Изобретение относится к авиационной технике и предназначено для исследования в аэродинамической трубе (АДТ) нестационарного процесса раскрытия парашюта и определения основных характеристик наполнения купола: времени раскрытия, пути наполнения и динамических нагрузок при раскрытии. Из технической литературы, посвященной парашютной тематике, известно, что исследование процесса раскрытия парашюта и определение таких важнейших при создании парашютных систем (ПС) характеристик, как время раскрытия (наполнения) купола, путь наполнения (путь, проходимый ПС от начала до конца раскрытия парашюта), динамическая нагрузка при раскрытии купола может быть осуществлено в летном эксперименте путем сброса ПС с самолета, вертолета, аэростата или иного носителя, или высотного сооружения [Н.В. Лебедев. Экспериментальное исследование с моделями парашютов. Труды ЦАГИ, выпуск 100, 1931 г.; Н.А. Лобанов. Основы расчета и конструирования парашютов. Машиностроение. 1965 г.]. При этом применяют скоростную кино или видеосъемку с земли или другого летательного аппарата и специальные динамометры, использующие принцип определения нагрузки по величине отпечатка на калиброванной плашке-пластине.
Однако, исследование характеристик раскрытия парашюта в летном эксперименте имеет недостатки: эксперимент сложен, дорог и имеет низкую точность измерения параметров (погрешность ~10%), в частности, из-за неконтролируемости параметров воздушной среды в месте и в момент проведения эксперимента. Использование АДТ для этой (и идентичных) цели проще, дешевле, а, главное, информативнее. Точность измерений в АДТ выше за счет учета всех параметров воздушного потока: давления, температуры, влажности и применения для определения нагрузок тензодатчиков с малой погрешностью (~0.1%).
Известно устройство для определения в АДТ времени раскрытия и динамической нагрузки при наполнении купола парашюта, принятое в качестве прототипа. (Носарев И.М. Экспериментальное исследование аэродинамических характеристик трехкупольной парашютной системы. Сб. Парашюты и проницаемые тела. Институт механики МГУ. Изд. МГУ. 1980). Оно состоит из установленной в плоскости симметрии рабочей части АДТ и жестко скрепленной с ее стенками обтекаемой державки с площадкой, к которой крепится камера-контейнер (или чехол) с уложенным в нее испытываемым парашютом (купол и стропы, сложенные в жгут). В качестве державки используют также тросовую подвеску. С камерой-контейнером соединен вытяжной парашют, находящийся в потоке. Концы строп (коуш) испытываемого парашюта связаны через вертлюг (если парашют вращается) и тензодатчик с державкой. Тензодатчик соединен с информационно-измерительной системой (ИИС) электрическим кабелем. Камера-контейнер прикреплена к державке (или площадке) дистанционно управляемым замком, либо разрывным элементом и резаком. На заданной скорости потока подается сигнал на замок, вытяжной парашют стягивает камеру-контейнер с испытываемого парашюта, стропы и купол попадают в поток, и купол начинает наполняться. Тензодатчик с помощью ИИС фиксирует изменение динамической нагрузки в коуше парашюта в процессе его наполнения. Определяется максимальная величина нагрузки, а с помощью видео или кинокамеры фиксируется фаза наполнения, соответствующая максимальной нагрузке, и время наполнения.
Устройство имеет следующие недостатки. Наполнение происходит при постоянной скорости потока: в действительности она падает. Это приводит к ошибке в определении динамической нагрузки и времени наполнения. Во-вторых, из-за того, что парашют через тензодатчик соединен с державкой, а через нее с силовыми элементами рабочей части АДТ, имеющими значительную массу, превышающую на несколько порядков массу реально приземляемого на исследуемом парашюте груза, зарегистрированная динамическая нагрузка оказывается завышенной. Пересчет таким образом полученной в АДТ нагрузки на реальные условия наполнения - до конца нерешенная сложная методическая задача: в этом случае не обеспечивается подобие процессов в эксперименте в АДТ и в натурных условиях. Время наполнения с помощью описанного устройства определяется с низкой точностью из-за постоянства скорости и скоростного напора потока, обтекающего парашют, так как парашют зафиксирован. По этой же причине не определяется путь наполнения, а эта величина - важная характеристика, определяющая минимально-безопасную высоту применения ПС.
