Изобретение относится к области гидроакустики, может быть использовано при решении задач обработки сигнала в пассивной гидролокации, и предназначено для совместной оценки направления, дальности и глубины погружения морского шумящего объекта с использованием горизонтальной линейной многоэлементной приемной антенны в ближнем акустическом поле.
Ближним полем антенны называется [Терминологический словарь-справочник по гидроакустике / Р.Х. Бальян, Э.В. Батаногов, А.В. Богородский и др. - Л.: Судостроение, 1989] область пространства, непосредственно прилежащая к апертуре антенны, ограниченная расстоянием:

где D - размер антенны, λ - длина волны.
Внутри ближнего поля принимаемый сигнал имеет уникальную пространственно-временную структуру.
Для ближнего поля известны способы, позволяющие определять координаты шумящего объекта [Thubert Dominique, inventor; Thomson CSF, assignee. Passive sound telemetry method. United States patent US 4,910,719. 1990 Mar 20; Гампер Л.Е., Попова O.C.; Акционерное общество «Концерн «Океанприбор». Способ пассивного определения координат источников гидроакустического излучения. Патент №2680860 РФ, МПК G01S 3/80. №2017142855; Заявл. 07.12.2017; Опубл. 28.02.2019, Бюл. №7], или способ, описанный в книге [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. Состояние и актуальные проблемы. - СПб.: Наука. - 2004. - С. 66-68]. Указанные способы основаны на анализе структуры ближнего поля, а именно на анализе кривизны волнового фронта, для выявления которого используют несколько горизонтально расположенных антенн, и вычисляют взаимно-корреляционные функции сигналов. Для этих способов характерно одновременное определение направления на объект и дальности до объекта. Недостатком этих и других способов для ближнего поля антенны является отсутствие возможности определения глубины погружения шумящего объекта.
Известен способ [Волкова А.А., Консон А.Д., Мнацаканян А.А.; Акционерное общество «Концерн «Океанприбор». Способ пассивного определения координат шумящего объекта. Патент №2798390 РФ, МПК G01S 3/80. №2022123376; Заявл. 31.08.2022; Опубл. 22.06.2023, Бюл.№18] в котором предложено определение дальности и глубины погружения объекта для горизонтально расположенной приемной гидроакустической системы. Если этот способ произвести совместно со способом [Гампер Л.Е., Ермоленко А.С., Манов К.В.; Открытое акционерное общество «Концерн «Океанприбор». Способ пассивного определения координат источников излучения. Патент №2507531 РФ, МПК G01S 3/80. №2012147666/07; Заявл. 08.11.2012; Опубл. 20.02.2014, Бюл. №5], как предложено в описании к патенту №2798390, тогда возможно получение совместной оценки направления, дальности и глубины погружения морского шумящего объекта.
Основные операции совместного использования указанных способов можно сформулировать следующим образом:
создают приемную систему из нескольких (не менее трех) гидроакустических антенн или отдельных приемников, распределенных линейно в горизонтальной плоскости пространства,
фиксируют глубину погружения приемной системы h,
измеряют скорость звука в среде С,
принимают шумовой сигнал объекта каждой из антенн,
формируют совокупность гипотез о направлении α и дальности r объекта в горизонтальной плоскости в виде двумерной сетки «направление-дальность»,
формируют совокупность задержек по времени ταri, характеризующих фронт волны в горизонтальной плоскости,
измеряют совокупность взаимно-корреляционных функций сигнала для каждой пары антенн,
получают индикаторные показатели для каждого узла сетки «направление-дальность», суммируя значения измеренных взаимно-корреляционных функций сигнала всех пар антенн, взятые в точках задержек по времени ταri,
определяют направление и дальность объекта по узлу сетки, в котором индикаторный показатель принимает максимальное значение,
формируют совокупность гипотез о глубине объекта в виде координатной оси «глубина»,
осуществляют прогнозный расчет лучевой структуры сигнала в вертикальной плоскости, в результате которого определяют совокупность звуковых лучей, достигающих измеренной дальности,
формируют для каждой гипотезы о глубине свой массив расчетных запаздываний сигнала между лучами в вертикальной плоскости,
измеряют автокорреляционную функцию сигнала для одной из антенн,
получают индикаторный показатель для каждого отсчета координатной оси «глубина», суммируя значения автокорреляционной функции сигнала, взятые в точках массива расчетных запаздываний сигнала,
определяют глубину объекта по отсчету координатной оси, в котором индикаторный показатель принимает максимальное значение.
