Изобретение относится к области гидроакустики и предназначено для отождествления объектов, обнаруженных несколькими гидроакустическими системами, находящимися на общем носителе. Изобретение может быть также использовано для отождествления объектов, обнаруженных разнородными системами радиоэлектронного вооружения, находящимися на общем носителе.
Задача интеграции гидроакустических систем обнаружения и отождествления объектов, обнаруженных несколькими системами, всегда ставилась разработчиками аппаратуры [1]. Системы, работающие в разных диапазонах частот, имеющие различные приемные антенны и (или) способы обработки информации, оптимизированы под обнаружение различных частей единого гидроакустического сигнала. Следовательно, отождествление объектов, обнаруженных этими системами, позволит получить наиболее полную информацию о шумящем в море объекте.
Согласно [2] отождествление объектов должно осуществляться на конечном этапе обработки информации с использованием формулярных данных об обнаруженных объектах.
Известны способы отождествления [3,4], согласно которым на основании совокупности общих оценок параметров производится отождествление формуляров объектов, обнаруженных в разных системах. Эти способы разработаны для случаев отождествления объектов, обнаруженных в сходных системах, и обладающих представительным набором общих параметров. Теоретический анализ показывает высокую эффективность этих способов отождествления. Однако на практике, при интеграции сильно разнородных систем, перечень общих параметров в формулярах разных систем ограничен, и часто состоит из одного параметра - направления на цель. Это приводит к общему недостатку способов отождествления, который заключается в их низкой эффективности на практике.
Наиболее близким аналогом по решаемым задачам и используемым принципам работы к предлагаемому изобретению является способ отождествления объектов, обнаруженных несколькими системами [5], который принят за прототип.
В способе-прототипе выполняются следующие операции:
принимают сигналы объектов раздельно несколькими системами, находящимися на общем носителе,
измеряют направление на объекты раздельно в каждой системе,
повторно принимают сигналы и повторно измеряют направление на объекты в каждой системе,
определяют величину изменения направления на каждый объект за интервал времени между измерениями раздельно в каждой системе,
формируют вектор параметров для каждого объекта для каждой системы на текущий момент времени в составе: «направление» на объект и «величина изменения направления» на объект,
определяют математическое расстояние между векторами параметров для каждой пары объектов в каждой паре систем,
принимают решение об отождествлении пары объектов двух систем в случае, если расстояние между векторами параметров менее порога.
Недостаток способа прототипа скрывается в составе используемых векторов параметров: «направление» на объект и «величина изменения направления» на объект. С одной стороны, совокупность этих параметров достаточна для отождествления объектов, наблюдаемых в общей системе координат, то есть системами, находящимися на общем носителе. Параметр «направление» характеризует мгновенное местоположение объекта по углу в полярной системе координат, а параметр «величина изменения направления» характеризует направление и скорость движения объекта. С другой стороны, параметр «величина изменения направления» является очень неудачным выбором с точки зрения соотношения между диапазоном его возможных значений и погрешностью его оценивания. При оценивании этого параметра ограничиваются интервалом времени между измерениями направления, в течение которого движение объекта можно считать равномерным, а значение величины изменения направления - постоянным. Этот интервал времени не может быть большим. Тогда погрешность оценивания параметра «величина изменения направления», обратно пропорциональная интервалу времени, не может быть малой. Диапазон возможных значений этого параметра наоборот невелик. Это связано с тем, что дальность обнаружения объектов гидроакустическими средствами составляет десятки и даже сотни километров, а скорость движения объектов относительно невелика. Тогда параметр «величина изменения направления», характеризующий тангенциальную составляющую скорости цели с учетом дальности обнаружения, для большинства объектов будет принимать малые значения. В работе [6] показано, что значения этого параметра для большинства объектов сосредоточены в окрестности нуля в диапазоне значений, который перекрывается значением погрешности оценивания этого параметра гидроакустическими средствами. Такое соотношение между малым диапазоном возможных значений и большим значением погрешности оценивания приводит к тому, что параметр «величина изменения направления» учитывается при отождествлении по способу-прототипу лишь формально, практически не оказывая влияния на результат. Следовательно, фактически отождествление осуществляется только по одной характеристике мгновенного местоположения объекта по углу, без учета параметров его движения, что явно недостаточно для однозначности принятия решения, и уменьшает эффективность отождествления.
Задачей заявляемого способа является увеличение эффективности отождествления объектов без увеличения состава сравниваемых параметров.
