Изобретение относится к области гидроакустики, может быть использовано при решении задач обработки шумового сигнала в гидроакустических системах, и предназначено для определения дальности и глубины погружения отдельных целей в том случае, когда в одном направлении могут присутствовать несколько источников шума, неразделяемых по углу наблюдения.
Известны способы [Корецкая А.С., Мельканович B.C. Патент РФ №2650830 от 28.03.2017. Устройство получения информации о шумящем в море объекте. МПК G01S 3/80, Зеленкова И.Д., Афанасьев А.Н., Корецкая А.С. Патент РФ №2740169 от 23.07.2020. Способ определения координат морской шумящей цели. МПК G01S 15/00], которые предназначены для определения координат морской шумящей цели, наблюдаемой средствами шумопеленгования в фиксированном направлении в горизонтальной плоскости. Способы основаны на сравнении параметров принятого шумового сигнала с аналогичными параметрами, рассчитанными для совокупности гипотез о возможном месте объекта в узлах сетки по дистанции и глубине для текущих гидролого-акустических условий. В первом способе в качестве сравниваемых параметров используются отношения сигнал/помеха в нескольких частотных диапазонах, а во втором - задержки по времени между моментами прихода двух лучей и совокупные интенсивности этих лучей. Решение о месте цели принимается по тому узлу сетки, для которого расчетно-прогнозируемые параметры сигнала совпадают с наблюдаемыми параметрами по заданному критерию похожести. Для получения расчетно-прогнозируемых параметров осуществляют прогнозный расчет лучевой структуры сигнала. Общим недостатком указанных способов является то, что они работают в предположении наблюдения одиночной шумящей цели. В реальной ситуации в рассматриваемом направлении в горизонтальной плоскости могут присутствовать несколько целей, находящихся на разных дистанциях и (или) глубинах погружения. Тогда принятый шумовой сигнал будет содержать смесь сигналов нескольких целей. Указанные способы не могут разделить смесь сигналов, и будут рассматривать ее как один сигнал, принятый от одиночной цели, что приведет к непредсказуемой ошибке в определении координат.
Наиболее близким аналогом по выполняемым процедурам к предлагаемому изобретению является способ [Машошин А.И., Мельканович B.C. Патент РФ №2690223 от 28.08.2018. Способ определения координат морской шумящей цели. МПК G01S 15/00].
В способе [Патент РФ №2690223] выполняются следующие основные операции:
осуществляют прогнозный расчет лучевой структуры сигнала на входе гидроакустической антенны для совокупности гипотез о возможном месте объекта в узлах сетки по дистанции и глубине, в результате которого:
формируют для каждого узла сетки по дистанции и глубине свой набор расчетных задержек каждых двух лучей,
принимают шумовой сигнал гидроакустический антенной,
вычисляют автокорреляционную функцию сигнала,
обнаруживают в автокорреляционной функции локальные максимумы, и
формируют из них набор измеренных задержек каждых двух лучей,
принимают решение о дистанции и глубине погружения объекта путем выбора того узла сетки по дистанции и глубине для которого получено наибольшее совпадение между наборами расчетных и измеренных задержек.
Способ основан на анализе автокорреляционной функции принятого сигнала, которая содержит в своих локальных максимумах информацию о параметрах сигнала. Аргумент локального максимума, то есть координата по оси абсцисс, представляет собой задержку по времени между моментами прихода двух лучей. Сравнение измеренных задержек каждых двух лучей в принятом сигнале с задержками прогнозных лучей, рассчитанными в текущих гидролого-акустических условиях для совокупности гипотез о возможном месте объекта в узлах сетки по дистанции и глубине, позволяет определить дистанцию и глубину цели.
Недостаток указанного способа аналогичен недостатку других способов определения координат шумящей цели. В случае наличия не одной, а нескольких целей, находящихся на разных дистанциях и (или) глубинах погружения, их шумовые сигналы будут приняты антенной вместе в виде неразделимой смеси. Тогда набор измеренных задержек будет содержать несколько групп задержек, принадлежащих разным целям. Способ-прототип не позволяет разделить эти группы задержек, и будет работать со всем набором задержек, как если бы он принадлежал одной цели, что неверно. Это приведет к непредсказуемой ошибке в определении координат.
Задача изобретения - создать способ определения координат морской шумящей цели, работоспособный в случае, когда в одном направлении могут присутствовать несколько источников шума, неразделяемых по углу наблюдения.