Таким образом, можно произвести совместное определение направления, дальности и глубины погружения морского шумящего объекта с использованием горизонтальной распределенной приемной антенной системы. Однако, если для определения направления и дальности в способе используется информация от всей совокупности антенн (приемников), то для определения глубины погружения объекта используется информация только от одной антенны. Это делает помехоустойчивость способа неравномерной: отношение сигнал/помеха на одной антенне всегда меньше, чем отношение сигнал/помеха на совокупности антенн, следовательно, точность определения глубины будет потенциально хуже точности определения направления и дальности. Здесь следует пояснить, что отношение сигнал/помеха увеличивается при синфазном накоплении (сложении) сигнала, которое может быть осуществлено в типовом тракте шумопеленгования по приемникам (антеннам), с последующим накоплением по времени или по частоте [Евтютов А.П., Колесников А.Е., Корепин Е.А. Справочник по гидроакустике // Л.: Судостроение. - 1988.].
Задача изобретения - повысить помехоустойчивость при определении направления, дальности и глубины погружения для шумящего объекта, находящегося в ближнем поле с помощью совокупности горизонтально расположенных приемных антенн.
Для решения поставленной задачи в способ определения полной совокупности координат морского шумящего объекта, в котором
создают приемную систему из нескольких I (не менее трех) гидроакустических антенн или отдельных приемников, распределенных линейно в горизонтальной плоскости пространства,
фиксируют глубину погружения приемной системы h,
измеряют скорость звука в среде C,
формируют совокупность гипотез о направлении α и дальности r объекта в горизонтальной плоскости в виде двумерной сетки «направление-дальность»,
формируют для каждой из i антенн совокупность задержек по времени ταri, характеризующих фронт волны в горизонтальной плоскости,
принимают шумовой сигнал объекта каждой из антенн,
осуществляют предварительную обработку сигнала,
определяют направление, дальность и глубину объекта,
введены новые признаки, а именно:
формируют совокупность гипотез о запаздывании δ сигнала между лучами в вертикальной плоскости,
формируют трехмерную сетку «направление-дальность-запаздывание», дополняя двумерную сетку совокупностью гипотез о запаздывании сигнала между лучами в вертикальной плоскости,
формируют мощность сигнала Рαrδ для каждой точки сетки «направление-дальность-запаздывание», осуществляя при обработке сигнала совместное сканирование по задержкам τrαi, характеризующим фронт волны в горизонтальной плоскости, и сканирование по запаздываниям сигнала δ, характеризующим совокупность фронтов волн по лучам в вертикальной плоскости,
определяют направление А, дальность объекта R и запаздывание сигнала Δ как ту точку трехмерной сетки, в которой мощность сигнала принимает максимальное значение,
определяют глубину Н объекта по формуле
При этом, формирование мощности сигнала Pαrδ для каждой точки сетки «направление-дальность-запаздывание» может быть осуществлено как во временной, так и в частотной областях.
Для формирования мощности сигнала во временной области используют преобразования сигнала, реализующие формулу:

где Si(t) - временной процесс сигнала на входе каждой антенны номер i, t - время, от нуля до длительности выборки T,
Для формирования мощности сигнала в частотной области используют преобразования сигнала, реализующие формулу:

где Φi(ƒ) - комплексный спектр сигнала на входе каждой антенны номер i, ƒ -частота, от начального значения F1 до конечного значения F2 частотного диапазона.
Технический результат изобретения заключается в увеличении результирующей мощности принятого сигнала, что, в свою очередь, приводит к повышению отношения сигнала к помехе, и соответствует повышению помехоустойчивости.
Покажем возможность достижения указанного технического результата предложенным способом.
