Изобретение относится к области автоматики и может быть использовано при определении угловой ориентации трехосного гиростабилизатора (ТГС) относительно базового объекта.
Известен способ измерения угла поворота вала, в котором угол преобразуют в два электрических сигнала переменного тока, модулированных соответственно в функции синуса и косинуса угла поворота, определяют перед началом измерения в равномерно расположенных на периоде модулирующего сигнала угловых положениях сумму квадратов амплитуд синусного и косинусного сигналов, находят их среднее арифметическое значение, определяют параметры (амплитуду и фазу) спектра пространственных гармоник погрешности и запоминают их, а в процессе измерения из угловых значений, полученных в виде арктангенса отношения амплитуд модулирующих синусного и косинусного сигналов, вычитают погрешность, сформированную по запомненным параметрам спектра погрешностей [1].
Измерение погрешностей в известном способе производится на одном периоде модулирующего сигнала с последующей обработкой результатов путем дискретного преобразования Фурье. Известный способ не позволяет выявить и скомпенсировать погрешности, гармонические составляющие которых не кратны периоду модулирующего сигнала.
Наиболее близким техническим решением к данному изобретению является способ измерения угла поворота вала, в котором угол преобразуют в основной и дополнительный электрические сигналы с одинаковыми угловыми эквивалентами в виде скважности широтно-импульсных модулированных (ШИМ) сигналов, формируют из них разностный сигнал в равномерно расположенных угловых положениях вала во всем диапазоне измерения угла (360°), определяют параметры спектра погрешностей основного сигнала в виде амплитуды и фазы соответствующих гармоник спектра разностного сигнала, запоминают параметры спектра погрешностей основного сигнала, формируют для любого текущего значения основного сигнала (при эксплуатации) поправку по запомненным значениям и корректируют угловой эквивалент основного сигнала [2].
При реализации известного способа каждый из датчиков, преобразующих угол поворота в основной и дополнительный электрические сигналы, может быть выполнен в виде последовательно соединенных индукционного редуктосина (ИР), преобразователя амплитудно-модулированных (AM) сигналов в фазомодулированные (ФМ) сигналы и преобразователя ФМ-сигналов в ШИМ-сигналы, скважность которых эквивалентна углу поворота ИР относительно его статора.
Систематические погрешности преобразования угла поворота как в основной, так и в дополнительный электрические сигналы в известном способе представляют собой спектры пространственных гармоник, кратных числу зубцов ротора Р и числу зубцов статора М соответствующих ИР. Установив при реализации известного способа два ИР с некратными друг другу числами Р и М для формирования основного и дополнительного электрических сигналов, получают возможность выделить спектр погрешностей основного сигнала и затем его скомпенсировать. Дополнительный сигнал нужен только для определения погрешностей основного сигнала в режиме его калибровки во всем диапазоне измерения, т.е. полного оборота вала, и в дальнейших измерениях не используется. Но для формирования дополнительного сигнала требуются такие же преобразователи угла поворота в угловой эквивалент, как и для основного сигнала, что значительно усложняет устройство для реализации способа и не всегда приемлемо, особенно в ТГС. Кроме того, ряд ТГС имеют углы прокачки менее полного оборота, что не позволяет использовать данный способ измерения угла поворота.
Однако в ТГС установлены акселерометры, чувствительность которых в ограниченных диапазонах углов поворота относительно положения максимальной чувствительности достаточна для получения достоверной информации о величине углов поворота в этих диапазонах. Для минимизации ошибок при определении параметров спектра погрешностей основного сигнала каждый из угловых диапазонов должен быть кратным или близким к кратности целому числу периодов спектра погрешностей основного сигнала.
Разностный сигнал должен содержать взаимные отклонения между основным и дополнительным сигналами в выбранных в режиме калибровки угловых положениях вала. Поэтому основной и дополнительный сигналы должны быть представлены одинаковыми угловыми эквивалентами, например в виде скважности ШИМ-сигналов. Если дополнительный сигнал с выхода акселерометра представляет собой постоянное напряжение или ток, то на его выходе следует установить преобразователь напряжения в ШИМ-сигнал, например, на основе генератора пилообразного напряжения с периодом, равным периоду ШИМ основного сигнала.
Дополнительный сигнал акселерометра может содержать низкочастотную составляющую, вызванную погрешностью определения аддитивной составляющей или масштабного коэффициента и существенно влияющую на погрешность определения параметров спектра основного сигнала. Для повышения точности определения параметров спектра погрешностей основного сигнала эту составляющую следует удалить из разностного сигнала. Для этого разностный сигнал аппроксимируют полиномом второго … четвертого порядка и вычитают этот полином из разностного сигнала, а по полученной разности определяют спектр погрешностей основного сигнала в ограниченном диапазоне работы акселерометра, который затем экстраполируют на весь диапазон измерения угла.
