Изобретение относится к измерительной технике, применяемой в процессе проведения геофизических исследований нефтегазовых скважин автономными приборами, спускаемых на бурильных трубах при помощи канатной лебедки, и может быть использовано для бесконтактного определения угла поворота вала канатной лебедки и последующего вычисления глубины погружения автономных геофизических приборов.
Известен датчик оборотов вала лебедки, описанный в патенте RU 57819 U1 (МПК E21B 47/04; 2006 г.), который включает в себя магнитный модулятор, магниточувствительный элемент и блок электроники. Магнитный модулятор (блок магнитов) выполнен в виде двух полудисков, по периметру которых равномерно расположены постоянные магниты. В качестве магниточувствительного элемента (головки) использован, магниторезистивный элемент, выход которого подключен к сети CAN через блок обработки и согласования, включающий источник питания датчика, аппаратный CAN драйвер с элементами защиты от перенапряжений, микроконтроллер и световые индикаторы. Блок магнитов установлен на торце вала буровой лебедки, а магниточувствительная головка закреплена на защитном кожухе буровой лебедки с помощью скобы, позволяющей регулировать его положение относительно блока магнитов. Блок обработки и согласования размещен в герметичном металлическом корпусе и установлен на скобе, закрепленной на защитном кожухе буровой.
Недостатком полезной модели является сложность монтажа, связанная с использованием болтовых соединений на торце вала и креплением магниточувствительной головки на защитном кожухе буровой лебедки, требующими доработки конструкции буровой лебедки, что недопустимо для подъемно-транспортных машин, стоящих на учете в Ростехнадзоре. Кроме того, к недостаткам можно отнести разрешающую способность датчика, ограниченную числом постоянных магнитов магнитного модулятора и привязанность к внешнему источнику электропитания блока обработки и согласования, увеличивающую время монтажа датчика.
Известен оптический датчик контроля перемещения инструмента, описанный в патенте RU 198956 U1 (МПК G01F 3/36; СПК G01F 3/36; 2020г.), который включает в себя блок электроники, связанный с корпусом оптической головки, внутри которого смонтированы оптопара и на конце вала с возможностью вращения барабан, выполненный в виде полого цилиндра, с образованными по периметру периодически чередующимися между собой зубьями и щелями. Согласно полезной модели в корпусе оптической головки дополнительно смонтирована вторая оптопара, расположенная на печатной плате последовательно относительно первой оптопары. По периметру барабана образовано 25 зубьев и 25 чередующихся с ними щелей. Все щели равны между собой по ширине. Внешний конец вала снабжен посадочным местом для возможности установки на нем шкива. На посадочное место внешнего конца вала можно установить в зависимости от модификации контролируемого оборудования шкив под ремень или шкив под тросик. Вал оптической головки связан с валом контролируемого устройства с возможностью их синхронного вращения. Установка в оптической головке дополнительной оптопары позволяет удвоить количество рабочих импульсов, не прибегая к сложному модулированию сигналов при этом иметь на выходе два сигнала, характеризующие количество импульсов и направление вращения вала буровой лебедки. Импульсные сигналы в процессоре блока электроники оцифровываются и выдаются в программу верхнего уровня, как законченный материал для вычислений и регистрации. Датчик контроля перемещения инструмента устанавливают на стойке, входящей в комплект поставки, в непосредственной близости от вала лебедки со стороны установки тормозного вертлюжка. В разрыв вала лебедки и тормозного вертлюжка устанавливается шкив аналогичный шкиву оптической головки. Шкив на валу лебедки и шкив оптической головки связывают между собой ременной передачей.
Недостатками такой конструкции являются сложность монтажа, требующая жесткого крепления стойки датчика к кожуху буровой лебедки, привязанность к внешнему источнику электропитания, низкая достоверность результатов измерений из-за возможных проскальзываний на шкиве, растяжений и порывов передаточных ремней. Кроме того, подвижные части датчика в процессе эксплуатации подвержены износу и требуют постоянного технического обслуживания, что снижает эксплуатационные характеристики. Эти недостатки делают невозможным применение оптического датчика контроля перемещения инструмента для точного измерения угловых перемещений вала буровой лебедки и вычисления скорости перемещения талевого каната в полиспастную систему буровой установки для последующей привязки данных скважинных исследований к геологическому разрезу.
Наиболее близким техническим решением к предлагаемому является способ, описанный в патенте RU 2715769 C1 (МПК E21B 47/04, G01B 7/30; СПК E21B 47/04, G01B 7/30; 2019г.). Этот способ заключается в преобразовании угла поворота барабана буровой лебедки в пропорциональное количество импульсов с последующим пересчетом их в линейное перемещение талевого блока с помощью датчика контроля перемещения инструмента. Датчик контроля перемещения инструмента, включает в себя блок магнитов, выполненный в виде двух полуколец, по внешнему периметру которого равномерно расположены 12 постоянных магнитов и магниточувствительную головку, связанную кабелем с блоком электроники. Согласно изобретению, блок магнитов выполнен в виде браслета из полимерного материала, два полукольца которого с одной стороны подвижно связаны между собой соединительным элементом, а на открытых концах браслета расположена застежка для их фиксации. Датчик содержит набор проставок для возможности установки на разные по размеру диаметры вала лебедок. На плате магниточувствительной головки последовательно установлены три соленоида, при этом для согласования соленоидов с постоянными магнитами блока магнитов, продольные оси крайних соленоидов ориентированы к продольной оси центрального соленоида под углом 10°. Блок магнитов датчика контроля перемещения инструмента устанавливают на валы диаметром 230 мм., для установки на валы диаметров 190 мм. и 200 мм. применяются проставки, входящие в комплект датчика. Кронштейн с магниточувствительной головкой устанавливают на кожухе барабана буровой лебедки. Расстояние между блоком магнитов и магниточувствительной головкой при этом должно составлять от 1 до 5 мм.
