Изобретение относится к области гидроакустики и предназначено для отождествления импульсных сигналов, обнаруженных разными гидроакустическими системами, находящимися на общем носителе, антенны которых разнесены в пространстве.
Задача интеграции гидроакустических систем, включающая отождествление сигналов, обнаруженных несколькими системами, всегда ставилась разработчиками аппаратуры [Андреев М.Я., Охрименко С.Н., Клюшин В.В., Рубанов И.Л., Яковлев В.А. Интегрированная система подводного наблюдения для надводного корабля // Морской сборник. 2006. №8. С. 50-51]. Системы, работающие в разных диапазонах частот, имеющие различные приемные антенны и (или) способы обработки информации, оптимизированы под обнаружение различных частей единого гидроакустического сигнала. Следовательно, отождествление сигналов, обнаруженных этими системами, позволит получить наиболее полную информацию о сигнале, и, как следствие, более полно распознать источник сигнала.
Известны способы отождествления [Нерославский Б.Л., Щеголева Н.Л. Об идентификации трассовых обнаружителей при многоканальном пеленговании // Гидроакустика. 2000. №2. С. 65-69, Жандаров A.M. Идентификация и фильтрация измерений состояния стохастических систем. М.: Наука. 1979], согласно которым на основании совокупности общих оценок параметров производится отождествление формуляров сигналов, обнаруженных в разных системах. Эти способы разработаны для случаев отождествления сигналов, обнаруженных в сходных системах, и обладающих большим набором общих параметров (три и более параметра). Теоретический анализ показывает высокую эффективность этих способов отождествления. Однако на практике, при интеграции сильно разнородных систем, перечень общих параметров в формулярах разных систем ограничен, и часто состоит из одного параметра - направления на сигнал. Это приводит к общему недостатку способов отождествления, который заключается в их низкой эффективности на практике.
Известен способ [Волкова А.А., Никулин М.Н. Патент РФ №2684440. Способ отождествления объектов, обнаруженных несколькими системами. Опубликовано 09.04.2019. МПК G01S 3/80], в котором для отождествления используется один параметр -направление на сигнал. В соответствии с этим способом принимают сигналы раздельно двумя системами, находящимися на общем носителе, измеряют направления на сигналы раздельно в каждой системе, формируют значения разности между направлениями на сигналы, и принимают решение об отождествлении сигналов в случае, если разность направлений меньше пороговой. Ограничением на применение способа является условие измерения направлений на сигналы из единой точки пространства. Поэтому, способ не может быть применен для пространственно-разнесенных систем, когда направления на сигнал измеряются из разных точек пространства, и даже теоретически не могут совпадать.
Наиболее близким аналогом по используемым операциям к предлагаемому изобретению является способ [Волкова А.А., Никулин М.Н. Патент РФ №2730103. Способ отождествления объектов, обнаруженных пространственно-разнесенными системами. Опубликовано 17.08.2020. МПК G01S 3/80], оптимизированный для случая, когда направления на сигнал измеряются из разных точек пространства.
Указанный способ содержит следующие основные операции: принимают сигналы раздельно двумя системами, находящимися на общем носителе, формируют в обеих системах идентичные массивы измерений каждого сигнала, осуществляя пространственную селекцию и частотно-временную обработку с применением одинакового частотного диапазона, единой частоты дискретизации и одинаковой длины выборки, формируют пары сигналов как каждый сигнал одной системы с каждым сигналом другой системы, вычисляют взаимно-корреляционную функцию между массивами измерений для каждой пары сигналов, находят максимальное значение взаимно-корреляционной функции для каждой пары, принимают решение об отождествлении для пар сигналов, для которых выполняется условие: максимальное значение взаимно-корреляционной функции более порога.
Способ основан на вычислении и анализе взаимно-корреляционной функции между массивами измерений пары сигналов, которые предварительно приведены к единому диапазону частот. Однако, если системы работают в принципиально различных, непересекающихся диапазонах частот, то приведение к единому диапазону невозможно, и, следовательно, корреляция между сигналами не может быть обнаружена. Тогда, если необходимо обнаружить широкополосные сигналы, в том числе, импульсные, в системах, работающих в непересекающихся диапазонах частот, то этот способ не может быть применен. К импульсным сигналам относятся, например, сигналы гидролокаторов рыболовных траулеров. Другим примером импульсных сигналов являются удары технических устройств, работающих под водой. Таким образом, недостаток способа по патенту РФ №2730103, заключается в невозможности использования при обнаружении импульсных сигналов в системах, работающих в непересекающихся диапазонах частот.