Для решения поставленной задачи в способ определения координат морской шумящей цели, в котором осуществляют прогнозный расчет лучевой структуры сигнала на входе гидроакустической антенны, формируют для каждого узла сетки по дистанции и глубине свой набор расчетных задержек каждых двух лучей, принимают шумовой сигнал гидроакустический антенной, вычисляют автокорреляционную функцию сигнала, обнаруживают в автокорреляционной функции локальные максимумы, и формируют из них набор из m штук измеренных задержек τij каждых двух лучей i и j, принимают решение о дистанции и глубине погружения морской шумящей цели путем выбора определенного узла сетки по дистанции и глубине,
введены новые признаки, а именно:
при формировании набора измеренных задержек измеряют количество лучей  возможное для одиночной цели,
возможное для одиночной цели,
разделяют набор измеренных задержек на отдельные группы задержек, циклически повторяя процесс разделения до тех пор, пока все задержки не разделятся на группы, удовлетворяющие совокупности тождеств: 
где n - количество лучей одиночной цели,
а решение о дистанции и глубине погружения каждой одиночной цели принимают отдельно с использованием своей группы задержек, путем выбора того узла сетки по дистанции и глубине, для которого получено наибольшее совпадение между набором расчетных задержек и группой измеренных задержек.
Техническим результатом изобретения является разделение параметров сигнала, на основании которых осуществляется определение координат, на отдельные группы, принадлежащие разным целям. Это позволит применять предлагаемый способ в условиях, когда в одном направлении может присутствовать неизвестное количество целей. При этом способ определяет координаты по каждой из одиночных целей, сигналы которых смешались.
Покажем возможность достижения указанного технического результата.
Рассмотрим распространение звука в морской среде от источника сигнала к приемнику. В горизонтальной плоскости звуковой сигнал распространяется прямолинейно, а в вертикальной плоскости - претерпевает рефракцию, то есть его путь искривляется. Это связано в морской среде с непостоянством скорости распространения звука на разных глубинах. В рамках лучевой теории [Бреховских Л.М., Лысанов Ю.П. Теоретические основы акустики океана. М.: Наука. 2007] это объясняется через понятие лучевой трубки (или кратко луча). Под лучом понимают звуковой сигнал, выходящий из источника и проходящий на некотором удалении от него через произвольно малый контур. В рамках лучевой теории считают, что звуковая энергия «течет» по совокупности лучевых трубок (лучей), не пресекая их стенок. Из источника сигнала в сторону приемника выходит бесконечное множество лучей в вертикальной плоскости под углами от +90° вверх до -90° вниз относительно горизонтальной плоскости. Каждый из этих лучей распространяется по своей уникальной траектории, претерпевая полные внутренние отражения и (или) отражаясь от дна или поверхности.
Несмотря на то, что из источника выходит бесконечное множество лучей, не все из них достигают приемника, находящегося в фиксированной точке по глубине и дальности. Многие из лучей теряют большую долю своей интенсивности при отражениях от поверхности и дна, а другие имеют такую траекторию, которая для фиксированного расстояния до приемника проходит ниже или выше глубины его погружения. Таким образом, одиночный источник и приемник, как фиксированные точки связывает между собой ограниченное количество лучей. Другой источник, находящийся на другой дальности или глубине, связывает с тем же приемником, в общем случае, другое количество других лучей.
Каждый луч характеризуется своей уникальной траекторией и временем распространения звука вдоль луча. Лучи достигают антенны не одновременно, а с некоторой задержкой, равной разности между временами распространения звука вдоль отдельных лучей. Первым достигает антенны самый быстрый луч, затем второй, третий, и т.д. Определить полное время распространения звука по лучу путем анализа принятого сигнала не представляется возможным. Однако анализ автокорреляционной функции сигнала позволяет определить задержки по времени между моментами прихода каждых двух лучей. Сравнение совокупности измеренных задержек с прогнозными задержками, рассчитанными для узлов сетки по дистанции и глубине возможного положения цели, позволяет определить координаты шумящей цели.
