Изобретение относится к инклинометрии скважин, в частности к решению задач по определению пространственного положения ствола скважины феррозондовым инклинометром, в том числе в процессе бурения наклонных и горизонтальных скважин.
При определении параметров пространственного положения ствола скважины для измерения магнитного азимута используются феррозонды, состоящие из триады датчиков напряженности магнитного поля (магнитометров), оси чувствительности которых ортогональны и жестко связаны с корпусом инклинометра. Показания каждого из магнитометров содержат информацию о проекциях напряженности магнитного поля Земли, величина которых зависит от ориентации осей чувствительности магнитометров относительно вектора напряженности магнитного поля Земли. На базе этой информации определяется азимут ствола скважины в месте нахождения инклинометра.
Известны феррозондовые скважинные инклинометры, которые содержат триаду из трех акселерометров с ортогональными осями чувствительности и триаду ортогональных феррозондов, оси чувствительности которых направлены параллельно осям корпуса инклинометра (Исаченко В.Х. Инклинометрия скважин. М.: Недра, 1987, стр. 46.) - в различных вариантах исполнения они представлены в изобретениях, например, патенты RU №2235200, 2004 г., №2018646, 1994 г., №2204712, 2003 г., патент GB №2370361 А1 (Великобритания, 2003 г.).
Недостатком этих инклинометров являются большие погрешности в измерении магнитного азимута в случае, когда в зоне расположения феррозондов присутствуют элементы конструкции бурильного комплекса, состоящие из ферромагнитных материалов. При наличии помех вследствие намагниченности ферромагнитных элементов бурильного оборудования (забойный агрегат, колонна труб) показания магнитометров искажаются на величину проекций магнитного поля от источников помехи на оси чувствительности магнитометров.
В технике приборостроения широко используются методы разделения полезного сигнала и постоянной помехи путем модуляции показаний источников информации, как, например, в устройстве для контроля комплекса параметров искривления скважин (а.с. СССР №1208208, 1986 г.), содержащем триаду феррозондовых датчиков. В этом устройстве один из феррозондов триады ориентирован по продольной оси корпуса инклинометра, а два других установлены под углом к продольной оси корпуса. Однако для повышения качества определения параметров гармонической и постоянной составляющих суммарного сигнала необходимо, чтобы глубина модуляции измеренного сигнала была максимальной. Это связано с тем, что погрешности при определении параметров вектора напряженности магнитного поля Земли и помех от ферромагнитных элементов бурильной системы, которые вычисляются по показаниям магнитометров, зависят от амплитуды модулированных сигналов и, следовательно, от глубины их модуляции. Но в случае совпадения или параллельности оси чувствительности прибора и оси его поворота амплитуда модулированного сигнала равна нулю. Поэтому модуляция сигналов техферрозондов, которые установлены под углом к продольной оси корпуса инклинометра, позволяет решить эту задачу. Однако модуляция сигналов феррозонда, ориентированного в устройстве по оси корпуса, практически бесполезна.
Кроме того, достоверность получаемых данных непосредственно зависит от надежности и точности работы самих применяемых датчиков и электронных блоков, которые могут выходить из строя в процессе работ на скважине.
Задачей предлагаемого изобретения является повышение аппаратной и информационной надежности скважинной системы и повышение точности измерений пространственного положения ствола скважины.
Поставленная задача решается следующим образом.