В большинстве практических случаев прием широкополосного сигнала осуществляется в полосе частот до единиц килогерц [Евтютов А.П., Митько В.Б. Примеры инженерных расчетов в гидроакустике. Л.: - Судостроение. - 1981], а протяженность приемной антенной системы не превышает несколько десятков метров [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. Состояние и актуальные проблемы. - СПб.: Наука. - 2004.]. Тогда согласно соотношению (1), определяющему размер ближнего поля антенны, получим протяженность ближнего поля не более единиц километров. Для таких расстояний, если объект и приемная система находятся в приповерхностном слое океана на глубинах не более 500 - 700 метров, что характерно для большинства носителей гидроакустических средств и объектов поиска [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. Состояние и актуальные проблемы. - СПб.: Наука. - 2004.], в глубоком океане к каждой из антенн всегда будут приходить по два луча: прямой луч и луч, отраженный от поверхности.
Совокупность прямых лучей образует сферический фронт волны, что используется в прототипе и аналогах для определения направления и дальности объекта при приеме на горизонтальную приемную антенную систему путем анализа задержек по времени между приемом сигнала на каждую из антенн.
Совокупность отраженных лучей аналогичным образом создает сферический фронт волны, который условно можно назвать фронтом отраженной волны. Фронт отраженной волны имеет форму, аналогичную форме прямой волны. При этом, фронт отраженной волны запаздывает по времени относительно фронта прямой волны. В способах-аналогах и способе-прототипе фронт отраженной волны не только не используется, но даже не учитывается его существование.
С другой стороны известно [Евтютов А.П., Колесников А.Е., Корепин Е.А. Справочник по гидроакустике // Л.: Судостроение. - 1988. - С. 222-224], что антенная система, позволяет увеличить мощность принятого сигнала при синфазном сложении сигналов с ее элементов. Для обеспечения синфазного сложения сигналов предварительно осуществляют их фазовое смещение, после чего получают мощность сигнала, выполняя квадратичное детектирование и накопление. Совокупность указанных процедур для синфазно сложенного сигнала обеспечивает для всей системы повышение помехоустойчивости, которая характеризуется приращением отношения сигнала к помехе на выходе системы относительно отношения сигнала к помехе на входе антенны [Евтютов А.П., Митько В.Б. Примеры инженерных расчетов в гидроакустике // Л.: Судостроение. - 1981.].
Если при синфазном сложении сигналов учесть оба фронта волн, то результирующая мощность будет увеличена, что, в свою очередь, приведет к повышению отношения сигнала к помехе и повышению помехоустойчивости. Для учета фазовых смещений по совокупности фронтов волн в заявляемом способе предусмотрена процедура совместного сканирования по задержкам, характеризующим фронт волны в горизонтальной плоскости, то есть фронт прямой волны, и сканирование по запаздываниям сигнала, характеризующим совокупность фронтов волн в вертикальной плоскости, то есть сканирование по запаздываниям между фронтами, в результате чего получается мощность сигнала Pαrδ для каждой точки сетки «направление-дальность-запаздывание».
Таким образом, увеличение результирующей мощности обеспечивается синфазным сложением сигналов, пришедших на совокупность всех антенн системы, с учетом двух типов фазового смещения: смещения по задержкам, характеризующим фронт волны в горизонтальной плоскости, и смещения по запаздываниям, характеризующим совокупность фронтов волн в вертикальной плоскости. Оба типа фазового смещения учитываются при получении общей мощности сигнала Pαrδ для каждой точки сетки «направление-дальность-запаздывание», что увеличивает отношение сигнал/помеха для всех точек сетки, и, следовательно, позволяет повысить помехоустойчивость при определении как направления, так и дальности и глубины погружения шумящего объекта.
Динамический диапазон численных значений задержек τrαi, характеризующих фронт волны в горизонтальной плоскости, может быть получен на основании простых геометрических соотношений, и известен из [Гампер Л.Е., Ермоленко А.С., Манов К.В.; Открытое акционерное общество «Концерн «Океанприбор». Способ пассивного определения координат источников излучения. Патент №2507531 РФ, МПК G01S 3/80. №2012147666/07; Заявл. 08.11.2012; Опубл. 20.02.2014, Бюл. №5]. Для этого используют формулу:

где α, r - совокупность гипотез о направлении и дальности объекта;
xi - отстояние антенны номер i от центра приемной системы;
C - скорость звука в среде.