Если источник и приемник связаны между собой одним лучом, то количество задержек будет равно нулю. Если лучей два, то между ними будет всего одна задержка, которая и должна быть обнаружена в автокорреляционной функции. Если лучей три, то естественно получим три задержки по одной для каждой пары лучей: между первым и вторым, между первым и третьим, между вторым и третьим. Можно показать, что, в общем случае, количество задержек М определяется количеством лучей n следующим образом:

Примеры численных значений количества задержек в зависимости от количества лучей приведены в таблице 1. Видно, что количество задержек не может быть любым натуральным числом, а принадлежит некоторому фиксированному ряду чисел. Следовательно, если измеренное количество задержек m не принадлежит указанному ряду М, то уже понятно, что измеренный набор задержек принадлежит более чем одной цели.

Кроме того, значения задержек, принадлежащих одной цели, обладают известной взаимосвязью. Это логически объясняется тем, что измеряются задержки каждой пары лучей, входящих в полную группу лучей, как каждый луч с каждым. Например, для трех лучей имеем три задержки, для которых сумма задержки между первым и вторым лучом и задержки между вторым и третьим лучом равна задержке между первым и третьим лучом. Можно показать, что в общем случае, для n лучей выполняются k тождеств:
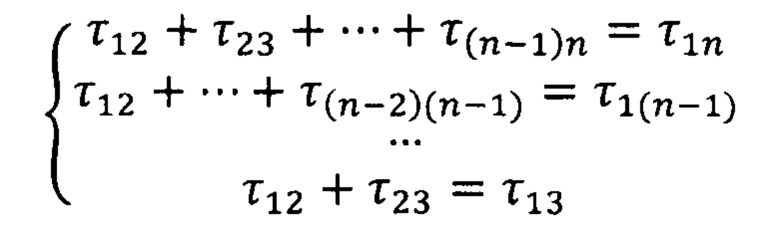
где k=(n-1)(n-2)/2 - количество тождеств,
n - количество лучей,
τij - задержка по времени между моментом прихода луча i и луча j.
Для справки в таблице 1 приведено количество тождеств, которое должно выполняться для группы задержек, принадлежащих одной цели.
Тогда, для разделения набора измеренных задержек на группы, принадлежащие разным одиночным целям, необходимо из всего набора, путем перебора, выделять группы по М задержек, для которых выполняется совокупность из k тождеств, приведенная выше. Для определения возможного количества задержек одиночной цели М и составления соответствующего ему количества тождеств k первоначально необходимо определить возможное количество лучей n для известного принятого набора задержек в количестве m≥М. Решая квадратное неравенство n(n-1)/2≤m относительно неизвестного n, получим:

где m - измеренное количество задержек, такое что М≤m,
int{x} - целое значение числа х.
Полученное выражение позволяет измерить в принятом сигнале максимально возможное количество лучей, которые образовали группу измеренных задержек от одиночной цели. Именно количество лучей определяет параметры группы задержек для одиночной цели: количество задержек и взаимосвязь между задержками в группе (см. таблицу 1). Поэтому первой новой процедурой способа является измерение количества лучей, на основании которого далее производится поиск взаимосвязи между задержками в группе.
Новые процедуры способа, используя полученные соотношения, позволяют разделять набор принятых задержек на группы, принадлежащие разным целям, и применять способ в условиях, когда в одном направлении может присутствовать неизвестное количество целей. Тогда предлагаемый способ определяет координаты по каждой из одиночных целей, сигналы которых смешались.
Сущность изобретения поясняется фиг. 1, на которой изображена укрупненная блок-схема устройства, реализующего предлагаемый способ. Структурная схема включает последовательно соединенные блоки: Антенна 1, блок 2 вычисления автокорреляционной функции сигнала (АКФ), блок 3 определения задержек по времени прихода между лучами и формирования групп задержек, принадлежащих разным одиночным целям (ГрЗД), блок 4 определения дистанции и глубины погружения для каждой одиночной цели (ДиГЛ). Второй вход блока 4 соединен с выходом блока 5 гидролого-акустических расчетов (ГАР).
С помощью аппаратуры (фиг. 1) способ реализуется следующим образом.
Антенна 1 принимает шумовой сигнал с фиксированного горизонтального направления. При этом шумовой сигнал может содержать в своем составе смесь сигналов нескольких морских целей, находящихся на разных дистанциях и(или) глубинах погружения. Устройство антенны и процедуры приема шумового сигнала известны, например, из [Справочник по гидроакустике / А.П. Евтютов, А.Е. Колесников, Е.А. Корепин и др. - 2-е изд., перераб. и доп. - Л.: Судостроение. 1988. 552 с.]. Шумовой сигнал поступает в блок 2.
