Изобретение относится к области робототехники, точнее к коллаборативным роботам, и может быть использовано в промышленности при выполнении работ в средах, недоступных или опасных для человека.
Один из наиболее простых и интуитивно понятных интерфейсов для взаимодействия человека и робота является прямой физический контакт. В этом случае сценарии поведения робота и его реакция [1] должна зависеть от а) точки взаимодействия; б) амплитуды силы взаимодействия; в) направления силы взаимодействия.
Определение точки контакта (соприкосновения, коллизии, столкновения) может быть выполнено с помощью внешних и внутренних датчиков. Внешние датчики в данном случае являются датчиками, которые добавляются к конструкции робота. Примером таких датчиков служит применение внешней камеры и использование алгоритмов компьютерного зрения [2]. Также могут быть использованы внешние датчики с определением глубины, такие как LIDAR или сенсор Kinect [3].
Таким образом, для надежного определения точки контакта подобными методами необходимо использовать и обрабатывать информацию с нескольких камер. Также частота, с которой камера получает изображения, даже без учета их последующей обработки, составляет 50 Гц для среднестатистической камеры, что может быть критическим фактором для условий работы с большими скоростями; определение направления и амплитуды взаимодействия также невозможны.
Другие, не визуальные методы локализации точки контакта включают в себя использование «искусственной кожи» [4] и нескольких акселерометров [5], расположенных по поверхности робота. В первом случае задача определения точки и силы коллизии становится тривиальной, но только для участков робота, покрытых данным сенсором, во втором случае показания с даже большого количества акселерометров не дают точного положения контакта, определение вектора внешней силы также затруднено.
Использование 6-осевого силомоментного датчика на рабочем органе робота также возможно, однако в этом случае определение силы возможно только на конечном органе робота, а сила, приложенная к промежуточной точке робота, данным датчиком не фиксируется, следовательно, ее определение и локализация точки контакта невозможны.
Известно техническое решение под названием «Обработка коллизий с помощью робота», патент № WO 2018219952 [6], приоритет DE 102017005080.5 от 29.05.2017 г. Изобретение относится к способу обработки столкновений робота с кинематической цепной структурой, содержащей по меньшей мере одну кинематическую цепь, при этом кинематическая цепная структура включает: основание, звенья, шарниры, соединяющие звенья, приводы и по меньшей мере один концевой эффектор, который имеет датчик в самом дальнем звене по меньшей мере одной из кинематических цепей для измерения / оценки силы / крутящего момента и датчиков для измерения / оценки проприоцептивных данных, при этом датчики расположены произвольно вдоль структуры кинематической цепи, способ состоит из следующих этапов: предоставить модель, описывающую динамику робота, измерить и / или оценить с помощью датчика сила / крутящий момент в самом дальнем звене хотя бы одной из кинематических цепей, - измерение и / или оценка с помощью датчиков, проприоцептивные данные: базовые и обобщенные координаты робота и их время производная, обобщенные совместные двигательные силы, внешние силы, основанные на ориентации ϕ B (t) и базовой скорости, генерировать оценку обобщенных внешних сил с помощью наблюдателя импульса на основе по крайней мере одного из проприоцептивных данных и модели, генерировать оценка второй производной от базовых и обобщенных координат робота, оценка декартова ускорения точки D на кинематической цепной структуре, компенсировать внешние силы F для эффектов динамики твердого тела и для эффектов гравитации, чтобы получить расчетный внешний гаечный ключ, компенсировать (S8) для якобиана преобразованную силу (F), чтобы получить оценку обобщенных совместных сил, возникающих в результате неожиданных столкновений, обнаружить столкновение на основе заданных пороговых значений.
Недостатком такого изобретения является то, что для определения коллизий сначала необходимо определить вектор внешней силы, по которой, определяется точка пересечения внешней силы и модели робота, а возникший шум при таком пересечении может исключить пересечения вовсе. Также существенным недостатком является то, что с помощью данного способа возможно найти коллизии только в более 6-и суставах, то есть только в самом конце робота.
Известно техническое решение, описанное в статье Лукаса Мануэлли и Расса Тедрейка, «Localizing External Contact Using Proprioceptive Sensors: The Contact Particle Filter» [7], 2018 г. В способе используются данные с проприоцептивных датчиков и контактный фильтр частиц для их обработки. Способ позволяет определить набор потенциальных мест контакта с помощью вычислений данных, полученных с проприоцептивных датчиков, с последующей их обработкой контактным фильтром частиц.
