Изобретение относится к способу эксплуатации транспортного средства с тяговой аккумуляторной батареей для приведения транспортного средства в действие и с рекуперирующим устройством для зарядки тяговой аккумуляторной батареи путем рекуперации энергии.
Для увеличения запаса хода электрического транспортного средства в процессе эксплуатации транспортного средства энергия может быть восстановлена за счет рекуперации. Для этого генератор / рекуперирующее устройство транспортного средства может преобразовывать кинетическую энергию в электрическую энергию при замедлении транспортного средства и накапливать ее в тяговой аккумуляторной батарее транспортного средства.
В DE 10 2012 224 170 A1 раскрывается устройство и способ для управления режимом движения транспортного средства в условиях свободного хода. Устройство может включать детектор скорости транспортного средства, оператора свободного хода и запаса хода и систему управления. Детектор скорости транспортного средства регистрирует текущую скорость транспортного средства, если от датчика положения педали акселератора и от датчика положения педали тормоза поступают нулевые сигналы. Оператор свободного хода и запаса хода определяет, возможен ли режим свободного хода, регистрируя текущее местоположение транспортного средства, дорожные условия и информацию о местонахождении, а также информацию о расстоянии между транспортными средствами, если текущая скорость транспортного средства равна определенной скорости или превышает ее. Система управления отключает электродвигатель в рамках реакции на определение, что режим свободного хода возможен, если расстояние между транспортным средством и движущимся перед ним транспортным средством равно заданному расстоянию или превышает его.
В DE 11 2013 004 514 T5 раскрываются способ и система распознавания бесплатной энергии и использование бесплатной энергии в по меньшей мере одной системе транспортного средства. Способ включает моделирование по меньшей мере одного будущего профиля скорости на находящемся перед транспортным средством участке дороги на основе информации об этом участке дороги. Способ включает распознавание на основе по меньшей мере одного будущего профиля скорости доступности для транспортного средства бесплатной энергии на участке дороги. Доступная бесплатная энергия определяется как излишек энергии, которым транспортное средство располагает в моделируемом промежутке времени движения накатом и при моделируемом активном торможении, если за моделируемым промежутком времени движения накатом следует моделируемое активное торможение. Способ также включает использование доступной бесплатной энергии для пополнения заряда по меньшей мере одного накопителя энергии в по меньшей мере одной системе транспортного средства, получающей энергию от трансмиссии транспортного средства.
Из US 2016/0052519 A1 известно описание оснащения электрического транспортного средства ручным переключателем свободного хода.
В основе данного изобретения лежит задача создания улучшенного или альтернативного способа эксплуатации транспортного средства с тяговой аккумуляторной батареей и рекуперирующим устройством. В частности, должны быть увеличены запас хода и/или общая эффективность транспортного средства и/или учтены аспекты безопасности движения.
Поставленная задача решается за счет способа по независимому пункту формулы изобретения. Предпочтительные дополнительные варианты осуществления изобретения перечислены в зависимых пунктах формулы изобретения и в описании.
Способ предполагает эксплуатацию транспортного средства с тяговой аккумуляторной батареей для приведения транспортного средства в действие и с рекуперирующим устройством для зарядки тяговой аккумуляторной батареи путем рекуперации энергии. Способ предполагает организацию режима рекуперации рекуперирующего устройства для зарядки тяговой аккумуляторной батареи. Способ предполагает организацию режима свободного хода транспортного средства без рекуперации рекуперирующим устройством. Способ предполагает выбор режима работы транспортного средства между режимами свободного хода и рекуперации в зависимости от (общего) баланса энергии и/или эксергии транспортного средства. Способ предполагает эксплуатацию транспортного средства в выбранном режиме работы.
Эксергия обозначает часть общей энергии системы, которая может быть потрачена на выполнение работы при переходе этой системы в состояние термодинамического (термического, механического и химического) равновесия с окружающей средой.
Способ обладает тем преимуществом, что из нескольких доступных режимов работы может быть выбран такой режим, который оценивается как энергетически наиболее целесообразный или как наиболее безопасный. Это позволяет выбирать, к примеру, режим рекуперации с большой степенью рекуперации, если требуется, предстоит или прогнозируется сильное замедление транспортного средства (например, дорожный затор впереди). Также возможен выбор, например, режима свободного хода, если на ровной дороге без подъема и спуска требуется минимальное замедление транспортного средства по причине отсутствия необходимости ненужного торможения транспортного средства, к примеру, на автомагистрали. Формирование баланса энергии и/или эксергии транспортного средства делает возможным выбор энергетически наиболее целесообразного режима работы. На основании баланса энергии и/или эксергии могут быть предсказаны значения энергии и/или эксергии для режима свободного хода и режима рекуперации. После этого может быть выбран, например, лучший с точки зрения энергии режим работы.
В частности, способ может быть предназначен для эксплуатации транспортного средства в условиях свободного хода без приведения в действие акселератора транспортного средства и тормоза транспортного средства.
Предпочтительно, чтобы в режиме свободного хода можно было отключить рекуперирующее устройство и/или сцепление в трансмиссии для уменьшения сопротивления. Сцепление может быть, например, расположено между электроприводом (например, электродвигателем) транспортного средства и колесом транспортного средства с использованием приводного соединения.
Например, рекуперирующее устройство может быть частью электропривода транспортного средства, включающего по меньшей мере один электрический мотор-генератор.
В дополнительном варианте осуществления изобретения баланс энергии и/или эксергии транспортного средства включает данные транспортного средства и данные о климатических условиях окружающей среды. Данные транспортного средства могут включать значение скорости транспортного средства, ускорения транспортного средства и массы транспортного средства в конкретный момент времени. Данные о климатических условиях окружающей среды могут включать значения температуры окружающей среды, инсоляции, направление и силу ветра.