Динамический диапазон численных значений запаздываний сигнала δ, характеризующих совокупность фронтов волны в вертикальной плоскости, также может быть получен на основании простых геометрических соотношении. Покажем это.
Пути, пройденные прямым и отраженным лучами от объекта к антенне, получаем по теореме Пифагора:
где S0 - путь, пройденный прямым лучом;
S1+S2 - путь, пройденный отраженным лучом, как сумма пути от объекта до поверхности и пути от поверхности до антенны после отражения;
r - горизонтальное расстояние между объектом и антенной;
h - глубина погружения приемной системы;
Н - глубина погружения объекта.
Тогда запаздывание δ между лучами (между фронтами) определится как:

Путем осуществления совместного сканирования по задержкам τrαi и по запаздываниям сигнала δ, в способе выполняется синфазное сложение лучей, пришедших ко всем антеннам приемной системы, как в составе фронта прямого сигнала, так и в составе фронта отраженного сигнала. Это увеличивает результирующую мощность, и повышает помехоустойчивость способа.
Как видно из выражения (2), запаздывание δ между лучами зависит от глубины объекта H. При этом, параметрами в указанном выражении можно считать глубину h приемной системы, расстояние до объекта r и скорость звука C.Тогда после измерения параметров можно определить глубину погружения объекта. Для этого, воспользовавшись формулой приближенных вычислений [Бронштейн И.Н., Семендяев К.А. Справочник по математике. М.: Гос. изд-во технико-теоретической литературы. - 1956], можно использовать соотношение:
где R и Δ -дальность объекта R и запаздывание сигнала Δ, полученные как та точка сетки, в которой мощность сигнала Pαrδ принимает максимальное значение;
h - глубина погружения приемной системы;
C - скорость звука в среде.
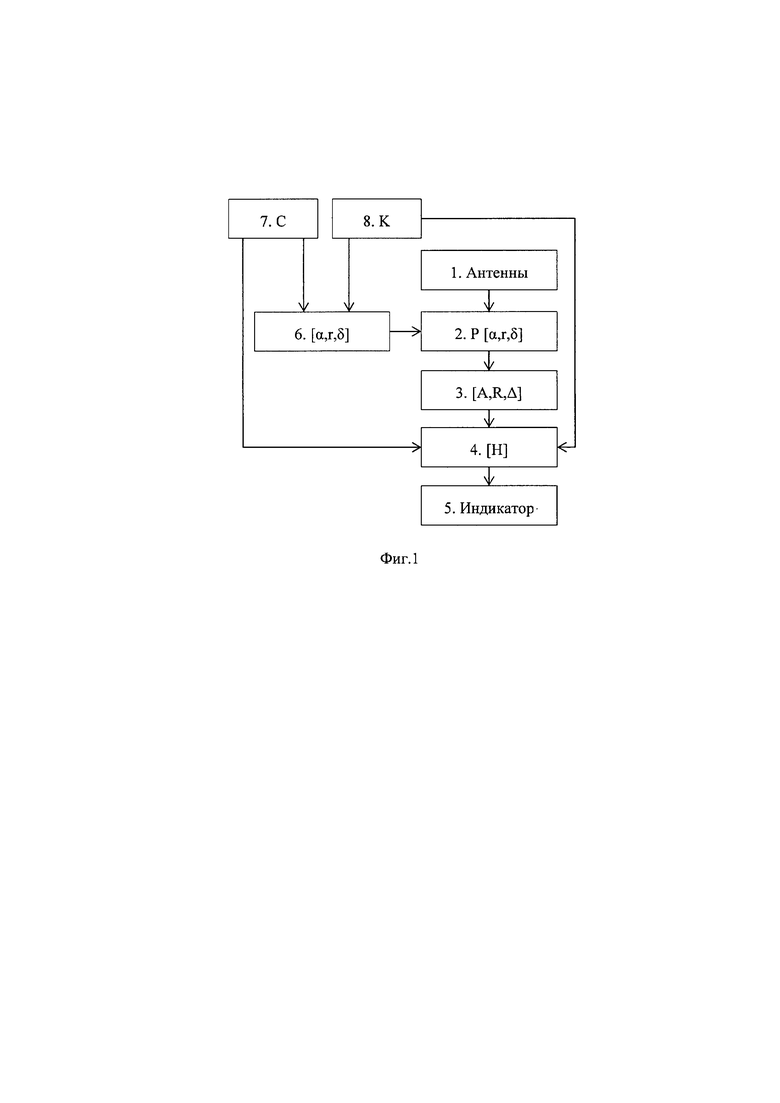
Сущность изобретения поясняется фиг. 1, на которой изображена укрупненная блок-схема устройства, реализующего предлагаемый способ.