Таким образом, в предложенном способе преобразуют угол поворота в основной и дополнительный электрические сигналы с одинаковыми угловыми эквивалентами, формируют из них разностный сигнал в равномерно расположенных угловых положениях вала в одном или нескольких ограниченных угловых диапазонах, выбирают каждый из угловых диапазонов кратным или близким к кратности целому числу периодов спектра погрешности основного сигнала, выделяют низкочастотную составляющую разностного сигнала путем его аппроксимации полиномом, вычитают низкочастотную составляющую из разностного сигнала, определяют параметры спектра погрешности основного сигнала по результату вычитания, запоминают их и экстраполируют на весь диапазон измерения, формируют для любого текущего значения основного сигнала поправку и корректируют угловой эквивалент основного сигнала.
Использование нескольких угловых диапазонов позволяет более точно определить параметры спектра основного сигнала за счет их усреднения.
Угловыми эквивалентами могут быть скважность ШИМ-сигналов, частота сигналов (импульсов), амплитуда напряжения, тока, фазовый сдвиг двух сигналов и т.д.
Один из вариантов устройства для реализации предложенного способа представлен на фиг.1. Устройство содержит преобразователь 1 угла поворота в ШИМ-сигнал, акселерометр 2, блок 3 функционального преобразования напряжения, преобразователь 4 напряжения в ШИМ-сигнал, вычитатель 5, аппроксиматор 6, вычитатель 7, вычислительный блок 8, блок 9 памяти, формирователь 10 поправки и вычитатель 11. Преобразователь 1 и акселерометр 2 связаны с входным валом 12. Преобразователь 1 может быть выполнен в виде последовательно соединенных индукционного редуктосина, блока преобразования АМ-сигналов в ФМ-сигналы и блока преобразования ФМ-сигналов в ШИМ-сигналы. Блок 3 предназначен для преобразования выходного напряжения U2 акселерометра 2, изменяющегося по синусоидальному закону от угла поворота вала 12, в напряжение U3, пропорциональное углу поворота вала 12. Помимо этого, в блоке 3 учитываются начальная аддитивная составляющая U0 погрешности блоков 2, 3, 4 и масштабные коэффициенты M1, М2 при повороте вала 12 с акселерометром 2 в обе стороны от исходного положения. Выходное напряжение U3 блока 3 функционального преобразования в зависимости от выходного напряжения U2 акселерометра 2 изменяется по закону:
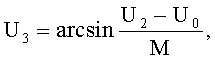
где М=M1 или М=M2 в зависимости от направления поворота (знака U2).
Значения U0 и M1 или М2 устанавливаются в блоке 3 при настройке акселерометра 2 вместе с блоками 3 и 4. Вычитатель 5 формирует разностный ШИМ-сигнал. Совокупность блоков 6…10 может быть реализована на одном микроконтроллере типа C8051F007 фирмы Cygnal с подключением входов и выходов, соответствующих его работе с ШИМ-сигналами.
Устройство работает в режиме калибровки и измерения. В режиме калибровки устанавливают вал 12 в угловое положение, соответствующее наибольшей чувствительности акселерометра 2 в направлении силы тяжести, измеряют аддитивную составляющую U0 и масштабные коэффициенты M1, M2 блоков 2…4. По результатам измерения проводят настройку блока 3 так, чтобы входные сигналы вычитателя 5 изменялись с одинаковым масштабом при повороте вала 12. Поворачивают вал 12 в равномерно расположенные угловые положения в обе стороны от исходного положения в выбранном угловом диапазоне, кратном или близком к кратности числу зубцов ротора и числу зубцов статора ИР, установленного в преобразователе 1. В вычитателе 5 формируется разностный сигнал между основным и дополнительным сигналами с выходов преобразователей 1 и 4. В блоке 6 аппроксимируют разностный сигнал полиномом второго … четвертого порядков для выделения низкочастотной составляющей погрешности блоков 2, 3, 4 в процессе калибровки и с помощью вычитателя 7 исключают влияние этой составляющей. В результате на выходе вычитателя 7 формируется сигнал, соответствующий спектру погрешностей преобразователя 1. В вычислительном блоке 8 определяют параметры спектра (амплитуду и фазу или амплитуду синусной и косинусной составляющей каждой из высокочастотных гармоник) погрешности, соответствующей преобразователю 1, путем разложения сигнала вычитателя 7 в ряд Фурье. Отсюда и вытекает требование кратности углового диапазона в режиме калибровки целому числу периодов спектра погрешности основного сигнала. Параметры спектра погрешности преобразователя 1 распространяют (экстраполируют) на весь диапазон работы (полный оборот вала 12) и запоминают в блоке 9. На этом режим калибровки заканчивается.