Недостатками датчика контроля перемещения инструмента являются возможность установки блока магнитов только на определенный размерный ряд валов, необходимость крепления кронштейна с магниточувствительной головкой на кожухе барабана буровой лебедки, привязанность блока электроники к внешнему источнику питания и разрешающая способность датчика, ограниченная числом постоянных магнитов блока магнитов. Основным ограничением в применении датчика контроля перемещения инструмента является то, что парк буровых установок характеризуется многообразием конструкций лебедок, в результате чего не представляется возможным изготовление блока магнитов для всего размерного ряда валов. Кроме того, требуется жесткое и надежное крепление кронштейна с магниточувствительной головкой, что не предусмотрено в конструкции буровой лебедки и неизбежно приводит к дополнительным монтажным работам.
Технической проблемой, преодоление которой осуществляется путем создания технического решения, альтернативного известному решению, является расширение арсенала технических средств систем сбора геолого-технологической информации в процессе проведения геофизических исследований нефтегазовых скважин автономными приборами на бурильных трубах.
Техническим результатом, предлагаемого технического решения, является возможность его применения на всем парке буровых установок, не зависимо от диаметра вала лебедки, существенное сокращение времени монтажных работ, значительное увеличение разрешающей способности, достоверности результатов измерения и надежности.
Сущность предлагаемого технического решения заключается в следующем.
Для бесконтактного измерения угла поворота вала используют комплект из двух идентичных устройств, каждое из которых представляет собой независимую автономную микроконтроллерную систему, включающую в себя автономный источник электропитания, импульсный преобразователь напряжения, микроконтроллер с заданной программой, энергонезависимую память, преобразователь интерфейсов и, как минимум, двухосный высокочувствительный датчик линейного ускорения с ортогонально расположенными осями.
Заявляемое техническое решение характеризуется тем, что для измерения угла поворота вала в качестве чувствительного датчика применяется твердотельный акселерометр, представляющий собой микроэлектромеханическую систему (МЭМС-акселерометр), измеряющий проекцию ускорения (суперпозицию собственного ускорения акселерометра и вектора гравитации) на его чувствительную ось. Специалистам в данной области техники известно, что в настоящее время способ определения статического угла наклона (поворота) объекта, где в качестве чувствительного датчика применяется МЭМС-акселерометр (далее - акселерометр), повсеместно распространен в разных областях техники и зарекомендовал себя благодаря таким качествам, как миниатюрность, ударостойкость, вибростойкость, высокая чувствительность, стабильность, широкий диапазон рабочих температур и большая номенклатура выпускаемых промышленностью датчиков, однако, при динамических измерениях угла поворота вращающегося вала акселерометр необходимо размещать строго в центре вращения, иначе на датчик будут действовать дополнительные силы, обусловленные неравномерным движением тела по окружности и вносящие существенную погрешность в результаты измерений, но установить акселерометр в центр вращения вала буровой лебедки не представляется возможным в виду отсутствия доступа к торцу вала. Предлагаемое техническое решение, при установке комплекта устройств на внешней окружности вала, позволяет скомпенсировать действие дополнительных сил математическим методом и вычислить угол поворота вала с высокой разрешающей способностью и точностью.
Заявляемое техническое решение характеризуется тем, что каждое из устройств комплекта размещается в индивидуальном корпусе призматической конструкции, три грани которой, являющиеся основанием корпуса, соединены в виде выемки равнобедренной трапецеидальной формы, обеспечивающей самоцентрирование корпуса при установке на валы различных диаметров, в боковых гранях корпуса имеются сквозные отверстия для продевания зажимного хомута, в результате чего комплект устройств, закрепленных на вал посредством общего зажимного хомута образует единую кинематическую систему с валом, причем одна из осей чувствительности каждого акселерометра лежит на условной прямой, проходящей через центр вращения вала (совпадает с радиусом вала), вторая чувствительная ось, ортогональная первой, лежит на условной прямой, параллельной касательной к окружности вала.
Заявляемое техническое решение характеризуется тем, что при горизонтальном расположение вала буровой лебедки и его вращении, акселерометры устройств комплекта синхронно вращаются в плоскости действия силы гравитации Земли измеряя проекции вектора гравитации и собственного ускорения, обусловленного дополнительными силами, действующими на тело при неравномерном движении по окружности и вносящими существенную погрешность в измерение угла поворота вала, и в виду идентичности конструкции устройств комплекта, и способа их крепления на валу, дополнительные силы, действующие на разные акселерометры будут равны по амплитуде, благодаря чему появляется возможность скомпенсировать действие дополнительных сил математическим методом.
Существенными отличиями предлагаемого технического решения по отношению к альтернативному техническому решению являются:
- применение в качестве чувствительного датчика акселерометра;
- автономность устройств;
- универсальность конструкции и способа крепления устройств, обеспечивающие самоцентрирование корпуса и возможность установки на валы различных диаметров;
- отсутствие необходимости в креплении дополнительных чувствительных датчиков на кожухе лебедки.
