Изобретение относится к области гидроакустики, может быть использовано при решении задач обработки шумового сигнала в гидроакустических системах, и предназначено для определения глубины погружения шумящего в море объекта.
Известны способы [Корецкая А.С., Мельканович B.C. Патент РФ №2650830 от 17.04.2018. Устройство получения информации о шумящем в море объекте. МПК G01S 3/80, Зеленкова И.Д., Афанасьев А.Н., Корецкая А.С. Патент РФ №2740169 от 12.01.2021. Способ определения координат морской шумящей цели. МПК G01S 15/00], которые предназначены для определения дальности и глубины погружения шумящего в море объекта. Способы основаны на сравнении параметров принятого шумового сигнала с аналогичными параметрами, рассчитанными для совокупности гипотез о возможном месте объекта в узлах сетки по расстоянию и глубине для текущих гидролого-акустических условий. В первом способе в качестве сравниваемых параметров используются отношения сигнал/помеха в нескольких частотных диапазонах, а во втором - задержки по времени между моментами прихода двух лучей и совокупные интенсивности этих лучей. Решение о месте цели принимается по тому узлу сетки, для которого расчетно-прогнозируемые параметры сигнала совпадают с наблюдаемыми параметрами по заданному критерию похожести. Для получения расчетно-прогнозируемых параметров осуществляют прогнозный расчет лучевой структуры сигнала.
Общим недостатком указанных способов являются большие вычислительные затраты, необходимые, как на первом этапе для формирования лучевой структуры сигнала для набора возможных положений шумящего объекта по сетке «расстояние-глубина», так и на втором этапе для сравнения параметров принятого сигнала с расчетно-прогнозируемыми параметрами по той же сетке «расстояние-глубина».
С учетом того, что известны простые способы определения расстояния до шумящего объекта, например [Волкова А.А., Консон А.Д. Потенциальные возможности двухчастотного метода оценки расстояния // Гидроакустика. - 2009. - №9. - С. 43-51], было бы полезно иметь способ определения только глубины, реализуемый при малых вычислительных затратах.
Наиболее близким аналогом по решаемой задаче и выполняемым процедурам к предлагаемому изобретению является способ [Корецкая А.С, Зеленкова И.Д. Патент РФ №2788341 от 17.01.2023. Способ локализации в пространстве шумящего в море объекта. МПК G01S 3/80].
В указанном способе выполняются следующие основные операции:
измеряют скорость звука в воде в зависимости от глубины,
формируют таблицу зависимости задержек от глубины погружения шумящего в море объекта в текущих гидролого-акустических условиях, для чего формируют лучевую структуру сигнала на входе антенны для набора возможных положений шумящего объекта по сетке «расстояние-глубина», вычисляют для каждого возможного положения шумящего объекта из этого набора расчетную задержку по времени хода пары наиболее интенсивных лучей, пришедших на вход антенны под близкими углами, и объединяют расчетные задержки, полученные для совокупности расстояний на одной глубине, в единую ячейку таблицы путем формирования среднего значения,,
осуществляют на выходе шумопеленгатора обнаружение широкополосного сигнала шумящего в море объекта,
измеряют автокорреляционную функцию сигнала,
обнаруживают в ней наиболее интенсивный корреляционный максимум, исключая глобальный максимум в начале координат, и находят его абсциссу, представляющую собой измеренную задержку по времени хода пары лучей,
определяют глубину погружения шумящего в море объекта путем выбора той ячейки таблицы по глубине, которая соответствует ячейке расчетной задержки, наиболее близкой к измеренной задержке.