В блоке 2 АКФ осуществляется вычисление автокорреляционной функции шумового сигнала [Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. Пер. с англ. М.: Мир, 1978], которая поступает в блок 3.
В блоке 3 ГрЗД осуществляется обнаружение совокупности локальных максимумов в текущей автокорреляционной функции, которые сохраняется в виде массива  , где X - абсцисса, то есть задержка по времени между моментами прихода двух лучей,
, где X - абсцисса, то есть задержка по времени между моментами прихода двух лучей,  - номера локальных максимумов, из которых образуется набор из m задержек. Обнаружение локальных максимумов может быть реализовано на основании алгоритма обнаружения аномальных выбросов случайного процесса [Тейлор Дж. Введение в теорию ошибок. Пер. с англ. М.: Мир, 1985] Затем в блоке 3 выполняется итерационный логический алгоритм разделения набора задержек на группы, принадлежащие отдельным одиночным целям. Алгоритм состоит из следующих шагов:
- номера локальных максимумов, из которых образуется набор из m задержек. Обнаружение локальных максимумов может быть реализовано на основании алгоритма обнаружения аномальных выбросов случайного процесса [Тейлор Дж. Введение в теорию ошибок. Пер. с англ. М.: Мир, 1985] Затем в блоке 3 выполняется итерационный логический алгоритм разделения набора задержек на группы, принадлежащие отдельным одиночным целям. Алгоритм состоит из следующих шагов:
На первом шаге измеряют максимально возможное количество лучей n одиночной цели в принятом сигнале. Для этого используется формула:

где m - количество задержек в принятом сигнале.
Например, если количество задержек m в принятом сигнале от 10 до 14, то получаем максимально возможное количество лучей одной цели n=5. При этом теоретически возможное количество задержек М от 5 лучей равно М=n(n-1)/2=10. Это значит, что если задержек в принятом сигнале более 10, то наблюдаемый шумовой сигнал, безусловно, содержит смесь сигналов от разных целей.
На втором шаге перебирают задержки из массива таким образом, чтобы найти группу из М задержек (М≤m), которые удовлетворяют совокупности тождеств для n лучей:

Например, если получено максимально возможное количество лучей n=5, то перебирют все возможные группы задержек по М=10 штук, составляя верную систему из k=(n-1)(n-2)/2=6 тождеств:

Если группа таких задержек для n лучей найдена, то значения задержек в группе для  передаются в блок 4 как принадлежащие одной цели. Остальные задержки из исходного набора m, которые не попали в группу М, возвращают на первый шаг алгоритма как исходный набор из (m-М) штук задержек.
передаются в блок 4 как принадлежащие одной цели. Остальные задержки из исходного набора m, которые не попали в группу М, возвращают на первый шаг алгоритма как исходный набор из (m-М) штук задержек.
Например, для задержек при  может быть составлена такая система тождеств:
может быть составлена такая система тождеств:

Видно, что в систему попала группа из М=10 задержек, которые передаются в блок 4. Остальные четыре задержки Х11, Х12, Х13, Х14 возвращаются на первый шаг алгоритма.
Если группа задержек, удовлетворяющих совокупности тождеств для n лучей не найдена, то уменьшают возможное количество лучей одной цели до (n-1), и возвращают все задержки на второй шаг алгоритма.
Циклически выполняют последовательность шагов алгоритма до тех пор, пока все задержки не разделятся на группы. При этом минимальная группа содержит одну задержку, что соответствует двум лучам.
Полученные группы задержек поступают в блок 4. Одновременно в блок 4 из блока 5 ГАР поступают наборы расчетных задержек, полученные в узлах сетки по дистанции и глубине. Для получения расчетных значений задержек осуществляют построение лучевой структуры сигнала на входе гидроакустической антенны, используя, например, программу, описанную в [Авилов К.В., Добряков Н.А., Попов О.Е. Комплекс программных средств для вычисления звуковых полей в морской среде, неоднородной по глубине и трассе распространения // Акустика океана. Доклады X школы-семинара акад. Л.М. Бреховских. М.: ГЕОС, 2004. С. 27]. В блоке 4 принимается решение о дистанции и глубине погружения для каждой одиночной цели, которой соответствует своя группа измеренных задержек. Для этого выбирают тот узел по дистанции и глубине погружения, для которого получено наибольшее совпадение между набором расчетных задержек и группой измеренных задержек. Совпадение между наборами расчетных задержек и группой измеренных задержек можно определять по способу [Патент РФ №2690223], когда в качестве критерия похожести выбирается наибольшее количество равенств задержек с учетом точности их измерения.