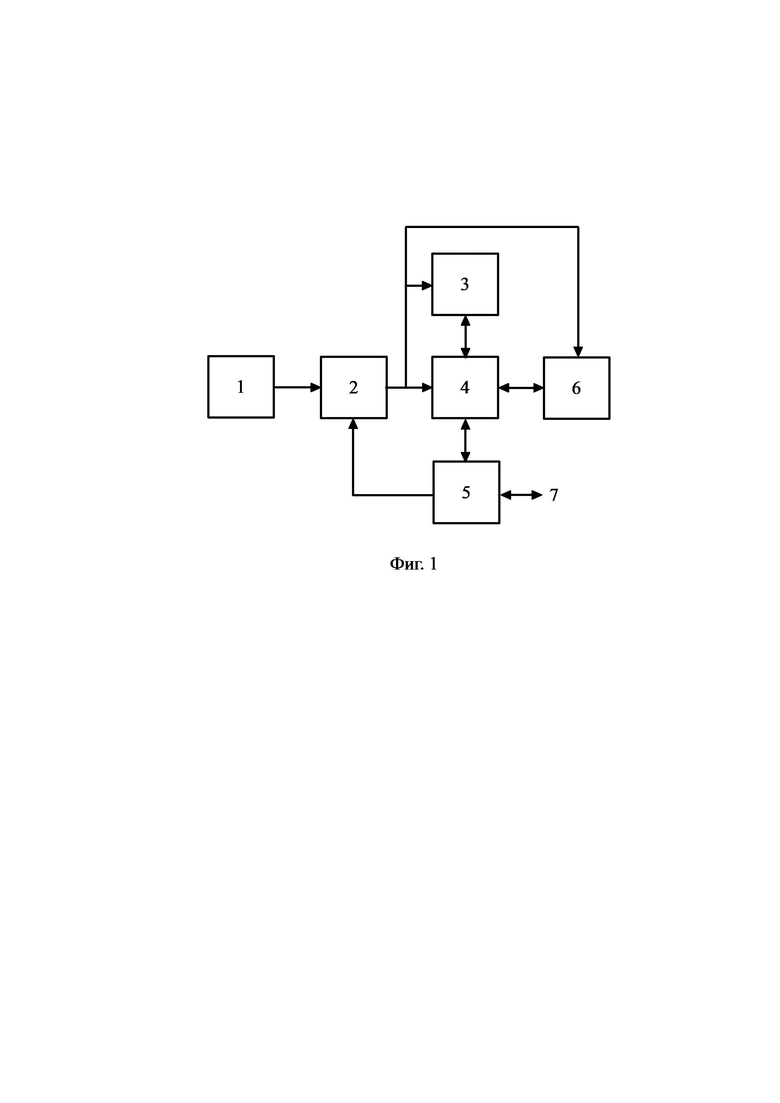
Заявляемое техническое решение поясняется фигурами. На фигуре 1 приведена структурная схема электронной платы устройства, на фигуре 2 приведен общий вид и монтажная схема установки комплекта устройств на валу, на фигурах 3 и 4 приведены упрощенные виды спереди монтажных схем установки комплекта устройств на валах различного диаметра, на фигуре 5 приведена условная схема движения по окружности двух акселерометров, изображенных в виде материальных точек (тел).
Заявляемое техническое решение осуществляют, например, следующим путем.
На фигуре 1 приведена структурная схема электронной платы заявляемого технического решения с указанием его отдельных узлов и электрических соединений, при этом стрелки указывают направление движения сигналов между узлами. В качестве автономного источника электропитания 1 может быть использован, например, литиевый элемент типоразмера АА, с номинальным напряжением 3,6 В. Преобразователь напряжения 2 представляет собой импульсный преобразователь напряжения, формирующий напряжение питания 3,3 В для отдельных узлов устройства. Для хранения измеренных параметров служит энергонезависимая память 3. Тактирование и управление работой узлов устройства осуществляется микроконтроллером 4. Для связи с персональным компьютером 7 (далее - ПК) предназначен преобразователь интерфейсов 5. В целях экономии емкости автономного источника питания 1 при подключении устройства к ПК предусмотрена подача питания на импульсный преобразователь напряжения 2 от USB-интерфейса ПК через преобразователь интерфейсов 5. В качестве чувствительного датчика 6 может быть использован, например, акселерометр ADXL357 фирмы Analog Devices [1].
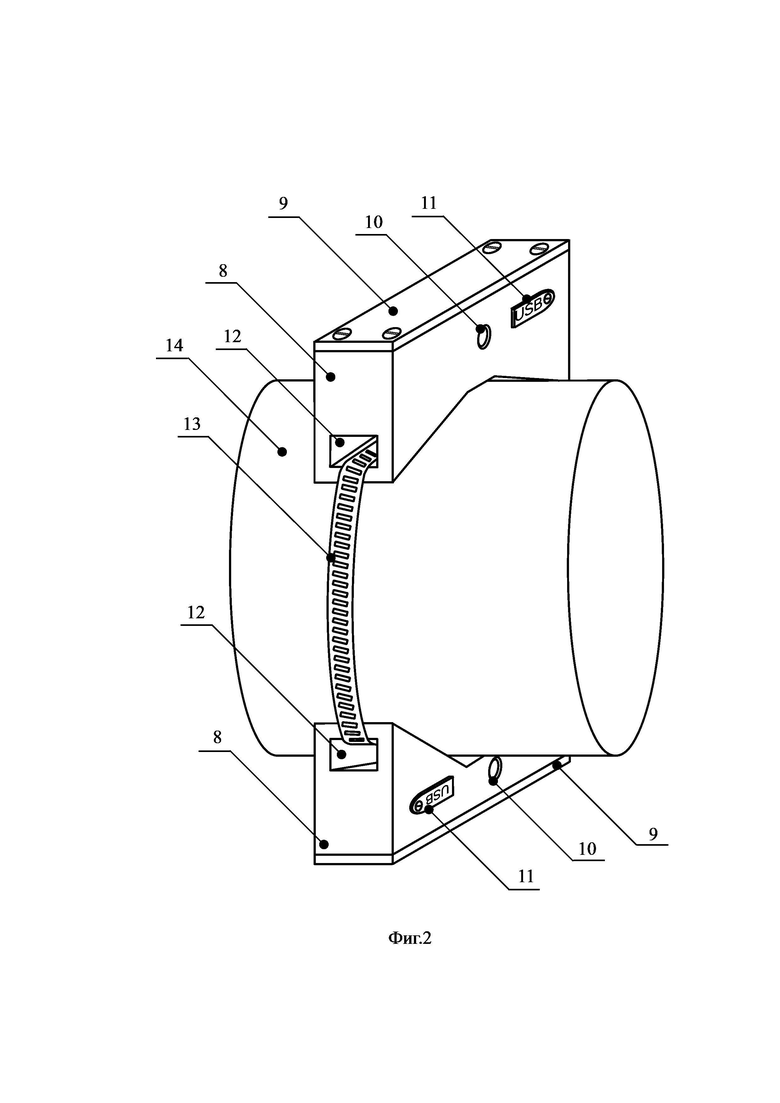
На фигуре 2 представлен общий вид и монтажная схема установки комплекта устройств на валу лебедки. Корпус 8 устройства может быть выполнен в виде призматической конструкции, три грани которой, являющиеся основанием корпуса, соединены в виде выемки равнобедренной трапецеидальной формы, обеспечивающей самоцентрирование корпуса при установке и креплении посредством зажимного хомута на валы различных диаметров. Внутри корпуса 8 расположена электронная плата и источник питания 1 (на фигуре 2 не обозначены). В верхней части корпуса 8 на четырех винтах закреплена герметичная крышка 9 для осуществления доступа к источнику питания 1 при необходимости его замены. На передней части корпуса 8 установлены световой индикатор 10 и защитная крышка USB-разъема 11, в боковой части имеется сквозное отверстие 12 для установки хомута 13. В качестве хомута может быть использован, например, зажимной хомут с червяком согласно ГОСТ 28191-89. Два идентичных устройства крепятся посредством общего зажимного хомута 13 на вал 14 и образуют с ним единую кинематическую систему. Конструкция корпуса 8 обеспечивает степень защиты IP64 от проникновения твердых предметов и воды в соответствии с ГОСТ 14254-2015.