В одном из примеров осуществления изобретения выбор режима работы зависит от полученных данных об энергии свободного хода и/или эксергии свободного хода, а также от полученных данных об энергии рекуперации и/или об эксергии рекуперации.
В частности, выбор режима работы в зависимости от баланса энергии и/или эксергии может включать сравнение расчетной энергии и/или эксергии свободного хода с расчетной энергией и/или эксергией рекуперации.
В наиболее предпочтительном варианте осуществления изобретения выбор режима работы зависит от текущей дорожной ситуации, в которой транспортное средство находится в конкретный момент времени, и/или от прогнозируемой дорожной ситуации, в которой будет находиться транспортное средство. Тем самым, например, в зависимости от баланса энергии и/или эксергии транспортного средства, текущей и прогнозируемой дорожной ситуации транспортного средства может быть выбран, в частности, с учетом энергетических аспектов, наиболее подходящий режим работы. При этом учитываются, в частности, условия замедления (например, дорожный затор, подъемы и т. д.) и условия ускорения (например, снижение плотности затора, спуск и т. д.). В результате при прогнозируемом замедлении может быть выбран, скорее, режим рекуперации, в то время как при прогнозируемом ускорении — скорее, режим свободного хода, чтобы избежать ненужного торможения транспортного средства.
В одном из вариантов осуществления изобретения текущая дорожная ситуация определяется в зависимости от текущего состояния дорожного движения и/или прогнозируемая дорожная ситуация определяется в зависимости от прогнозируемого состояния дорожного движения. Состояние дорожного движения может соотноситься с информацией о транспортном потоке, дорожном заторе, значениями расстояния между транспортными средствами, значениями скорости движущихся впереди транспортных средств и т. д. Эта информация может быть получена, например, через интерфейс связи транспортного средства. Также возможно, чтобы транспортное средство включало собственные системы и устройства регистрации по меньшей мере некоторых типов информации из перечисленных.
В дополнительном варианте осуществления изобретения текущая дорожная ситуация определяется в зависимости от текущей топологии дороги и/или прогнозируемая дорожная ситуация определяется в зависимости от прогнозируемой топологии дороги. Топология дороги может соотноситься с информацией о спуске, подъеме, прохождении, радиусе поворота, перекрестке и т. д.
В одном из вариантов осуществления изобретения текущая дорожная ситуация определяется в зависимости от текущего расстояния между транспортным средством и следующим за ним транспортным средством в конкретный момент времени и/или прогнозируемая дорожная ситуация определяется в зависимости от прогнозируемого расстояния между транспортным средством и следующим за ним транспортным средством. Тем самым, при выборе подходящего режима работы могут учитываться соображения безопасности. Например, выбор энергетически предпочтительного в конкретной дорожной ситуации режима рекуперации транспортного средства может не происходить, если расстояние до следующего за ним транспортного средства слишком малое и, тем самым, существует опасность столкновения.
В дополнительном варианте осуществления изобретения текущая дорожная ситуация определяется в зависимости от текущего расстояния между транспортным средством и движущимся перед ним транспортным средством в конкретный момент времени и/или прогнозируемая дорожная ситуация определяется в зависимости от прогнозируемого расстояния между транспортным средством и движущимся перед ним транспортным средством. Например, выбор энергетически предпочтительного в конкретной дорожной ситуации режима свободного хода транспортного средства может не происходить, если расстояние до движущегося перед ним транспортного средства слишком малое и, тем самым, существует опасность столкновения.
В одном из примеров осуществления изобретения текущая дорожная ситуация определяется в зависимости от по меньшей мере одного действующего в конкретный момент времени правила дорожного движения и/или прогнозируемая дорожная ситуация определяется в зависимости от по меньшей мере одного прогнозируемого правила дорожного движения. По меньшей мере одно из правил дорожного движения может включать, например, ограничение максимальной скорости и право преимущественного проезда.
В наиболее предпочтительном примере осуществления изобретения режим рекуперации выполнен с возможностью рекуперации разной величины, в частности, степени рекуперации, для зарядки тяговой аккумуляторной батареи. Предпочтительно, чтобы в этом случае рекуперация в режиме рекуперации (при выборе режима рекуперации в качестве режима работы) могла осуществляться в зависимости от баланса энергии транспортного средства, баланса эксергии транспортного средства, энергии свободного хода транспортного средства, эксергии свободного хода транспортного средства, энергии рекуперации транспортного средства, эксергии рекуперации транспортного средства, текущей и/или прогнозируемой дорожной ситуации, в которой находится транспортное средство, текущего и/или прогнозируемого состояния дорожного движения, текущего и/или прогнозируемого расстояния между транспортным средством и следующим за ним транспортным средством и/или текущего и/или прогнозируемого расстояния между транспортным средством движущимся перед ним транспортным средством. Целью может быть, например, получение максимальной кинетической энергии в прогнозируемом режиме торможения транспортного средства.
В дополнительном примере осуществления изобретения текущая топология дороги, в частности, наличие в конкретный момент времени спуска или подъема, регистрируется датчиком наклона транспортного средства.
Также возможно, чтобы текущее состояние дорожного движения, текущая топология дороги, текущее расстояние до следующего за транспортным средством транспортного средства и/или текущего расстояния до движущегося перед транспортным средством транспортного средства регистрировались системой камер транспортного средства. Система распознавания образов, связанная с системой камер, позволяет получать необходимую информацию по записям системы камер, например, с помощью предварительно заданных алгоритмов распознавания образов.
В предпочтительном варианте осуществления изобретения выбор режима работы осуществляется предиктивной системой, в частности, предназначенной для прогнозирования будущего состояния дорожного движения, будущей топологии дороги и/или по меньшей мере одного из правил дорожного движения, которое будет действовать.
В дополнительном варианте осуществления изобретения предиктивная система является самообучающейся или несамообучающейся.
В дополнительном варианте осуществления изобретения предиктивная система включает искусственную нейронную сеть.