Задачей заявляемого способа является обеспечение возможности отождествления импульсных сигналов, обнаруженных в пространственно-разнесенных системах, частотные диапазоны которых не пересекаются.
Для решения поставленной задачи в способ отождествления сигналов, обнаруженных гидроакустическими пространственно-разнесенными системами, в котором
принимают сигналы раздельно двумя системами, находящимися на общем носителе,
осуществляют в каждой системе пространственную селекцию с измерением направления на сигналы раздельно в каждой системе θ1,i и 02,j, где первый индекс определяет номер системы, а второй индекс - номер сигнала, принятого системой,
осуществляют в каждой системе частотно-временную обработку сигналов, включающую процедуры полосовой фильтрации, детектирования и интегрирования,
формируют пары сигналов ij как каждый сигнал одной системы с каждым сигналом другой системы,
принимают решение об отождествлении для пары сигналов, соответствующей критерию отождествления,
введены новые признаки, а именно:
предварительно измеряют горизонтальное расстояние L между фазовыми центрами антенн двух систем и скорость звука в воде С,
настраивают обе системы на прием импульсных сигналов, для чего при интегрировании в каждой системе выбирают время накопления, оптимальное для обнаружения сигналов заданной длительности,
фиксируют время обнаружения импульсных сигналов раздельно в каждой системе Т1,i и T2j,
формируют измеренное значение задержки обнаружения для каждой пары сигналов как Δij·=T1,i - T2,j,
для гипотезы о едином источнике каждой пары сигналов формируют прогнозное значение дальности до источника от антенны первой системы  прогнозное значение дальности до источника от антенны второй систем
прогнозное значение дальности до источника от антенны второй систем 
 и прогнозное значение задержки
и прогнозное значение задержки 
формируют математическую меру сходства между измеренным значением задержки Δij; и прогнозным значением задержки  для каждой пары ij,
для каждой пары ij,
а в качестве критерия отождествления принимают меру сходства, удовлетворяющую критерию похожести, и для пар ij импульсных сигналов, удовлетворяющих критерию похожести, принимают дальности R1,ij и R2,ij в качестве измеренных.
Техническим результатом изобретения является возможность отождествления импульсных сигналов в том случае, когда гидроакустические системы наблюдения разнесены в пространстве, и направление на сигнал не дает информации о возможном отождествлении. При этом, системы наблюдения могут иметь непересекающиеся диапазоны рабочих частот. Дополнительно, способ позволяет оценить дальность до источника импульсных сигналов, в том случае, если сигналы обнаружены в двух системах, и отождествление успешно.
Покажем возможность достижения указанного технического результата предложенным способом.
Определим условия, при которых сигнал одного источника будет обнаружен двумя гидроакустическим системами, работающими в непересекающихся диапазонах частот. Сигнал такого источника должен быть достаточно широкополосным, чтобы проявляться в обеих системах. К широкополосным сигналам относятся, в том числе, импульсные сигналы, для которых известно [Харкевич А.А. Спектры и анализ. М.: Гос. изд-во физ-мат лит-ры. 1962], что чем шире диапазон частот, тем короче длительность импульса. Обнаружение, распознавание и, в том числе, отождествление, импульсных сигналов может представлять интерес для гидроакустических систем различного назначения. При этом, импульсный сигнал характеризуется ярко выраженным передним фронтом, что дает возможность однозначно определить момент его приема. Указанное свойство импульсных сигналов может быть использовано для их отождествления.
Традиционная система гидроакустического шумопеленгования применима для обнаружения, в том числе, импульсных сигналов. Для настройки любой системы шумопеленгования на обнаружение импульсных сигналов достаточно при интегрировании, входящем с состав типовой частотно-временной обработки, выбрать время накопления, оптимальное для обнаружения сигналов заданной длительности, что и предусмотрено в процедурах заявленного способа. Кроме того, в предлагаемом способе введены операции фиксации времени обнаружения сигналов в каждой из систем. Это дает возможность измерить дополнительный параметр, а именно значение задержки обнаружения двух импульсных сигналов. Измеренное значение задержки используется далее для отождествления следующим образом.
