Изобретение относится к области гидроакустики и предназначено для отождествления объектов, обнаруженных разными гидроакустическими системами, находящимися на общем носителе, антенны которых разнесены в пространстве.
Задача интеграции гидроакустических систем обнаружения и отождествления объектов, обнаруженных несколькими системами, всегда ставилась разработчиками аппаратуры [1]. Системы, работающие в разных диапазонах частот, имеющие различные приемные антенны и (или) способы обработки информации, оптимизированы под обнаружение различных частей единого гидроакустического сигнала. Следовательно, отождествление объектов, обнаруженных этими системами, позволит получить наиболее полную информацию о шумящем в море объекте.
Известны способы отождествления [2, 3, 4], согласно которым на основании совокупности общих оценок параметров производится отождествление формуляров объектов, обнаруженных в разных системах. Эти способы разработаны для случаев отождествления объектов, обнаруженных в сходных системах, и обладающих представительным набором общих параметров. Теоретический анализ показывает высокую эффективность этих способов отождествления. Однако на практике, при интеграции сильно разнородных систем, перечень общих параметров в формулярах разных систем ограничен, и часто состоит из одного параметра - направления на цель. Это приводит к общему недостатку способов отождествления, который заключается в их низкой эффективности на практике.
Наиболее близким аналогом по решаемым задачам и используемым принципам работы к предлагаемому изобретению является способ отождествления объектов, обнаруженных несколькими системами [5], который принят за прототип. В соответствии со способом-прототипом принимают сигналы объектов раздельно двумя системами, находящимися на общем носителе, измеряют направления на объекты раздельно в каждой системе, формируют пары объектов как каждый объект одной системы с каждым объектом другой системы, формируют значения разности между направлениями на объект для каждой пары объектов, и для тех пар объектов, для которых разность направлений меньше пороговой, принимают решение об отождествлении объектов. Способ осуществляет отождествление объектов на основании направления на объект. Именно в этом заключается недостаток способа, который проявляется в случае, когда системы разнесены в пространстве. Рассмотрим, например, систему с антенной, установленной в носовой оконечности носителя, и систему с буксируемой антенной. Расстояние между фазовыми центрами этих антенн измеряется сотнями метров и может достигать километра. Тогда направления на один объект, измеренные из разных точек пространства не будут совпадать. Можно показать, что разность между измеренными направлениями изменяется от нуля (на больших расстояниях) до десятков градусов (на близких расстояниях и траверсных углах). Таким образом, способ [5] не может быть использован для отождествления объектов, обнаруженных в пространственно-разнесенных системах.
Задачей заявляемого способа является обеспечение возможности отождествления объектов, обнаруженных в пространственно-разнесенных системах, находящихся на общем носителе.
Для решения поставленной задачи в способ отождествления объектов, обнаруженных пространственно-разнесенными системами, в котором
принимают сигналы объектов раздельно двумя системами, находящимися на общем носителе,
формируют пары объектов как каждый объект одной системы с каждым объектом другой системы, введены новые признаки, а именно:
выбирают частотный диапазон, общий для обеих систем, опорную частоту дискретизации и общую длину выборки,
фильтруют сигналы каждого объекта в обеих системах полосовым фильтром с полосой пропускания, равной выбранному частотному диапазону,
осуществляют дискретизацию сигналов каждого объекта с выбранной опорной частотой,
формируют массивы измерений для сигналов каждого объекта, накапливая количество отсчетов сигнала, равное общей длине выборки,
вычисляют взаимно-корреляционную функцию между массивами измерений для каждой пары объектов,
находят максимальное значение взаимно-корреляционной функции для каждой пары,
принимают решение об отождествлении для пар объектов, для которых выполняется условие: максимальное значение взаимно-корреляционной функции более порога.
Техническим результатом изобретения является возможность отождествления объектов в том случае, когда гидроакустические системы наблюдения разнесены в пространстве, и направление на объект не дает информации о возможном отождествлении.
Покажем возможность достижения указанного технического результата предложенным способом.
Известно [6], что для решения некоторых радиотехнических задач применяются многоканальные системы. При воздействии на вход такой системы флуктуационного шума от одного и того же источника выходные напряжения соседних каналов будут коррелированы, если частотные характеристики этих каналов перекрываются. Для оценки степени корреляции используют взаимно-корреляционную функцию между выходными напряжениями соседних каналов.