Настоящее изобретение предназначено для исследования в аэродинамической трубе нестационарного процесса раскрытия парашюта и определения основных характеристик наполнения купола: времени раскрытия, пути наполнения и динамической нагрузки при раскрытии.
Техническим результатом является:
- повышение точности определения динамической нагрузки при раскрытии парашюта и времени наполнения парашюта за счет учета влияния на процесс раскрытия массы присоединенного к парашюту груза;
- определение пути наполнения парашюта.
Технический результат достигается тем, что в устройстве для определения характеристик раскрытия парашюта в аэродинамической трубе, содержащем державку с площадкой, камеру-контейнер (с исследуемым парашютом), прикрепленную к площадке дистанционно управляемым замком, вытяжной парашют, присоединенный к камере-контейнеру, тензодатчик, соединенный с информационно-измерительной системой электрическим кабелем, вертлюг, видеокамеру, так, что устройство снабжено поддерживающим тросом, натянутым вдоль потока в рабочей части, жестко прикрепленным к силовым элементам аэродинамической трубы и выполненным с возможностью перемещения вдоль него вытяжного и испытываемого парашютов, на поддерживающем тросе закреплены кольца, сквозь которые проходит пропущенное через блоки гибкое звено, соединяющее груз, размещенный в обтекателе вне потока, и неподвижную часть вертлюга, подвижная часть которого жестко соединена с диском, выполненным с возможностью крепления концов строп испытываемого парашюта (уложенного в камеру-контейнер), к периферийной части диска, причем в гибкое звено встроен тензодатчик, а поддерживающий трос проходит через отверстия: в куполах вытяжного и исследуемого парашютов, в камере-контейнере, в диске, в подвижной и неподвижной частях вертлюга, а в боковой и продольной плоскостях рабочей части аэродинамической трубы установлены синхронизированные скоростные видеокамеры, оптические оси которых ориентированы на зону перемещения испытываемого парашюта при наполнении.