В режиме измерения угла поворота вала 12 (эксплуатации) для любого текущего значения угла по выходному сигналу преобразователя 1 в формирователе 10 определяется поправка в виде спектра погрешности по запомненным параметрам в блоке 9. В вычитателе 11 производится коррекция выходного ШИМ-сигнала преобразователя 1. Поскольку между углом поворота и спектром погрешностей имеется долговременная устойчивая связь, запомненные в блоке 9 при калибровке параметры спектра погрешностей преобразователя 1 используются в течение длительного периода времени между регламентными проверками (калибровками).
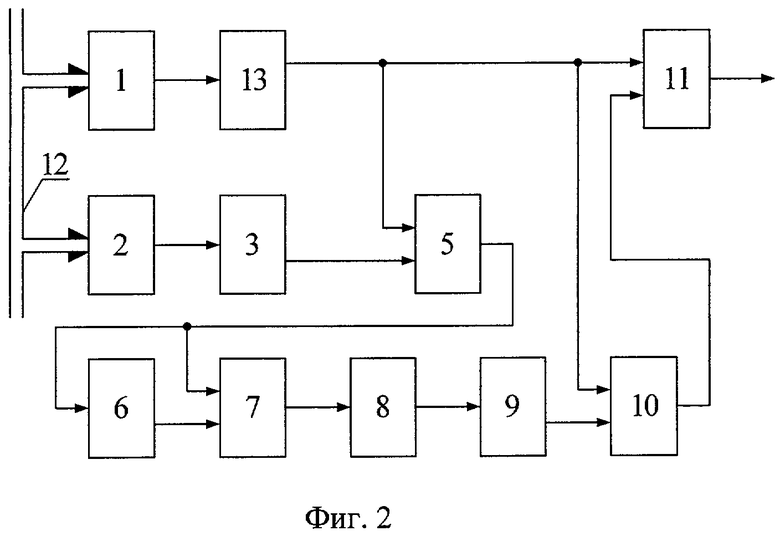
Второй вариант устройства (фиг.2) для реализации способа может быть выполнен с помощью преобразователя 13 ШИМ-сигналов в постоянное напряжение, вход которого соединен с выходом преобразователя 1, а выход подключен к одним входам вычитателей 5, 11 и формирователя 10. Наименование и функциональное назначение блоков на фиг.2 совпадает с одинаково обозначенными блоками на фиг.1. Выход блока 3 подключен непосредственно (минуя преобразователь 4) к другому входу вычитателя 5. Блок 13 вырабатывает постоянное напряжение, пропорциональное скважности входных ШИМ-сигналов. Вычитатель 5 формирует разностный сигнал в виде постоянного напряжения. Аналогично вычитателю 5 выполнен и вычитатель 11. Совокупность блоков 6…11 может быть реализована на микроконтроллере типа C8051F0XX фирмы Cygnal с подключением входов и выходов, соответствующих АЦП и ЦАП, входящих в состав микроконтроллера. В этом варианте угловыми эквивалентами являются значения постоянного напряжения на выходах блока 3 и преобразователя 13.
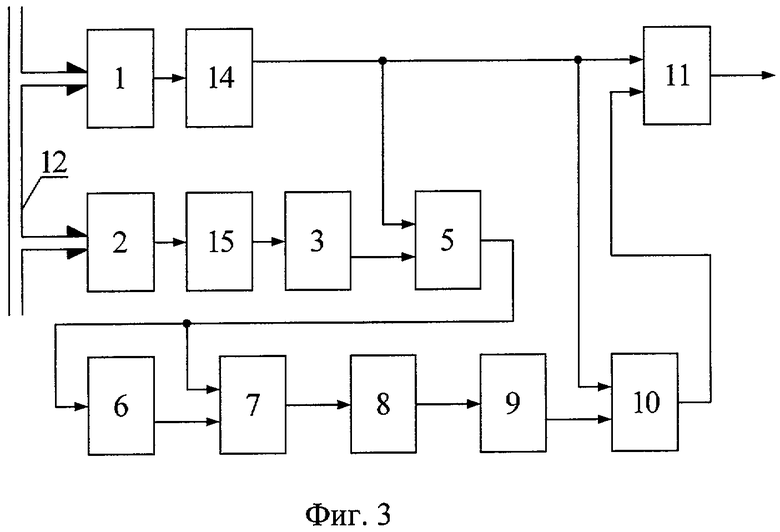
Третий вариант устройства (фиг.3) для реализации способа выполнен с помощью преобразователя 14 ШИМ-сигналов в код и преобразователя 15 напряжения в код. Совокупность блоков 3, 5…11 может быть реализована на любом микропроцессоре. Угловым эквивалентом в таком устройстве являются выходные коды преобразователей 14 и 15.