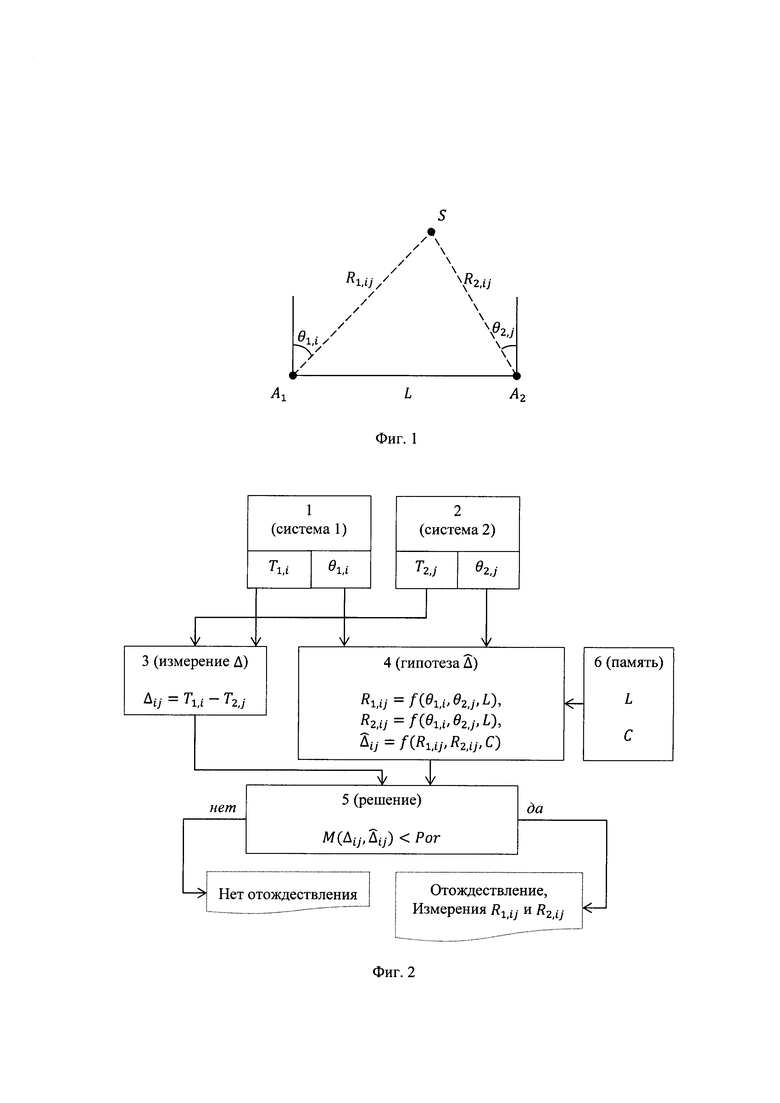
Известен триангуляционный метод определения дальности до источника сигнала [Гампер Л.Е. О точности методов пассивной гидролокации с разнесенными бортовыми антеннами // Гидроакустика. Вып. 9. СПб.: Наука. 2009. С. 34-42], основанный на приеме сигнала системой из двух разнесенных в пространстве антенн. Для реализации этого метода, основанного на геометрическом решении треугольника, образованного точками Антенна 1-Антенна 2-Источник (фиг. 1), необходимо и достаточно знать любые из трех параметров треугольника. В одном из вариантов метода известными параметрами выступают расстояние между антеннами, направление на источник, относительно первой антенны, и направление на источник, относительно второй антенны.
В нашем случае задача отождествления изначально не решена, то есть неизвестно, образуется ли треугольник Антенна 1-Антенна 2-Источник. Поэтому, триангуляционный метод [ГамперЛ.Е. О точности методов…] не может быть применен. Однако, для импульсных сигналов, как было показано ранее, дополнительно к трем параметрам, необходимым для триангуляционной задачи, может быть измерен четвертый параметр - задержка по времени между приемом сигнала на одну антенну относительно другой антенны. Это позволяет решить обратную задачу, а именно проверить, образуется ли треугольник Антенна 1-Антенна 2-Источник. Если треугольник образуется, это будет означать, что сигналы, принятые на обе антенны, принадлежат одному источнику.