Структурная схема на фиг. 1 включает последовательно соединенные блоки: Антенны 1, блок 2 вычисления мощности сигнала для сетки «направление-дальность-запаздывание» (P [α,r,δ]), блок 3 определения направления, дальности и запаздывания ([А,R,Δ]), блок 4 определения глубины ([H]), индикатор 5 Выход блока 6 формирования сетки «направление-дальность-запаздывание» ([α,r,δ]) подключен ко второму входу блока 2. Первый и второй выходы блока 7 измерения скорости звука (С) подключены к первому входу блока 5 и второму входу блока 4. Первый и второй выходы блока 8 фиксации координат антенн (K) подключены ко второму входу блока 6 и третьему входу блока 4.
Антенна 1 может быть реализована, например, согласно [Гладилин А.В., Пирогов В.А., Дмитриенко Ю.И., Старожук Е.А.; Российская Федерация, от имени которой выступает Министерство промышленности и торговли Российской Федерации. Гидроакустическая буксируемая антенна для геофизических работ. Патент №2568055 РФ, МПК G01S 15/02. №2014103998/28; Заявл. 06.02.2014; Опубл. 10.11.2015, Бюл. №31]. Процедуры, реализуемые в блоках 2-6, могут быть реализованы программным образом в цифровом вычислительном комплексе современных гидроакустических систем [Бетелин В.Б., Капустин Г.И., Кокурин В.А., Корякин Ю.А., Лисс А.Р., Немытов А.И., Першин А.С., Рыжиков А.В., Челпанов А.В., Шалин С.А.; ФГУП «Центральный научно-исследовательский институт «Морфизприбор», Научно-исследовательский институт системных исследований РАН. Цифровой вычислительный комплекс для обработки сигналов в гидроакустических системах. Патент №2207620 РФ, МПК G06F 15/16, G01S 15/88. №2001106588/09; Заявл. 11.03.2001; Опубл. 27.06.2003, Бюл. №18]. В качестве блока 7 может быть использован, например, один из измерителей скорости звука, которые серийно выпускаются и устанавливаются совместно с гидроакустической аппаратурой [Комляков В.А. Корабельные средства измерения скорости звука и моделирование акустических полей в океане. - СПб.: Наука. - 2003. - С. 169-227]. В качестве блока 8 может быть использован, например, эхолот [Бородин A.M.; Акционерное общество «Концерн «Океанприбор». Эхолот. Патент №2789812 РФ, МПК G01S 15/10. №2022101052; Заявл. 17.01.2022; Опубл. 10.02.2023, Бюл. №4].
С помощью аппаратуры (фиг.1) заявленный способ реализуется следующим образом.
Предварительно в блоке 7 С измеряют скорость звука в среде С, что возможно осуществить измерителями, известными из [Комляков В.А., Корабельные средства измерения скорости звука и моделирование акустических полей в океане. - СПб.: Наука. 2003. - С.169-227].