Технический результат достигается тем, что гибкое звено снабжено нанесенными на него с постоянным шагом магнитными метками и пропущено через катушку индуктивности, включенную в измерительную цепь информационно-измерительной системы.
Технический результат достигается тем, что обтекатель снабжен демпфером и упором-ограничителем.
Технический результат достигается тем, что поддерживающий трос прикреплен к державке и к силовым элементам рабочей части аэродинамической трубы.
Технический результат достигается тем, что концы строп испытываемого парашюта закреплены в отверстиях на периферийной части диска с помощью крепежных карабинов или узлов.
Перечень фигур
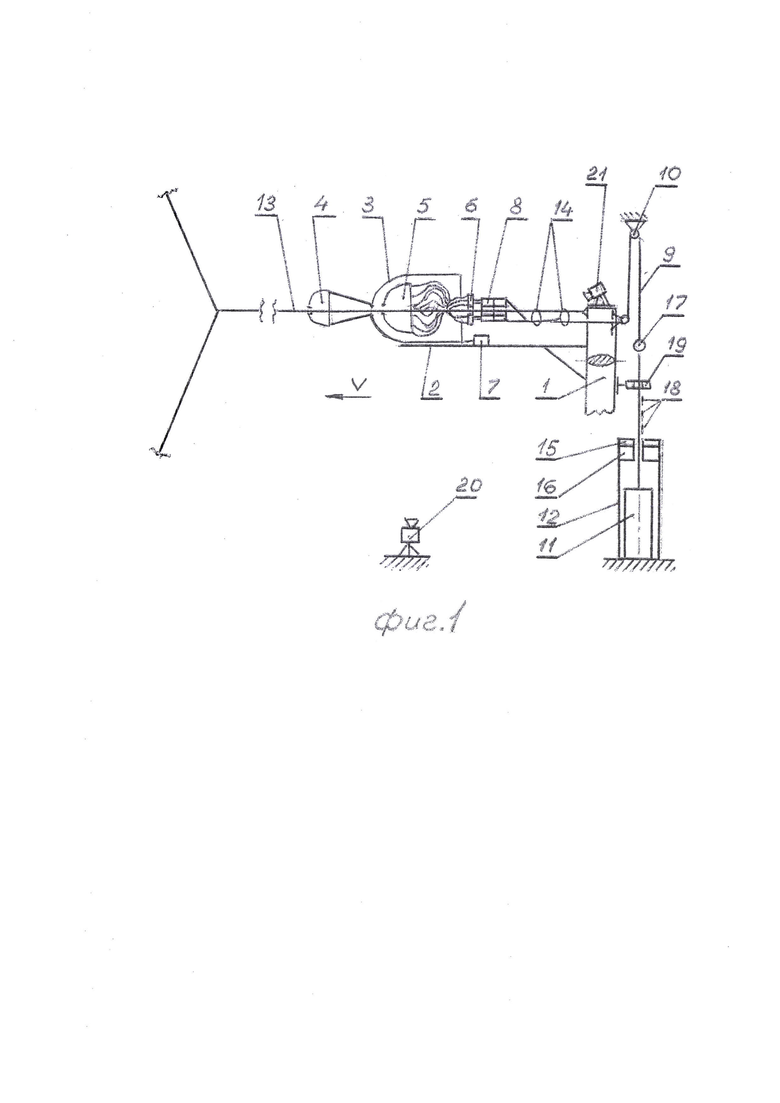
Фиг. 1 - Схема предлагаемого устройства (вид сбоку)
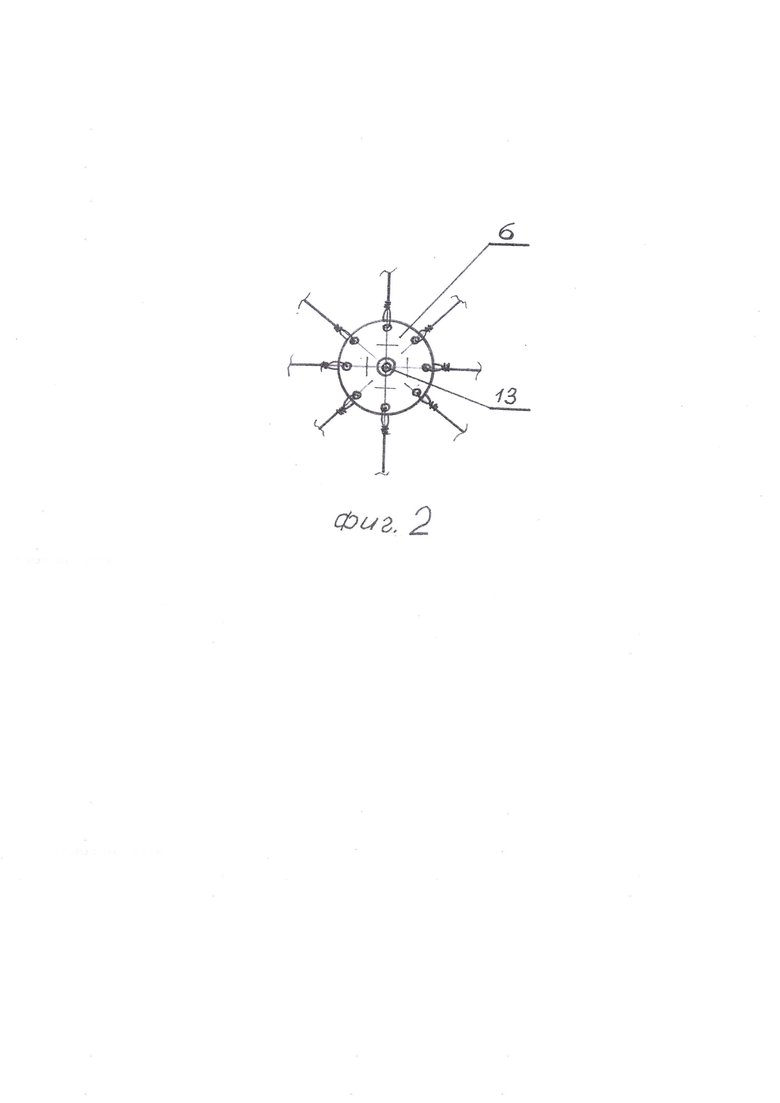
Фиг. 2 - Диск (вид по потоку)
Устройство состоит из установленной в плоскости симметрии рабочей части АДТ обтекаемой державки 1, на площадке 2 которой вблизи продольной оси сопла закреплена камера-контейнер 3 с присоединенным к ней вытяжным парашютом 4 и уложенным в нее испытываемым парашютом 5, состоящим из купола, и строп (фиг. 1). Обтекаемая державка 1 может быть выполнена в упрощенном виде - в виде тросовой подвески - системы тросов, закрепленных на силовых элементах рабочей части АДТ. Концы строп испытываемого парашюта 5 размещены вне камеры-контейнера 3 и закреплены на периферии диска 6 в имеющихся там отверстиях либо узлами, либо с помощью крепежных карабинов на концах строп (фиг. 2). Диск 6 имеет отверстие в центре. Камера-контейнер 3 прикреплена к площадке 2 державки 1 с помощью дистанционно управляемого замка 7, соединенного с пультом управления (не показан). Вместо замка 7 может быть использован электрорезак и разрывной элемент (не показаны). Диск 6 жестко соединен с подвижной частью вертлюга 8 с помощью крепежных винтов (не показаны). Неподвижная часть вертлюга 8 соединена с гибким звеном 9, проходящим через блоки 10 с малым трением и закрепленном на грузе 11, размещенным вне потока, в обтекателе 12, на его нижнем торце. Масса груза 11 равна массе полезного груза, приземляемого на испытываемом парашюте 5 исследуемой ПС, или в случае модели ПС подбирается по коэффициенту масштаба и критерию подобия. Обе