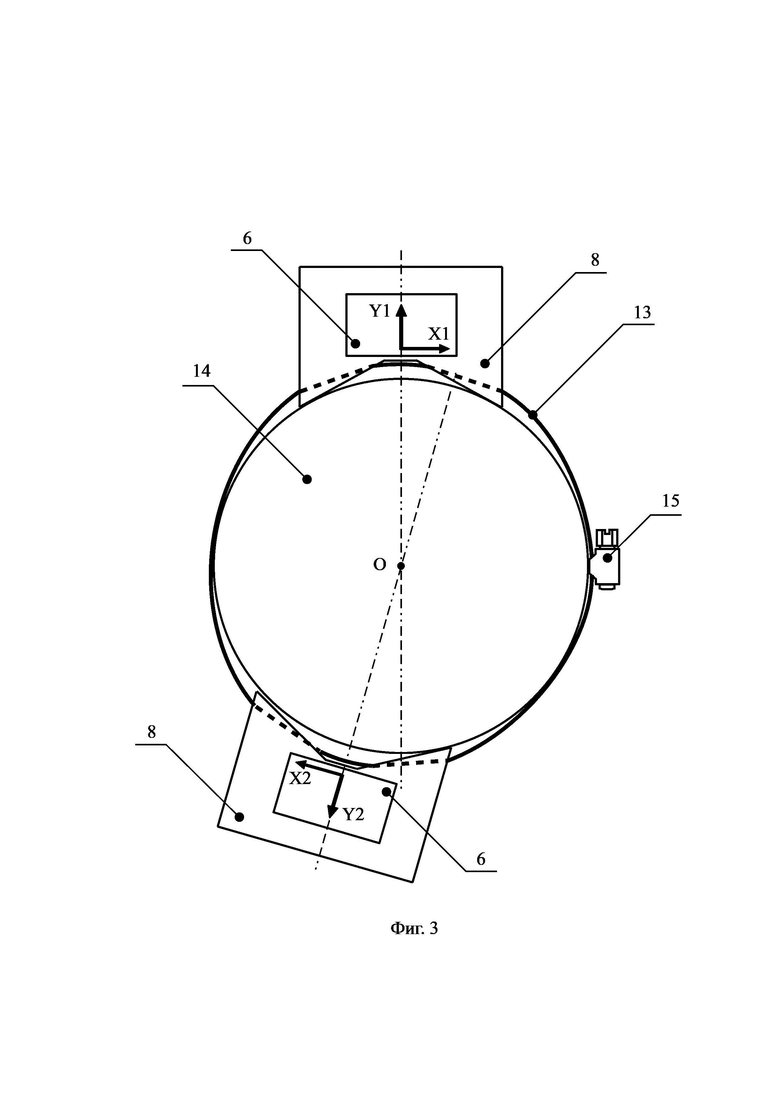
На фигурах 3 и 4 представлены упрощенные виды спереди монтажных схем установки комплекта устройств на валах различного диаметра. Часть прижимного хомута 13, проходящая через сквозное отверстие 12 в корпусе 8 показана пунктирной линией. Для стяжки хомута 13 используется червяк 15 согласно ГОСТ 28191-89. Внутри корпуса 8 каждого из устройств условно показано расположение акселерометра 6 с соответствующими ортогональными парами осей чувствительности X1, Y1 и X2, Y2. Специалистам в данной области техники будет понятно, что основание корпуса 8 в виде равнобедренной трапецеидальной выемки обеспечивает самоцентрацию на валах различного диаметра при креплении устройств посредством хомута 13, благодаря чему акселерометры 6 каждого из устройств находятся на равноудаленном расстоянии от центра вращения вала О, чувствительные оси акселерометров Y1 и Y2 лежат на условных прямых (на фигурах 3 и 4 обозначены штрих-пунктиром), проходящих через центр вращения вала О и совпадающих с его радиусом, а оси X1 и X2 лежат на условных прямых (на фигурах 3 и 4 не обозначены), параллельных касательным к внешней окружности вала 14.