Указанное свойство сохранения корреляции между сигналами от одного источника распространяющимися по разным путям и способ оценки степени корреляции применимы и в рассматриваемом случае для отождествления объектов, обнаруженных разными гидроакустическими системами. В море находится объект, который излучает шумовой сигнал. Этот сигнал распространятся в водной среде к обеим антеннам по разным путям, однако условия распространения сигнала одинаковы, частотная передаточная характеристика среды общая для обоих путей распространения. Следовательно, корреляция между сигналами, принимаемыми разными антеннами сохраняется. Далее способы обработки информации в разных системах могут отличаться в связи с тем, что различные системы оптимизированы под обнаружение различных частей единого гидроакустического сигнала. Поэтому для сохранения корреляции между сигналами в предлагаемом способе предусмотрены процедуры приведения сигналов обеих систем к единому частотному диапазону. К таким процедурам относятся полосовая фильтрация и приведение сигналов к единой частоте дискретизации. При этом необходимо отметить, что корреляция может быть сохранена только в случае, если сравниваемые системы работают в перекрывающемся диапазоне частот. Далее вычисляется взаимно-корреляционная функция между подготовленными сигналами обеих систем, на основании которой принимается решение, обладают ли сигналы корреляцией. Если сигналы коррелированы между собой, значит их источником является один объект, и, следовательно, принимается решение об отождествлении объектов, обнаруженных в двух системах.
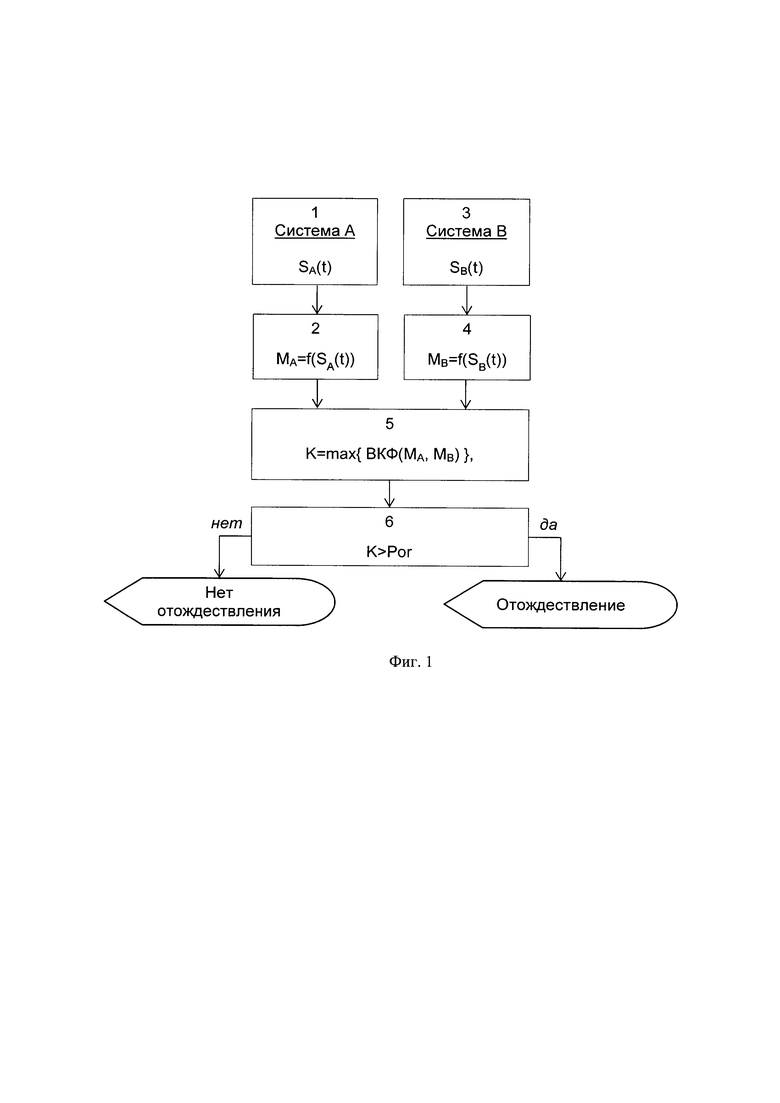
Сущность изобретения поясняется фиг. 1, на которой приведена блок-схема устройства, реализующего предлагаемый способ отождествления объектов, обнаруженных пространственно-разнесенными системами. Для того, чтобы не перегружать схему, она приведена для случая обнаружения по одному объекту в каждой системе. Эти объекты образуют пару. Описание других случаев приведено в тексте.
На фиг. 1 выход блока 1 (Система А) соединен с входом блока 2 частотной обработки сигнала системы А, а выход блока 3 (Система В) соединен с входом блока 4 частотной обработки сигнала системы В. Выход блока 2 и выход блока 4 соединены с первым и вторым входами блока 5, в котором осуществляется взаимная обработка информации двух систем: определение взаимно-корреляционной функции и ее максимального значения. Выход блока 5 соединен с входом блока 6, в котором реализуется сравнение с порогом (Por) и принятие решения.