части вертлюга 8 имеют сквозное отверстие в центре, соосное с отверстием диска 6. Наличие вертлюга 8 позволяет проводить испытания с испытываемыми парашютами 5, которые могут вращаться при наполнении. Для невращающихся парашютов 5 верглюг 8 может быть исключен, и диск 6 соединен непосредственно с гибким звеном 9. Купол вытяжного парашюта 4, камера-контейнер 3, купол испытываемого парашюта 5 также имеют отверстия в центре. Для устранения проседания вниз испытываемого парашюта 5 при наполнении из-за силы тяжести, в рабочей части АДТ с горизонтальной продольной осью вдоль потока натянут горизонтально прикрепленный к силовым элементам АДТ и державке 1 поддерживающий трос 13. Он проходит через отверстия: в куполе вытяжного парашюта 4, в камере-контейнере 3, в куполе испытываемого парашюта 5 (через полюсное отверстие), в диске 6 и вертлюге 8. На поддерживающем тросе 13 закреплены с равным шагом кольца 14, в которые проходит гибкое звено 9 - для уменьшения его провисания при движении испытываемого парашюта 5 по потоку. Перемещение груза 11 ограничивается в обтекателе 12 упором-ограничителем 15 с демпфером 16. В гибкое звено 9 вставлен тензодатчик 17. На гибкое звено 9 нанесены магнитные метки 18 с постоянным шагом. Гибкое звено 9 пропущено через катушку индуктивности 19, включенную, как и тензодатчик 17, в измерительную цепь ИИС, которая соединена с пультом и видеокамерами 20,21.
В боковой и продольной плоскостях рабочей части АДТ установлены скоростные видеокамеры 20, 21, синхронизированные с тензодатчиком 17 и катушкой индуктивности 19. Для определения пути наполнения испытываемого парашюта 5 оптические оси видеокамер 20, 21 ориентированы на зону перемещения испытываемого парашюта 5 по поддерживающему тросу 13 при его наполнении. Расстояние от начального положения груза 11 до демпфера 16 и упора-ограничителя 15 подбирается, исходя из предполагаемого (расчетного) пути наполнения испытываемого парашюта 5 и проверяется в предварительном эксперименте.
АДТ оснащена системами определения с высокой точностью параметров потока: давления, температуры, влажности воздуха в рабочей части АДТ.