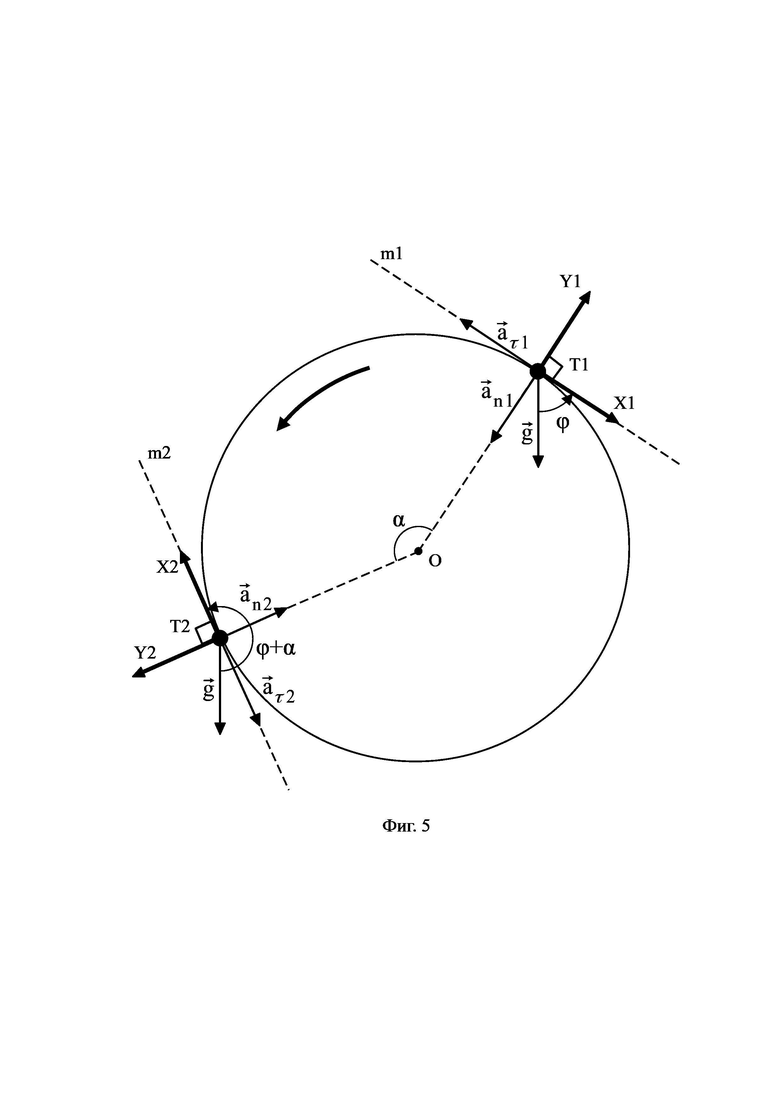
Согласно приведенным выше пояснениям и фигурам установленный на вал комплект устройств образует с ним единую кинематическую систему и синхронно вращается вместе с валом по общей траектории в виде окружности. На фигуре 5 представлена условная схема движения по окружности двух, изображенных в виде материальных точек (тел) T1 и T2, сдвинутых между собой по ходу движения на угол α, равноудаленных от центра вращения О акселерометров с ортогональными парами осей чувствительности X1, Y1 и X2, Y2, соответственно.
Из области физики известно, что ускорение тела, при его движении по окружности в плоскости действия гравитации Земли определяется, как векторная сумма ускорения свободного падения  и собственного ускорения, включающего нормальное (центростремительное) и тангенциальное (касательное) ускорения. Специалистам в данной области техники будет понятно, что, как показано на фигуре 5, конструкция и способ установки комплекта устройств на вал обеспечивают такое положение материальных точек T1 и T2 (акселерометров), при котором:
и собственного ускорения, включающего нормальное (центростремительное) и тангенциальное (касательное) ускорения. Специалистам в данной области техники будет понятно, что, как показано на фигуре 5, конструкция и способ установки комплекта устройств на вал обеспечивают такое положение материальных точек T1 и T2 (акселерометров), при котором:
- векторы нормального ускорения  лежат на осях Y1 и Y2, соответственно;
лежат на осях Y1 и Y2, соответственно;
- векторы тангенциального ускорения  совпадающие с касательными m1 и m2 к траектории движения, лежат на осях X1 и X2, соответственно;
совпадающие с касательными m1 и m2 к траектории движения, лежат на осях X1 и X2, соответственно;
- проекции векторов нормального ускорения  на оси Y1 и Y2 соответственно, и проекции векторов тангенциального ускорения
на оси Y1 и Y2 соответственно, и проекции векторов тангенциального ускорения  на оси X1 и X2 соответственно, равны абсолютным значениям (модулям) этих же векторов;
на оси X1 и X2 соответственно, равны абсолютным значениям (модулям) этих же векторов;
- проекции векторов нормального ускорения  на оси X1 и X2 соответственно, и проекции векторов тангенциального ускорения
на оси X1 и X2 соответственно, и проекции векторов тангенциального ускорения  на оси Y1 и Y2 соответственно, равны нулю;
на оси Y1 и Y2 соответственно, равны нулю;
- модули векторов нормального ускорения  равны между собой;
равны между собой;
- модули векторов тангенциального ускорения  равны между собой.
равны между собой.
Специалистам в данной области техники будет понятно, что при вращении вала угол ϕ между осью X1 и вектором ускорения свободного падения будет изменяться в соответствии с углом поворота вала. В свою очередь, угол между осью X2 и вектором ускорения свободного падения , так же будет изменяться в соответствии с углом поворота вала, но из-за сдвига акселерометров на угол α его значение будет равно ϕ плюс α. Таким образом, зная угол ϕ между осью X1 и вектором ускорения свободного падения можно вычислить угол поворота вала Δφ по формуле:

где  - угол поворота вала в дискретный момент времени i;
- угол поворота вала в дискретный момент времени i;
 - угол между осью X1 акселерометра и вектором ускорения свободного падения в дискретный момент времени i;
- угол между осью X1 акселерометра и вектором ускорения свободного падения в дискретный момент времени i;
 - угол между осью X1 акселерометра и вектором ускорения свободного падения в дискретный момент времени i минус 1.
