могут быть сделаны в нем без отклонения от сущности и объема изобретения, которые определены прилагаемой формулой изобретения с учетом описания и чертежа.
На данный момент изготовлен опытный образец и успешно проведены испытания мультикоптера.
Изобретение относится к области авиации, а именно к конструкциям летательных аппаратов (ЛА) вертикального взлета и посадки – мультикоптеров. Система крепления электродвигателей несущих винтов летательного аппарата включает М электродвигателей несущих винтов, где М - целое четное число, закрепленных своим неподвижным основанием к внутренним противоположным и симметричным относительно друг друга поверхностям несущей рамы, образуя соосные пары электродвигателей несущих винтов. При этом несущие винты соосной пары вращаются вокруг одной оси, повернуты внутри несущей рамы друг к другу и не соприкасаются с ней. Между несущими винтами находится только воздух, они не соединены между собой и не соприкасаются между собой. Обеспечивается защита винтов от соударений с поверхностью земли и иными препятствиями за счет использования несущей рамы. 1 з.п. ф-лы, 1 ил.
1. Система крепления электродвигателей несущих винтов летательного аппарата, включающая М электродвигателей несущих винтов, где М - целое четное число, закрепленных своим неподвижным основанием к внутренним противоположным и симметричным относительно друг друга поверхностям несущей рамы, образуя соосные пары электродвигателей несущих винтов, при этом несущие винты соосной пары вращаются вокруг одной оси, повернуты внутри несущей рамы друг к другу и не соприкасаясь с ней, между несущими винтами находится только воздух, они не соединены между собой и не соприкасаются между собой.
2. Система по п. 1, в которой в качестве несущих рам используются рамы в виде эллипса, прямоугольника либо параллелепипеда как замкнутого, так и разомкнутого типа.
| US 10017249 B1, 10.07.2018 | |||
| АВТОМАТ ДЛЯ СБОРКИ И МНОГОТОЧЕЧНОЙ СВАРКИ ТЕПЛООБМЕННИКОВ XOJЮДИЛЬHЫX АГРЕГАТОВ | 0 |
|
SU197835A1 |
| WO 2004065208 A2, 05.08.2004 | |||
| CN 104787315 B, 13.06.2017 | |||
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1995 |
|
RU2133210C1 |