Технический эффект от использования предложенного способа измерения угла поворота вала состоит в упрощении его реализации путем исключения дополнительного редуктосина или другого датчика угла и блоков для преобразования его информации в угловой эквивалент, а также повышении точности угловой ориентации ТГС и других устройств с ограниченными углами прокачки.
Источники информации
1. Авторское свидетельство СССР №1159162, кл. H03M 1/46, 1983.
2. Авторское свидетельство СССР №1381711, кл. H03M 1/64, 1/50, 1986.
Дополнительные источники информации
1. Авторское свидетельство СССР №1786662, кл. H03M 1/46, 1993.
2. Патент РФ №2235422, кл. H03M 1/46, 2003.
3. Патент РФ №2108663, кл. H03M 1/64, 1998.
4. Патент РФ №2266614, кл. H03M 1/64, 2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
| Гибридный способ измерения углового положения | 2019 |
|
RU2714591C1 |
| Азимутальная ориентация платформы трехосного гиростабилизатора | 2016 |
|
RU2630526C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2017 |
|
RU2669263C1 |
| Низкочастотный стенд для калибровки и испытаний акселерометров и сейсмоприемников | 2019 |
|
RU2757971C2 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНОВ, КРИВИЗНЫ, НЕРОВНОСТИ И КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ ДОРОЖНОГО ПОКРЫТИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2162202C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ УХОДА ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2285902C1 |
| СПОСОБ КАЛИБРОВКИ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2004 |
|
RU2269813C2 |
| Способ калибровки систематической составляющей угловой скорости дрейфа поплавкового гироскопа | 2024 |
|
RU2829458C1 |
Изобретение относится к области автоматики и может быть использовано при определении угловой ориентации трехосного гиростабилизатора относительно базового корпуса. Сущность: преобразуют угол в основной и дополнительный электрические сигналы с одинаковыми угловыми эквивалентами. Формируют из них разностный сигнал в равномерно расположенных угловых положениях вала в одном или нескольких ограниченных угловых диапазонах. Выбирают каждый из угловых диапазонов кратным или близким к кратности целому числу периодов спектра погрешности основного сигнала. Выделяют низкочастотную составляющую разностного сигнала путем его аппроксимации полиномом. Вычитают низкочастотную составляющую из разностного сигнала. Определяют параметры спектра погрешности основного сигнала по результату вычитания, запоминают их и экстраполируют на весь диапазон измерения. Формируют для любого текущего значения выходного сигнала поправку и корректируют угловой эквивалент основного сигнала. Технический результат: повышение точности. 3 ил.
Способ измерения угла поворота вала, основанный на преобразовании угла в основной и дополнительный электрические сигналы с одинаковыми угловыми эквивалентами и формировании из них разностного сигнала в равномерно расположенных угловых положениях вала, определении параметров спектра погрешности основного сигнала и их запоминании, определении в произвольном угловом положении погрешности измерения и коррекции углового эквивалента основного сигнала, отличающийся тем, что выбирают равномерно расположенные угловые положения в одном или нескольких ограниченных угловых диапазонах, выбирают каждый из угловых диапазонов кратным или близким к кратности целому числу периодов спектра погрешности основного сигнала, выделяют низкочастотную составляющую разностного сигнала путем его аппроксимации полиномом, вычитают низкочастотную составляющую из разностного сигнала, определяют параметры спектра погрешности основного сигнала по полученной разности, экстраполируют полученный в ограниченном угловом диапазоне спектр погрешностей на весь диапазон измерения угла.
| Способ преобразования угла поворота вала в код | 1986 |
|
SU1381711A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА | 1995 |
|
RU2108664C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА | 1993 |
|
RU2107390C1 |
| Способ измерения угла поворота вала | 1990 |
|
SU1771069A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ УГЛА ПОВОРОТА ВАЛА В КОД | 2003 |
|
RU2235422C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ УГЛА ПОВОРОТА ВАЛА В КОД | 2004 |
|
RU2266614C1 |
| US 2009115408 A1, 07.05.2009. | |||