Выдвигаем гипотезу, что треугольник образуется. Используя параметры расстояние между антеннами, направление на источник, относительно первой антенны, и направление на источник, относительно второй антенны, гипотетически решаем триангуляционную задачу, то есть определяем прогнозные значения дальности до источника от обеих антенн. Далее, зная скорость звука в воде, определяем прогнозные значения времен хода сигнала от источника до обеих антенн, и разность между временами хода, то есть прогнозную задержку сигнала, принятого одной антенной, относительно другой. Сравниваем прогнозное значение задержки, полученное при гипотезе, что треугольник образуется, с четвертым параметром - измеренной задержкой. Если результаты сравнения совпадут, значит, гипотеза верна, треугольник образуется, и сигналы, принятые на две антенны, принадлежат одному источнику. В этом случае, триангуляционная задача становится решенной не гипотетически, и мы получаем значение дальности до источника от обеих антенн.
Новые операции способа позволяют проверить указанную гипотезу для импульсных сигналов, и, следовательно, решить задачу отождествления в том случае, когда гидроакустические системы наблюдения разнесены в пространстве.
Сущность изобретения поясняется фигурами 1 и 2.
На фиг. 1 приведена схема взаимного расположения антенн двух систем и источника излучения в пространстве, поясняющая алгоритм работы способа. На фиг. 1 обозначено: А1 - антенна системы 1, А2 - антенна системы 2, S - предполагаемое положение источника сигнала, L - расстояние между фазовыми центрами антенн двух систем, θ1,i - направление на сигнал, измеренное в системе 1, θ2,j - направление на сигнал, измеренное в системе 2, R1,ij - дальность до источника излучения от антенны системы 1, R2,ij - дальность до источника излучения от антенны системы 2.
На фиг. 2 приведена блок-схема алгоритма реализации предлагаемого способа отождествления сигналов, обнаруженных пространственно-разнесенными системами. На фиг. 2 первый выход блока 1 (система 1) соединен с первым входом блока 3 (измерение Δ), второй выход блока 1 соединен с первым входом блока 4 (гипотеза  ). Первый выход блока 2 (система 2) соединен со вторым входом блока 3 (измерение Δ), второй выход блока 2 соединен со вторым входом блока 4 (гипотеза ).·Выходы блоков 3 и 4 соединены с первым и вторым входами блока 5 (решение). Выход блока 6 (память) соединен с третьим входом блока 4.
). Первый выход блока 2 (система 2) соединен со вторым входом блока 3 (измерение Δ), второй выход блока 2 соединен со вторым входом блока 4 (гипотеза ).·Выходы блоков 3 и 4 соединены с первым и вторым входами блока 5 (решение). Выход блока 6 (память) соединен с третьим входом блока 4.
В интегрированном гидроакустическом комплексе, состоящем из двух систем, антенны которых разнесены в пространстве, предлагаемый способ реализуется следующим образом. Если в комплексе более двух систем, разнесенных в пространстве, способ может быть реализован для каждой пары систем. До начала работы измеряют горизонтальное расстояние между фазовыми центрами антенн двух систем L и скорость звука в воде С. Расстояние L может быть измерено непосредственно в месте установки антенн или получено из габаритных чертежей носителя гидроакустического комплекса. Для измерения скорости звука в воде С используют известные косвенные или прямые методы [Комляков В.А. Корабельные средства измерения скорости звука и моделирования акустических полей в океане. СПб.: Наука. 2003]. Измеренные значения L и С сохраняют в блоке 6 (память). Настраивают частотно-временную обработку сигналов в системе 1 и системе 2 таким образом, чтобы она была оптимизирована под обнаружение импульсных сигналов. Для этого выбирают время интегрирования, согласованное с предполагаемой длительностью импульсов. Например, для гидролокаторов рыболовных траулеров длительность импульсов известна из технического описания. Для возможности обнаружения импульсов различной длительности может быть предусмотрена параллельная обработка сигналов с несколькими временами накопления.