Устройство функционирует следующим образом. Перед началом эксперимента подбирают массу груза 11 так, чтобы обеспечить подобие процессов наполнения испытываемого парашюта 5 и реального объекта, приземляемого на ПС (если испытывается модель ПС), и устанавливают расстояние от груза 11 до демпфера 16, исходя из расчетного значения пути наполнения испытываемого парашюта 5. Пропускают поддерживающий трос 13 через отверстия: в куполе вытяжного парашюта 4, в камере-контейнере 3, в куполе испытываемого парашюта 5 (через полюсное отверстие), в диске бив вертлюге 8. Закрепляют концы поддерживающего троса 13 на державке 1 и на силовых элементах АДТ (не показаны). Испытываемый парашют 5 укладывают в камеру-контейнер 3 и присоединяют к ней вытяжной парашют 4. Концы строп испытываемого парашюта 5 закрепляют с помощью крепежных карабинов или узлов в отверстиях на периферийной части диска 6. Камеру-контейнер 3 закрепляют на площадке 2 державки 1 с помощью дистанционно-управляемого замка 7, включенного в цепь пульта управления. Один конец гибкого звена 9 соединяют с неподвижной частью вертлюга 8, а другой - через блоки 10 - с грузом 11. Устраняют провисание гибкого звена 9, продевая его в кольца 14. Включают регистрирующую аппаратуру: скоростные видеокамеры 20,21, ИИС, подают напряжение на тензодатчик 17 и катушку индуктивности 19, запускают АДТ. На заданной скорости потока подают напряжение на дистанционно управляемый замок 7. Он освобождает камеру-контейнер 3 от связи с площадкой 2 державки 1, наполненный вытяжной парашют 4 стягивает камеру-контейнер 3 с испытываемого парашюта 5. Его купол и стропы попадают в поток, и купол начинает наполняться, перемещаясь по потоку по поддерживающему тросу 13. Под действием возникшей и увеличивающейся силы сопротивления испытываемого парашюта 5 натянутое гибкое звено 9 начинает поднимать с ускорением груз 11. Начальный скоростной напор, воздействующий на испытываемый парашют 5, падает из-за его собственной скорости перемещения, но площадь миделя купола увеличивается, и аэродинамическое сопротивление растет, скорость парашюта относительно потока уменьшается до стационарного значения. Перемещение испытываемого парашюта 5 по горизонтальному поддерживающему тросу 13 при раскрытии обеспечивает его куполу нулевой угол атаки и идентичность трубного эксперимента процессу наполнения при вертикальном снижении ПС. Тензодатчик 17 регистрирует с помощью ИИС изменение динамической нагрузки в гибком звене 9 при наполнении купола, также ИИС отмечает моменты прохождения магнитных меток 18 на гибком звене 9 мимо катушки индуктивности 19. Это позволяет после обработки этих данных определить скорость движения испытываемого парашюта 5 с грузом 11, фактическую скорость обтекания купола потоком и реальное изменение скоростного напора, воздействующего на испытываемый парашют 5. Длина участка перемещения груза 11 подбирается так, чтобы испытываемый парашют 5 успевал полностью наполниться, прежде чем груз 11 достигнет демпфера 16. После остановки груза 11 упором-ограничителем 15 скорость потока АДТ сбрасывается до нуля, испытываемый парашют 5 укладывается в камеру-контейнер 3, она фиксируется дистанционно управляемым замком 7 на площадке 2. Груз 11 возвращается в исходное положение - на торец обтекателя 12. Опыт повторяется при измененной скорости потока АДТ и/или массе груза 11.
С помощью видеосъемки скоростными видеокамерами 20, 21 и по записи нагрузки тензодатчиком 17 определяют время раскрытия, путь наполнения, динамическую нагрузку наполнения и фазу раскрытия, соответствующую максимуму нагрузки. Величина пути наполнения определяется из расшифровки кадров видеокамеры 20 боковой проекции, а время раскрытия - камеры 21 продольной проекции. Анализ полученных материалов позволяет определить основные характеристики парашютной системы: время и путь наполнения, нагрузку при раскрытии.
Таким образом, заявленная совокупность признаков необходима и достаточна для достижения технического результата: - повышения точности определения динамической нагрузки при раскрытии парашюта и времени раскрытия за счет учета влияния массы присоединенного к парашюту груза; - определения пути наполнения.
ПЕРЕЧЕНЬ ПОЗИЦИЙ
1 - державка
2 - площадка
3 - камера-контейнер
4 - вытяжной парашют
5 - испытываемый парашют
6 - диск
7 - дистанционно управляемый замок
8 - вертлюг
9 - гибкое звено
10 - блок
11 - груз
12 - обтекатель
13 - поддерживающий трос
14 - кольца
15 - упор-ограничитель
16 - демпфер
17 - тензодатчик
18 - магнитные метки
19 - катушка индуктивности
20 - видеокамера боковой проекции
21 - видеокамера продольной проекции.