Недостатком такого технического решения является то, что на обработку полученных данных с датчиков уходит значительное время из-за того, что в таком способе отсутствует кластеризация модели робота и используется фильтр частиц, для которого требуется задавать параметры начального распределения, которые требуют больших вычислительных мощностей при проведении итерации основного цикла.
Наиболее близким техническим решением является способ, описанный в статье Адриана Цвинера, Ричарда Хантена, Корнелии Шульц и Андреаса Целль, «ARMCL: ARM Contact point Localization via Monte Carlo Localization» [8], 2019 г. В статье представлено решение по локализации точки контакта, основанное на методе локализации Монте-Карло. Для определения контакта коллоборативного робота с окружающей средой используется фильтр частиц и данные с проприоцептивного датчика, используемые в качестве входных данных. Для реализации описываемого способа необходимо заранее предоставить данные с текущими углами шарниров робота, а поле усилий должно быть установлено с текущими оценками внешнего крутящего момента.
Недостатком такого технического решения является то, что при использовании данного способа потребуется большое время на обработку полученных данных из-за того, что в способе производится оценка параметров состояния системы при минимальном среднеквадратическом отклонении и расчет дополнительных параметров, таких как конус трения, что приводит к длительной обработке данных, а при исключении параметров конуса трения данный способ будет выдавать неточные результаты.
Согласно заявляемому изобретению, предлагается способ определения силы и точки контакта коллаборативного робота с окружающей средой, в котором устранены или по меньшей мере смягчены упомянутые недостатки и который обладает рядом преимуществ по сравнению с известными аналогами.
Технической задачей является обеспечение безопасности человека в рабочей зоне робота и построение особых сценариев поведения робота при физическом взаимодействии за счет тактильного очувствления в части локализации и определения внешней силы, приложенной к произвольной точке на поверхности робота.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является увеличение степени тактильного очувствления коллаборативного робота.
Технический результат достигается тем, что в способе определения силы и точки контакта коллаборативного робота с окружающей средой, во-первых, выполняется получение информации от датчиков коллаборативного робота с последующей ее обработкой, выполняется предварительное преобразование коллаборативного робота в его виртуальную модель, в которой исключаются скрытые области, недоступные для контакта, на виртуальной модели формируется сетка с равноудаленными узловыми точками и определяется вектор нормали для каждой узловой точки, далее из упомянутых узловых точек формируются кластеры, в которых определяют центральные точки, затем определяется сила и точка контакта с использованием преобразованной модели и данных, полученных с датчиков коллаборативного робота, при этом определение точки контакта и соответствующей ей силы контакта осуществляется путем итеративного повторения следующих этапов:
- определения потенциального звена робота с контактом путем сравнения полученных данных момента силы с датчиков в шарнирах коллаборативного робота и пороговых значений момента силы;
- определения значений внешней силы для каждой центральной точки кластера;
- анализа определенных значений внешних сил внутри конуса трения для определения значения целевой функции в центральных точках кластеров;
- отбора внутренних точек кластеров, соответствующих минимальным значениям целевой функции.
Во-вторых, формирование кластеров происходит в два этапа: первый - в пространстве векторов нормали, второй - в пространстве декартового положения узловых точек.
Сущность изобретения показана на фигурах.