В динамике работы система 1 и система 2 независимо друг от друга обнаруживают импульсные сигналы, фиксируют время обнаружения сигналов T1,i, T2,j и измеряют направления на них θ1,i, θ2,j раздельно в каждой системе. Операции обнаружения, обработки, измерения направления и времени обнаружения являются стандартными для систем шумопеленгования, и могут быть заимствованы из [Справочник по гидроакустике / А.П. Евтютов, А.Е. Колесников, Е.А. Корепин и др. Л.: Судостроение. 1988]. Формируют пары сигналов как каждый сигнал одной системы с каждым сигналом другой системы. Дальнейшее описание приведено для пары ij.
Измеренные в системе 1 и системе 2 времена обнаружения сигналов поступают в блок 3 (измерение Δ), в котором формируют измеренное значение задержки обнаружения пары импульсных сигналов ij как Δij·=T1,i - T2,j.
Параллельно с этим, измеренные в системе 1 и системе 2 направления на сигналы поступают в блок 4 (гипотеза ). Одновременно в блок 4 из блока 6 поступают значения L и С. В блоке 4 формируют прогнозное значение задержки  для пары ij. Для этого, выдвигают гипотезу, что сигнал i, обнаруженный в системе 1, и сигнал j обнаруженный в системе 2, принадлежат одному источнику. Тогда, взаимное расположение антенн двух систем и источника излучения в пространстве может быть представлено схемой на фиг.1, На схеме фиг.1 видно, что точки А1, А2 и S являются вершинами треугольника, в котором известными (измеренными) параметрами являются углы θ1,i, θ2,j и расстояние L. Пользуясь формулами для решения треугольников [Бронштейн И.Н., Семендяев К.А. Справочник по математике. М: гос. изд-во технико-теор. лит-ры. 1956], можно получить выражения для предполагаемой (гипотетической) дальности до источника S от антенн обеих систем А1 и А2:
для пары ij. Для этого, выдвигают гипотезу, что сигнал i, обнаруженный в системе 1, и сигнал j обнаруженный в системе 2, принадлежат одному источнику. Тогда, взаимное расположение антенн двух систем и источника излучения в пространстве может быть представлено схемой на фиг.1, На схеме фиг.1 видно, что точки А1, А2 и S являются вершинами треугольника, в котором известными (измеренными) параметрами являются углы θ1,i, θ2,j и расстояние L. Пользуясь формулами для решения треугольников [Бронштейн И.Н., Семендяев К.А. Справочник по математике. М: гос. изд-во технико-теор. лит-ры. 1956], можно получить выражения для предполагаемой (гипотетической) дальности до источника S от антенн обеих систем А1 и А2:

Тогда, зная скорость звука в среде можно определить прогнозное значение задержки между временем прихода сигнала от источника к антенне А1 и антенне А2:

Расчеты по формулам (1) и (2) реализуются в блоке 4. На схеме фиг. 2 формулы для R1,ij, R2,ij и  обозначены символом ƒ (функция).
обозначены символом ƒ (функция).
Измеренное значение задержки Δij из блока 3 и прогнозное значение задержки  из блока 4 поступают в блок 5, где осуществляется их сравнение. В качестве меры сходства может использоваться любая из известных мер сходства, например, евклидово расстояние [Ту Дж., Гонсалес Р. Принципы распознавания образов / Пер. с англ. М.: Мир. 1978]. Порог для принятия решения выбирается, например, на основании требуемой вероятности ложного отождествления согласно [Тюрин A.M. Введение в теорию статистических методов в гидроакустике. Л. 1963]. На схеме фиг. 2 вычисление меры сходства обозначено символом М. Если для пары сигналов ij, обнаруженных в двух системах выполняется условие: мера сходства между измеренным и прогнозным значением задержки менее порога
из блока 4 поступают в блок 5, где осуществляется их сравнение. В качестве меры сходства может использоваться любая из известных мер сходства, например, евклидово расстояние [Ту Дж., Гонсалес Р. Принципы распознавания образов / Пер. с англ. М.: Мир. 1978]. Порог для принятия решения выбирается, например, на основании требуемой вероятности ложного отождествления согласно [Тюрин A.M. Введение в теорию статистических методов в гидроакустике. Л. 1963]. На схеме фиг. 2 вычисление меры сходства обозначено символом М. Если для пары сигналов ij, обнаруженных в двух системах выполняется условие: мера сходства между измеренным и прогнозным значением задержки менее порога  то гипотеза о том, что эти сигналы принадлежат одному источнику, считается верной (треугольник образуется), и принимается решение об их отождествлении. Дополнительно, считаются измеренными дальности от источника сигнала до антенн обеих систем, полученные по формулам (1). В противном случае, гипотеза отклоняется, решение об отождествлении не принимается, дальности до источника сигнала считаются не измеренными.