Например, также возможно, чтобы выбор режима работы зависел от степени износа транспортного средства. К примеру, тяговая аккумуляторная батарея транспортного средства уже может иметь такое количество циклов зарядки, которое превышает предварительно заданное предельное значение. В этом случае для сбережения тяговой аккумуляторной батареи можно, например, отказаться от короткой рекуперации и вместо нее выбрать режим свободного хода.
В дополнительном примере осуществления изобретения выбор режима работы предполагает прогнозирование предстоящего маршрута следования транспортного средства с предстоящими условиями ускорения и/или замедления на предстоящем маршруте следования. Дополнительно производится определение (прогнозируемой) энергии свободного хода и/или эксергии свободного хода для прохождения прогнозируемого предстоящего маршрута следования и (прогнозируемой) энергии рекуперации и/или эксергии рекуперации для прохождения прогнозируемого предстоящего маршрута следования. Режим работы транспортного средства осуществляется в зависимости от полученных данных об энергии свободного хода и/или эксергии свободного хода, а также от полученных данных об энергии рекуперации и/или об эксергии рекуперации.
В частности, прогнозирование предстоящих условий ускорения и/или замедления на предстоящем маршруте следования может выполняться в зависимости от состояния дорожного движения, топологии дороги, по меньшей мере одного правила дорожного движения, расстояния до движущегося впереди транспортного средства и/или расстояния до движущегося позади транспортного средства.
Предпочтительно, чтобы энергия свободного хода и энергия рекуперации могли быть определены на основе баланса энергии транспортного средства.
В частности, эксергия свободного хода и эксергия рекуперации могут быть определены на основе баланса эксергии транспортного средства.
Предпочтительно, чтобы длина прогнозируемого предстоящего маршрута следования могла быть регулируемой и/или могла зависеть от текущей скорости транспортного средства.
Изобретение также относится к транспортному средству, в частности, к транспортному средству хозяйственного назначения (например, автобусу или грузовому автомобилю) с блоком управления, выполненным для реализации способа в соответствии с приведенным здесь описанием.
Транспортное средство может быть выполнено, в частности, в виде гибридного электрического транспортного средства, электрического транспортного средства или транспортного средства с топливными элементами.
Употребляемый в данном описании термин «блок управления» относится к электронному устройству, которое в зависимости от конструкции может выполнять функции управления и/или регулирования.
Описанные выше предпочтительные варианты осуществления и признаки изобретения можно комбинировать друг с другом в любом сочетании. Другие детали и преимущества данного изобретения описываются ниже со ссылкой на прилагаемый чертеж. На нем показано
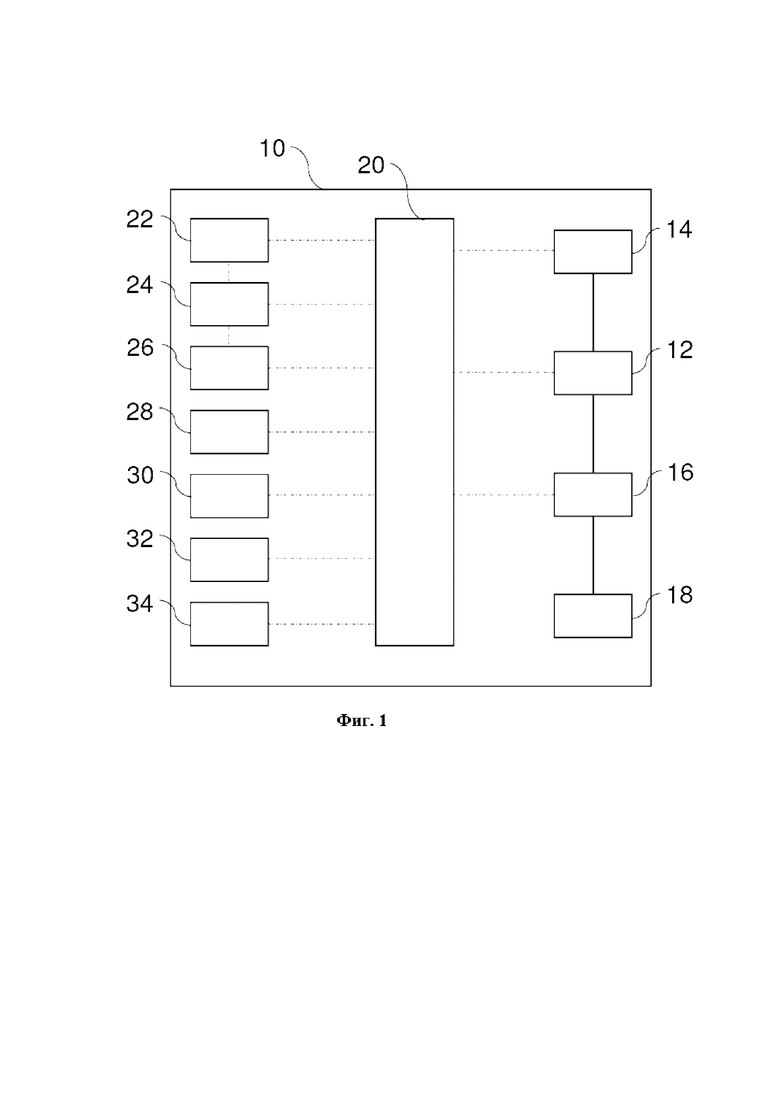
Фиг. 1. Схематическое изображение транспортного средства согласно данному раскрытию.
На фиг. 1 транспортное средство 10 для исполнения раскрытого здесь способа схематически показано в виде прямоугольника. Транспортным средством 10 может быть, например, легковой автомобиль или транспортное средство хозяйственного назначения, к примеру, автобус или грузовой автомобиль.
Транспортное средство 10 включает электропривод 12, тяговую аккумуляторную батарею 14, сцепление 16, приводные колеса 18 и блок 20 управления.
