Изобретение относится к весоизмерительной технике и может быть использовано для определения массы груза, поднимаемого грузоподъемной машиной.
Известен метод контроля массы груза подъемной машины, который реализуется устройством, включающим траверсу крана, грузотранспортный механизм, весоизмерительное средство с силоизмерительными тензодатчиками весовых нагрузок, преобразовательный блок, электрически связанный с силоизмерительными тензодатчиками, и световое табло отображения весовых нагрузок. При этом устройство имеет два весоизмерительных узла и балку, соединяющую их, каждый из весоизмерительных узлов состоит из тензодатчика, к которому присоединены сверху и снизу скобы, в которые вставлены кольца, нижнее кольцо установлено на ось подъемного блока траверсы крана, верхнее кольцо установлено на ось балки устройства, на балке устройства установлен вторичный преобразователь, связанный со светодиодным табло для отображения значения текущего веса (Патент РФ №2426077 С1, дата приоритета 14.12.2009, дата публикации 10.08.2010, авторы: Потытняков С.И. и др., RU).
Недостатками аналога являются: сложность конструкции в виде двух весоизмерительных узлов; необходимость встраивания тензодатчиков в весоизмерительные узлы; невысокая надежность и точность измерения, как следствие, сложности конструкции и электрической схемы устройства; наличие кабелей связи для передачи сигнала от тензодатчика.
Известен метод определения массы груза, висящего на подъемном канате крана, принятый в качестве прототипа и реализуемый системой регистрации массы груза, включающей измерительную систему для измерения усилия в канате и вычислительное устройство для определения массы груза по усилию в канате. Вычислительное устройство снабжено блоком компенсации, который описывает в модели и, по меньшей мере, частично компенсирует воздействие косвенного определения массы груза по усилию в канате. Блок компенсации включает компенсацию массы каната, которая учитывает при расчете массы груза собственный вес подъемного каната и, в частности, воздействие изменения длины каната при подъеме и/или опускании груза (Патент РФ №2537728 С2, дата приоритета 15.09.2010, дата публикации 10.01.2015, авторы: Шнайдер Клаус (DE) и др., прототип).
Недостатком прототипа является сложность вычислительного устройства для определения массы груза по усилию в канате в связи с необходимостью включения в устройство блока компенсации для обеспечения точности при регистрации массы груза.
Технической проблемой является создание динамического метода контроля массы груза подъемной машины, не требующего сложного оборудования и свободного от вышеназванных недостатков аналогов, а также обеспечивающего точность контроля массы груза.
Изобретение направлено на обеспечение возможности контроля массы груза в процессе его вертикального подъема с грузом.
Изобретение базируется на установленной закономерности зависимости крутящего момента, а соответственно, угловых ускорений ротора приводного электродвигателя от нагрузки электродвигателя (L) и угла поворота ротора относительно нулевых точек (ф) при конкретной угловой скорости ротора приводного электродвигателя, которые описаны в работе сотрудников национального университета Пусана [Um, D.Y., Park, G.S. Comparison of Electromagnetic Characteristics of Single-Phase Induction Motor between Balanced and Unbalanced Operation under Different Loads. Energies 2021, 14, 919. DOI: 10.3390/enl4040919].
Так как в процессе движения ротора приводного электродвигателя его ускорения в течение одного оборота будут меняться пропорционально изменению нагрузки, то, следовательно, будут меняться и линейные ускорения поднимаемого груза.
Сущность изобретения заключается в том, что масса груза подъемной машины определяется как произведение массы устройства фиксации груза на отношение разности ускорения, сообщаемого устройству фиксации груза при конкретной угловой скорости ротора и конкретном законе изменения амплитуды и частоты питающего приводной электродвигатель подъема напряжения, и, ускорения, сообщаемого устройству фиксации груза с жестко зафиксированным на нем грузом при конкретной угловой скорости ротора при том же конкретном законе изменения амплитуды и частоты питающего приводной электродвигатель подъема напряжения, к сумме ускорения, сообщаемого устройству фиксации груза с жестко зафиксированным на нем грузом при конкретной угловой скорости ротора при том же конкретном законе изменения амплитуды и частоты питающего приводной электродвигатель подъема напряжения, и ускорения свободного падения.