В интегрированном гидроакустическом комплексе, состоящем из двух систем, антенны которых разнесены в пространстве, предлагаемый способ реализуется следующим образом. До начала работы выбирают частотный диапазон, опорную частоту дискретизации и общую длину выборки. Частотный диапазон должен быть выбран таким образом, чтобы он был общим для способов обработки информации в обеих системах. Если системы работают в неперекрывающихся диапазонах частот, то способ отождествления не может быть реализован. Опорную частоту дискретизации выбирают на основании теоремы Котельникова [7]. Длину выборки выбирают с учетом дальности работы систем и времени распространения сигнала в среде. Необходимо, чтобы длина выборки по времени была как минимум в два раза больше максимально возможной задержки между временем распространением сигнала к антенне одной системы и временем распространения сигнала к антенне другой системы. В этом случае взаимно-корреляционная функция между сигналами, распространяющимися по самому короткому и самому длинному путям, будет оценена корректно [7].
В динамике работы система А (блок 1) и система В (блок 3) независимо друг от друга принимают сигналы объекта SA(t) и SB(t). Сигнал SA(t) системы А поступает в блок 2, а сигнал SB(t) системы В поступает в блок 4, в которых для них реализуются одинаковые процедуры: полосовая фильтрация в выбранном частотном диапазоне, дискретизация с выбранной опорной частотой, формирование массива измерений. Эти процедуры являются стандартными, и могут быть заимствованы из [7]. На схеме фиг. 1 совокупность указанных процедур обозначена символом f (функция).
Далее обработанный сигнал МA системы А и обработанный сигнал МB системы В поступают в блок 5, в котором осуществляется взаимная обработка информации двух систем: вычисляется взаимно-корреляционная функция между обработанными сигналами ВКФ(МA, MB) и определяется максимальное значение взаимно-корреляционной функции K=max {ВКФ(МA, MB)}. Процедура вычисления взаимно-корреляционной функции известна из [7].
Далее максимальное значение взаимно-корреляционной функции K поступает в блок 6, в котором производится его сравнение с порогом. Порог Por выбирается по правилу обнаружения аномальных выбросов в выборке значений нормально распределенной случайной величины [8]. В случае, когда для рассматриваемой пары объектов выполняется условие: максимальное значение взаимно-корреляционной функции более порога K>Рог, принимается решение об отождествлении объектов, обнаруженных системами А и В. В противном случае решение об отождествлении не принимается.
В случае, если в системе А и (или) в системе В приняты сигналы более чем одного объекта, формируются пары объектов как каждый объект системы А с каждым объектом системы В. Количество таких пар будет n×m, где n - количество объектов в одной системе, m - количество объектов в другой системе. В гидроакустике обычно одновременно обнаруживаются не более десяти объектов в каждой системе. Тогда максимальное количество пар не будет превышать 100. Для каждой пары объектов независимо повторяются процедуры блоков 5,6. Для каждой пары объектов формируется своя взаимно-корреляционная функция и ее максимальное значение. Максимальное значение взаимно-корреляционной функции сравнивается с порогом, и принимается или не принимается решение об отождествлении именно этой пары объектов.
Все изложенное позволяет считать задачу изобретения решенной. Предложен способ отождествления объектов, обнаруженных несколькими гидроакустическими системами, который может быть применен в случае, когда системы разнесены в пространстве.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Андреев М.Я., Охрименко С.Н., Клюшин В.В., Рубанов И.Л., Яковлев В.А. Интегрированная система подводного наблюдения для надводного корабля // Морской сборник. 2006. №8. С. 50-51.
2. Нерославский Б.Л., Щеголева Н.Л. Об идентификации трассовых обнаружителей при многоканальном пеленговании // Гидроакустика. 2000. №2. С. 65-69.
3. Жандаров A.M. Идентификация и фильтрация измерений состояния стохастических систем. М.: Наука. 1979.
4. Шейнман Е.Л. Алгоритмы оценки эффективности идентификации сигналов в многоканальной информационной системе // Гидроакустика. 2006. №6. С. 44-48.
5. Волкова А.А., Никулин М.Н. Способ отождествления объектов, обнаруженных несколькими системами. Патент РФ №2684440 от 09.04.2019. МПК G01S 3/80.
6. Тихонов В.И. Статистическая радиотехника. М.: Советское радио. 1966.
7. Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов // Пер. с англ. М.: Мир. 1978.