В блоке 8 K измеряют и фиксируют координаты антенной приемной системы: отстояние xi от центра приемной системы до каждой i-ой антенны из I может быть измерено в процессе крепления антенн, глубина погружения приемной системы h может быть измерена, в том числе с помощью гидроакустических средств, например [Бородин A.M.; Акционерное общество «Концерн «Океанприбор». Эхолот. Патент №2789812 РФ, МПК G01S 15/10. №2022101052; Заявл. 17.01.2022; Опубл. 10.02.2023, Бюл. №4].
Скорость звука и координаты антенной приемной системы поступают в блок 4 и блок 6.
В блоке 6 формируют трехмерную сетку «направление-дальность-запаздывание». Диапазон значений по направлению α и дальности r выбирают исходя из выполнения условий ближнего поля антенны [Терминологический словарь-справочник по гидроакустике / Р.Х. Бальян, Э.В. Батаногов, А.В. Богородский и др. Л.: Судостроение. -1989]. Диапазон значений по запаздыванию δ выбирают на основании соотношения (2) для фиксированной глубины погружения приемной системы и требуемого диапазона глубин интересующего объекта поиска. При этом интервалы дискретности значений сетки выбирают исходя из требований по точности оценки параметров. Далее в блоке 6 формируют совокупность задержек по времени ταri характеризующих фронт волны в горизонтальной плоскости как Указанное геометрическое соотношение, заимствованно из [Гампер Л.Е., Ермоленко А.С., Манов К.В.; Открытое акционерное общество «Концерн «Океанприбор». Способ пассивного определения координат источников излучения. Патент №2507531 РФ, МПК G01S 3/80. №2012147666/07; Заявл. 08.11.2012; Опубл. 20.02.2014, Бюл. №5].
Указанное геометрическое соотношение, заимствованно из [Гампер Л.Е., Ермоленко А.С., Манов К.В.; Открытое акционерное общество «Концерн «Океанприбор». Способ пассивного определения координат источников излучения. Патент №2507531 РФ, МПК G01S 3/80. №2012147666/07; Заявл. 08.11.2012; Опубл. 20.02.2014, Бюл. №5].
В процессе работы шумовой гидроакустический сигнал принимается совокупностью из I антенн 1, где осуществляется его предварительная обработка, в том числе, аналого-цифровое преобразование и, при необходимости, перевод сигнала в частотную область. Для перевода сигнала в частотную область используется процедура быстрого преобразования Фурье, известная из [Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов // Пер. с англ. М.: Мир. - 1978]. Сигналы всех антенн одновременно поступают в блок 2.
В блоке 2 осуществляют преобразования сигнала, позволяющие получить мощность сигнала Pαrδ для каждой точки сетки «направление-дальность-запаздывание».
Для этого сначала осуществляют сканирование сигнала по точкам сетки [α,r,δ]. Для сканирования используют типовую процедуру фазового сдвига сигнала на каждом приемнике с последующим сложением сдвинутых сигналов, известную из способов формирования характеристики направленности [Баскин В.В., Гришман Т.Д., Казаков М.Н., Криницкий A.M., Леоненок Б.И., Смарышев М.Д.; ФГУП «Центральный научно-исследовательский институт «Морфизприбор». Способ формирования частотно-независимой характеристики направленности рабочим сектором многоэлементной гидроакустической приемной круговой антенны. Патент №2293449 РФ, МПК H04R 1/44, G01S 15/02. №2005113363/09; Заявл. 03.05.2005; Опубл. 10.02.2007, Бюл. №4], и позволяющую получить при дальнейшей обработке синфазное сложение сигналов. Отличие предлагаемого способа состоит в том, что создают две копии сигнала. Для первой копии сигнала осуществляют сдвиг на задержку τrαi характеризующую фронт волны в горизонтальной плоскости, а для второй копии сигнала осуществляют сдвиг на сумму задержки τrαi и запаздывания сигнала δ, характеризующего совокупность фронтов волны в вертикальной плоскости. Это позволяет синфазно сложить два фронта сигнала, пришедших по двум лучам, то есть с дополнительным запаздыванием в вертикальной плоскости относительно общего фронта в горизонтальной плоскости. Процедура сдвига сигнала на задержку τrαi во временной области записывается математической формулой как , а процедура сдвига копии сигнала на сумму задержки τrαi и запаздывания δ записывается как