то гипотеза о том, что эти сигналы принадлежат одному источнику, считается верной (треугольник образуется), и принимается решение об их отождествлении. Дополнительно, считаются измеренными дальности от источника сигнала до антенн обеих систем, полученные по формулам (1). В противном случае, гипотеза отклоняется, решение об отождествлении не принимается, дальности до источника сигнала считаются не измеренными.
Способ работает для каждой пары сигналов. Количество таких пар будет n×m, где n - количество сигналов в одной системе, m - количество сигналов в другой системе. В гидроакустике обычно одновременно обнаруживаются не более десяти сигналов в каждой системе. Тогда максимальное количество пар не будет превышать 100. Для каждой пары сигналов независимо повторяются операции блоков 3,4. Для каждой пары сигналов формируется своя мера схожести в блоке 5, которая сравнивается с порогом, и принимается или не принимается решение об отождествлении именно этой пары сигналов.
Все изложенное позволяет считать задачу изобретения решенной. Предложен способ отождествления сигналов, обнаруженных пространственно-разнесенными гидроакустическими системами, который может быть применен в случае, когда обнаруживаемые сигналы являются импульсными.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ отождествления объектов, обнаруженных пространственно-разнесенными системами | 2019 |
|
RU2730103C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| Способ определения координат морской шумящей цели | 2022 |
|
RU2798416C1 |
| Способ оценки дистанции до шумящего в море объекта | 2019 |
|
RU2730100C1 |
| Способ определения глубины погружения шумящего в море объекта | 2023 |
|
RU2816481C1 |
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИХ РАДИОТЕХНИЧЕСКИМ ХАРАКТЕРИСТИКАМ | 2023 |
|
RU2817619C1 |
| Способ определения полной совокупности координат морского шумящего объекта | 2023 |
|
RU2817558C1 |
| Способ определения координат источников радиосигналов с взаимно перекрывающимися спектрами | 2024 |
|
RU2834966C1 |
| Устройство получения информации о шумящем в море объекте | 2017 |
|
RU2650830C1 |
| Способ получения информации о подводном шумящем объекте | 2022 |
|
RU2803528C1 |
Способ основан на приеме, обнаружении и измерении направления гидроакустического импульсного сигнала раздельно двумя пространственно-разнесенными системами, находящимися на общем носителе. При реализации способа формируют измеренное значение задержки обнаружения двух импульсных сигналов и прогнозное значение задержки для гипотезы, что сигнал принадлежит одному источнику. Формируют математическую меру сходства между измеренным значением задержки и прогнозным значением задержки, а решение об отождествлении импульсных сигналов принимают в случае, если мера сходства удовлетворяет критерию похожести. Обеспечивается возможность отождествления импульсных сигналов в том случае, когда гидроакустические системы наблюдения разнесены в пространстве, и направление на сигнал не дает информации о возможном отождествлении. При этом системы наблюдения могут иметь непересекающиеся диапазоны рабочих частот. Дополнительно способ позволяет оценить дальность до источника импульсных сигналов в том случае, если сигналы обнаружены в двух системах и отождествление успешно. 2 ил.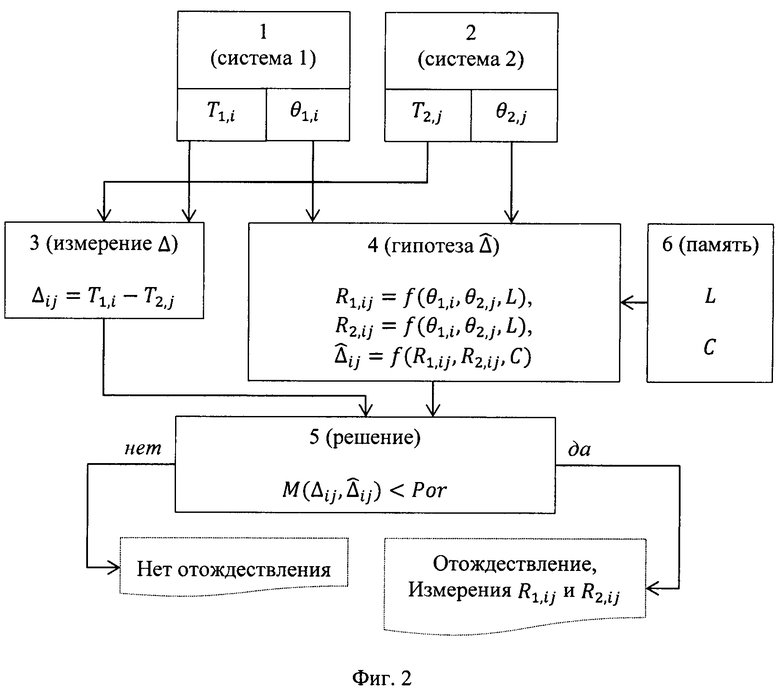