Способ основан на физической зависимости задержки между временами хода лучей от глубины погружения шумящего объекта, и осуществляет определение глубины погружения объекта на основании анализа этой зависимости. В способе на первом этапе формируют лучевую структуру сигнала для набора возможных положений шумящего объекта по сетке «расстояние-глубина», а затем объединяют расчетные задержки, полученные для совокупности расстояний на одной глубине, в единую ячейку таблицы. Это позволяет уменьшить вычислительные затраты на втором этапе путем перебора только гипотез о глубине, без перебора гипотез о расстоянии. Однако большие вычислительные затраты первого этапа, связанные с формированием лучевой структуры сигнала, сохраняются. Необходимо отметить, что эти вычислительные затраты действительно являются большими, поскольку для формирования лучевой структуры сигнала предварительно необходимо для каждого луча, а их' может быть более 500, вышедшего из каждой точки сетки «дистанция-глубина», осуществлять так называемую протяжку, когда на основании текущих координат положения луча вычисляются и сохраняются его последующие координаты, другими словами, программным способом для каждого луча как бы рисуется его траектория.
Задача изобретения - исключить вычислительные затраты, связанные с формированием лучевой структуры сигнала.
Для решения поставленной задачи в способ определения глубины погружения шумящего в море объекта, в котором
измеряют скорость звука в воде в зависимости от глубины С(х),
формируют набор гипотез о глубине погружения объекта Hi,
осуществляют на выходе шумопеленгатора обнаружение широкополосного сигнала шумящего в море объекта,
измеряют автокорреляционную функцию сигнала, обнаруживают в ней наиболее интенсивный корреляционный максимум, исключая глобальный максимум в начале координат, и находят его абсциссу, представляющую собой измеренную задержку Т по времени хода пары лучей,
определяют глубину погружения шумящего в море объекта,
введены новые признаки, а именно:
погружают приемную антенну шумопеленгатора на глубину h0, заведомо превышающую максимально возможную глубину погружения шумящего объекта,
измеряют угол прихода сигнала в вертикальной плоскости θ0,
для каждой гипотезы о глубине погружения объекта Hi вычисляют критерий соответствия по формуле  где Т - задержка по времени хода пары лучей, C(h0) - скорость звука на глубине шумопеленгатора,
где Т - задержка по времени хода пары лучей, C(h0) - скорость звука на глубине шумопеленгатора,  - угол выхода луча, соответствующий каждой гипотезе о глубине объекта, С(Hi) - скорость звука на глубине каждой гипотезы о глубине погружения объекта, θ0 - угол прихода сигнала,
- угол выхода луча, соответствующий каждой гипотезе о глубине объекта, С(Hi) - скорость звука на глубине каждой гипотезы о глубине погружения объекта, θ0 - угол прихода сигнала,
а глубину погружения шумящего в море объекта Н определяют путем выбора той гипотезы о глубине, для которой критерий соответствия принимает наименьшее значение 
Техническим результатом изобретения является значительное уменьшение вычислительных затрат, необходимых для определения глубины погружения шумящего объекта.
Технический результат достигается за счет того, что в способе взамен сложных процедур формирования лучевой структуры сигнала на входе антенны для большого набора возможных положений шумящего объекта по сетке «расстояние-глубина» используются простые аналитические зависимости, связывающие параметры сигнала в точке приема с параметрами в точке излучения. Покажем это.
Рассмотрим распространение звука в морской среде от источника сигнала (шумящего объекта) к приемнику (антенне шумопеленгатора). В горизонтальной плоскости звуковой сигнал распространяется прямолинейно, а в вертикальной плоскости - претерпевает рефракцию, то есть его путь искривляется. Это связано в морской среде с непостоянством скорости распространения звука на разных глубинах. В рамках лучевой теории [Бреховских Л.М., Лысанов Ю.П. Теоретические основы акустики океана. М.: Наука. - 2007. - 370 с.] это объясняется через понятие лучевой трубки (или кратко луча). Под лучом понимают звуковой сигнал, выходящий из источника и проходящий на некотором удалении от него через произвольно малый контур. В рамках лучевой теории считают, что звуковая энергия «течет» по совокупности лучевых трубок (лучей), не пресекая их стенок. Из источника сигнала в сторону приемника выходит бесконечное множество лучей в вертикальной плоскости под углами от +90° вверх до -90° вниз относительно горизонтальной плоскости. Каждый из этих лучей распространяется по своей уникальной траектории, претерпевая полные внутренние отражения и (или) отражаясь от дна или поверхности.