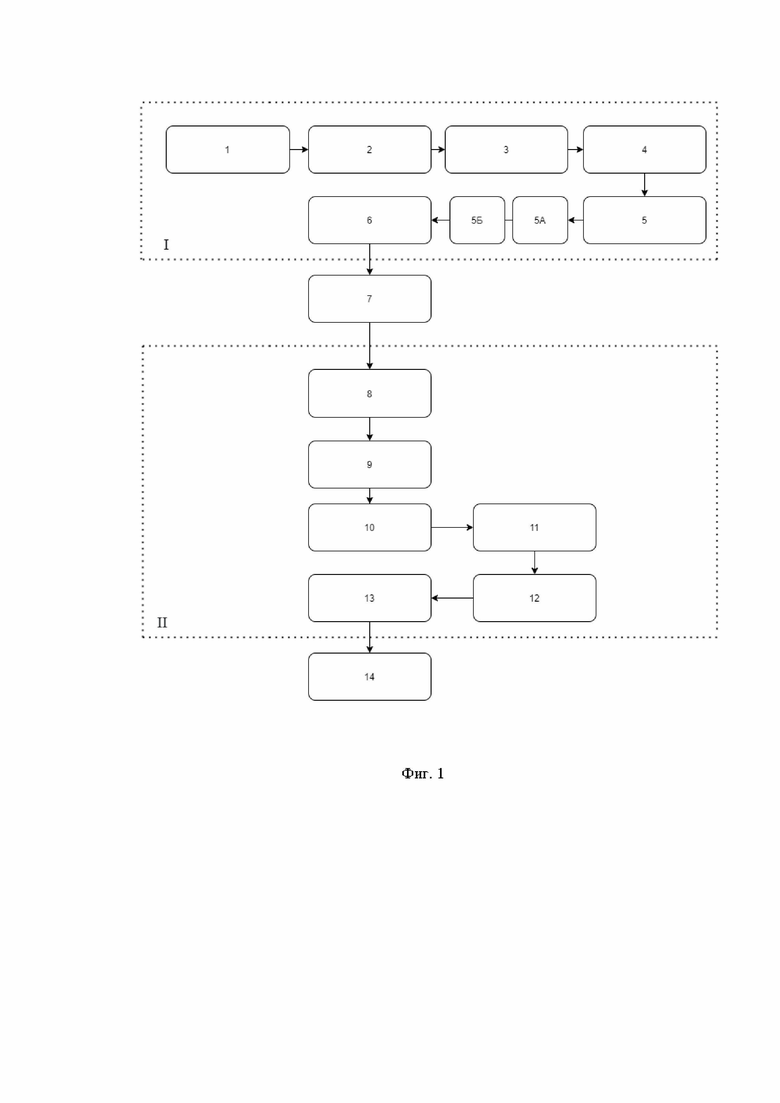
На Фиг. 1 показана общая структурная схема реализации предлагаемого способа.
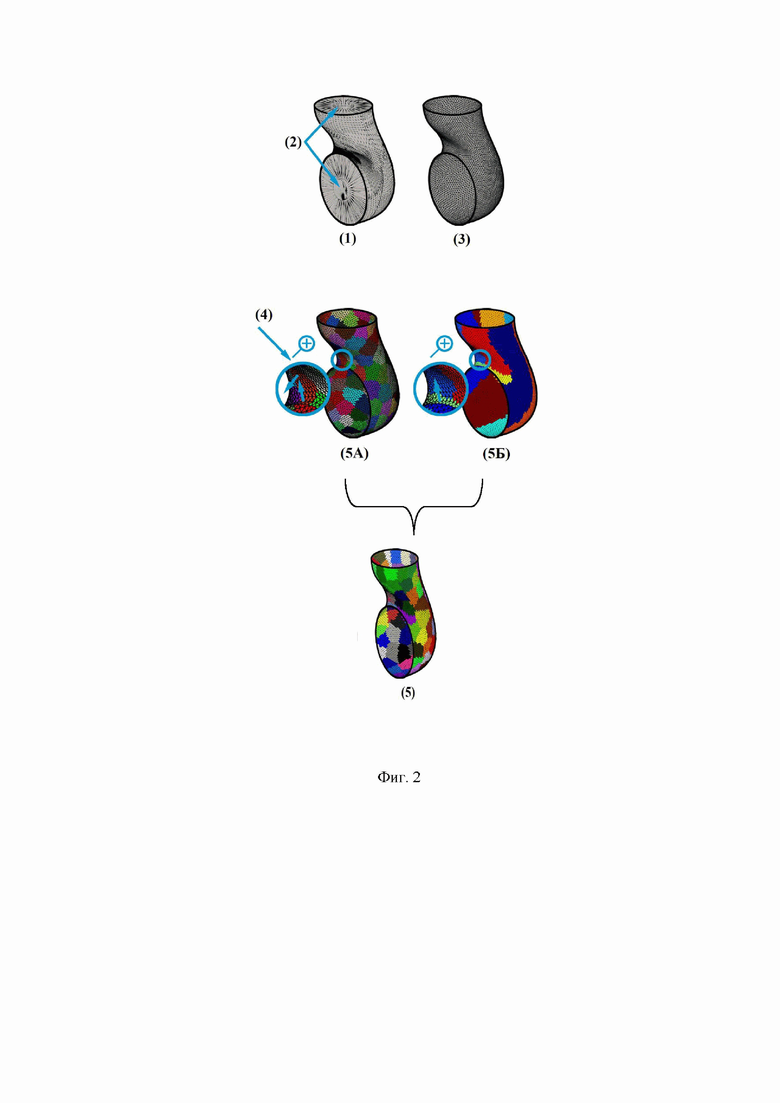
На Фиг. 2 показана кластеризация виртуальной модели коллаборативного робота (первая ступень реализации изобретения).