Способ отождествления сигналов, обнаруженных гидроакустическими пространственно-разнесенными системами, в котором принимают сигналы раздельно двумя системами, находящимися на общем носителе, осуществляют в каждой системе пространственную селекцию с измерением направления на сигналы раздельно в каждой системе θ1,i и θ2,j, где первый индекс определяет номер системы, а второй индекс - номер сигнала, принятого системой, осуществляют в каждой системе частотно-временную обработку сигналов, включающую процедуры полосовой фильтрации, детектирования и интегрирования, формируют пары сигналов ij как каждый сигнал одной системы с каждым сигналом другой системы, принимают решение об отождествлении для пары сигналов, соответствующей критерию отождествления, отличающийся тем, что предварительно измеряют горизонтальное расстояние L между фазовыми центрами антенн двух систем и скорость звука в воде С, настраивают обе системы на прием импульсных сигналов, для чего при интегрировании в каждой системе выбирают время накопления, оптимальное для обнаружения сигналов заданной длительности, фиксируют время обнаружения импульсных сигналов раздельно в каждой системе T1,i и T2,j, формируют измеренное значение задержки обнаружения для каждой пары сигналов как Δij=T1,i-T2,j, для гипотезы о едином источнике каждой пары сигналов формируют прогнозное значение дальности до источника от антенны первой системы 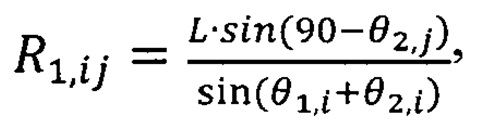 прогнозное значение дальности до источника от антенны второй системы
прогнозное значение дальности до источника от антенны второй системы 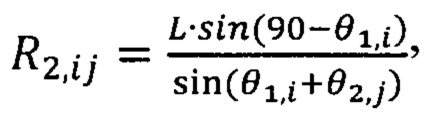 и прогнозное значение задержки
и прогнозное значение задержки  формируют математическую меру сходства
формируют математическую меру сходства  как евклидово расстояние между измеренным значением задержки Δij и прогнозным значением задержки
как евклидово расстояние между измеренным значением задержки Δij и прогнозным значением задержки  для каждой пары ij, а в качестве критерия отождествления принимают меру сходства, удовлетворяющую критерию похожести
для каждой пары ij, а в качестве критерия отождествления принимают меру сходства, удовлетворяющую критерию похожести  и для пар ij импульсных сигналов, удовлетворяющих критерию похожести, принимают дальности R1,ij и R2,ij в качестве измеренных.
и для пар ij импульсных сигналов, удовлетворяющих критерию похожести, принимают дальности R1,ij и R2,ij в качестве измеренных.
| Способ отождествления объектов, обнаруженных пространственно-разнесенными системами | 2019 |
|
RU2730103C1 |
| Способ отождествления объектов, обнаруженных несколькими системами | 2017 |
|
RU2684440C1 |
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИХ РАДИОТЕХНИЧЕСКИМ ХАРАКТЕРИСТИКАМ ДВУХПОЗИЦИОННЫМИ ПАССИВНЫМИ РАДИОЭЛЕКТРОННЫМИ СРЕДСТВАМИ | 2017 |
|
RU2656370C1 |
| US 5696736 A1, 09.12.1997 | |||
| US 7750841 B2, 06.07.2010. | |||