- угол между осью X1 акселерометра и вектором ускорения свободного падения в дискретный момент времени i минус 1.
На основании выше сказанного и формул элементарной геометрии, а также учитывая направление вращения, выражения для определения результирующих сумм векторных проекций ускорений AX1, AY1, AX2 и AY2 на соответствующие оси акселерометров X1, Y1, X2 и Y2 можно записать в следующем виде:
где g – абсолютное значение ускорения свободного падения.
Вычитая (4) из (2), и (5) из (3), и учитывая равенство модулей соответствующих векторов нормального и тангенциального ускорений, можно получить систему уравнений, не зависящую от нормального и тангенциального ускорений:
Решив систему тригонометрических уравнений (6)-(7) можно найти выражение для вычисления угла φ:

Подставив выражение (8) в (1), можно получить выражение для вычисления угла поворота вала, не зависящее от угла α:

где – угол поворота вала в дискретный момент времени i;
 - значения результирующих сумм проекций ускорений на соответствующие оси X1 и Y1 первого акселерометра в дискретный момент времени i;
- значения результирующих сумм проекций ускорений на соответствующие оси X1 и Y1 первого акселерометра в дискретный момент времени i;
 - значения результирующих сумм проекций ускорений на соответствующие оси X2 и Y2 второго акселерометра в дискретный момент времени i;
- значения результирующих сумм проекций ускорений на соответствующие оси X2 и Y2 второго акселерометра в дискретный момент времени i;
 - значения результирующих сумм проекций ускорений на соответствующие оси X1 и Y1 первого акселерометра в дискретный момент времени i минус 1;
- значения результирующих сумм проекций ускорений на соответствующие оси X1 и Y1 первого акселерометра в дискретный момент времени i минус 1;
 - значения результирующих сумм проекций ускорений на соответствующие оси X2 и Y2 второго акселерометра в дискретный момент времени i минус 1.
- значения результирующих сумм проекций ускорений на соответствующие оси X2 и Y2 второго акселерометра в дискретный момент времени i минус 1.
Из области физики известно, что выражения (2)-(5) представляют собой гармонические когерентные колебания, поэтому результирующие выражения (6)-(7) так же являются гармоническими когерентными колебаниями, амплитуда которых зависит от разности фаз вычитаемых колебаний. Специалистам в данной области техники будет понятно, что снижение амплитуды результирующих функций (6)-(7) может привести к снижению разрешающей способности предлагаемого способа измерения угла поворота вала. Аналитическим методом, подставляя значения угла α в выражения (6)-(7) и выполняя тригонометрические преобразования, можно оценить влияние величины угла сдвига устройств на амплитуду результирующих функций (6)-(7).
При максимально возможном значении угла α, равном 180°, выражения (6)-(7) будут иметь следующий вид:

При снижении значения угла α до 60° выражения (6)-(7) примут следующий вид:

Анализируя выражения (2)-(5) и (10)-(13), можно сделать следующие выводы:
- при угле α, равном 180°, амплитуда результирующих функций (6)-(7) будет в два раза больше амплитуды исходных функций (2)-(5);
- при угле α, равном 60°, амплитуда результирующих функций (6)-(7) будет равна амплитуде исходных функций (2)-(5);
- при уменьшении значения угла α амплитуда результирующих функций (6)-(7) уменьшается, и при угле α, равном 0°, результирующие функции (6)-(7) будут равны нулю. Однако, учитывая конструкцию и способ установки комплекта устройств на вал, угол между устройствами α, не может быть равен 0°.
Таким образом, для обеспечения разрешающей способности предложенного способа измерения угла поворота вала, не хуже, чем разрешающая способность применяемого акселерометра, угол между устройствами комплекта при установке на вал должен быть не менее 60°, что можно обеспечить визуально, без применения дополнительных измерительных средств.
Типовая разрешающая способность (чувствительность) акселерометра ADXL357 фирмы Analog Devices достигает 78μg [1], что соответствует, примерно 0,014° и многократно превышает возможности известных устройств, предназначенных для измерения угла поворота вала буровой лебедки. Для сравнения - оптический датчик контроля перемещения инструмента, описанный в патенте RU 198956 U1 (МПК G01F 3/36; СПК G01F 3/36; 2020г.) характеризуется 50 дискретными точками измерения на один оборот вала, что соответствует разрешающей способности в 7,2°, датчик контроля перемещения инструмента описанный в патенте RU 2715769 C1 (МПК E21B 47/04, G01B 7/30; СПК E21B 47/04, G01B 7/30; 2019г.) характеризуется 36 дискретными точками измерения на один оборот вала, что соответствует разрешающей способности в 10°.
Измерение угла поворота вала буровой лебедки производят следующим образом. В батарейные отсеки корпуса 8 каждого из устройств комплекта, расположенные под крышкой 9, устанавливают автономный источник питания 1. Посредством кабеля через USB-разъем, находящийся под защитной крышкой 11, устройства комплекта поочередно подключают к USB-интерфейсу ПК. В момент подключения на импульсный преобразователь напряжения 2 через преобразователь интерфейсов 5 поступает напряжение питания 5 В USB-интерфейса ПК. Импульсный преобразователь напряжения 2 вырабатывает напряжение 3,3 В, которое подается на микроконтроллер 4, энергонезависимую память 3 и акселерометр 6. После подачи напряжения 3,3 В на микроконтроллер 4 происходит его внутренняя инициализация, загорается световой индикатор режимов работы 10 и в импульсный преобразователь напряжения 2 подается напряжение автономного источника питания 1. Посредством программы верхнего уровня внутренние часы комплекта устройств поочередно синхронизируют с часами реального времени ПК, устанавливают время начала записи и время завершения работы, производят стирание энергонезависимой памяти 3. Световой индикатор режимов работы 10 начинает мигать с частотой один раз в три секунды. Затем, последовательно, в корпус 8 каждого из датчиков, через сквозные отверстия 12 продевают общий хомут 13, и комплект устройств устанавливают в доступном месте на валу 14 буровой лебедки. Для достижения наилучшей чувствительности, не хуже чувствительности применяемого акселерометра, устройства комплекта размещают на валу 14 таким образом, чтобы угол α между ними находился в диапазоне от 60° до 180°, что достижимо без применения дополнительных технических измерительных средств, после чего хомут 13 затягивают посредством червяка 15 согласно ГОСТ 28191-89.
