Изобретение относится к весоизмерительной технике и может быть использовано для определения веса колесной машины.
Известен способ определения массы груза, перевозимого колесным транспортным средством, который заключается в том, что на ровном горизонтальном участке дороги, исключающем пробуксовывание ведущих колес, при включенной конкретной передаче коробки перемены передач проводятся два замера угловых ускорений коленчатого вала двигателя колесного транспортного средства при полностью выжатом акселераторе при свободном разгоне без эталонного груза и с эталонным грузом и определение характеристики крутящего момента, затем проводятся два замера угловых ускорений коленчатого вала двигателя колесного транспортного средства при полностью выжатом акселераторе при свободном разгоне без груза и с грузом, а масса груза, перевозимого колесным транспортным средством, определяется как отношение произведения характеристики крутящего момента на квадрат передаточного отношения коробки перемены передач на квадрат передаточного отношения главной передачи на квадрат передаточного отношения бортового редуктора на разность углового ускорения коленчатого вала двигателя при полностью выжатом акселераторе при свободном разгоне без груза и углового ускорения коленчатого вала двигателя при полностью выжатом акселераторе при свободном разгоне с грузом к произведению квадрата радиуса колеса с учетом деформации шины на угловое ускорение коленчатого вала двигателя при полностью выжатом акселераторе при свободном разгоне без груза на угловое ускорение коленчатого вала двигателя при полностью выжатом акселераторе при свободном разгоне с грузом (Патент РФ №2451267 C1, дата приоритета 11.01.2011, дата опубл. 20.05.2012, авторы: Егоров А.В. и др., RU).
Недостатком аналога является необходимость проведения многократных измерений для осуществления сложных расчетов при реализации известного способа для достижения высокой точности.
В качестве прототипа принят известный способ измерения веса груза и контроля загрузки транспортного средства и бортовая измерительная система для его осуществления. Согласно способу, измеряют вертикальные нагрузки, действующие на подвеску колес, в качестве которой используют рессоры, снабженные датчиками углового положения, каждый из которых устанавливают на отдельной рессоре так, что одна из трех взаимно перпендикулярных его осей лежит в плоскости местного горизонта, совпадает с продольной осью симметрии рессоры и направлена в направлении движения транспортного средства, вторая лежит в плоскости местного горизонта, а третья перпендикулярна плоскости местного горизонта и направлена к центру Земли, далее передают данные измерения от датчиков в вычислительное устройство взвешивания и определяют вес груза и загрузку транспортного средства с учетом углов отклонения участков рессоры (Патент РФ №2445586 С1, дата приоритета 25.11.2010, дата опубл. 20.03.2012, авторы: Солдатенков В.А. и др., RU, прототип).
Недостаток прототипа заключается в необходимости снабжения колесного транспортного средства дополнительными элементами измерительного устройства.
Технической проблемой является создание динамического метода контроля массы груза колесной машины, который позволит осуществлять оперативный контроль непосредственно во время движения колесной машины по дорогам общего пользования.
Для решения технической проблемы предложен динамический метод контроля массы груза колесной машины, характеризующийся тем, что масса груза колесной машины определяется как произведение массы колесной машины на отношение разности ускорения колесной машины, изменение положения органов управления работой двигателя которой осуществляется по определенному закону, разгоняющейся на конкретной передаче на горизонтальном участке без пробуксовки и конкретном пятне контакта каждого из колес и известной розе и скорости ветра и ускорения колесной машины, изменение положения органов управления работой двигателя которой осуществляется по тому же определенному закону, разгоняющейся на конкретной передаче на горизонтальном участке без пробуксовки и конкретном пятне контакта каждого из колес и известной розе и скорости ветра с грузом, к ускорению колесной машины, изменение положения органов управления работой двигателя которой осуществляется по тому же определенному закону, разгоняющейся на конкретной передаче на горизонтальном участке без пробуксовки и конкретном пятне контакта каждого из колес и известной розе и скорости ветра с грузом.
Новизна изобретения состоит в том, что измеряя ускорения колесной машины, изменение положения органов управления работой двигателя которой осуществляется по определенному закону, при движении на конкретной передаче с известной загруженной массой без пробуксовки при известном пятне контакта колес, известной розе и скорости ветра на горизонтальном участке дороги и ускорения колесной машины, изменение положения органов управления работой двигателя которой осуществляется по тому же определенному закону, при движении на конкретной передаче с неизвестной загруженной массой без пробуксовки при известном пятне контакта колес, известной розе и скорости ветра на горизонтальном участке дороги, зная начальную массы колесной машины, определяют массу груза, перевозимого колесной машиной.