В соответствии со способом скважинной инклинометрии, включающем операцию предкаротажного наземного контроля работоспособности датчиков скважинного прибора, содержащего две триады акселерометрических и феррозондовых датчиков, и последующий каротаж в процессе спуско-подъемных операций с привязкой получаемых данных по глубине скважины, согласно изобретению
- предкаротажный наземный контроль осуществляют с применением двух идентичных последовательно состыкованных друг с другом скважинных приборов, каждый из которых содержит триады акселерометрических и феррозондовых датчиков, оси чувствительности которых совпадают с осями базисов первого и второго корпусов Rk1(x1,y1,z1) и Rk2(x2,y2,z2) соответственно,
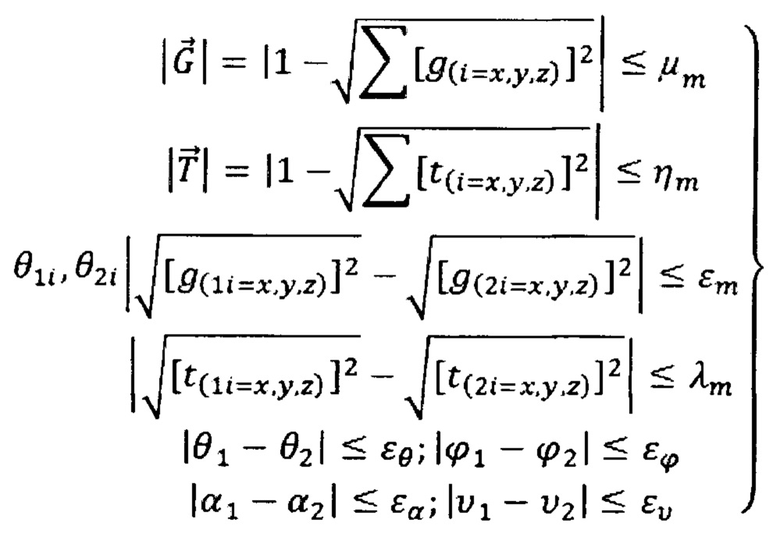
- в процессе предкаротажного наземного контроля при произвольно задаваемых значениях визирных углов ϕ1i, ϕ2i определяют значения зенитных углов θ1i, θ2i, углов азимута α1i, α2i и углов магнитного наклонения υ1i, υ2i датчиков обоих скважинных приборов и по полученным сравнительным значениям составляют таблицу системы неравенств:
где:
μm, ηm, λm, εk(m, θ, ϕ, α, υ) - априори задаваемые величины, определяемые предельными значениями погрешностей, которые нормированы метрологическими характеристиками первого и второго скважинного прибора;  - вектор ускорения свободного падения;
- вектор ускорения свободного падения;  - вектор индукции геомагнитного поля; gij - сигнал акселерометрических датчиков;
- вектор индукции геомагнитного поля; gij - сигнал акселерометрических датчиков;  - сигналы феррозондовых датчиков,
- сигналы феррозондовых датчиков,
далее, в процессе спускоподъемных операций скважинного прибора, регистрируют значения информационных сигналов всех акселерометрических и феррозондовых датчиков обоих скважинных приборов, производят их сопоставительный анализ с таблицей системы неравенств и производят диагностику работоспособности датчиков скважинной системы и коррекцию получаемой информации.
Для реализации предложенного способа применяют скважинную систему, содержащую корпус, внутри которого размещены две триады акселерометрических и феррозондовых датчиков, электронный блок преобразования информационных сигналов и устройство передачи данных к наземной аппаратуре, которая дополнительно оснащена вторым корпусом с размещенными внутри двумя триадами акселерометрических и феррозондовых датчиков, электронным блоком преобразования информационных сигналов и устройством передачи данных к наземной аппаратуре, идентичным первому. Оба корпуса последовательно состыкованы друг с другом по продольной оси таким образом, что оси чувствительности всех датчиков совпадают с осями базисов первого и второго корпусов Rk1(x1,y1,z1) и Rk2(x2,y2,z2) соответственно.
Предложенный способ скважинной инклинометрии позволяет по результатам предкаротажной проверки скважинной системы в процессе каротажных работ на скважине в реальном режиме времени сопоставлять получаемую информацию с таблицей системы неравенств, оперативно выявлять нерабочие датчики и в случае отказа какого либо из акселерометрических или феррозондовых датчиков одного скважинного прибора определять искомые зенитный и визирный углы по измеренным значениям второго скважинного прибора и тем самым оперативно корректировать получаемую информацию, повышая точность измерений.