Электропривод 12 может быть единственным приводом транспортного средства 10. Иными словами, это транспортное средство 10 может быть чисто электрическим транспортным средством (англ. BEV – battery electric vehicle – электрическое транспортное средство с аккумуляторным источником питания). Тем не менее, также возможно, чтобы электропривод 12 был лишь одним из нескольких приводов транспортного средства 10. Например, это транспортное средство 10 может быть гибридным электрическим транспортным средством (англ. HEV – hybrid electric vehicle – гибридное электрическое транспортное средство), дополнительно включающим двигатель внутреннего сгорания (не изображен) для приведения в движение колес 18.
Электропривод 12 электрически соединен с тяговой аккумуляторной батареей 14. Тяговая аккумуляторная батарея 14 предоставляет электрическую энергию, необходимую для приведения в действие электропривода 12. Электропривод 12 также может использоваться в качестве генератора для зарядки тяговой аккумуляторной батареи 14. В некоторых примерах осуществления изобретения, например, у чисто электрических транспортных средств или у так называемого подзаряжаемого гибридного электротранспорта (англ. PHEV – plug-in hybrid electric vehicle – ПГЭТ) тяговая аккумуляторная батарея 14 может иметь возможность дополнительной зарядки от внешнего источника посредством электрического подключения на транспортном средстве 10.
Электропривод 12 может включать один или несколько электродвигателей. Электродвигатель или электродвигатели, к примеру, могут быть установлены внутри транспортного средства 10 или могут быть выполнены в виде мотор-колес в колесах 18. Колеса 18 могут представлять собой приводные колеса переднего моста и/или приводные колеса заднего моста транспортного средства 10.
Для приведения транспортного средства 10 в движение тяговая аккумуляторная батарея 14 снабжает электропривод 12 электрической энергией. Электропривод 12 преобразует электрическую энергию в кинетическую энергию и, тем самым, приводит в движение колеса 18 через включенное сцепление 16.
Как уже упоминалось, электропривод 12 может эксплуатироваться в режиме рекуперации для зарядки тяговой аккумуляторной батареи 14. В режиме рекуперации кинетическая энергия, поступающая от колес 18 через включенное сцепление 16, преобразуется в электрическую энергию. Тем самым, электропривод 12 может выступать в роли рекуперирующего устройства для восстановления энергии.
Предпочтительно, чтобы режим рекуперации представлял собой не неизменный процесс, а изменяемый, с разной степенью рекуперации. Например, режим рекуперации может быть выполнен со значениями степени рекуперации 10 %, 20 %, 30 % и 40 %. Например, в одном из режимов рекуперации 10 % доступной кинетической энергии преобразуется в электрическую энергию для зарядки тяговой аккумуляторной батареи 14. Разная степень рекуперации может быть реализована, например, за счет настройки сцепления 16. Сцепление 16 может быть выполнено, например, в виде вискомуфты.
Транспортное средство 10 дополнительно может эксплуатироваться в режиме свободного хода. В режиме свободного хода рекуперации не происходит. В режиме свободного хода тяговая аккумуляторная батарея 14 не заряжается. В режиме свободного хода в трансмиссии транспортного средства 10 может присутствовать минимально возможное сопротивление, так что транспортное средство 10 имеет возможность двигаться накатом без привода на максимально возможное расстояние. Например, режим свободного хода может быть реализован в виде движения с отключенным сцеплением 16. В качестве альтернативы или дополнительно режим свободного хода может быть реализован, например, в виде движения с отключенным электроприводом 12.
Блок 20 управления управляет работой электропривода 12, тяговой аккумуляторной батареи 14 и сцепления 16. Для управления этой работой блок 20 управления может получать информацию от разных устройств и систем транспортного средства 10.
Например, блок 20 управления может быть соединен линиями связи с системой 22 определения местоположения, навигационной системой 24, интерфейсом 26 связи, системой 28 камер, системой 30 датчиков расстояния, датчиком 32 наклона и другими устройствами 34. Линии связи могут быть выполнены в виде беспроводного или проводного соединения.
Система 22 определения местоположения может иметь вид, например, GPS-устройства (англ. global positioning system – система глобального позиционирования). С помощью системы 22 определения местоположения может определяться текущее местоположение транспортного средства 10 с последующей передачей этой информации в блок 20 управления.
Навигационная система 24 позволяет планировать, контролировать и прогнозировать маршрут следования транспортного средства 10 на основе полученных от системы 22 определения местоположения данных о местоположении транспортного средства 10. Например, в запоминающем устройстве навигационной системы 24 может храниться информация о транспортной сети (улицы, названия улиц, перекрестки и т. д.), топологии дорог (спуск, подъем, радиус поворота и т. д.) и правилах дорожного движения (ограничение максимальной скорости, право преимущественного проезда и т. д.). Также возможно, чтобы по меньшей мере некоторая информация поступала извне через интерфейс 26 связи транспортного средства. В частности, через интерфейс 26 связи также может поступать информация о состоянии дорожного движения (дорожный затор, транспортный поток, средняя скорость и т. д.).
Через интерфейс 26 связи может поступать другая информация, например, об окружающих климатических условиях (температура окружающей среды, влажность окружающей среды, инсоляция, дождь, ветер и т. д.).
Система 28 камер может регистрировать визуальную составляющую окружающего пространства перед транспортным средством 10, рядом с ним и/или за транспортным средством 10. Созданные системой 28 камер записи окружающего пространства транспортного средства 10 могут передаваться в систему распознавания образов, где происходит их анализ. В частности, система распознавания образов может быть предназначена для определения состояния дорожного движения, топологии дороги, расстояния до движущегося позади и/или впереди транспортного средства.
Например, также возможно, чтобы расстояние до движущегося впереди и/или позади транспортного средства определялось с помощью системы 30 датчиков расстояния. Система 30 датчиков расстояния может представлять собой, например, лидар (англ. light detection and ranging – обнаружение и определение дальности лазерным локатором) или радар.