, а процедура сдвига копии сигнала на сумму задержки τrαi и запаздывания δ записывается как , где Si(t) - временной процесс сигнала на входе каждой антенны номер i, t - время. Аналогичные процедуры сдвига могут быть осуществлены в частотной области. Тогда осуществляют умножение комплексного спектра сигнала на фазовый коэффициент, соответствующий необходимому сдвигу [Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов // Пер. с англ. М.: Мир. - 1978]. Формулы для сдвига сигнала и его копии в частотной области записываются как:
, где Si(t) - временной процесс сигнала на входе каждой антенны номер i, t - время. Аналогичные процедуры сдвига могут быть осуществлены в частотной области. Тогда осуществляют умножение комплексного спектра сигнала на фазовый коэффициент, соответствующий необходимому сдвигу [Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов // Пер. с англ. М.: Мир. - 1978]. Формулы для сдвига сигнала и его копии в частотной области записываются как: и
и , соответственно, где Φi[(ƒ) - комплексный спектр сигнала на входе каждой антенны номер i, ƒ - частота, π - число пи, j - мнимая единица. После сдвига сигнала и сдвига копии сигнала, осуществляют их сложение между собой и по всей совокупности антенн i от 1 до I. Совокупность процедур сдвига и последующего сложения записывается математическими формулами как:
, соответственно, где Φi[(ƒ) - комплексный спектр сигнала на входе каждой антенны номер i, ƒ - частота, π - число пи, j - мнимая единица. После сдвига сигнала и сдвига копии сигнала, осуществляют их сложение между собой и по всей совокупности антенн i от 1 до I. Совокупность процедур сдвига и последующего сложения записывается математическими формулами как:

После осуществления процедур сканирования сигнала осуществляют получение мощности. Для этого используют последовательность процедур, водящих в типовой тракт шумопеленгования [Евтютов А.П., Колесников А.Е., Корепин Е.А. Справочник по гидроакустике // Л.: Судостроение. - 1988.]: квадратичное детектирование и накопление, которые записываются математически как возведение в квадрат и последующее суммирование, соответственно. При работе во временной области суммирование осуществляется по времени t от нуля до длительности выборки Т. При работе в частотной области суммирование осуществляется по частоте ƒ от начального значения F1. до конечного значения F2 частотного диапазона. Такие процедуры накопления равнозначны [Евтютов А.П., Колесников А.Е., Корепин Е.А. Справочник по гидроакустике // Л.: Судостроение. - 1988.].
Учитывая изложенное, математические формулы для реализации полного состава процедур блока 2 во временной области или в частотной области, соответственно, можно записать следующим образом:

где Si(t) - временной процесс сигнала на входе каждой антенны номер i, t - время, от нуля до длительности выборки Т;
Φ(ƒ)- комплексный спектр сигнала на входе каждой антенны номер i, ƒ - частота, от начального значения F1 до конечного значения F2 частотного диапазона.
Полученная мощность сигнала Pαrδ для каждой точки сетки «направление-дальность-запаздывание» поступает из блока 2 в блок 3, где определяют направление А, дальность объекта R и запаздывание сигнала Δ как ту точку трехмерной сетки, в которой мощность сигнала принимает максимальное значение:

Полученные значения A, R и Δ поступаю в блок 4. Одновременно в блок 4 из блока 7 поступает измеренная скорость звука C, а из блока 8 - глубина погружения приемной системы h. В блоке 4 определяют глубину H объекта по формуле:

Полученные оценки направления А, дальности объекта R и глубины объекта Н поступают из блока 4 на индикатор 5.