Изобретение относится к авиационной технике и предназначено для исследования процесса раскрытия парашюта в аэродинамической трубе и определения основных характеристик наполнения купола. Устройство содержит державку, на которой закреплена камера-контейнер с вытяжным парашютом, в камеру уложен испытываемый парашют, стропы которого через диск, вертлюг и тензодатчик соединены гибким звеном с грузом, размещенным в обтекателе вне потока. Свозь полюсные отверстия вытяжного и испытываемого парашютов, свозь камеру, диск и вертлюг пропущен натянутый по потоку горизонтально поддерживающий трос, прикрепленный к державке. На гибкое звено нанесены магнитные метки, оно проходит через кольца, закрепленные на поддерживающем тросе, и через катушку индуктивности, включенную в измерительную цепь. Используются скоростные видеокамеры, установленные в продольной и боковой плоскостях. Технический результат заключается в повышении точности определения динамической нагрузки при раскрытии парашюта и времени наполнения парашюта за счет учета влияния на процесс раскрытия массы присоединенного к парашюту груза, определении пути наполнения парашюта. 4 з.п. ф-лы, 2 ил. 
1. Устройство для определения характеристик раскрытия парашюта в аэродинамической трубе, содержащее державку с площадкой, камеру-контейнер с исследуемым парашютом, прикрепленную к площадке дистанционно управляемым замком, вытяжной парашют, присоединенный к камере-контейнеру, тензодатчик, соединенный с информационно-измерительной системой электрическим кабелем, вертлюг, видеокамеру, отличающееся тем, что устройство снабжено поддерживающим тросом, натянутым вдоль потока в рабочей части, жестко прикрепленным к силовым элементам аэродинамической трубы и выполненным с возможностью перемещения вдоль него вытяжного и испытываемого парашютов, на поддерживающем тросе закреплены кольца, сквозь которые проходит пропущенное через блоки гибкое звено, соединяющее груз, размещенный в обтекателе вне потока, и неподвижную часть вертлюга, подвижная часть которого жестко соединена с диском, выполненным с возможностью крепления концов строп испытываемого парашюта к периферийной части диска, причем в гибкое звено встроен тензодатчик, а поддерживающий трос проходит через отверстия: в куполах вытяжного и исследуемого парашютов, в камере-контейнере, в диске, в подвижной и неподвижной частях вертлюга, а в боковой и продольной плоскостях рабочей части аэродинамической трубы установлены синхронизированные скоростные видеокамеры, оптические оси которых ориентированы на зону перемещения испытываемого парашюта при наполнении.
2. Устройство по п. 1, отличающееся тем, что гибкое звено снабжено нанесенными на него с постоянным шагом магнитными метками и пропущено через катушку индуктивности, включенную в измерительную цепь информационно-измерительной системы.
3. Устройство по п. 1, отличающееся тем, что обтекатель снабжен демпфером и упором-ограничителем.
4. Устройство по п. 1, отличающееся тем, что поддерживающий трос прикреплен к державке.
5. Устройство по п. 1, отличающееся тем, что концы строп испытываемого парашюта закреплены в отверстиях на периферийной части диска с помощью крепежных карабинов или узлов.
| Носарев И.М | |||
| Экспериментальное исследование аэродинамических характеристик трехкупольной парашютной системы | |||
| Сб | |||
| "Парашюты и проницаемые тела" | |||
| Институт механики МГУ | |||
| Изд | |||
| МГУ | |||
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Устройство для определения аэродинамических характеристик планирующего парашюта в аэродинамической трубе | 2019 |
|
RU2714529C1 |
| Устройство для измерения аэродинамических характеристик планирующего парашюта в аэродинамической трубе, модель планирующего парашюта для испытаний в аэродинамической трубе, способ измерения аэродинамических характеристик планирующего парашюта в аэродинамической трубе | 2017 |
|
RU2655713C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ БОКОВЫХ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ПЛАНИРУЮЩЕГО ПАРАШЮТА В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ | 1993 |
|
RU2072947C1 |
| CN 112198334 A, 08.01.2021 | |||
| Н.В | |||
| Лебедев | |||
| Экспериментальное исследование с моделями | |||

