Изобретение относится к контрольно- измерительной технике и может быть использовано для измерения угла поворота между двумя связаиными объектами, образующими кинематическую пару.
Цель изобретения - измерение угла поворота между двумя связанными объектами, образующими кинематическую пару, и расширение динамического диапазона измерения в сторону низких частот, вплоть до нулевых. Известный способ измерения углов поворота основан на двойном интегрирований показаний преоф)$з ователя угловых ускорений, связываемого в процессе измерений с контролируемым объектом.
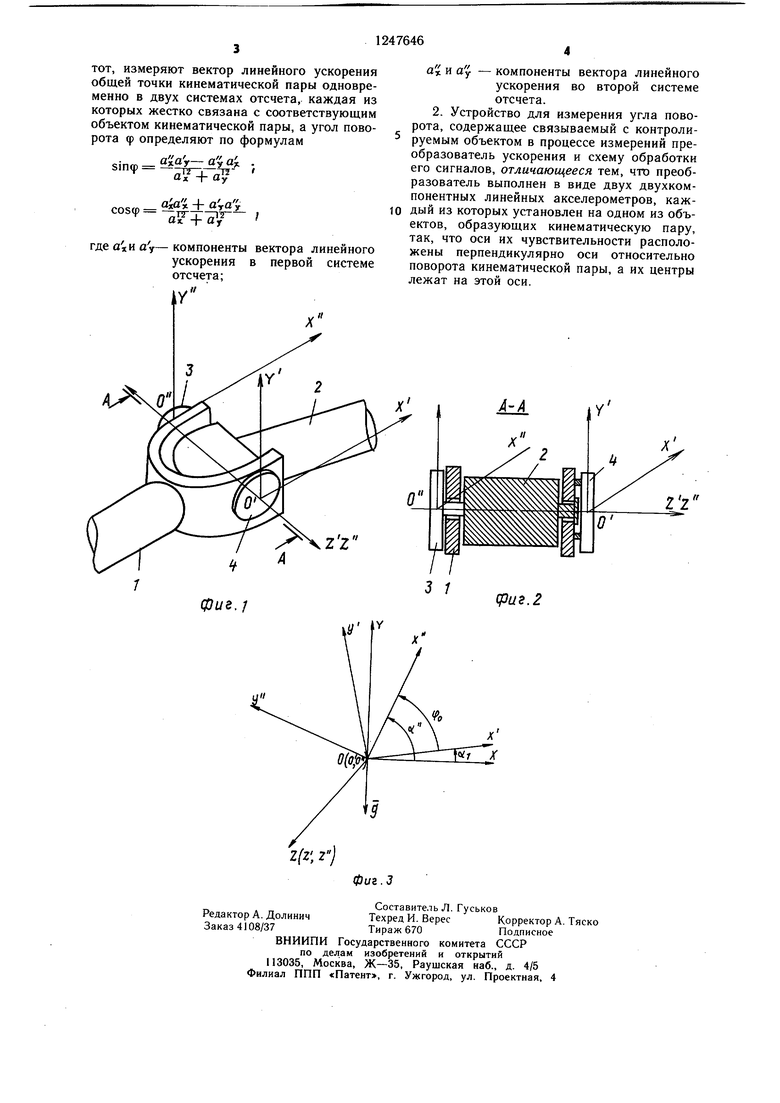
На фиг. 1 представлено устройство, реализующее предложенный способ; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - схема двух систем отсчета, связываемых с контролируемым объектом.
Устройство, реализующее способ (фиг. 1 и 2), содержит два кинематически связанных объекта 1 и 2, образующих кинематическую пару, и два двухкомпонентных линейных акселерометра 3 и 4, каждый из которых жестко связан с соответствующим объектом этой пары и схемой обработки сигналов (не показан), с помощью которой осуществляются математические вычисления контролируемого угла.