Изобретение работает следующим образом.
Как показано на фиг. 1, способ определения силы и точки контакта коллаборативного робота с окружающей средой содержит две ступени:
- Первая ступень (I): предварительное преобразование коллаборативного робота в виртуальную модель. Данная ступень происходит один раз для различных разновидностей коллаборативноых роботов и не требует повтора.
- Вторая ступень (II): определение силы и точки контакта на основе полученных данных с датчиков коллаборативного робота и сравнения их с виртуальной моделью, полученной посредством первой ступени (I) реализации изобретения.
На фиг. 1 и фиг. 2 первая ступень (I) - получение виртуальной модели коллаборативного робота (1), исключение скрытых областей (2), недоступных для контакта, например, внутренние механизмы коллаборативного робота. Далее на виртуальной модели формируется сетка (3) с равноудаленными узловыми точками и определяются вектора нормали (4) для каждой узловой точки. Далее происходит формирование кластеров (5) из узловых точек, которое происходит в два этапа: первый этап - в пространстве векторов нормали (5А), второй - в пространстве декартового положения узловых точек (5Б). После выделяются центральные точки (6) каждого кластера.
Процедура предварительной обработки сетки робота выполняется в автономном режиме и позволяет получить древовидную структуру для каждого звена робота.
На фиг. 1 Вторая ступень (II).
С помощью полученной на первой ступени (I) преобразованной виртуальной модели и данных (7), полученных с сенсоров (датчиков) коллаборативного робота, определяется потенциальное звено работа, имеющее контакт, путем сравнения полученных данных момента силы с датчиков в шарнирах коллаборативного робота и заданных пороговых значений момента силы при возникновении контакта или с использованием информации с предыдущего временного интервала в случае продолжающегося контакта. Далее методом наименьших квадратов определяется значение внешней силы (8) для каждой центральной точки кластера. После чего происходит анализ определенных значений внешних сил (9) внутри конуса трения (10) с последующим нахождением значения целевой функции (11) в центральных точках кластеров. Далее происходит отбор точек кластеров (12), соответствующих минимальным значениям целевой функции в центральных точках кластеров. После этого процедуру второй ступени (II) итеративно повторяется для точек каждого выбранного кластера, тем самым находится точка контакта, которая определяется как точка с минимальным значением целевой функции, и определяется соответствующая ей сила.
Настоящее изобретение позволяет увеличить степень тактильного очувствления коллаборативного робота и увеличить скорость обработки данных за счет иерархического представления модели.
Список литературы
1. Mikhel S., Popov D., Klimchik A. Collision driven multi scenario approach for human collaboration with industrial robot //Proceedings of the 2018 4th International Conference on Mechatronics and Robotics Engineering, 2018. - С. 78-84.
2. Magrini E., Flacco F., De Luca A. Control of generalized contact motion and force in physical human-robot interaction // IEEE International Conference on Robotics and Automation, 2015. -С. 2298-2304.
3. Wang X. et al. Robot manipulator self-identification for surrounding obstacle detection //Multimedia Tools and Applications. - 2017. - Т. 76. - №. 5. - С. 6495-6520.
4. Fritzsche M., Saenz J., Penzlin F. A large scale tactile sensor for safe mobile robot manipulation//The Eleventh ACM/IEEE International Conference on Human Robot Interaction, 2016. - С. 427-428.
5. McMahan W., Romano J. M., Kuchenbecker K. J. Using accelerometers to localize tactile contact events on a robot.
6. Патент № WO2018219952, приоритет DE102017005080.5 от 29.05.2017г. «Обработка коллизий с помощью робота»
7. «Localizing External Contact Using Proprioceptive Sensors: The Contact Particle Filter», Лукас Мануэлли, Расс Тедрейк, 2018г.