Наряду с этим, при возникновении неявных отказов какого либо из датчиков (уход параметров, изменение линейности статических характеристик и др.) сопоставительный анализ всех условий системы неравенств с получаемой информацией обеспечивает возможность выявления конкретного неработоспособного датчика непосредственно в процессе эксплуатации аппаратуры в скважинных условиях без применения технологических операций с дополнительными временными затратами, повышая тем самым технологичность и экономичность эксплуатации предложенной скважинной системы для реализации настоящего способа скважинной инклинометрии.
Предложенные способ скважинной инклинометрии и скважинная система для его реализации экономичны, не требуют для практической реализации специального оборудования и материалов, что соответствует критерию изобретения «промышленная применимость».
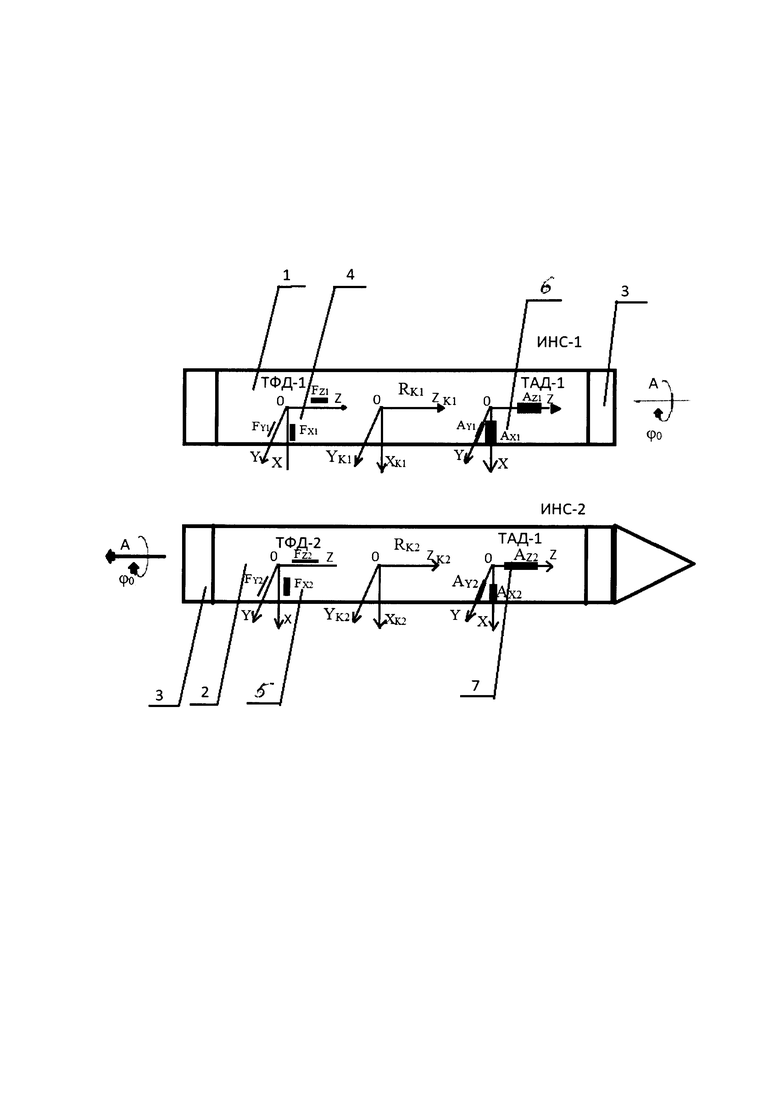
На фигуре приведена схема варианта скважинной системы для реализации способа скважинной инклинометрии.
Скважинная система содержит скважинный прибор 1 и скважинный прибор 2, состыкованные друг с другом посредством резьбового соединения 3. Каждый из скважинных приборов 1 и 2 содержит триаду феррозондовых датчиков 4 и 5 - (ТФД-1 и ТФД-2) соответственно и триады акселерометрических датчиков 6 и 7 - (ТАД-1, ТАД-2) соответственно.