Также возможно, чтобы наличие, к примеру, подъема или спуска на дороге регистрировалось с помощью датчика 32 наклона.
В других примерах осуществления изобретения для регистрации внутренних или внешних параметров транспортного средства 10 могут быть предусмотрены только некоторые устройства 22–32 и/или дополнительные устройства 34. Внутренние или внешние параметры могут быть значимыми для эксплуатации транспортного средства в режиме свободного хода и режиме рекуперации.
Если, например, водитель транспортного средства 10 больше не приводит в действие педаль акселератора (не изображена) транспортного средства 10, то транспортное средство 10 продолжает работать либо в режиме свободного хода, либо в режиме рекуперации. За счет выбора одного из режимов, подходящего к соответствующей дорожной ситуации, может быть увеличен запас хода транспортного средства 10.
В частности, здесь предлагается выбирать в каждом случае тот режим из доступных режимов, который наилучшим образом соответствует текущей дорожной ситуации с точки зрения энергии.
Для определения, какой из доступных режимов работы наилучшим образом соответствует текущей дорожной ситуации с точки зрения энергии, может учитываться баланс энергии и/или баланс эксергии транспортного средства 10. Баланс энергии и баланс эксергии могут включать данные о транспортном средстве и данные об окружающей среде. Данные о транспортном средстве могут включать, например, вес транспортного средства, массу транспортного средства, скорость транспортного средства и ускорение транспортного средства. Данные об окружающей среде могут включать значения температуры окружающей среды, инсоляции, силу и направление ветра.
Баланс энергии и эксергии основан на первом и втором началах термодинамики с учетом температуры окружающей среды. В балансе энергии и эксергии учитываются все потоки энергии и эксергии системы/подсистемы, по которым этот баланс составляется. Для общей системы (транспортного средства) и/или значимых подсистем общей системы (транспортного средства) может быть определена балансовая зона. По балансу эксергии производится качественная и количественная оценка доступной энергии. Это позволяет оптимальным образом адаптировать функции свободного хода и рекуперации к локальным и текущим граничным условиям.
Например, баланс энергии согласно первому началу термодинамики может быть составлен следующим образом.

Где:
 - тепловой поток
- тепловой поток
P - мощность
 - массовый поток
- массовый поток
 - удельная энтальпия
- удельная энтальпия
 - скорость
- скорость
 - высота
- высота
 - ускорение свободного падения
- ускорение свободного падения
Тепловой поток, в частности, относится к отдаваемому и/или получаемому суммарному тепловому потоку в анализируемой балансовой зоне. Здесь может учитываться, например, влияние температуры окружающей среды, инсоляции и кондиционера. Массовый поток относится к подводимым и отводимым массовым потокам в транспортном средстве, например, к массовому потоку тормозной жидкости и массовому потоку охлаждающего воздуха. Удельная энтальпия предназначена для учета значений теплоемкости и температуры массовых потоков. Кроме того, могут быть учтены значения скорости и положения массовых потоков транспортного средства по высоте.
Баланс эксергии может быть составлен, например, следующим образом.

Где:
 - подводимый поток эксергии
- подводимый поток эксергии
 - отводимый поток эксергии
- отводимый поток эксергии
 - прирост энергии системы
- прирост энергии системы
 - прирост энергии внешнего источника тепла
- прирост энергии внешнего источника тепла
 - мощность
- мощность
 - внутренние потери эксергии
- внутренние потери эксергии
Прирост энергии системы относится к приросту энергии транспортного средства в балансовой зоне. Прирост энергии внешнего источника тепла относится к окружающей среде транспортного средства. Внутренние потери эксергии учитывают потери за счет необратимостей.
Подводимый поток эксергии и отводимый поток эксергии в каждом случае представляют собой сумму подводимого или, соответственно, отводимого потока кинетической, потенциальной и тепловой эксергии.

Где:
 - поток кинетической эксергии
- поток кинетической эксергии
 - поток потенциальной эксергии
- поток потенциальной эксергии
 - поток тепловой эксергии
- поток тепловой эксергии
Баланс энергии и баланс эксергии транспортного средства 10 может составлять блок 20 управления. Для этого блок 20 управления может получать соответствующую информацию от устройств 22–34 и/или обращаться к информации, сохраненной в запоминающем устройстве блока 20 управления.
С помощью навигационной системы 24 может прогнозироваться (оцениваться) предстоящий маршрут следования транспортного средства 10. Например, предстоящий маршрут следования может быть определен с помощью составленного навигационной системой 24 маршрута к заданному пункту назначения. Также возможно, чтобы навигационная система 24 контролировала движение транспортного средства 10 и оценивала вероятный предстоящий маршрут следования. Учитываемая данным способом длина предстоящего маршрута следования может находиться в диапазоне, например, до 500 м, 1 кг или более. Возможно, чтобы учитываемую длину предстоящего маршрута следования мог настраивать пользователь и чтобы, в частности, она зависела от текущей скорости транспортного средства 10. Чем выше скорость транспортного средства 10, тем больше учитываемая длина предстоящего маршрута следования.
На основании составленного баланса энергии или эксергии транспортного средства 10 блок 20 управления может впоследствии определять энергию или эксергию свободного хода, а также энергию или эксергию рекуперации на предстоящем маршруте следования в соответствии с установленной длиной. Для этого в зависимости от варианта исполнения способа для расчета может использоваться разная информация о текущей и будущей дорожной ситуации транспортного средства 10.
В частности, для расчета энергии и эксергии свободного хода, а также энергии и эксергии рекуперации, может учитываться информация о текущей и прогнозируемой (будущей) дорожной ситуации. Для этого на предстоящем маршруте следования учитываются, в частности, будущие условия ускорения и/или замедления.