Новизна изобретения состоит в том, что измеряя вертикальное ускорение устройства фиксации груза (например, крюк крана, лифтовая кабина, кабина шахтного подъемника и т.д.) известной массы в процессе подъема при конкретной угловой скорости ротора ω при конкретном законе изменения напряжения и частоты питающего приводной электродвигатель подъема напряжения и измеряя вертикальное ускорение устройства фиксации груза известной массы с зафиксированным в нем грузом неизвестной массы в процессе подъема при конкретной угловой скорости ротора ω при том же конкретном законе изменения напряжения и частоты питающего приводной электродвигатель подъема напряжения определяют неизвестную массу груза.
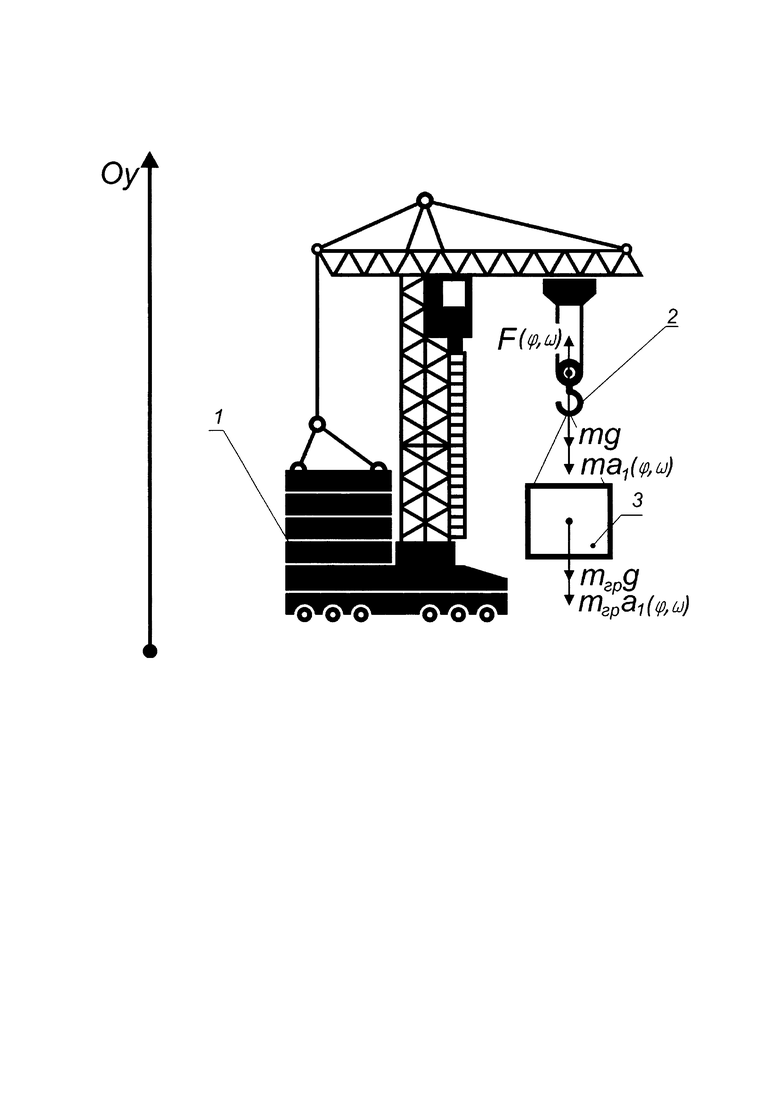
На чертеже изображена схема реализации предлагаемого динамического метода контроля массы груза подъемной машины.
Подъемная машина 1 снабжена устройством фиксации груза 2, на котором зафиксирован груз неизвестной массы 3.
Реализуется предлагаемый динамический метод контроля массы груза подъемной машины следующим образом.