Несмотря на то, что из источника выходит бесконечное множество лучей, не все из них достигают приемника, находящегося в фиксированной точке по глубине и дальности. Многие из лучей теряют большую долю своей интенсивности при отражениях от поверхности и дна, а другие имеют такую траекторию, которая для фиксированного расстояния до приемника проходит ниже или выше глубины его погружения. Таким образом, одиночный источник и приемник, как фиксированные точки связывает между собой ограниченное количество лучей.
Каждый луч характеризуется своей уникальной траекторией и временем распространения звука вдоль луча. Лучи достигают антенны не одновременно, а с некоторой задержкой, равной разности между временами распространения звука вдоль отдельных лучей. Первым достигает антенны самый быстрый луч, затем второй, третий, и т.д. Определить полное время распространения звука по лучу путем анализа принятого сигнала не представляется возможным. Однако, анализ автокорреляционной функции сигнала позволяет определить задержки по времени между моментами прихода каждых двух лучей.
В работе [Волкова А.А., Консон А.Д., Корецкая А.С.Пространственная локализация источника широкополосного сигнала по глубине погружения в условиях подводного звукового канала // Гидроакустика. - 2022. - №2. - С. 14-25] показано, что если опустить приемник на глубину, превышающую глубину погружения источника, то источник и приемник оказываются связанными между совой совокупностью пар лучей, обладающих следующими тремя свойствами:
1) Из точки источника лучи пары выходят под углами, близкими по абсолютному значению, но противоположными по знаку.
2) К точке приемника лучи пары подходят с углами, близкими и по абсолютному значению и по знаку.
3) Для каждой из пар лучей выполняется соотношение:

где Т - задержка по времени хода между лучами в паре,
C(h0) - скорость звука на глубине приемника,
Н - глубина источника,
А - абсолютное значение угла выхода лучей из источника, которое можно считать одинаковым для обоих лучей согласно первому свойству.
Тогда, в левой части приведенного выше равенства имеем две величины, которые можно измерить в точке приема (задержка и скорость звука), а в правой части - две величины, которые являются неизвестными (глубина источника и угол луча в источнике). В связи с тем, что равенство содержит две неизвестные величины, авторам работы [Пространственная локализация источника…] не удалось получить аналитическое выражение для оценки глубины и предложить способ ее определения.
Однако, зная зависимость скорости звука от глубины, и, измерив угол прихода сигнала в вертикальной плоскости, который, согласно второму свойству для пар лучей, является углом прихода смеси сигналов обоих лучей в паре, можно составить табличную зависимость между абсолютным значением угла выхода этих лучей из источника и глубиной погружения источника. То есть набору гипотез о глубине погружения объекта Hi можно поставить в соответствие набор углов выхода луча Ai. Соответствие пар гипотез Hi↔Ai означает, что если бы наблюдаемый источник сигнала находился на глубине Hi, то абсолютное значение угла выхода пары лучей из этого источника равнялось бы Ai.
Для получения пар гипотез Hi↔Ai необходимо воспользоваться законом Снеллиуса [Бурдик B.C. Анализ гидроакустических систем. Л.: Судостроение. 1988], согласно которому для любых двух точек вдоль траектории луча сохраняется соотношение:

где  - угол луча и скорость звука на некоторой опорной глубине I,
- угол луча и скорость звука на некоторой опорной глубине I,
θJ и CJ - угол луча и скорость звука на некоторой другой глубине J.
Важно, что указанное соотношение справедливо при любом расстоянии между источником и приемником, и расчеты по этому соотношению просты и не требуют выполнения процедур протяжки лучей и формирования лучевой структуры сигнала. Необходимо отметить, что зависимость скорости звука от глубины может меняться по трассе распространения сигнала, однако эти изменения существенно менее значительны, чем суточные или, тем более, сезонные изменения скорости звука [Комляков В.А. Корабельные средства измерения скорости звука и моделирование акустических полей в океане. СПб.: Наука. - 2003]. Поэтому измерение скорости звука в месте установки шумопеленгатора считается достаточным для работоспособности всех подобных способов, к которым относятся и способы-аналоги и способ-прототип.
