Изобретение относится к способам определения массы груза, перемещаемого с помощью транспортера.
Известен способ определения массы груза, транспортируемого конвейером, основанный на использовании весоизмерительной роликоопоры и датчика скорости ленты. Транспортируемый со скоростью V груз поступает на весоизмерительную роликоопору и посредством тензопреобразований вычисляется средняя масса груза, проходящего через весоизмерительный ролик в единицу времени. Недостатком такого способа определения массы груза, транспортируемого конвейером, является необходимость организации целого роликоопорного участка взвешивания, а также сложность конструкции и малые частотные характеристики (не более нескольких кГц) весоизмерительной роликоопоры, что ограничивает возможности применения известного способа на высокоскоростных конвейерах (Весы конвейерные ВК. Руководство по эксплуатации АЖЕ 2.794.003 РЭ, прототип).
Изобретение направлено на обеспечение возможности высокоскоростного определения массы груза, транспортируемого конвейером, без применения средств тензометрирования.
Изобретение базируется на установленной закономерности зависимости крутящего момента, а, соответственно, угловых ускорений ротора приводного электродвигателя от нагрузки электродвигателя (L) и угла поворота ротора относительно нулевых точек (ϕ), которые описаны в работе сотрудников национального университета Пусана [Um, D.Y., Park, G.S. Comparison of Electromagnetic Characteristics of Single-Phase Induction Motor between Balanced and Unbalanced Operation under Different Loads. Energies 2021, 14, 919. DOI: 10.3390/en14040919].
Так как в процессе движения ротора приводного электродвигателя его ускорение в течение одного оборота будут меняться пропорционально изменению нагрузки, то, следовательно, будут меняться и линейные ускорения транспортируемого груза.
Сущность изобретения заключается в том, что неизвестная масса груза, транспортируемая конвейером, определяется как произведение известной массы груза, транспортируемой конвейером на отношение разности ускорения, сообщаемого грузу известной массы, транспортируемой конвейером, на конкретной скорости при конкретном законе изменения амплитуды и частоты питающего приводной электродвигатель конвейера напряжения, и, ускорения, сообщаемого грузу неизвестной массы, транспортируемой конвейером, на конкретной скорости при том же конкретном законе изменения амплитуды и частоты питающего приводной электродвигатель конвейера напряжения, к ускорению, сообщаемому грузу неизвестной массы, транспортируемой конвейером, на конкретной скорости при том же конкретном законе изменения амплитуды и частоты питающего приводной электродвигатель конвейера напряжения.
Новизна заключается в том, что измеряется изменение линейного ускорения ленты конвейера при изменении ускорения вала приводного электродвигателя конвейера в течение одного оборота ротора электродвигателя для случаев транспортирования конвейером груза известной массы и груза неизвестной массы.
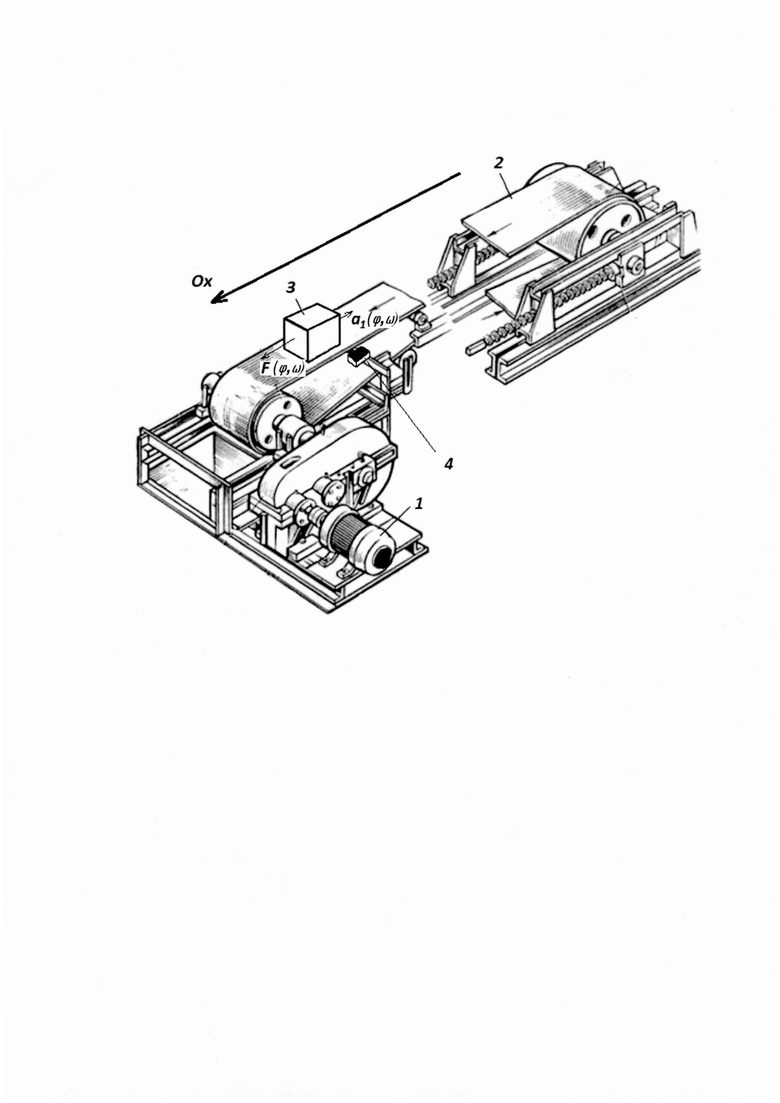
На чертеже изображена схема реализации предлагаемого способа определения массы груза, транспортируемой конвейером.