При достижении установленного времени включения записи микроконтроллер 4 выполняет инициализацию акселерометра 6 и энергонезависимой памяти 3. После инициализации акселерометр 6 каждого из устройств начинает выполнять измерения результирующих сумм векторных проекций ускорений AX1, AY1, и AX2, AY2 с заданной частотой и передавать их в микроконтроллер 4 для записи в энергонезависимую память 3. Индикатор 10 начинает мигать с частотой один раз в две секунды. При вращении вала 14 результирующие суммы векторных проекций ускорений AX1, AY1, AX2 и AY2 изменяются в зависимости от угла поворота вала Δφ.
При достижении установленного времени выключения преобразователь напряжения 2 выключается, индикатор 10 гаснет. По окончанию работ червяк 15 хомута 13 ослабляют и комплект устройств демонтируют с вала 14. Посредством кабеля через USB-разъем, находящийся под защитной крышкой 11, устройства поочередно подключают к USB-интерфейсу ПК. В момент подключения на преобразователь напряжения 2 через преобразователь интерфейсов 5 поступает напряжение питания 5 В USB-интерфейса ПК. Преобразователь напряжения 2 вырабатывает напряжение 3,3 В, которое подается на микроконтроллер 4, энергонезависимую память 3 и акселерометр 6. После подачи напряжения 3,3В на микроконтроллер 4 происходит его внутренняя инициализация и загорается световой индикатор режимов работы 10. Посредством программы верхнего уровня микроконтроллер 4 передает информацию из энергонезависимой памяти 3 в ПК через USB-интерфейс, где согласно заданному математическому алгоритму вычисляется угол поворота вала в каждый дискретный момент времени i по формуле (9).
Предлагаемое техническое решение, при использовании его в системах сбора геолого-технологической информации в процессе проведения геофизических исследований нефтегазовых скважин автономными приборами на бурильных трубах обладает, по сравнению с известными аналогами, следующими преимуществами:
- возможность применения на всем парке буровых установок, не зависимо от диаметра вала лебедки;
- сокращение времени монтажа за счет универсальности конструкции и способа крепления на валу;
- сокращение времени монтажа за счет исключения дополнительных работ по установке чувствительных датчиков на кожухе лебедки;
- сокращение времени монтажа за счет автономности и устранения необходимости прокладки питающих кабелей;
- высокая разрешающая способность и достоверность результатов измерения за счет использования высокочувствительных и стабильных датчиков;
- высокая надежность за счет отсутствия деталей, подверженных механическому износу.
Предлагаемое техническое решение соответствует изобретательскому уровню и является новым поскольку указанные признаки не следуют явным образом из уровня техники, и не выявлены ни в одном из известных источников информации.
Предлагаемое техническое решение является промышленно применимым поскольку его можно использовать в системах сбора геолого-технологической информации в процессе проведения геофизических исследований нефтегазовых скважин автономными приборами на бурильных трубах.
Использованные источники
1. www.analog.com.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ СКВАЖИНЫ | 2001 |
|
RU2206737C1 |
| Способ краткосрочного прогнозирования землетрясений | 2023 |
|
RU2812095C1 |
| Способ определения параметров ожидаемого землетрясения | 2023 |
|
RU2839290C1 |
| СПОСОБ СКВАЖИННОЙ ИНКЛИНОМЕТРИИ И СКВАЖИННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2770874C1 |
| Датчик контроля перемещения инструмента | 2019 |
|
RU2715769C1 |
| УСТОЙЧИВЫЙ К МЕХАНИЧЕСКИМ УДАРАМ УЗЕЛ МЭМС-АКСЕЛЕРОМЕТРА И СВЯЗАННЫЕ С НИМ СПОСОБ, УСТРОЙСТВО И СИСТЕМА | 2015 |
|
RU2673777C2 |
| ИЗМЕРИТЕЛЬ УГЛОВОГО ПОЛОЖЕНИЯ ИЗДЕЛИЯ | 2011 |
|
RU2491507C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1991 |
|
RU2046289C1 |
| Измеритель объема жидкости | 2021 |
|
RU2767475C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАНИЯ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2011 |
|
RU2481593C9 |