На начальном этапе на устройстве фиксации груза 2 не происходит фиксирование груза неизвестной массы 3. Устройству фиксации груза 2 массой m при подъеме при конкретной угловой скорости ротора ω при конкретном законе изменения напряжения и частоты питающего приводной электродвигатель подъема напряжения сообщается ускорение а(ϕ, ω) пропорционально ускорению ротора электродвигателя подъемной машины в зависимости от угла его поворота ϕ.
Затем устройство фиксации груза 2 массой m возвращают на высоту начала осуществления начального этапа и фиксируют на нем груз неизвестной массы 3 массой mгр. Устройству фиксации груза 2 и жестко зафиксированному на нем грузу неизвестной массы 3 при подъеме при конкретной угловой скорости ротора ω при том же конкретном законе изменения напряжения и частоты питающего приводной электродвигатель подъема напряжения сообщается ускорение a1(ϕ, ω) пропорционально ускорению ротора электродвигателя подъемной машины в зависимости от угла его поворота ϕ.
Силу, прикладываемую к устройству фиксации груза 2 и грузу неизвестной массы 3, со стороны приводного электродвигателя подъема в зависимости от угла поворота ротора электродвигателя ϕ при конкретной угловой скорости ротора ω обозначим через F(ϕ, ω).
Запишем проекции действующих сил на ось Оу для первого и второго подъемов:


g - ускорение свободного падения.
Так как закон изменения напряжения и частоты питающей сети в процессе первого и второго подъемов был идентичным, то сила F(ϕ, ω), прикладываемая со стороны приводного электродвигателя подъема при повороте на один и тот же угол ϕ, развивалась при первом и втором подъеме одна и та же.
Приравнивая (1) к (2), определяем неизвестную массу mгр:

Предлагаемый динамический метод контроля массы груза подъемного устройства позволит сигнализировать о превышении допустимой массы груза непосредственно при начале и в процессе подъема груза.
Технический результат - возможность контроля массы груза подъемного устройства путем измерения вертикального ускорения устройства фиксации груза известной массы и измерения вертикального ускорения устройства фиксации груза известной массы с зафиксированным в нем грузом неизвестной массы в процессе подъема при идентичных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕИЗВЕСТНОЙ МАССЫ ГРУЗА, ТРАНСПОРТИРУЕМОЙ КОНВЕЙЕРОМ | 2021 |
|
RU2780981C1 |
| ДИНАМИЧЕСКИЙ МЕТОД КОНТРОЛЯ ОБЩЕЙ МАССЫ ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2021 |
|
RU2778700C1 |
| ДИНАМИЧЕСКИЙ МЕТОД КОНТРОЛЯ МАССЫ ГРУЗА КОЛЕСНОЙ МАШИНЫ | 2021 |
|
RU2781899C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2312055C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2011910C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ ГРУЗА, ПЕРЕВОЗИМОГО КОЛЕСНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2011 |
|
RU2451267C1 |
| МАШИНА ДЛЯ ИСПЫТАНИЯ ОБРАЗЦОВ НА УСТАЛОСТЬ | 2001 |
|
RU2204818C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ И КООРДИНАТ ЦЕНТРА МАСС ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2348020C1 |