Конвейер содержит приводной электродвигатель 1, ленту конвейера 2, груз конвейера 3, датчик линейных ускорений ленты конвейера 4.
Реализуется предлагаемый динамический метод контроля массы груза конвейера следующим образом.
На начальном этапе на конвейерной ленте присутствует груз известной массы m. Ленте конвейера при конкретном законе изменения амплитуды и частоты питающего приводной электродвигатель конвейера напряжения при конкретной угловой скорости ротора приводного электродвигателя ω сообщается ускорение а(ϕ, ω) пропорционально ускорению ротора электродвигателя конвейера в зависимости от угла его поворота ϕ.
Затем на ленту конвейера помещается груз неизвестной массы mгр и осуществляется изменение амплитуды и частоты питающего приводной электродвигатель конвейера напряжения по тому же конкретному закону при конкретной угловой скорости ротора приводного электродвигателя ω, при этом ленте конвейера с грузом неизвестной массы сообщается ускорение a1(ϕ, ω) пропорционально ускорению ротора электродвигателя конвейера в зависимости от угла его поворота ϕ.
Силу, прикладываемую к ленте конвейера 2 и груза конвейера 3, со стороны приводного электродвигателя конвейера в зависимости от угла поворота ротора электродвигателя ϕ при конкретной угловой скорости ротора приводного электродвигателя со обозначим через F(ϕ, ω).
Запишем проекции действующих сил на ось Ох для первого и второго этапов:


где m - известная масса груза, размещенная на конвейере;
mгр - неизвестная масса груза, размещенная на конвейере.
Так как закон изменения амплитуды и частоты питающей сети на первом и втором этапе были идентичным, то сила, прикладываемая со стороны приводного электродвигателя в процессе первого и второго этапов одна и та же и равна F(ϕ, ω).
Приравнивая (1) к (2), определяем неизвестную массу mгр:

Технический результат заключается в упрощении способа и повышении скорости измерения массы груза, транспортируемого конвейером, за счет отказа от измерения массы методами тензометрирования и использования измерения изменения линейного ускорения ленты конвейера при изменении ускорения вала приводного электродвигателя конвейера в течение одного оборота ротора электродвигателя для случаев транспортирования конвейером груза известной массы и груза неизвестной массы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИЙ МЕТОД КОНТРОЛЯ МАССЫ ГРУЗА ПОДЪЕМНОЙ МАШИНЫ | 2021 |
|
RU2780976C1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ МАССЫ ГРУЗА, ТРАНСПОРТИРУЕМОГО КОНВЕЙЕРОМ | 2024 |
|
RU2829033C1 |
| ДИНАМИЧЕСКИЙ МЕТОД КОНТРОЛЯ ОБЩЕЙ МАССЫ ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2021 |
|
RU2778700C1 |
| ДИНАМИЧЕСКИЙ МЕТОД КОНТРОЛЯ МАССЫ ГРУЗА КОЛЕСНОЙ МАШИНЫ | 2021 |
|
RU2781899C1 |
| СПОСОБ ГРАДУИРОВКИ И ПОВЕРКИ КОНВЕЙЕРНЫХ ВЕСОВ | 2005 |
|
RU2289798C1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОГО ТРАНСПОРТИРОВАНИЯ | 1999 |
|
RU2149815C1 |
| Конвейерные весы | 1983 |
|
SU1439409A1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА НЕПРЕРЫВНОГО ДОЗИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 2008 |