В текущей дорожной ситуации и будущей дорожной ситуации транспортного средства могут учитываться, к примеру, текущее состояние дорожного движения и прогнозируемое будущее состояние дорожного движения в пределах прогнозируемого предстоящего маршрута следования, а также текущая топология дороги и прогнозируемая будущая топология дороги в пределах прогнозируемого предстоящего маршрута следования.
На основании баланса энергии можно, например, принять следующее:
 Где:
Где:
 сопротивление энергии подъема транспортного средства
сопротивление энергии подъема транспортного средства
 сопротивление энергии трения
сопротивление энергии трения
Сопротивление энергии подъема учитывает сопротивление транспортного средства при движении по подъему или, соответственно, по спуску. Сопротивление энергии трения учитывает, например, сопротивление воздуха транспортного средства и сопротивление качению транспортного средства при движении накатом по асфальту и т. д.
Сопротивление энергии подъема может быть выражено следующим образом.

Где:
 - масса транспортного средства
- масса транспортного средства
- ускорение свободного падения
 угол подъема или, соответственно, спуска
угол подъема или, соответственно, спуска
 - скорость транспортного средства
- скорость транспортного средства
При торможении до полной остановки сопротивление энергии трения рассчитывается как разность кинетической энергии при текущей скорости транспортного средства и кинетической энергии при торможении до полной остановки.

При этом:
Где:
 - сопротивление транспортного средства (например, сопротивление воздуха, сопротивление качению)
- сопротивление транспортного средства (например, сопротивление воздуха, сопротивление качению)
В этом случае возможная энергия рекуперации может быть рассчитана, например, следующим образом (пример приводится только для механической части без учета энтальпийных потоков сред для балансовой зоны).

Где:
 - коэффициент полезного действия рекуперации
- коэффициент полезного действия рекуперации
Энергия свободного хода может рассчитываться, например, следующим образом.
Где:
F - (прогнозируемая) энергия свободного хода
M - масса транспортного средства
G - ускорение свободного падения
αпод. - угол подъема или, соответственно, спуска
v1 - начальная скорость транспортного средства
v2 - (прогнозируемая) конечная скорость транспортного средства
На основании составленного примерного баланса эксергии может быть также рассчитана эксергия свободного хода и эксергия рекуперации.
В этом случае для эксплуатации транспортного средства в условиях свободного хода (работа под влиянием парусности) без ожидаемого торможения правомерно то, что если энергия рекуперации на прогнозируемом участке меньше энергии функции свободного хода, если скорость транспортного средства остается неизменной, то реализуется функция свободного хода.
Для работы в условиях так называемого движения с частыми остановками, напротив, может всегда включаться рекуперация без расхода энергии на привод при торможении. Степень рекуперации может быть выбрана таким образом, чтобы транспортное средство двигалось и тормозило (с рекуперацией) на пути из точки A в точку B (например, светофор) без дополнительного расхода энергии на привод.
Например, для прогнозируемого предстоящего маршрута следования в 1 км перед транспортным средством 10 на трассе, к примеру, автомагистрали или шоссе, отсутствуют дорожные заторы или иные препятствия, требующие торможения транспортного средства 10. В этом случае блок 20 управления может рассчитать, например, энергию и/или эксергию свободного хода, которая будет больше энергии и/или эксергии рекуперации. Следовательно, транспортное средство 10 может работать в режиме свободного хода, если ну будут задействованы педаль акселератора и тормоз.
В другом примере для прогнозируемого предстоящего маршрута следования в 500 м перед транспортным средством 10 на трассе обнаружен, в частности, предстоящий подъем транспортного средства 10. В этом случае блок 20 управления может, например, определить, что эксплуатация транспортного средства 10 в режиме рекуперации энергетически нецелесообразна, так как рекуперация дополнительно замедлит транспортное средство 10 перед подъемом. Вместо этого транспортное средство 10 может двигаться в режиме свободного хода.
В дополнительном примере было обнаружено, что перед транспортным средством 10 образовался дорожный затор. В этом случае блок 20 управления может, например, определить, что работа транспортного средства 10 в режиме рекуперации энергетически более целесообразна, чем движение в режиме свободного хода.
Предпочтительно, чтобы имелась возможность принятия во внимание действующих в конкретный момент правил дорожного движения и правил, которые будут действовать дальше. Например, перед транспортным средством 10 может быть обнаружен спуск, а транспортное средство 10 уже двигается с максимально разрешенной для данного участка маршрута скоростью. В такой ситуации блок 20 управления может определить, что эксплуатация транспортного средства 10 в режиме свободного хода энергетически нецелесообразна, так как водитель сам замедлит транспортное средство 10 при превышении максимально разрешенной скорости. Вместо этого для транспортного средства 10 может быть активирован соответствующий режим рекуперации, который, в частности, позволит транспортному средству 10 двигаться по спуску, в основном, без ускорения и замедления.
Предпочтительно, чтобы существовала возможность принятия во внимание аспектов безопасности движения. Например, система 28 камер и/или система 30 датчиков расстояния могут определять расстояние до движущегося впереди и/или позади транспортного средства. Если расстояние до движущегося впереди транспортного средства слишком малое, к примеру, не достигает предельного значения расстояния в зависимости от скорости, то работа транспортного средства в режиме рекуперации более целесообразна из соображений безопасности движения, чем работа транспортного средства в режиме свободного хода. Если расстояние до движущегося позади транспортного средства слишком малое, к примеру, не достигает предельного значения расстояния в зависимости от скорости, то работа транспортного средства в режиме свободного хода более целесообразна из соображений безопасности движения.
Если будет выбран режим рекуперации, то он дополнительно может быть адаптирован на основе имеющихся данных с учетом переменной степени рекуперации. Тем самым, может быть использована наиболее оптимальная рекуперация, например, особенно высокая степень рекуперации, если требуется или потребуется сильное замедление транспортного средства.