8. Тейлор Дж. Введение в теорию ошибок. М.: Мир, 1985.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ отождествления сигналов, обнаруженных гидроакустическими пространственно-разнесенными системами | 2021 |
|
RU2778168C1 |
| Способ обработки шумового сигнала объекта, обнаруженного гидроакустическими пространственно-разнесенными системами | 2022 |
|
RU2787686C1 |
| Способ адаптивного обнаружения морского шумящего объекта | 2023 |
|
RU2809016C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| Способ обнаружения локального объекта на фоне распределенной помехи | 2021 |
|
RU2772110C1 |
| Способ отождествления объектов, обнаруженных несколькими системами | 2017 |
|
RU2684440C1 |
| Способ локализации в пространстве шумящего в море объекта | 2023 |
|
RU2816480C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАНЕВРА ШУМЯЩЕГО ОБЪЕКТА | 2016 |
|
RU2634786C1 |
| Способ пассивного определения координат шумящего в море объекта | 2021 |
|
RU2764386C1 |
| Способ обработки псевдошумового сигнала в гидролокации | 2020 |
|
RU2739478C1 |
Изобретение относится к области гидроакустики и предназначено для отождествления объектов, обнаруженных разными гидроакустическими системами, находящимися на общем носителе, антенны которых разнесены в пространстве. Способ основан на приеме акустического сигнала объекта раздельно двумя системами, находящимися на общем носителе. При реализации способа вычисляют взаимно-корреляционную функцию между измеренными сигналами для каждой пары объектов. Для этого предварительно фильтруют сигналы каждого объекта в обеих системах полосовым фильтром с полосой пропускания, равной частотному диапазону, общему для обеих систем. Принимают решение об отождествлении для пар объектов в случае выполнения условия: максимальное значение взаимно-корреляционной функции между сигналами этих пар более порога. Техническим результатом изобретения является возможность отождествления объектов в том случае, когда гидроакустические системы наблюдения разнесены в пространстве, и направление на объект не дает информации о возможном отождествлении. 1 ил.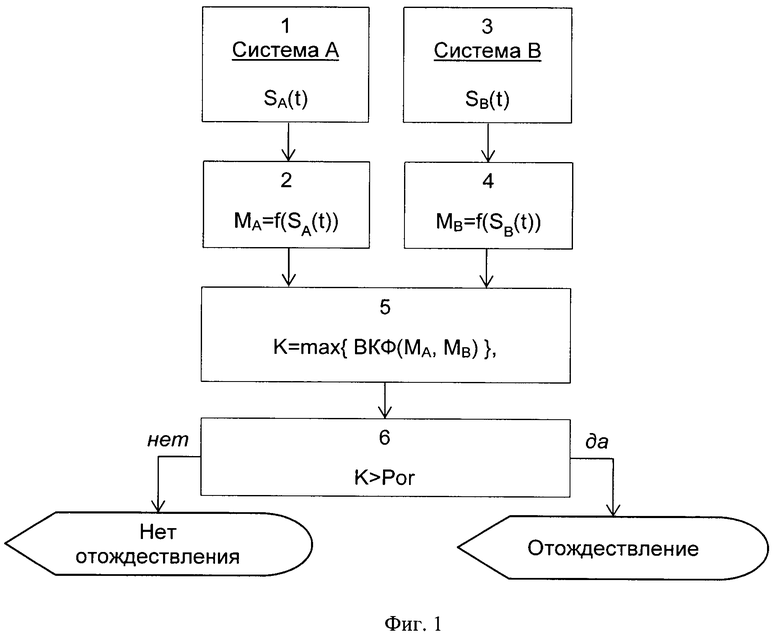
Способ отождествления объектов, обнаруженных гидроакустическими пространственно-разнесенными системами, в котором принимают сигналы объектов раздельно двумя системами, находящимися на общем носителе, и формируют пары объектов как каждый объект одной системы с каждым объектом другой системы, отличающийся тем, что выбирают частотный диапазон, общий для обеих систем, опорную частоту дискретизации и общую длину выборки, фильтруют сигналы каждого объекта в обеих системах полосовым фильтром с полосой пропускания, равной выбранному частотному диапазону, осуществляют дискретизацию сигналов каждого объекта с выбранной опорной частотой, формируют массивы измерений для сигналов каждого объекта, накапливая количество отсчетов сигнала, равное общей длине выборки, вычисляют взаимно-корреляционную функцию между массивами измерений для каждой пары объектов, находят максимальное значение взаимно-корреляционной функции для каждой пары, принимают решение об отождествлении для пар объектов, для которых выполняется условие: максимальное значение взаимно-корреляционной функции более порога.
| Способ отождествления объектов, обнаруженных несколькими системами | 2017 |
|
RU2684440C1 |
| Устройство получения информации о шумящем в море объекте | 2017 |
|
RU2654365C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ГИДРОАКУСТИЧЕСКИЙ МАЯК-ОТВЕТЧИК В УСЛОВИЯХ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ НАВИГАЦИОННОГО СИГНАЛА | 2012 |
|
RU2515179C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| Синусно-косинусный вращающийся трансформатор | 1989 |
|
SU1690108A1 |