На практике предварительно производят предкаротажный контроль работоспособности предложенной скважинной системы. Для этого располагают «связку» скважинных приборов 1 и 2 таким образом, чтобы ее пространственная ориентация не менялась (например, в положении близком к горизонтальному), и была возможность свободных поворотов вокруг собственной продольной оси. Поскольку скважинные приборы 1 и 2 жестко состыкованы между собой посредством резьбового соединения 3, базис Rk2(x2,y2,z2) и корпуса скважинного прибора 2 в апсидальной плоскости по отношению к базису Rk1(x1,y1,z1) корпуса скважинного прибора 1 занимает положение, смещенное на визирный угол  , числовое значение которого выражается постоянной величиной, то есть ϕ0=const. то есть обеспечиваются условия α=const; θ=const, а ϕ=var. Затем для различных произвольных значений визирного угла
, числовое значение которого выражается постоянной величиной, то есть ϕ0=const. то есть обеспечиваются условия α=const; θ=const, а ϕ=var. Затем для различных произвольных значений визирного угла  определяют значения зенитных углов θ1i, θ2i, визирных углов, азимутов, а также и углов магнитного наклонения
определяют значения зенитных углов θ1i, θ2i, визирных углов, азимутов, а также и углов магнитного наклонения  . По измеряемым информационным сигналам с датчиков для каждого из скважинных приборов 1 и 2 выполняют сравнение полученных результатов и составляют таблицу системы неравенств
. По измеряемым информационным сигналам с датчиков для каждого из скважинных приборов 1 и 2 выполняют сравнение полученных результатов и составляют таблицу системы неравенств
где μm, ηm, λm, εk(m, θ, ϕ, α, υ) - априори задаваемые величины, определяемые предельными значениями погрешностей, которые нормированы метрологическими характеристиками скважинных приборов 1 и 2.
Если выполняются все условия соответствия системы неравенств (1), скважинная система пригодна к эксплуатации.
Далее при проведении каротажных работ скважинную систему спускают на кабеле по стволу скважины до забоя и затем в процессе подъема производят измерения в соответствии с традиционной методикой инклинометрического каротажа с привязкой по глубине. При этом регистрируют получаемые значения всех двенадцати информационных сигналов, получаемых от датчиков 4-7 обоих скважинных приборов и поэтапно осуществляют анализ измеренных значений.
На начальном этапе выполняют оценку модулей сигналов по измеряемым проекциям со всех трехкомпонентных датчиков скважинной системы. Если соблюдаются первые два условия системы неравенств (1), то выполняют следующий этап анализа.
Если же первые два условия системы неравенств (1) не соблюдаются, то выполняют анализ уже непосредственно измеряемых сигналов с акселерометрических датчиков gij и феррозондовых датчиков tij.
При анализе значений измеряемых сигналов с акселерометрических и феррозондовых датчиков применяют классификатор отказов, суть которого заключается в следующем. Поскольку информационные электрические сигналы с датчиков 4-7 в дальнейшем преобразуются в форму, удобную для передачи по каротажному кабелю в наземную аппаратуру, то при явных отказах какого-либо из датчиков, либо электронных блоков вторичного преобразования сигналов, могут возникнуть ситуации, когда цифровые коды, соответствующие каждому из значений gij и tij, будут идентифицированы как нулевые значения U0, или значения, равные величинам разнополярных напряжений питания скважинных приборов Um и Un, которые, как правило, превышают предельные значения динамических диапазонов изменений аналоговых сигналов с датчиков:

Тогда, в случае отказа, например, одного из датчиков 6 (например, акселерометра Ax1 в ТАД-1), определяют искомые зенитный и визирный углы по измеренным значениям gi2(x,y,z) датчиков 7 в ТАД-2. Аналогичным образом поступают и в случаях отказов какого-либо из феррозондовых датчиков 4 или 5 в ТФД-1 или в ТФД-2 соответственно.