Для решения поставленной задачи в способ отождествления объектов, обнаруженных несколькими системами в котором неоднократно принимают сигналы объектов раздельно несколькими системами, находящимися на общем носителе, неоднократно измеряют направление на объекты раздельно в каждой системе,
введены новые признаки, а именно:
формируют пары систем как каждая система с каждой,
формируют пары объектов в каждой паре систем как каждый объект одной системы с каждым объектом парной системы,
при каждом измерении направления на все объекты формируют значения разности между направлениями на объект для каждой пары объектов в каждой паре систем,
запоминают полученные значения разностей, формируя очередной элемент массива совокупности измерений для каждой пары объектов в каждой паре систем, определяют текущие среднее значение разности и дисперсию разности в каждом массиве совокупности измерений,
принимают решение об отождествлении для пары объектов пары систем в случае совместного выполнения условий: среднее значение разности и дисперсия разности менее порога,
продолжают измерять направления нет объекты и формировать массивы совокупности измерений для остальных пар объектов всех пар систем.
Техническим результатом изобретения является отождествление объектов на основании только одного общего параметра - «направления» на объект, но с учетом двух характеристик объекта, достаточных для отождествления, а именно с учетом мгновенного местоположения объекта по углу и с учетом параметров его движения. При этом обеспечивается однозначность отождествления, и увеличивается его эффективность относительно способа-прототипа.
Покажем возможность достижения указанного технического результата предложенным способом.
Ограничимся рассмотрением одной пары объектов в одной паре систем. При наличии нескольких объектов и нескольких систем процедуры способа выполняются одинаково для каждой пары объектов в каждой паре систем.
Пусть в двух системах обнаружено по одному объекту в каждой. Необходимо определить, являются ли эти объекты единым объектом, обнаруженным в двух системах. В заявляемом способе при каждом новом измерении направления на эти объекты формируют новое значение разности между направлениями на объект в паре этих систем. А затем запоминают его как элемент массива за все время наблюдения. Само значение разности характеризует отличие объектов по мгновенному местоположению по углу, и его использование аналогично способу-прототипу. А массив разностей за все время наблюдения уже характеризует не только отличие объектов по мгновенному местоположению, но и динамику изменения этого отличия, то есть дополнительно характеризует отличия в параметрах движения объектов. Понятно, что если присутствует один единый объект, наблюдаемый разными системами, то разность между направлениями на объект будет близка к нулю и постоянна для всей совокупности наблюдений. А если присутствуют два разных объекта, наблюдаемых разными системами, обязательно будет выполняться хотя бы одно из двух условий:
- разность между направлениями на объект будет далека от нуля, в случае если объекты разнесены друг от друга по угловой координате, или (и)
- разность между направлениями на объект будет изменяться в процессе наблюдений, в случае если скорость или направление движения объектов различны.
Таким образом, анализ массива разностей между направлениями на объект позволит учесть обе характеристики объектов: и их мгновенное местоположение, и параметры их движения, без явного использования величины изменения направления в каждой системе отдельно как в способе-прототипе.
Рассматривая массив разностей как выборку случайной величины, получим [7], что среднее значение и дисперсия выборки являются основными численными характеристиками закона распределения случайной величины. Тогда, сравнение с порогом именно этих значений позволит обеспечить однозначность отождествления объектов по двум характеристикам при формальном использовании только одного общего параметра между сравниваемыми системами, то есть увеличить эффективность отождествления без увеличения состава сравниваемых параметров.
Кроме того, при рассмотрении параметра «разность» можно использовать все время наблюдения, а не ограничиваться интервалом времени, в течение которого движение объекта можно считать равномерным, а значение величины изменения направления - постоянным.