Приняв за опорную глубину I - глубину погружения приемника (антенны шумопеленгатора) h0, и, зная зависимость скорости звука от глубины С(х), из выражения (2) можем легко получить пары взаимосвязанных величин: гипотеза о глубине погружения объекта Hi ↔ угол выхода луча Ai на этой глубине, где для получения
каждого Л; можно записать:

где С(Hi) - скорость звука на глубине гипотезы о глубине Hi,
θ0 - измеренный угол прихода сигнала,
C(h0) - скорость звука на глубине антенны шумопеленгатора.
Тогда, подставляя взаимосвязанные пары гипотез Hi↔Ai полученные на основании соотношения (3), в правую часть выражения (1) с фиксированными измеренными параметрами Т и C(h0) в левой части, необходимо добиться равенства левой и правой частей выражения (1). Глубина погружения шумящего в море объекта определится путем выбора гипотезы о глубине из той пары, для которой будет получено наилучшее совпадение в равенстве:

В предельном случае, когда одна из гипотез точно совпадет с глубиной погружения объекта, равенство (4) должно выполняться точно. Однако, в реальной ситуации набор гипотез о глубине погружения объекта формируется с некоторым шагом (достаточным для получения необходимой точности определения глубины), поэтому точного совпадения в равенстве может не быть. Определим критерий соответствия гипотезы и глубины погружения объекта в виде:

Тогда глубина погружения объекта может быть определена как та из гипотез Hi для которой критерий соответствия принимает наименьшее значение.
Основа предлагаемого способа состоит в использовании простых аналитических соотношений (5) и (3), которые позволяют определять глубину погружения шумящего в море объекта без формирования лучевой структуры сигнала на входе антенны, что позволяет значительно уменьшить вычислительные затраты. Для возможности реализации этого в способ добавлены процедура измерения угла прихода сигнала в вертикальной плоскости, который входит в выражение (3), и процедура погружения приемной антенны шумопеленгатора на глубину, заведомо превышающую максимально возможную глубину погружения шумящего объекта, для создания условий, в которых выполняется соотношение (5). Физические основы определения глубины, связанные с наличием зависимости задержки между временами хода лучей от глубины погружения шумящего объекта, соответствуют физическим основам способа-прототипа.
Сущность изобретения поясняется фиг. 1, на которой изображена укрупненная блок-схема устройства, реализующего предлагаемый способ. Структурная схема включает последовательно соединенные блоки: Антенна 1, блок 2 формирования характеристики направленности ФХН, блок 3 вычисления автокорреляционной функции сигнала (АКФ), блок 4 определения глубины погружения объекта (ГЛУБ). Выход блока 5 измерения вертикального распределения скорости звука (ВРСЗ) соединен со вторым входом блока 4.
С помощью аппаратуры (фиг. 1) способ реализуется следующим образом.
Антенну 1 опускают на глубину h0, заведомо превышающую максимально возможную глубину погружения шумящего объекта. При этом создаются условия для распространения звуковых лучей между источником (объектом) и приемником (антенной шумопеленгатора) парами, необходимыми для реализации способа. После опускания антенны 1 на нужную глубину, она принимает шумовой сигнал, который передается в блок 2.
В блоке 2 ФХН осуществляются процедуры формирования характеристик направленности в горизонтальной и вертикальной плоскостях. Из блока 2 в блок 3 АКФ поступает шумовой сигнал с измеренных горизонтального и вертикального 0О направлений. Устройство антенны и процедуры формирования характеристик направленности известны, например, из [Евтютов А.П., Колесников А.Е., Корепин Е.А. Справочник по гидроакустике // Л.: Судостроение. - 1988. - 552 с].