Все изложенное позволяет считать задачу изобретения решенной. Предложен способ определения координат морской шумящей цели, предназначенный для определения дистанции и глубины погружения отдельных целей в том случае, когда в одном направлении могут присутствовать несколько источников шума, неразделяемых по углу наблюдения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ получения информации о подводном шумящем объекте | 2022 |
|
RU2803528C1 |
| Способ распознавания гидроакустических шумов морских объектов | 2023 |
|
RU2841513C2 |
| Способ определения глубины погружения шумящего в море объекта | 2023 |
|
RU2816481C1 |
| Способ локализации в пространстве шумящего в море объекта | 2023 |
|
RU2816480C1 |
| Способ локализации в пространстве шумящего в море объекта | 2022 |
|
RU2788341C1 |
| Способы определения координат морской шумящей цели | 2022 |
|
RU2797161C1 |
| Способ пассивного определения координат шумящего объекта | 2022 |
|
RU2798390C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩИХ МОРСКИХ ОБЪЕКТОВ | 2022 |
|
RU2810106C2 |
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2015 |
|
RU2602732C1 |
| Способ пассивного определения координат шумящего в море объекта | 2022 |
|
RU2797780C1 |

Использование: изобретение относится к области гидроакустики и предназначено для определения дистанции и глубины погружения отдельных целей в том случае, когда в одном направлении могут присутствовать несколько источников шума, неразделяемых по углу наблюдения. Сущность: способ основан на приеме гидроакустического шумового сигнала гидроакустической антенной, вычислении автокорреляционной функции сигнала с последующим определением набора задержек по времени между парными лучами, и определении дистанции и глубины погружения наблюдаемой цели на основании анализа задержек. При реализации способа разделяют набор измеренных задержек на группы, принадлежащие отдельным одиночным целям. Технический результат: возможность применения заявленного способа в условиях, когда в одном направлении может присутствовать неизвестное количество целей. При этом способ определяет координаты по каждой из одиночных целей, сигналы которых смешались. 1 ил., 1 табл.
Способ определения координат морской шумящей цели, в котором осуществляют прогнозный расчет лучевой структуры сигнала на входе гидроакустической антенны, формируют для каждого узла сетки по дистанции и глубине свой набор расчетных задержек каждых двух лучей, принимают шумовой сигнал гидроакустический антенной, вычисляют автокорреляционную функцию сигнала, обнаруживают в автокорреляционной функции локальные максимумы, и формируют из них набор из m штук измеренных задержек τij каждых двух лучей i и j, принимают решение о дистанции и глубине погружения морской шумящей цели путем выбора определенного узла сетки по дистанции и глубине, отличающийся тем, что при формировании набора измеренных задержек измеряют количество лучей  возможное для одиночной цели, разделяют набор измеренных задержек на отдельные группы задержек, циклически повторяя процесс разделения до тех пор, пока все задержки не разделятся на группы, удовлетворяющие совокупности тождеств:
возможное для одиночной цели, разделяют набор измеренных задержек на отдельные группы задержек, циклически повторяя процесс разделения до тех пор, пока все задержки не разделятся на группы, удовлетворяющие совокупности тождеств: 
где n - количество лучей одиночной цели, а решение о дистанции и глубине погружения каждой одиночной цели принимают отдельно с использованием своей группы задержек, путем выбора того узла сетки по дистанции и глубине, для которого получено наибольшее совпадение между набором расчетных задержек и группой измеренных задержек.
| Способ определения координат морской шумящей цели | 2018 |
|
RU2690223C1 |
| СПОСОБ СОВМЕСТНОЙ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА И ЕГО ШУМНОСТИ | 2014 |
|
RU2548400C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ НЕПОДВИЖНОГО ОБЪЕКТА | 2015 |
|
RU2590932C1 |
| Способ определения координат морской шумящей цели | 2019 |
|
RU2724962C1 |
| Способ определения координат морской шумящей цели | 2020 |
|
RU2740169C1 |
| Способ определения координат подводного объекта в переходной зоне шельф - глубокое море | 2021 |
|
RU2752018C1 |
| Способ определения параметров цели гидролокатором | 2017 |
|
RU2650835C1 |
| CN 113108778 A, 13.07.2021. | |||