|
RU2373500C1 |
| Стенд для испытания роликоопор ленточного конвейера | 1983 |
|
SU1135696A1 |
| СИСТЕМА, ОБЕСПЕЧИВАЮЩАЯ ПРОВЕДЕНИЕ ИСПЫТАНИЙ И ПОВЕРКУ УСТРОЙСТВА ИЗМЕРЕНИЯ ВЕСА, СПОСОБ ПРОВЕДЕНИЯ ИСПЫТАНИЯ И ПОВЕРКИ УСТРОЙСТВА ДЛЯ ИЗМЕРЕНИЯ ВЕСА | 2020 |
|
RU2763123C1 |
Изобретение относится к способам определения массы груза, перемещаемого с помощью транспортера, и к весоизмерительной технике. Сущность: неизвестная масса груза, транспортируемая конвейером, определяется как произведение известной массы груза, транспортируемой конвейером, на отношение разности ускорения, сообщаемого грузу известной массы, транспортируемой конвейером, на конкретной скорости при конкретном законе изменения амплитуды и частоты питающего приводной электродвигатель конвейера напряжения, и ускорения, сообщаемого грузу неизвестной массы, транспортируемой конвейером, на конкретной скорости при том же конкретном законе изменения амплитуды и частоты питающего приводной электродвигатель конвейера напряжения, к ускорению, сообщаемому грузу неизвестной массы, транспортируемой конвейером, на конкретной скорости при том же конкретном законе изменения амплитуды и частоты питающего приводной электродвигатель конвейера напряжения. Технический результат: упрощение способа и повышение скорости измерения массы груза, транспортируемого конвейером. 1 ил.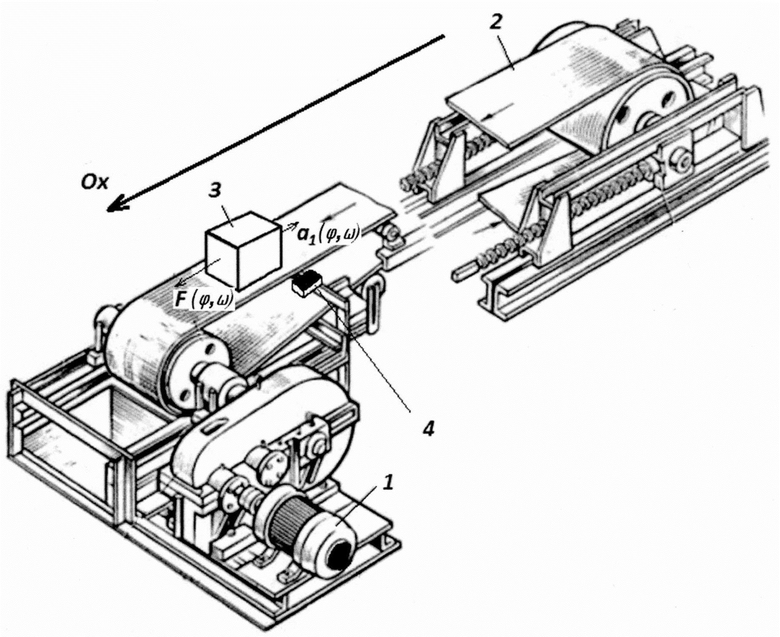
Способ определения неизвестной массы груза, транспортируемой конвейером, заключающийся в том, что неизвестная масса груза, транспортируемая конвейером, определяется как произведение известной массы груза, транспортируемой конвейером, на отношение разности ускорения, сообщаемого грузу известной массы, транспортируемой конвейером, на конкретной скорости при конкретном законе изменения амплитуды и частоты питающего приводной электродвигатель конвейера напряжения, и ускорения, сообщаемого грузу неизвестной массы, транспортируемой конвейером, на конкретной скорости при том же конкретном законе изменения амплитуды и частоты питающего приводной электродвигатель конвейера напряжения, к ускорению, сообщаемому грузу неизвестной массы, транспортируемой конвейером, на конкретной скорости при том же конкретном законе изменения амплитуды и частоты питающего приводной электродвигатель конвейера напряжения.
| Динамические методы контроля механических параметров ленточных конвейеров / А | |||
| В | |||
| Егоров, А | |||
| А | |||
| Спиридонов, С | |||
| В | |||
| Клейменов, Ю | |||
| Е | |||
| Смикулис, А | |||
| В | |||
| Игнатьев, К | |||
| С | |||
| Степанова // Вестник Поволжского государственного технологического университета | |||
| Сер.: Материалы | |||
| Конструкции | |||
| Технологии | |||
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
| стр | |||
| Клапанный регулятор для паровозов | 1919 |
|
SU103A1 |
| Устройство для определения веса груза,транспортируемого конвейером | 1986 |
|
SU1447732A1 |
| Весовое устройство | 1990 |
|
SU1779947A1 |