8. «ARMCL: ARM Contact point Localization via Monte Carlo Localization», Адриан Цвинер, Ричард Хантена, Корнелия Шульц, Андреас Целль, 2019 г
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ калибровки кинематических параметров многостепенных манипуляторов | 2019 |
|
RU2719207C1 |
| Система и способ калибровки кинематических параметров роботизированного манипулятора | 2022 |
|
RU2810082C1 |
| СПОСОБ И СИСТЕМА ЗАХВАТА ОБЪЕКТОВ С ПОМОЩЬЮ РОБОТИЗИРОВАННОГО УСТРОЙСТВА | 2020 |
|
RU2745380C1 |
| Робот-ассистированный комплекс минимально инвазивной абдоминальной хирургии для автоматизированного выполнения операций методами локальной деструкции новообразований печени | 2023 |
|
RU2841089C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ДОПОЛНЕННОЙ РЕАЛЬНОСТИ И РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2713570C1 |
| Мобильный шагающий робот | 2023 |
|
RU2834558C1 |
| КОМПЛЕКС ДЛЯ ПРОВЕДЕНИЯ ТРАНСКРАНИАЛЬНОЙ МАГНИТНОЙ СТИМУЛЯЦИИ | 2023 |
|
RU2817476C1 |
| Способ обработки данных и система технического зрения для роботизированного устройства | 2021 |
|
RU2782662C1 |
| Способ получения виртуальных моделей сложнопрофильных криволинейных поверхностей | 2023 |
|
RU2813465C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ МОБИЛЬНОГО РОБОТА НА СКЛАДЕ | 2019 |
|
RU2748441C2 |
Изобретение относится к области робототехники, точнее к коллаборативным роботам, и может быть использовано в промышленности при выполнении работ в средах, недоступных или опасных для человека. Способ включает получение информации от датчиков коллаборативного робота с последующей ее обработкой. При этом выполняется предварительное преобразование коллаборативного робота в его виртуальную модель, в которой исключаются скрытые области, недоступные для контакта. На виртуальной модели формируется сетка с равноудаленными узловыми точками и определяется вектор нормали для каждой узловой точки, далее из упомянутых узловых точек формируются кластеры, в которых определяют центральные точки. Далее определяется сила и точка контакта с использованием преобразованной модели и данных, полученных с датчиков коллаборативного робота. При этом определение точки контакта и соответствующей ей силы контакта осуществляется путем итеративного повторения следующих этапов: определения потенциального звена робота с контактом путем сравнения полученных данных момента силы с датчиков в шарнирах коллаборативного робота и пороговых значений момента силы; определения значений внешней силы для каждой центральной точки кластера; анализа определенных значений внешних сил внутри конуса трения для определения значения целевой функции в центральных точках кластеров; отбора внутренних точек кластеров, соответствующих минимальным значениям целевой функции. Техническим результатом является увеличение степени тактильного очувствления коллаборативного робота и увеличение скорости обработки данных за счет иерархического представления модели. 2 з.п. ф-лы, 2 ил. 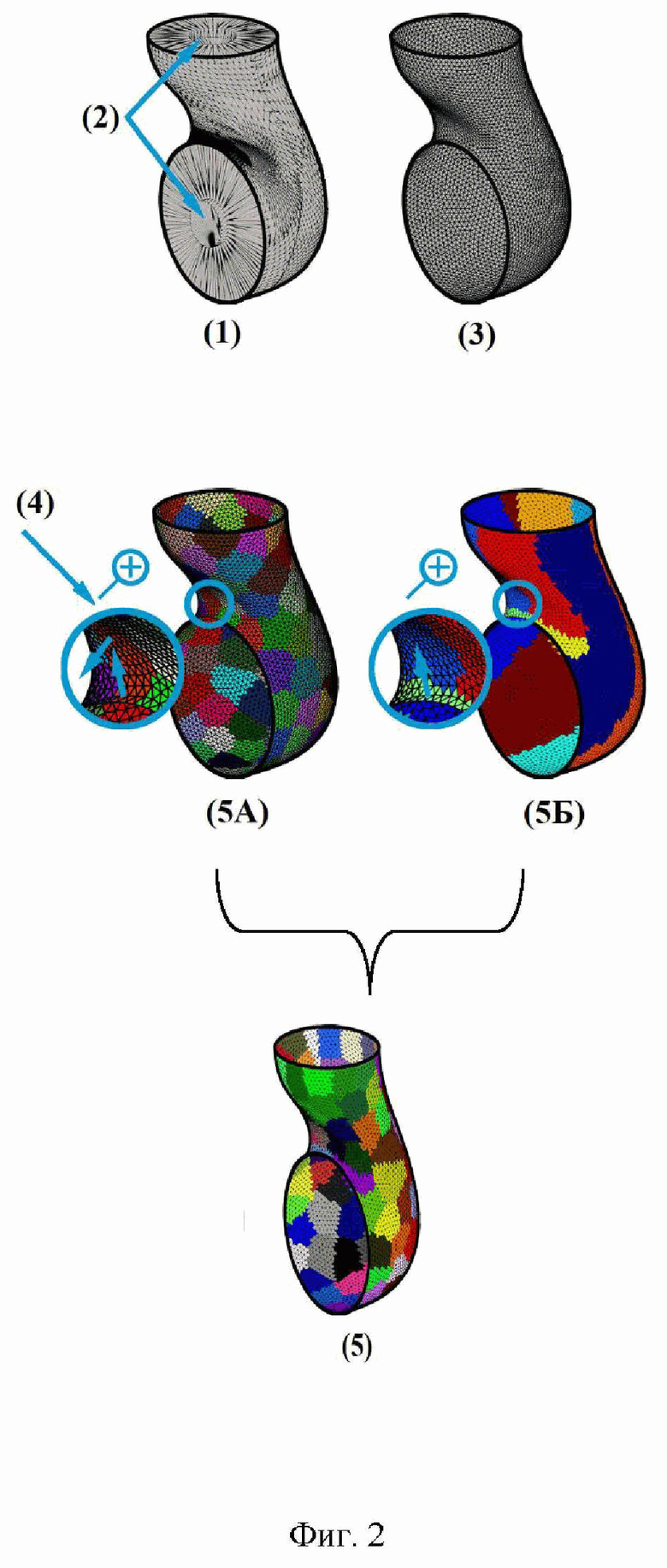