Например, переменная степень рекуперации может быть реализована за счет применения соответствующего сцепления, которое находится между рекуперирующим устройством и по меньшей мере одним колесом с сохранением приводного соединения. Это позволит регулировать разницу частоты вращения ведущих и ведомых элементов сцепления. Сцепление может представлять собой, например, вискомуфту.
Как было описано выше, способ основан на применении предиктивной системы, с помощью которой предпринимаются попытки спрогнозировать дорожную ситуацию транспортного средства 10 в будущем, в частности, с учетом состояния дорожного движения и топологии дороги.
Также возможно, чтобы предиктивная система представляла собой самообущающуюся систему, основой которой является искусственная нейронная сеть.
За счет применения искусственной нейронной самообущающейся системы регулирования можно оптимизировать целевую функцию (целевая величина: свободный ход и/или рекуперация) и корректировать ее в определенном диапазоне с учетом возможной коррекции получения данных блоком управления.
Математическая взаимосвязь между значениями входных величин и выходных величин может определяться, например, в рамках корреляционного анализа при оптимизации целевой функции и использоваться для обучения искусственной нейронной сети, при этом целевая функция направлена на принятие решения по использованию режима свободного хода или режима рекуперации.
Несколько входных величин нейронной сети могут включать упомянутые здесь данные транспортного средства и данные окружающей среды. Дополнительно на основе корреляции между значениями входных величин и исходными значениями задаются узлы искусственной нейронной сети, при этомкорреляция определяется путем оптимизации суммарного энергопотребления транспортного средства с учетом принятия решения об использовании режима свободного хода или режима рекуперации.
Нейронная сеть может включать структуру, адаптированную к конкретной проблеме. Ее параметры автоматически определяются конкретной корреляцией между значениями входных и выходных величин. Способы обучения и внедрения нейронной сети, как правило, известны техническим специалистам по системам автоматического регулирования и управления.
Следует подчеркнуть, что в рамках изобретения также существует возможность задавать в качестве функций, сохраненных в узлах нейронной сети в виде так называемых активирующих функций, корреляционную связь вместо корреляционной матрицы. Преимущество заключается в том, что промежуточные значения входных величин не интерполируются, а могут определяться при помощи сохраненных функций.
Данное изобретение не ограничивается предпочтительными примерами осуществления, которые были описаны выше. Более того, возможно множество вариантов и модификаций, в которых также будет использована идея данного изобретения, и поэтому такие варианты будут входить в пределы правовой охраны. В частности, данное изобретение претендует на защиту предмета и признаков из зависимых пунктов формулы изобретения вне зависимости от отсылки к соответствующим пунктам формулы. В частности, признаки независимого пункта 1 формулы изобретения могут быть раскрыты независимо друг от друга. Дополнительно признаки зависимых пунктов формулы изобретения раскрываются независимо от всех признаков независимого пункта 1 и, к примеру, независимо от признаков касательно организации режима рекуперации, организации режима свободного хода, выбора режима работы и эксплуатации транспортного средства из независимого пункта 1.
Список номеров позиций
10 Транспортное средство
12 Электрический приводной узел (здесь также рекуперирующее устройство)
14 Тяговая аккумуляторная батарея
16 Сцепление
18 Колеса
20 Блок управления
22 Система определения местоположения
24 Навигационная система
26 Интерфейс связи
28 Система камер
30 Система датчиков расстояния
32 Датчик угла наклона
34 Другие устройства.
Группа изобретений относится к способу эксплуатации транспортного средства с рекуперирующим устройством и транспортному средству с блоком управления, реализующим этот способ. Способ включает: организацию режима рекуперации, организацию режима свободного хода, выбор режима работы, эксплуатацию транспортного средства в выбранном режиме работы. Выбор режима работы зависит от текущего расстояния между транспортным средством и следующим за ним транспортным средством в конкретный момент времени и/или прогнозируемой дорожной ситуации и определяется в зависимости от прогнозируемого расстояния между транспортным средством и следующим за ним транспортным средством. Достигается увеличение запаса хода транспортного средства. 2 н. и 11 з.п. ф-лы, 1 ил.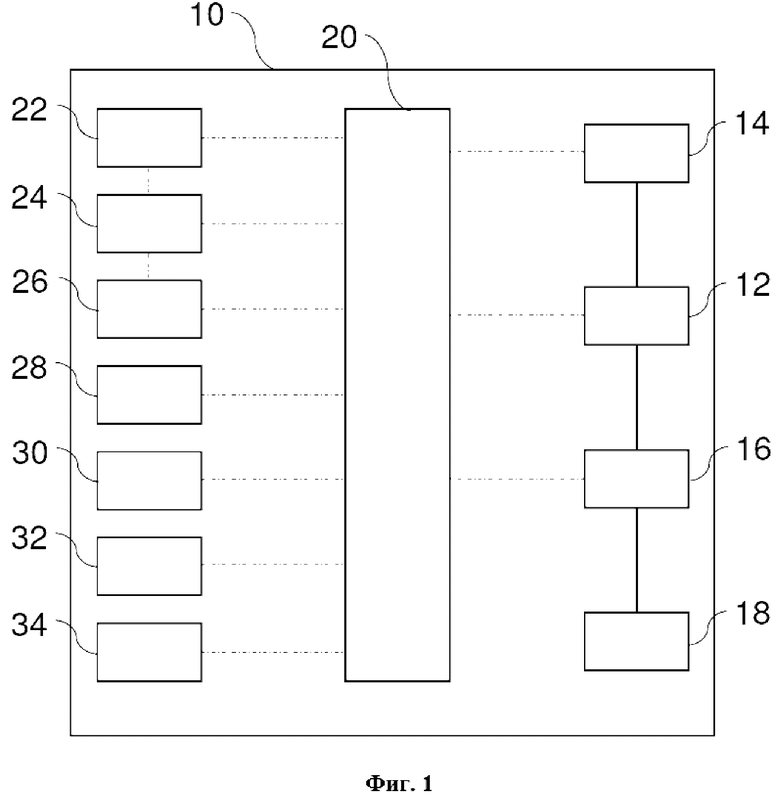
1. Способ эксплуатации транспортного средства (10) с тяговой аккумуляторной батареей (14) для приведения транспортного средства (10) в действие и с рекуперирующим устройством (12) для зарядки тяговой аккумуляторной батареи (14) путем рекуперации энергии, включающий
организацию режима рекуперации рекуперирующего устройства (12) для зарядки тяговой аккумуляторной батареи (14);
организацию режима свободного хода транспортного средства (10) без рекуперации рекуперирующим устройством (12);
выбор режима работы транспортного средства (10) между режимами свободного хода и рекуперации в зависимости от баланса энергии и/или эксергии транспортного средства (10); и
эксплуатацию транспортного средства (10) в выбранном режиме работы, при этом выбор режима работы зависит от текущей ситуации вождения автомобиля (10), которая определяется в зависимости от текущего расстояния между транспортным средством (10) и следующим за ним транспортным средством в конкретный момент времени, и/или прогнозируемая дорожная ситуация определяется в зависимости от прогнозируемого расстояния между транспортным средством (10) и следующим за ним транспортным средством.