Кроме того, в процессе эксплуатации возможно возникновение также скрытых (неявных) отказов датчиков (уход параметров, изменение линейности статических характеристик и др.). Анализ всех условий системы неравенств (1), , опираясь на регистрацию недостоверных информационных сигналов с акселерометрических и феррозондовых датчиков 4-7, позволяет выявить конкретный датчик, обладающий скрытым дефектом и осуществлять в дальнейшем ремонт и восстановление отказавшего скважинного прибора уже предметно ориентировано.
Таким образом, предложенные способ скважинной инклинометрии и скважинная система для его реализации позволяют повысить точность измерений феррозондовым скважинным инклинометром путем определения и компенсации помех, возникающих в магнитометрах вследствие влияния намагниченных элементов конструкции бурильной компоновки при использовании методов модуляции показаний магнитометров.
Наряду с этим, в процессе работы, опираясь на регистрацию недостоверных информационных сигналов с акселерометрических или феррозондовых датчиков, обеспечивается возможность адресно выявить датчики, обладающие скрытыми дефектами, обеспечивая тем самым возможность ремонта и восстановления отказавших приборов уже предметно ориентировано, без технологических операций с дополнительными временными затратами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА УГЛОВЫХ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ БУРОВОГО ИНСТРУМЕНТА | 2015 |
|
RU2610957C1 |
| СПОСОБ КАЛИБРОВКИ ИНКЛИНОМЕТРИЧЕСКИХ СИСТЕМ | 2015 |
|
RU2611567C1 |
| ИНКЛИНОМЕТР | 1998 |
|
RU2172828C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2004 |
|
RU2257546C1 |
| ФЕРРОЗОНДОВЫЙ СКВАЖИННЫЙ ИНКЛИНОМЕТР | 2005 |
|
RU2291294C1 |
| СПОСОБ ПОВЫШЕНИЯ ВИБРОУСТОЙЧИВОСТИ ИНКЛИНОМЕТРА | 2013 |
|
RU2534866C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2012 |
|
RU2503810C1 |
| Автономный инклинометр | 1988 |
|
SU1615348A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА, ЗЕНИТНОГО УГЛА И УГЛА МАГНИТНОГО НАКЛОНЕНИЯ | 1997 |
|
RU2131029C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СКВАЖИННОГО ПРИБОРА В БУРОВОЙ СКВАЖИНЕ | 2011 |
|
RU2482270C1 |
Изобретение относится к инклинометрии скважин, в частности к способу и системе скважинной инклинометрии для определения пространственного положения ствола скважины феррозондовым инклинометром, в том числе в процессе бурения наклонных и горизонтальных скважин. Технический результат заключается в повышении аппаратной и информационной надежности скважинной системы и повышении точности измерений пространственного положения ствола скважины. Способ включает предкаротажный наземный контроль, который осуществляют с применением двух идентичных последовательно состыкованных друг с другом скважинных приборов, каждый из которых содержит триады акселерометрических и феррозондовых датчиков, оси чувствительности которых совпадают с осями базисов первого и второго корпусов скважинных приборов Rk1(x1,y1,z1) и Rk2(x2,y2,z2) соответственно. По результатам предкаротажного контроля составляют таблицу систем неравенств, характеризующих совокупности условий работоспособности датчиков. Далее в процессе спускоподъемных операций регистрируют значения информационных сигналов всех акселерометрических и феррозондовых датчиков обоих скважинных приборов, производят сопоставительный анализ регистрируемых значений с таблицей систем неравенств, характеризующих совокупности условий работоспособности датчиков, который позволяет выявить нерабочие датчики, при этом в случае отказа какого-либо из акселерометрических или феррозондовых датчиков одного скважинного прибора определяют искомые зенитный и визирный углы по значениям второго скважинного прибора. 2 н.п. ф-лы, 1 ил.