Реализуемый с помощью предложенного устройства способ измерения угла поворота заключается в том, что в образованной двумя кинематически связанными объектами вращательной паре производят измерение вектора линейного ускорения общей точки этой пары, лежащей на оси относительного поворота, одновременно в двух жестко связанных с соответствующими объектами этой пары системах отсчета с (о х у ) и с () и на основании имеющих место связей между компонентами вектора линейного ускорения при повороте систем отсчета на угол ф последний определяют по формулам
а ха у-а иа х
31Пф
а а х+аУа у
СОЗф )Y.-w аг+а
Формула (1) основана на известных соотношениях
а а лгсозф + а у sintp ;
(2) а у а х siny + а у созф,
позволяющих для произвольного вектора а, заданного в некоторой (старой) системе отсчета о х у компонентами {а х; а у}, найти компоненты этого же вектора в новой системе отсчета (, повернутой относительно о х у на угол ф.
В данном способе в качестве вектора а выбирается вектор ускорения точки О -
общей точки плоской вращательной пары кинематически связанных объектов, который одновременно измеряется двумя двухкомпо- нентными акселерометрами, каждый из которых жестко связан с соответствующим объ ектом этой пары. Измерительными осями этих двух акселерометров приборно реализуются упомянутые системы координат о х у и .
Устройство работает следующим образом.
10 Каждый из двухкомпонентных .акселерометров (например, может быть использован двухкомпонентный струнный акселерометр 3) жестко крепится на соответствующем объекте пары I и 2 таким образом, что его оси чувствительности (о у , о х, , )
5 перпендикулярны оси этой пары (o z , ), а центр лежит на этой оси. Указанные двух- компонентные акселерометры приборно реализуют две системы отсчета с и с, повернутые одна относительно другой на угол ф,
2Q совпадающий с углом между объектами пары, ось (o z ) при этом является общей и совпадает с осью пары. По измеренным посредством акселерометров компонентам вектора а (линейного ускорения общей точки О) в каждой из систем отсчета с и с -
25 а х, а у} и , а у} соответственно в схеме обработки осуществляется расчет 81пф и cos ф по приведенным формулам (1).
Условие а х + а у + может использоваться для контроля отказов и грубых промахов данной измерительной
30 системы.
Ускорение точки О не связано непосредственно ни с самим углом ф, ни с его изменениями, а определяется характером движения самой этой точки. Более того, в силу принципа своего действия акселеро.метр
3 всегда измеряет сумму а о + Я- где о - ускорение точки относительно Земли; g - вектор ускорения силы тяжести. Это озна- 4aet, что устройство работоспособно и при неподвижной относительно Земли точке О
40 (при о о + а g).
Способ и устройство работоспособны как в динамике, так и в статике и позволяют определять фактическое значение относительного угла ф взаимного поворота объектов пары как в случае меняющихся значений
45 углов ф, так и в случае его установившегося значения, за счет чего расширяется динами- -ческий диапазон контролируемых углов.
50
Формула изобретения
. Способ измерения угла поворота, заключающийся в том, что измеряют ускорение, по величине которого определяют искомый параметр, отличающийся тем, что, с 55 целью измерения угла поворота между двумя связанными объектами, образующими кинематическую пару, и расширения динамического диапазона в сторону низних частот, измеряют вектор линейного ускорения общей точки кинематической пары одновременно в двух системах отсчета, каждая из которых жестко связана с соответствующим объектом кинематической пары, а угол поворота ф определяют по формулам
a ia y- a ir а
12
У
а / + аТ
.о.„ aia i + aVa J
С05ф--т -р- компоненты вектора линейного ускорения в первой системе отсчета;
У
л
U
a i и Оу - компоненты вектора линейного ускорения во второй системе отсчета.
2. Устройство для измерения угла поворота, содержащее связываемый с контроли- руемым объектом в процессе измерений преобразователь ускорения и схему обработки его сигналов, отличающееся тем, что преобразователь выполнен в виде двух двухком- понентных линейных акселерометров, каж- дый из которых установлен на одном из объектов, образующих кинематическую пару, так, что оси их чувствительности расположены перпендикулярно оси относительно поворота кинематической пары, а их центры лежат на этой оси.