В блоке 3 АКФ осуществляется вычисление автокорреляционной функции шумового сигнала [Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. - Рипол Классик, 1978] и обнаружение наиболее интенсивного локального максимума, исключая глобальный максимум в начале координат, который образовывается за счет других физических процессов, и в данном случае, не представляет интереса. Обнаружение локального максимума может быть реализовано на основании алгоритма обнаружения аномальных выбросов случайного процесса [Тейлор Д. Введение в теорию ошибок: Пер. с англ. - Мир, 1985]. Далее фиксируют абсциссу локального максимума, которая представляет собой измеренную задержку Т по времени хода пары лучей.
В блоке 6 ВРСЗ измеряют скорость звука в воде в зависимости от глубины С(х). Гидроакустические измерители скорости звука в воде являются известными устройствами, они серийно выпускаются и устанавливаются совместно с гидроакустической аппаратурой [Комляков В.А. Корабельные средства измерения скорости звука и моделирование акустических полей в океане. СПб.: Наука. - 2003].
В блоке 4 ТАБ, куда поступают измеренный угол прихода сигнала в вертикальной плоскости θ0 из блока 2 и зависимость скорости звука от глубины С(h) из блока 6, формируют таблицу гипотез о глубине погружения объекта Hi в зависимости от угла выхода луча Ai. Для этого по формуле (2) для каждой гипотезы о глубине погружения объекта вычисляют соответствующий угол выхода луча:  Количество гипотез и их значения выбирают на основании необходимой точности определения глубины погружения объекта.
Количество гипотез и их значения выбирают на основании необходимой точности определения глубины погружения объекта.
В блоке 4 ГЛУБ, куда поступают: глубина антенны h0 из блока 1, измеренная задержка Т из блока 3, зависимость скорости звука от глубины С(х) из блока 5, определяют глубину погружения объекта. Для этого:
- формируют набор гипотез о глубине погружения объекта Hi
- для каждой гипотезы о глубине погружения объекта Hi вычисляют критерий соответствия по формуле  где Т - задержка по времени хода пары лучей, C(h0) - скорость звука на глубине шумопеленгатора,
где Т - задержка по времени хода пары лучей, C(h0) - скорость звука на глубине шумопеленгатора,  - угол выхода луча, соответствующий каждой гипотезе о глубине объекта, С(Hi) - скорость звука на глубине каждой гипотезы о глубине погружения объекта, θ0 - угол прихода сигнала.
- угол выхода луча, соответствующий каждой гипотезе о глубине объекта, С(Hi) - скорость звука на глубине каждой гипотезы о глубине погружения объекта, θ0 - угол прихода сигнала.
- в качестве глубины объекта выбирают гипотезу, для которой критерий соответствия принимает наименьшее значение 
Все формулы, которые применяются в способе, в совокупности используют не более десяти простых арифметических и стандартных тригонометрических операций, и требуют минимальных вычислительных затрат. Необходимая точность оценки глубины может быть достигнута при формировании набора гипотез о глубине погружения объекта, и в случае, если формирование произведено аналогично способу-прототипу, будет получена не ниже.