| СПОСОБ ИЗМЕРЕНИЯ МОЩНОСТИ ПОТЕРЬ ЭНЕРГИИ В ПОДШИПНИКАХ КАЧЕНИЯ | 2012 |
|
RU2507493C2 |
| НАКЛОННАЯ ПОДЪЕМНАЯ УСТАНОВКА | 2012 |
|
RU2500890C2 |
Изобретение относится к весоизмерительной технике и может быть использовано для определения массы груза, поднимаемого грузоподъемной машиной. Сущность: масса груза подъемной машины определяется как произведение массы устройства фиксации груза на отношение разности ускорения, сообщаемого устройству фиксации груза при конкретной угловой скорости ротора и конкретном законе изменения амплитуды и частоты питающего приводной электродвигатель подъема напряжения, и, ускорения, сообщаемого устройству фиксации груза с жестко зафиксированным на нем грузом при конкретной угловой скорости ротора при том же конкретном законе изменения амплитуды и частоты питающего приводной электродвигатель подъема напряжения, к сумме ускорения, сообщаемого устройству фиксации груза с жестко зафиксированным на нем грузом при конкретной угловой скорости ротора при том же конкретном законе изменения амплитуды и частоты питающего приводной электродвигатель подъема напряжения, и ускорения свободного падения. Технический результат: возможность контроля массы груза подъемного устройства путем измерения вертикального ускорения устройства фиксации груза известной массы и измерения вертикального ускорения устройства фиксации груза известной массы с зафиксированным в нем грузом неизвестной массы в процессе подъема при идентичных условиях. 1 ил.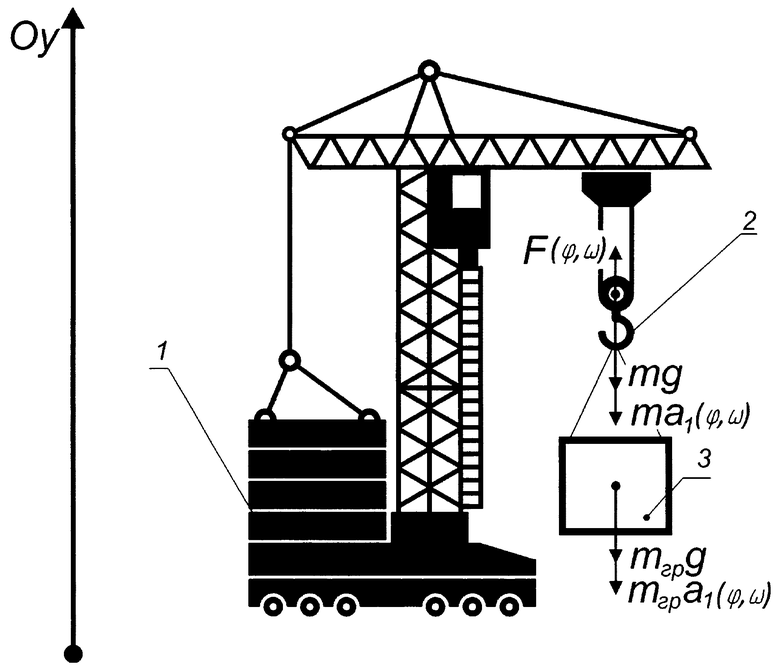
Метод контроля массы груза подъемной машины, заключающийся в том, что масса груза подъемной машины определяется как произведение массы устройства фиксации груза на отношение разности ускорения, сообщаемого устройству фиксации груза при конкретной угловой скорости ротора и конкретном законе изменения амплитуды и частоты питающего приводной электродвигатель подъема напряжения, и ускорения, сообщаемого устройству фиксации груза с жестко зафиксированным на нем грузом при конкретной угловой скорости ротора при том же конкретном законе изменения амплитуды и частоты питающего приводной электродвигатель подъема напряжения, к сумме ускорения, сообщаемого устройству фиксации груза с жестко зафиксированным на нем грузом при конкретной угловой скорости ротора при том же конкретном законе изменения амплитуды и частоты питающего приводной электродвигатель подъема напряжения, и ускорения свободного падения.
| Егоров А.В., Спиридонов А.А., Белоусов К.С., Смикулис Ю.Е., Игнатьев А.В., Степанова К.С | |||
| Динамические методы контроля массы груза, транспортируемого подъёмной машиной // Вестник Поволжского государственного технологического университета | |||
| Сер.: Материалы | |||
| Конструкции | |||
| Технологии | |||
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
| стр | |||
| Пишущая машина | 1922 |
|
SU37A1 |
| RU 2018139179 A, 12.05.2020 | |||
| СИСТЕМА РЕГИСТРАЦИИ МАССЫ ГРУЗА, ВИСЯЩЕГО НА ПОДЪЕМНОМ КАНАТЕ КРАНА | 2010 |
|
RU2537728C2 |