У
фиг.З
Составитель Л. Гуськов
Редактор А. ДолиничТехред И. ВересКорректор А. Тяско
Заказ 4108/37Тираж 670Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4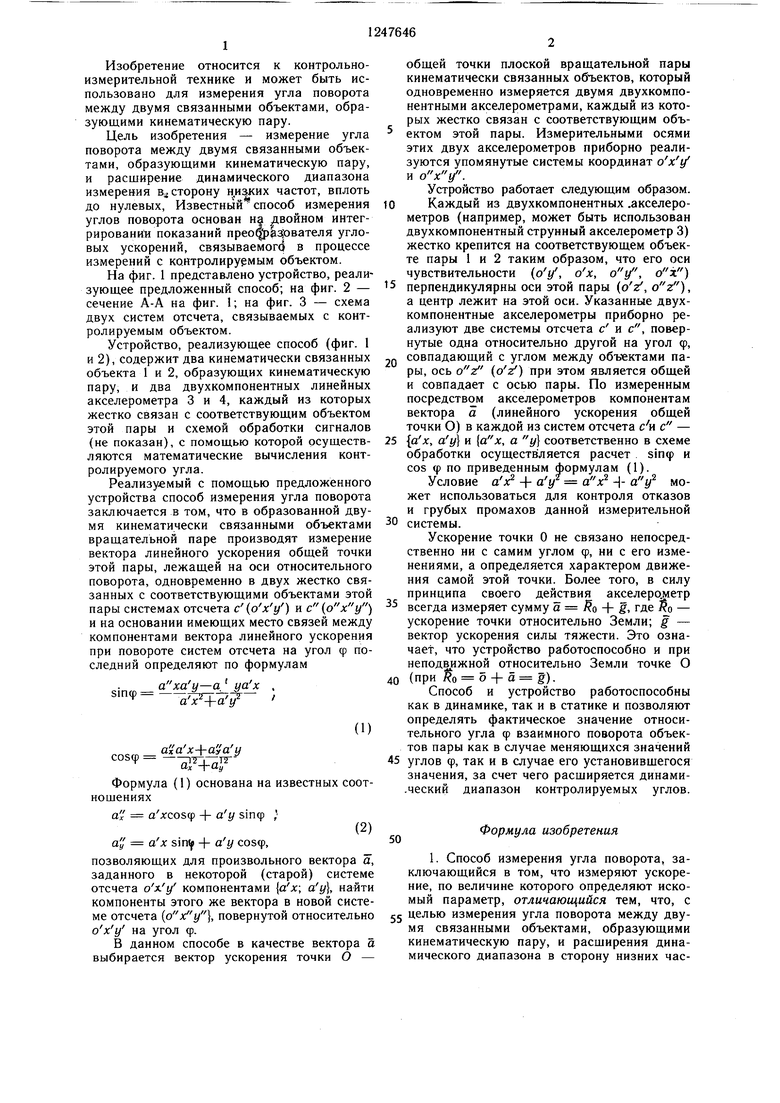
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРА, ХАРАКТЕРИЗУЮЩЕГО СОСТОЯНИЕ СИСТЕМЫ КОЛЕСО - РЕЛЬС, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2061610C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОТРОН | 2008 |
|
RU2403537C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2319157C1 |
| СПОСОБ И УСТРОЙСТВО ПОСТРОЕНИЯ НЕВОЗМУЩАЕМОЙ БЕЗГИРОСКОПНОЙ ВЕРТИКАЛИ | 2002 |
|
RU2258907C2 |
| ЗАЩИЩЕННЫЙ СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ | 2019 |
|
RU2713584C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2306529C2 |
| СПОСОБ КАЛИБРОВКИ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2004 |
|
RU2269813C2 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
| Способ измерения магнитного курса подвижного объекта | 2024 |
|
RU2831224C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2004 |
|
RU2257546C1 |
Изобретение относится к контрольно- измерительной технике и может быть использовано для измерения угла поворота между двумя связанными объектами, образующими кинематическую пару. Цель изобретения - расширение динамического диапазона измерений способа