Все изложенное позволяет считать задачу изобретения решенной. Предложен способ, который может быть использован при решении задач обработки шумового сигнала в гидроакустических системах, и предназначен для определения глубины погружения шумящего в море объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ локализации в пространстве шумящего в море объекта | 2022 |
|
RU2788341C1 |
| Способ получения информации о подводном шумящем объекте | 2022 |
|
RU2803528C1 |
| Способ определения координат морской шумящей цели | 2022 |
|
RU2798416C1 |
| Способ локализации в пространстве шумящего в море объекта | 2023 |
|
RU2816480C1 |
| Способ распознавания гидроакустических шумов морских объектов | 2023 |
|
RU2841513C2 |
| Способ определения координат морской шумящей цели | 2019 |
|
RU2724962C1 |
| Способ определения полной совокупности координат морского шумящего объекта | 2023 |
|
RU2817558C1 |
| Способы определения координат морской шумящей цели | 2022 |
|
RU2797161C1 |
| Способ пассивного определения координат шумящего объекта | 2022 |
|
RU2798390C1 |
| Способ определения класса объекта, обнаруженного шумопеленгаторной станцией | 2023 |
|
RU2835874C1 |

Изобретение относится к гидроакустике и может быть использовано при решении задач обработки шумового сигнала в гидроакустических системах, служит для определения глубины погружения шумящего в море объекта. Технический результат – быстродействие определения глубины погружения шумящего объекта. Результат достигается тем, что предложен способ определения глубины погружения шумящего в море объекта, основанный на приеме шумового сигнала гидроакустической антенной, измерении угла прихода сигнала в вертикальной плоскости, вычислении автокорреляционной функции сигнала с последующим определением задержи по времени между парными лучами, и определении глубины погружения шумящего объекта на основании анализа задержки и угла прихода сигнала, причем при реализации способа опускают приемную антенну шумопеленгатора на глубину, заведомо превышающую максимально возможную глубину погружения шумящего объекта. 1 ил.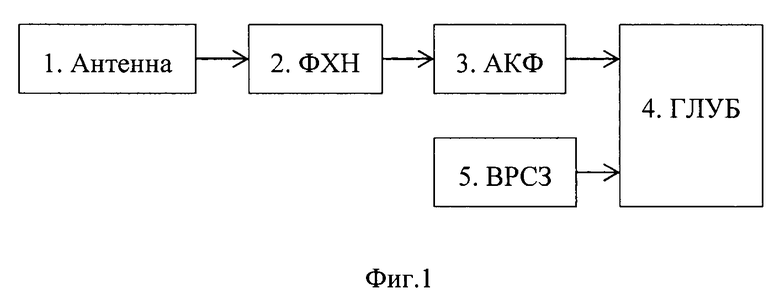
Способ определения глубины погружения шумящего в море объекта, в котором измеряют скорость звука в воде в зависимости от глубины С(х), формируют набор гипотез о глубине погружения объекта Hi, осуществляют на выходе шумопеленгатора обнаружение широкополосного сигнала шумящего в море объекта, измеряют автокорреляционную функцию сигнала, обнаруживают в ней наиболее интенсивный корреляционный максимум, исключая глобальный максимум в начале координат, и находят его абсциссу, представляющую собой измеренную задержку Т по времени хода пары лучей, определяют глубину погружения шумящего в море объекта, отличающийся тем, что погружают приемную антенну шумопеленгатора на глубину h0, заведомо превышающую максимально возможную глубину погружения шумящего объекта, измеряют угол прихода сигнала в вертикальной плоскости θ0, для каждой гипотезы о глубине погружения объекта Hi вычисляют критерий соответствия по формуле  где Т - задержка по времени хода пары лучей, C(h0) - скорость звука на глубине шумопеленгатора,
где Т - задержка по времени хода пары лучей, C(h0) - скорость звука на глубине шумопеленгатора,  - угол выхода луча, соответствующий каждой гипотезе о глубине объекта, С(Hi) - скорость звука на глубине каждой гипотезы о глубине погружения объекта, θ0 - угол прихода сигнала, а глубину погружения шумящего в море объекта Н определяют путем выбора той гипотезы о глубине, для которой критерий соответствия принимает наименьшее значение
- угол выхода луча, соответствующий каждой гипотезе о глубине объекта, С(Hi) - скорость звука на глубине каждой гипотезы о глубине погружения объекта, θ0 - угол прихода сигнала, а глубину погружения шумящего в море объекта Н определяют путем выбора той гипотезы о глубине, для которой критерий соответствия принимает наименьшее значение 
| Устройство получения информации о шумящем в море объекте | 2017 |
|
RU2650830C1 |
| Способ определения координат морской шумящей цели | 2020 |
|
RU2740169C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ОБЪЕКТА | 2016 |
|
RU2625041C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА ИЗВЕСТНЫХ ГЕОМЕТРИЧЕСКИХ РАЗМЕРОВ | 1993 |
|
RU2078353C1 |
| US 7315488 B2, 01.01.2008. | |||