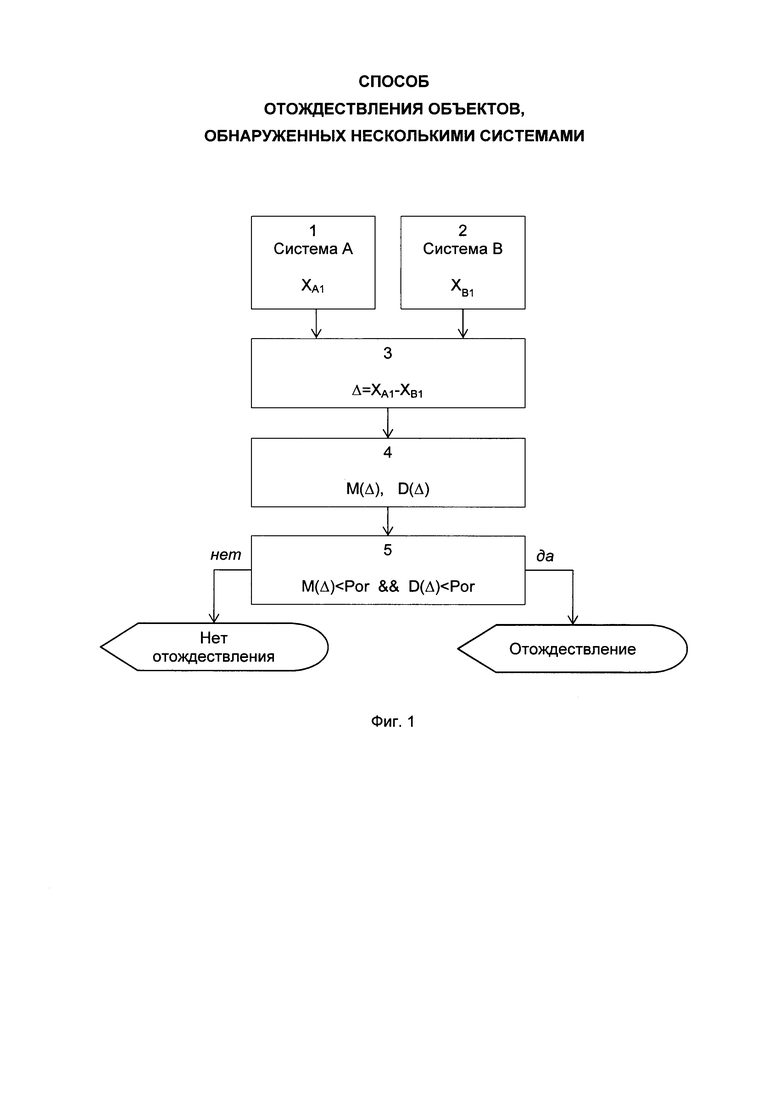
Сущность изобретения поясняется фигурой 1, на которой приведена блок-схема устройства, реализующего предлагаемый способ отождествления объектов, обнаруженных несколькими системами. Для того, чтобы не перегружать схему, она приведена для одной пары систем для случая обнаружения по одному объекту в каждой системе. Описание других случаев приведено в тексте.
На фиг. 1 выходы блока 1 Система А и блока 2 Система В соединены с двумя входами блока 3 формирования разности (Δ). Выход блока 3 соединен с входом блока 4 определения среднего значения (М) и дисперсии (D) значений массива разности. Выход блока 4 соединен с входом блока 5, в котором реализуется сравнение с порогом (Por) и принятие решения.
В динамике работы интегрированной гидроакустической системы предлагаемый способ реализуется следующим образом. Система А (блок 1) и система В (блок 2) независимо друг от друга принимают сигнал объекта и определяют направления на него ХA1 и ХB1. Направления на объект, измеренные в один момент времени, поступают в блок 3, где формируется разность между направлениями на объект Δ=ХА-ХВ.
Далее разность между направлениями на объект поступает в блок 4, в котором определяются среднее значение и дисперсия совокупности разностей между направлениями на объект за период между первым измерением и текущим моментом времени. Среднее значение (М) и дисперсия (D) на текущий момент времени n могут быть получены согласно [7]:
Далее среднее значение и дисперсия разностей между направлениями на объект поступают в блок 5, в котором производится их сравнение с порогом. Порог определяется [8] на основании погрешности измерения направления с учетом обеспечения требуемой вероятности правильного отождествления. В случае, когда совместно выполняются два условия: среднее значение разности менее порога и дисперсия разности менее порога, принимается решение об отождествлении объектов, обнаруженных системами А и В. В противном случае решение об отождествлении не принимается.
В случае, если решение об отождествлении не принимается, в последующие моменты времени, когда системы А и В каждый следующий раз измеряют направление на объект, работа способа повторяется. При этом статистика разностей направления на объект увеличивается, следовательно, уровень значимости среднего значения и дисперсии повышается, что, в свою очередь, повышает устойчивость принятого решения. Не обязательно, что решение об отождествлении будет принято на первых циклах работы способа, но когда оно будет принято (если оно будет принято), оно будет принято окончательно.