1. Способ скважинной инклинометрии, включающий операции предкаротажного наземного контроля работоспособности датчиков скважинного прибора, содержащего две триады акселерометрических и феррозондовых датчиков, и последущий каротаж в процессе спускоподъемных операций скважинного прибора с привязкой получаемых данных по глубине скважины, отличающийся тем, что предкаротажный наземный контроль осуществляют с применением двух идентичных последовательно состыкованных друг с другом скважинных приборов, каждый из которых содержит триады акселерометрических и феррозондовых датчиков, оси чувствительности которых совпадают с осями базисов первого и второго корпусов скважинных приборов Rk1(x1,y1,z1) и Rk2(x2,y2,z2) соответственно; при произвольно задаваемых значениях визирных углов ϕ1i, ϕ2i определяют значения зенитных углов θ1i, θ2i, углов азимута α1i, α2i, углов магнитного наклонения υ1i, υ2i датчиков обоих скважинных приборов и по полученным сравнительным значениям составляют таблицу систем неравенств, характеризующих совокупности условий работоспособности датчиков:
где μm, ηm, λm, εk(m,θ,ϕ,α,υ) априори задаваемые величины, определяемые предельными значениями погрешностей, которые нормированы метрологическими характеристиками первого и второго скважинного прибора;
 - вектор ускорения свободного падения;
- вектор ускорения свободного падения;
 - вектор индукции геомагнитного поля;
- вектор индукции геомагнитного поля;
gij - сигнал акселерометрических датчиков;
tij - сигналы феррозондовых датчиков;
далее в процессе спускоподъемных операций регистрируют значения информационных сигналов всех акселерометрических и феррозондовых датчиков обоих скважинных приборов, производят сопоставительный анализ регистрируемых значений с таблицей систем неравенств, характеризующих совокупности условий работоспособности датчиков, который позволяет выявить нерабочие датчики, при этом в случае отказа какого-либо из акселерометрических или феррозондовых датчиков одного скважинного прибора определяют искомые зенитный и визирный углы по значениям второго скважинного прибора.
2. Скважинная система для реализации способа скважинной инклинометрии по п. 1, содержащая корпус, внутри которого размещены две триады акселерометрических и феррозондовых датчиков, электронный блок преобразования информационных сигналов и устройство передачи данных к наземной аппаратуре, отличающаяся тем, что она дополнительно оснащена вторым корпусом с размещенными внутри двумя триадами акселерометрических и феррозондовых датчиков, электронным блоком преобразования информационных сигналов и устройством передачи данных к наземной аппаратуре, идентичным первому и последовательно состыкованным с ним по продольной оси таким образом, что оси чувствительности всех датчиков совпадают с осями базисов первого и второго корпусов скважинных приборов Rk1(x1,y1,z1) и Rk2(x2,y2,z2) соответственно.
| Способ приготовления теплоносителя на основе глин и окиси алюминия для получения углеводородов | 1957 |
|
SU111890A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЗЕНИТНЫХ И АЗИМУТАЛЬНЫХ УГЛОВ | 2002 |
|
RU2231638C1 |
| Способ очистки никелевого электролита | 1939 |
|
SU57817A1 |
| Способ устранения потери в вакуумных приборах | 1941 |
|
SU61789A1 |
| СПОСОБ ПОВЫШЕНИЯ ВИБРОУСТОЙЧИВОСТИ СКВАЖИННОГО ИНКЛИНОМЕТРА И ИНКЛИНОМЕТР, В КОТОРОМ РЕАЛИЗОВАН ДАННЫЙ СПОСОБ | 2008 |
|
RU2368775C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИНЫ | 2014 |
|
RU2567064C1 |
| СПОСОБЫ И СИСТЕМЫ МОДЕЛИРОВАНИЯ УСОВЕРШЕНСТВОВАННОЙ ТРЕХМЕРНОЙ КОМПОНОВКИ НИЗА БУРИЛЬНОЙ КОЛОННЫ | 2014 |
|
RU2679151C1 |
| US 6453239 B1, 17.09.2002. | |||