Все изложенное позволяет считать задачу изобретения решенной. Предложен способ определения полной совокупности координат морского шумящего объекта, предназначенный для совместной оценки направления, дальности и глубины погружения объекта с использованием горизонтальной линейной многоэлементной приемной антенны в ближнем акустическом поле, и обладающий повышенной помехоустойчивостью относительно прототипа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ пассивного определения координат шумящего объекта | 2022 |
|
RU2798390C1 |
| Способ определения класса объекта, обнаруженного шумопеленгаторной станцией | 2023 |
|
RU2835874C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2016 |
|
RU2624798C1 |
| Способ распознавания гидроакустических шумов морских объектов | 2023 |
|
RU2841513C2 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ | 2015 |
|
RU2590933C1 |
| Способ получения информации о подводном шумящем объекте | 2022 |
|
RU2803528C1 |
| Устройство получения информации о шумящем в море объекте | 2017 |
|
RU2650830C1 |
| Способ локализации в пространстве шумящего в море объекта | 2023 |
|
RU2816480C1 |
| Способ определения глубины погружения шумящего в море объекта | 2023 |
|
RU2816481C1 |
| Устройство получения информации о шумящем в море объекте | 2017 |
|
RU2654365C1 |
Использование: изобретение относится к области гидроакустики, может быть использовано при решении задач обработки сигнала в пассивной гидролокации, и предназначено для совместной оценки направления, дальности и глубины погружения морского шумящего объекта с использованием горизонтальной линейной многоэлементной приемной антенны в ближнем акустическом поле. Сущность: при реализации способа осуществляют синфазное сложение сигналов, пришедших на совокупность всех антенн системы, с учетом двух типов фазового смещения: смещения по задержкам, характеризующим фронт волны в горизонтальной плоскости, и смещения по запаздываниям, характеризующим совокупность фронтов волн в вертикальной плоскости. Технический результат: увеличение результирующей мощности принятого сигнала, что, в свою очередь, приводит к повышению отношения сигнала к помехе, и соответствует повышению помехоустойчивости. 2 з.п. ф-лы, 1 ил.
1. Способ определения полной совокупности координат морского шумящего объекта, в котором создают приемную систему из нескольких I (не менее трех) гидроакустических антенн или отдельных приемников, распределенных линейно в горизонтальной плоскости пространства, фиксируют глубину погружения приемной системы h, измеряют скорость звука в среде C, формируют совокупность гипотез о направлении α и дальности r объекта в горизонтальной плоскости в виде двумерной сетки «направление-дальность», формируют для каждой из i антенн совокупность задержек по времени ταri, характеризующих фронт волны в горизонтальной плоскости, принимают шумовой сигнал объекта каждой из антенн, осуществляют предварительную обработку сигнала, определяют направление, дальность и глубину объекта, в котором формируют совокупность гипотез о запаздывании δ сигнала между лучами в вертикальной плоскости, формируют трехмерную сетку «направление-дальность-запаздывание», дополняя двумерную сетку совокупностью гипотез о запаздывании сигнала между лучами в вертикальной плоскости, формируют мощность сигнала Pαrδ для каждой точки сетки «направление-дальность-запаздывание», осуществляя при обработке сигнала совместное сканирование по задержкам τrαi, характеризующим фронт волны в горизонтальной плоскости, и сканирование по запаздываниям сигнала δ, характеризующим совокупность фронтов волн по лучам в вертикальной плоскости, определяют направление A, дальность объекта R и запаздывание сигнала Δ как ту точку трехмерной сетки, в которой мощность сигнала принимает максимальное значение, определяют глубину H объекта по формуле

2. Способ по п. 1, в котором мощность сигнала Pαrδ формируют по формуле:

где Si (t) - временной процесс сигнала на входе каждой антенны номер i, t - время, от нуля до длительности выборки T.
3. Способ по п. 1, в котором мощность сигнала Pαrδ формируют по формуле:

где Φi(ƒ) - комплексный спектр сигнала на входе каждой антенны номер i, ƒ - частота, от начального значения F1 до конечного значения F2 частотного диапазона.
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| Способ пассивного определения координат шумящего объекта | 2022 |
|
RU2798390C1 |
| Многочастотный доплеровский способ измерений скорости течений в водной среде | 2022 |
|
RU2795579C1 |
| Способ пассивного определения координат движущегося слабого источника излучения | 2019 |
|
RU2724315C1 |
| Способ определения местоположения подводного объекта | 2018 |
|
RU2709100C1 |
| WO 2008138433 A1, 20.11.2008. | |||