В случае, если в системе А и (или) в системе В приняты сигналы и измерены направления на более чем один объект, формируются пары объектов как каждый объект системы А с каждым объектом системы В. Количество таких пар будет n×m, где n - количество объектов в одной системе, m - количество объектов в другой системе. В гидроакустике обычно одновременно обнаруживаются не более десяти объектов в каждой системе. Тогда максимальное количество пар не будет превышать 100. Для каждой пары объектов независимо повторяются процедуры блоков 3-5. Для каждой пары объектов формируется своя разность между направлениями на объект, формируется свой массив совокупности измерений, определяются свое среднее значение разности и дисперсия разности, которые сравниваются с порогом, и принимается или не принимается решение об отождествлении именно этой пары объектов.
В случае, если количество систем более двух, формируются пары систем как каждая система с каждой. Количество таких пар будет  где k - количество систем. Для гидроакустических средств количество систем, находящихся на общем носителе, как правило, невелико. Часто бывают две системы, что составляет именно одну пару. В редких случаях количество систем доходит до пяти. В этом случае, будет сформировано 10 пар систем. Для каждой пары систем реализуется обработка согласно блок-схеме фиг. 1, при этом одна система в паре обозначается как система А, а другая система в паре - система В.
где k - количество систем. Для гидроакустических средств количество систем, находящихся на общем носителе, как правило, невелико. Часто бывают две системы, что составляет именно одну пару. В редких случаях количество систем доходит до пяти. В этом случае, будет сформировано 10 пар систем. Для каждой пары систем реализуется обработка согласно блок-схеме фиг. 1, при этом одна система в паре обозначается как система А, а другая система в паре - система В.
Следует отметить, что темп измерения направлений на объект для работы способа может быть любым, даже неравномерным, что недопустимо для корректной работы способа-прототипа.
Все изложенное позволяет считать задачу изобретения решенной. Предложен способ отождествления объектов, обнаруженных несколькими системами, который может быть использован для судовых средств радиоэлектронного наблюдения с целью отождествления объектов на основании минимального состава сравниваемых параметров.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Андреев М.Я., Охрименко С.Н., Клюшин В.В., Рубанов И.Л., Яковлев В.А. Интегрированная система подводного наблюдения для надводного корабля // Морской сборник. 2006. №8. С. 50-51.
2. Сосулин Ю.Г. Оптимальное комплексирование обнаружителей / Прием и обработка сигналов в многоканальных и комплексированных системах. М.: МАИ, 1992. С. 5-12.
3. Нерославский Б.П., Щеголева Н.Л. Об идентификации трассовых обнаружителей при многоканальном пеленговании // Гидроакустика. 2000. №2. С. 65-69.
4. Жандаров A.M. Идентификация и фильтрация измерений состояния стохастических систем. М.: Наука, 1979.
5. Шейнман Е.Л. Алгоритмы оценки эффективности идентификации сигналов в многоканальной информационной системе // Гидроакустика. 2006. №6. С. 44-48
6. Волкова А.А. Допустимая погрешность оценок параметров, используемых для идентификации целей // Гидроакустика. 2009. №9. С. 81-86
7. Вентцель Е.С. Теория вероятностей. М.: Изд-во физ. - мат. литературы 1962
8. Тюрин A.M. Введение в теорию статистических методов в гидроакустике. Л.1963
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ отождествления объектов, обнаруженных пространственно-разнесенными системами | 2019 |
|
RU2730103C1 |
| Способ отождествления сигналов, обнаруженных гидроакустическими пространственно-разнесенными системами | 2021 |
|
RU2778168C1 |
| Способ и устройство обнаружения шумящих в море объектов бортовой антенной | 2019 |
|
RU2723145C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| СПОСОБ ИНТЕГРАЦИИ СИСТЕМ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2014 |