2. Способ по п. 1, в котором
баланс энергии и/или эксергии транспортного средства (10) включает данные транспортного средства и данные о климатических условиях окружающей среды.
3. Способ по п. 1 или 2, в котором
выбор режима работы зависит от полученных данных об энергии свободного хода и/или эксергии свободного хода, а также от полученных данных об энергии рекуперации и/или об эксергии рекуперации.
4. Способ по одному из предыдущих пунктов, в котором
текущая дорожная ситуация определяется в зависимости от текущего состояния дорожного движения в конкретный момент времени и/или прогнозируемая дорожная ситуация определяется в зависимости от прогнозируемого состояния дорожного движения; и/или
текущая дорожная ситуация определяется в зависимости от текущей топологии дороги в конкретный момент времени и/или прогнозируемая дорожная ситуация определяется в зависимости от прогнозируемой топологии дороги.
5. Способ по одному из предыдущих пунктов, в котором
текущая дорожная ситуация определяется в зависимости от текущего расстояния между транспортным средством (10) и движущимся перед ним транспортным средством в конкретный момент времени и/или прогнозируемая дорожная ситуация определяется в зависимости от прогнозируемого расстояния между транспортным средством (10) и движущимся перед ним транспортным средством.
6. Способ по одному из предыдущих пунктов, в котором
текущая дорожная ситуация определяется в зависимости от по меньшей мере одного действующего в конкретный момент времени правила дорожного движения и/или прогнозируемая дорожная ситуация определяется в зависимости от по меньшей мере одного прогнозируемого правила дорожного движения.
7. Способ по одному из предыдущих пунктов, в котором
режим рекуперации выполнен с возможностью рекуперации разной величины, в частности степени рекуперации, для зарядки тяговой аккумуляторной батареи (14); в частности
выбор рекуперации режима рекуперации осуществляется в зависимости от по меньшей мере одного из параметров - баланса энергии транспортного средства (10), баланса эксергии транспортного средства (10), энергии свободного хода транспортного средства (10), эксергии свободного хода транспортного средства (10), энергии рекуперации транспортного средства (10), эксергии рекуперации транспортного средства (10), текущей и/или прогнозируемой дорожной ситуации, в которой находится транспортное средство (10), текущего и/или прогнозируемого состояния дорожного движения, текущего и/или прогнозируемого расстояния между транспортным средством (10) и следующим за ним транспортным средством и/или текущего и/или прогнозируемого расстояния между транспортным средством (10) и движущимся перед ним транспортным средством.
8. Способ по одному из предыдущих пунктов, в котором
текущая топология дороги, в частности наличие в конкретный момент времени спуска или подъема, регистрируется датчиком наклона (32) транспортного средства (10); и/или
текущее состояние дорожного движения, текущая топология дороги, текущее расстояние до следующего за транспортным средством (10) транспортного средства и/или текущего расстояния до движущегося перед транспортным средством (10) транспортного средства регистрируется системой (28) камер транспортного средства (10).
9. Способ по одному из предыдущих пунктов, в котором
выбор режима работы осуществляется предиктивной системой, в частности, предназначенной для прогнозирования будущего состояния дорожного движения, будущей топологии дороги и/или по меньшей мере одного из правил дорожного движения, которое будет действовать.
10. Способ по п. 9, в котором
предиктивная система является самообучающейся или несамообучающейся;
и/или
предиктивная система включает искусственную нейронную сеть.
11. Способ по одному из предыдущих пунктов, в котором
выбор режима работы зависит от степени износа транспортного средства (10).
12. Способ по одному из предыдущих пунктов, в котором выбор режима работы включает
прогнозирование предстоящего маршрута следования транспортного средства (10) с предстоящими условиями ускорения и/или замедления на предстоящем маршруте следования;
регистрацию энергии свободного хода и/или эксергии свободного хода для прохождения прогнозируемого предстоящего маршрута следования;
регистрацию энергии рекуперации и/или эксергии рекуперации для прохождения прогнозируемого предстоящего маршрута следования и
выбор режима работы в зависимости от полученных данных об энергии свободного хода и/или эксергии свободного хода, а также от полученных данных об энергии рекуперации и/или об эксергии рекуперации.
13. Транспортное средство (10), в частности транспортное средство хозяйственного назначения, с блоком (20) управления, выполненным для реализации способа по одному из предыдущих пунктов.
| US 2015061550 A1, 05.03.2015 | |||
| DE 102015201904 A1, 04.08.2016 | |||
| US 2011309926 A1, 22.12.2011 | |||
| CA 2997232 A1, 09.03.2017. |