1. Способ определения силы и точки контакта коллаборативного робота с окружающей средой, включающий получение информации от датчиков коллаборативного робота с последующей ее обработкой, отличающийся тем, что выполняется предварительное преобразование коллаборативного робота в его виртуальную модель, в которой исключаются скрытые области, недоступные для контакта, на виртуальной модели формируется сетка с равноудаленными узловыми точками и определяется вектор нормали для каждой узловой точки, далее из упомянутых узловых точек формируются кластеры, в которых определяют центральные точки, затем определяется сила и точка контакта с использованием преобразованной модели и данных, полученных с датчиков коллаборативного робота, при этом определение точки контакта и соответствующей ей силы контакта осуществляется путем итеративного повторения следующих этапов:
- определения потенциального звена робота с контактом путем сравнения полученных данных момента силы с датчиков в шарнирах коллаборативного робота и пороговых значений момента силы;
- определения значений внешней силы для каждой центральной точки кластера;
- анализа определенных значений внешних сил внутри конуса трения для определения значения целевой функции в центральных точках кластеров;
- отбора внутренних точек кластеров, соответствующих минимальным значениям целевой функции.
2. Способ по п. 1, отличающийся тем, что формирование кластеров происходит в два этапа: первый - в пространстве векторов нормали, второй - в пространстве декартового положения узловых точек.
3. Способ по п. 1 и/или 2, отличающийся тем, что определение значений внешней силы для каждой центральной точки кластера осуществляется методом наименьших квадратов.
| A | |||
| Zwiener, R | |||
| Hanten, C | |||
| Schulz and A | |||
| Zell | |||
| Armcl: Arm contact point localization via monte carlo localization, 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp | |||
| Губная гармоника | 1926 |
|
SU7105A1 |
| Способ калибровки кинематических параметров многостепенных манипуляторов | 2019 |
|
RU2719207C1 |
| СПОСОБ КАЛИБРОВКИ И ПРОГРАММИРОВАНИЯ РОБОТА | 2012 |
|
RU2605393C2 |
| WO 2018219952 A1, 06.12.2018 | |||
| L | |||
| Manuelli and R | |||
| Tedrake | |||
| Localizing external | |||