|
RU2572792C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529441C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морского объекта | 2020 |
|
RU2759498C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВОДОИЗМЕЩЕНИЯ НАДВОДНОГО КОРАБЛЯ ПРИ ЕГО ШУМОПЕЛЕНГОВАНИИ | 2016 |
|
RU2645013C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ В ПАССИВНОЙ СИСТЕМЕ МОНИТОРИНГА | 2013 |
|
RU2526896C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ ОБЪЕКТОВ ГИДРОАКУСТИЧЕСКОЙ ПАССИВНОЙ СИСТЕМОЙ МОНИТОРИНГА | 2016 |
|
RU2655642C2 |
Изобретение относится к области гидроакустики и предназначено для отождествления объектов, обнаруженных несколькими гидроакустическими системами, находящимися на общем носителе. Изобретение может быть также использовано для отождествления объектов, обнаруженных разнородными системами радиоэлектронного вооружения, находящимися на общем носителе. В заявленном способе принимают сигнал объекта раздельно несколькими системами, находящимися на общем носителе, измеряют направление на объект раздельно в каждой системе, неоднократно принимают сигнал и неоднократно измеряют направление на объект в каждой системе. При каждом новом измерении направления на объект формируют новое значение разности между направлениями на объект в каждой паре систем, запоминают каждое новое значение разности, формируя очередной элемент массива совокупности наблюдений, определяют текущие среднее значение разности и дисперсию разности в совокупности наблюдений, принимают решение об отождествлении объектов в случае совместного выполнения условий: среднее значение разности и дисперсия разности менее порога. Технический результат - отождествление объектов на основании одного общего параметра - «направления» на объект, но с учетом двух характеристик объекта, достаточных для отождествления, а именно с учетом мгновенного местоположения объекта по углу и с учетом параметров его движения. При этом обеспечивается однозначность отождествления, и увеличивается его эффективность. 1 ил.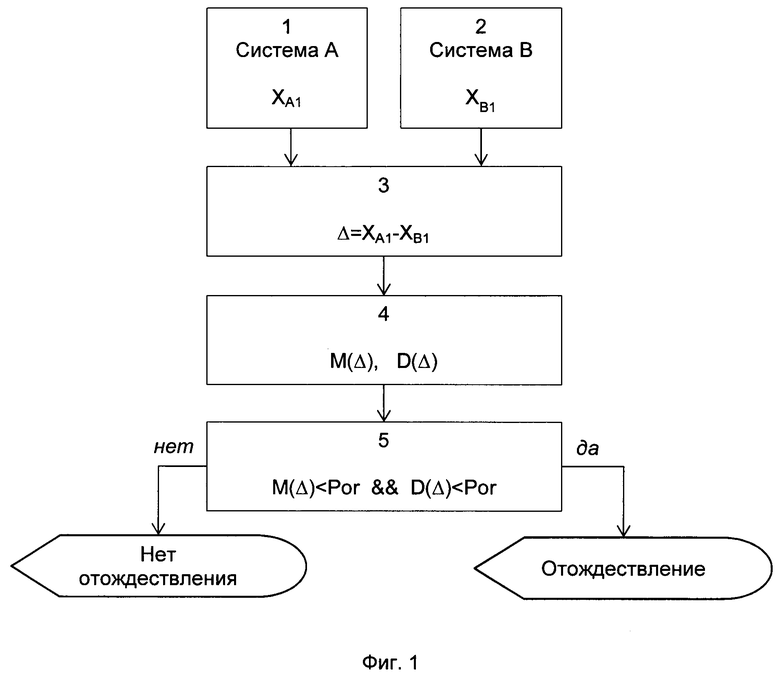
Способ отождествления объектов, обнаруженных несколькими системами, в котором неоднократно принимают сигналы объектов раздельно несколькими системами, находящимися на общем носителе, неоднократно измеряют направление на объекты раздельно в каждой системе, отличающийся тем, что формируют пары систем как каждая система с каждой, формируют пары объектов в каждой паре систем как каждый объект одной системы с каждым объектом парной системы, при каждом измерении направления на все объекты формируют значения разности между направлениями на объект для каждой пары объектов в каждой паре систем, запоминают полученные значения разностей, формируя очередной элемент массива совокупности измерений для каждой пары объектов в каждой паре систем, определяют текущие среднее значение разности и дисперсию разности в каждом массиве совокупности измерений, принимают решение об отождествлении для пары объектов пары систем в случае совместного выполнения условий: среднее значение разности и дисперсия разности менее порога, продолжают измерять направления на объекты и формировать массивы совокупности измерений для остальных пар объектов всех пар систем.
| Шейнман Е.Л | |||
| Алгоритмы оценки эффективности идентификации сигналов в многоканальной информационной системе // Гидроакустика | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| С | |||
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |
| СПОСОБ СТРОБОВОГО ОТОЖДЕСТВЛЕНИЯ СИГНАЛОВ С ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЯ В МНОГОЦЕЛЕВОЙ ОБСТАНОВКЕ | 2014 |
|
RU2557784C1 |
| Синусно-косинусный вращающийся трансформатор | 1989 |
|
SU1690108A1 |
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ В УГЛОМЕРНЫХ ДВУХПОЗИЦИОННЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2004 |
|
RU2253126C1 |
| Вентцель Е.С | |||
| Теория вероятностей | |||
| М.: Изд-во физ.-мат | |||
| литературы, 1962. | |||