измерения угла поворота и реализующего его устройства в сторону низких частот. Устройство для измерения угла поворота содержит два двухкомпонентных линейных акселерометра и схему обработки их сигналов для вычисления угла поворота. Каждый из двухкомпонентных акселерометров установлен на одном из объектов, образующих кинематическую пару, так, что оси его чувствительности расположены перпендикулярно оси относительного поворота кинематической пары, а центр лежит на этой оси. Реализуемый с помощью этого устройства способ заключается в том, что на основе измеренных в двух системах отсчета, жестко связанных с объектами четырех компонент вектора линейного ускорения общей точки кинематической пары определяют с помощью приведенных математических соотнощений угол между системами отсчета, соответствующий углу между кинематически связанными объектами. 2 с. п. ф-лы, 3 ил. « (Л го 4 vl О5 4 Од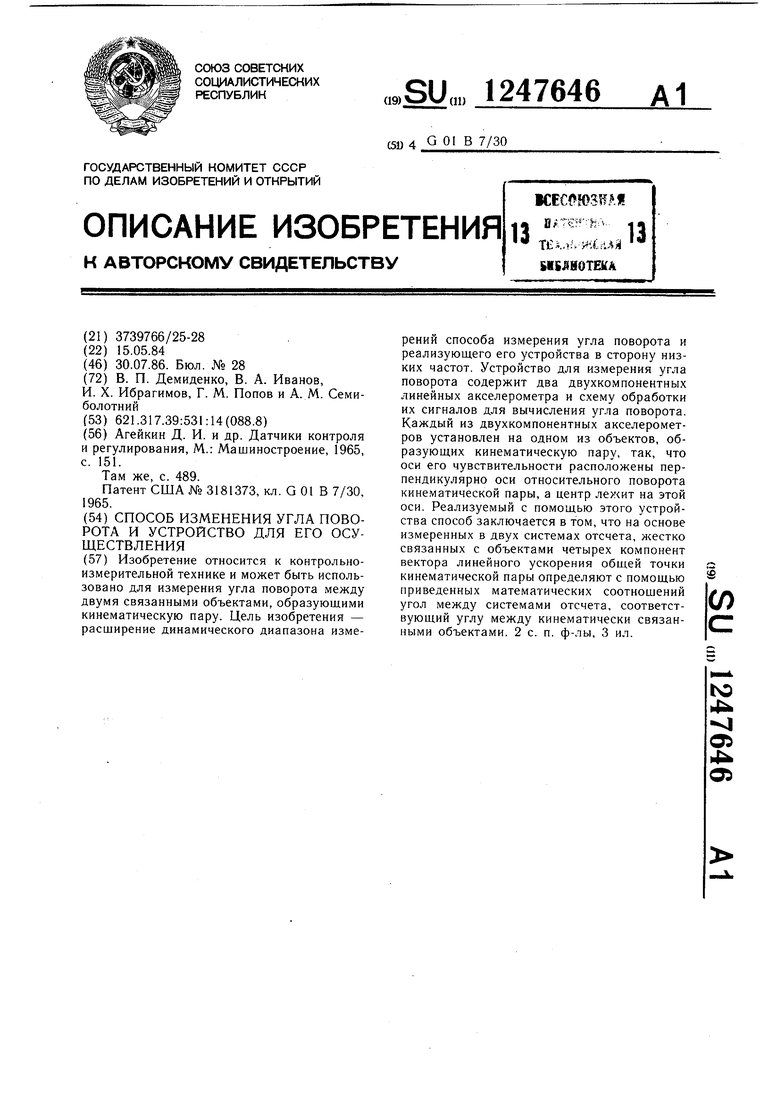
| Агейкин Д | |||
| И | |||
| и др | |||
| Датчики коитроля и регулирования, М.: Машиностроение, 1965, с | |||
| Двухколейная подвесная дорога | 1919 |
|
SU151A1 |
| Там же, с | |||
| Подставка для настольных электрических ламп | 1923 |
|
SU489A1 |
| Патент США № 3181373, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Опорная тележка для канатных транспортеров | 1924 |
|
SU965A1 |