Изобретение относится к измерительной технике, применяемой в процессе проведения геофизических исследований нефтегазовых скважин автономными приборами, и может быть использовано для бесконтактного определения угла поворота вала канатной лебедки. Техническим результатом изобретения является возможность его применения на всем парке буровых установок, независимо от диаметра вала лебедки. Для бесконтактного измерения угла поворота вала используют комплект из двух идентичных устройств, устанавливаемых посредством общего зажимного хомута на внешней окружности вала. В качестве чувствительного датчика устройства применяют акселерометр. Основание корпуса устройства выполняют в виде выемки равнобедренной трапецеидальной формы, обеспечивающей его самоцентрирование при установке на валы различных диаметров, благодаря чему дополнительные силы, действующие на чувствительные датчики и вносящие погрешности в измерения, равны между собой и могут быть скомпенсированы математическим методом. 2 н.п. ф-лы, 5 ил.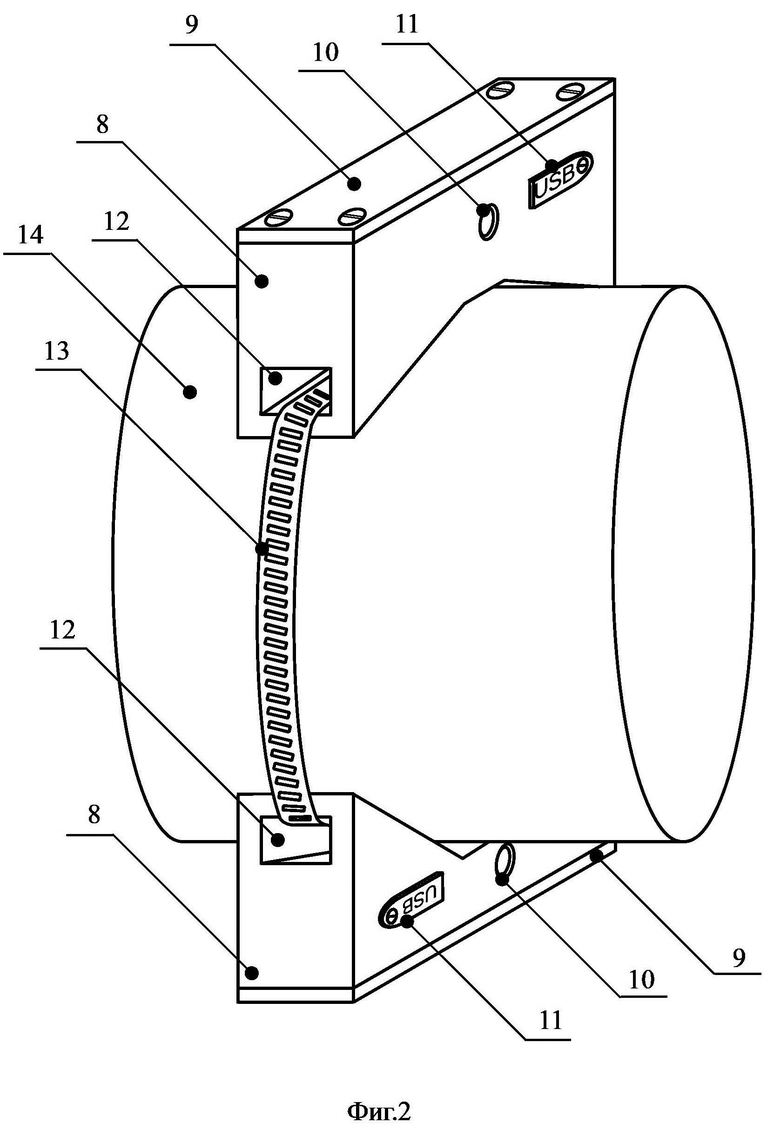
1. Способ измерения угла поворота вала, включающий в себя установку на внешней окружности вала, на равноудаленном от центра вращения расстоянии комплекта из двух идентичных устройств, отличающийся тем, что в качестве чувствительного датчика каждого из указанных устройств применяют акселерометр, ось чувствительности Y которого лежит на условной прямой, проходящей через центр вращения вала, вторая чувствительная ось X, ортогональная первой, лежит на условной прямой, параллельной касательной к окружности вала, при этом угол поворота вала вычисляют по формуле

где  - угол поворота вала в дискретный момент времени i;
- угол поворота вала в дискретный момент времени i;
 ,
,  - значения результирующих сумм проекций ускорений на соответствующие оси X1 и Y1 первого акселерометра в дискретный момент времени i;
- значения результирующих сумм проекций ускорений на соответствующие оси X1 и Y1 первого акселерометра в дискретный момент времени i;
 ,
,  - значения результирующих сумм проекций ускорений на соответствующие оси X2 и Y2 второго акселерометра в дискретный момент времени i;
- значения результирующих сумм проекций ускорений на соответствующие оси X2 и Y2 второго акселерометра в дискретный момент времени i;
 ,
,  - значения результирующих сумм проекций ускорений на соответствующие оси X1 и Y1 первого акселерометра в дискретный момент времени i минус 1;
- значения результирующих сумм проекций ускорений на соответствующие оси X1 и Y1 первого акселерометра в дискретный момент времени i минус 1;
 ,
,  - значения результирующих сумм проекций ускорений на соответствующие оси X2 и Y2 второго акселерометра в дискретный момент времени i минус 1.
- значения результирующих сумм проекций ускорений на соответствующие оси X2 и Y2 второго акселерометра в дискретный момент времени i минус 1.
2. Комплект устройств для измерения угла поворота вала, содержащий два идентичных устройства, устанавливаемых на внешней окружности вала посредством общего зажимного хомута, отличающийся тем, что:
каждое из указанных устройств представляет собой независимую автономную микроконтроллерную систему, состоящую из автономного источника электропитания, импульсного преобразователя напряжения, микроконтроллера с заданной программой управления, энергонезависимой памяти, преобразователя интерфейсов и акселерометра, как минимум с двумя ортогонально расположенными осями;
основание корпуса каждого из указанных устройств выполнено в виде выемки равнобедренной трапецеидальной формы, обеспечивающей равноудаленное положение от центра вращения вала и самоцентрацию при установке на валы различных диаметров.
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА | 2009 |
|
RU2413177C1 |
| Способ измерения угла поворота и устройство для его осуществления | 1984 |
|
SU1247646A1 |
| Устройство для двухотсчетного измерения временных интервалов с преобразованием их в цифровой код | 1959 |
|
SU122770A1 |
| US 10976150 B2, 13.04.2021 | |||
| US 10276289 B1, 30.04.2019. | |||