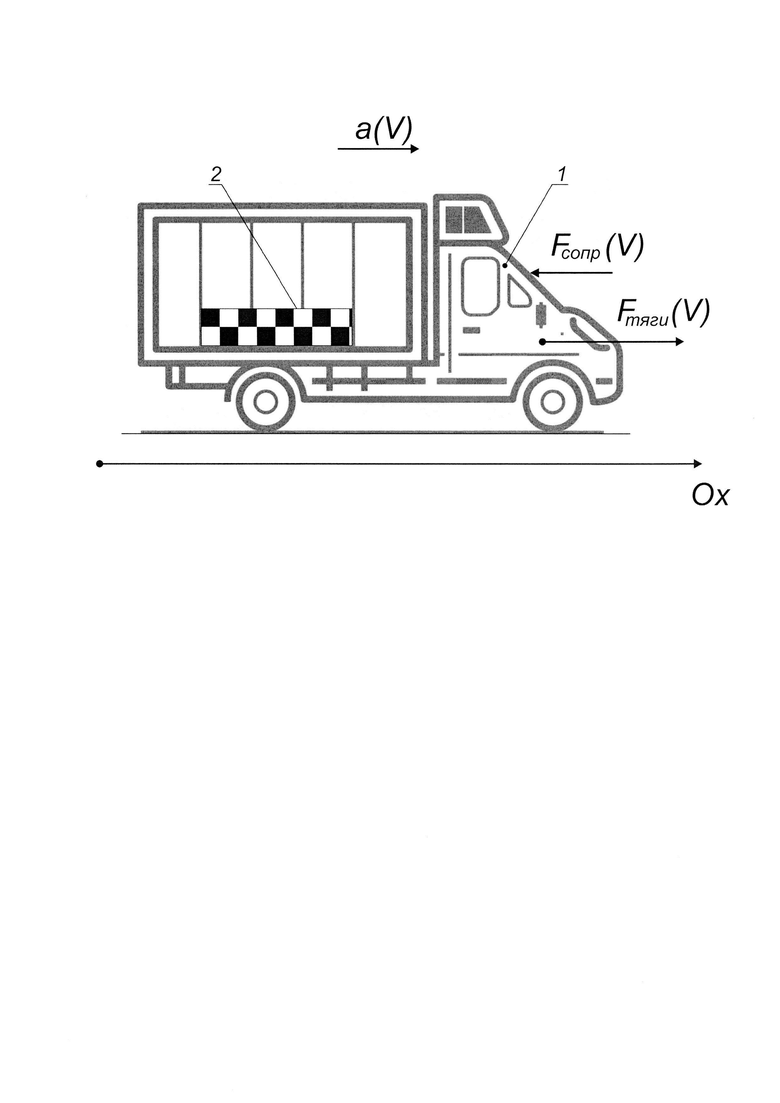
На чертеже изображена схема реализации предлагаемого динамического метода контроля массы груза колесной машины.
Колесная машина 1 содержит груз неизвестной массы 2.
Реализуется предлагаемый динамический метод контроля массы груза колесной машины следующим образом.
На начальном этапе колесная машина 1, изменение положения органов управления работой двигателя которой осуществляется по определенному закону, разгоняется на конкретной передаче на горизонтальном участке без пробуксовки с известным пятном контакта колес и известной розе и скорости ветра, при этом общий вес колесной машины составляет m, а ускорение колесной машины при скорости V составляет a(V),
Затем на колесную машину 1 помещается груз неизвестной массы 2 и колесная машина 1, изменение положения органов управления работой двигателя которой осуществляется по тому же определенному закону, разгоняется на конкретной передаче в нагруженном состоянии на горизонтальном участке без пробуксовки при том же известном пятне контакта каждого из колес и известной розе и скорости ветра, при этом масса груза составляет mгр, а ускорение колесной машины с грузом при скорости V составляет a1(V).
Тягу, развиваемую ведущими колесами колесной машины при скорости V, обозначим через Fтяги(V), сумму лобового сопротивления и сопротивления качению со стороны колес колесной машины при скорости V обозначим через Fсопр(V).
Запишем проекции на ось Ох действующих на колесную машину сил во время первого и второго разгона при скорости V:


Так как первое и второе ускорение колесной машины осуществлялось по одному и тому же определенному закону изменения положения органов управления работой двигателя на одной конкретной передаче на горизонтальном участке без пробуксовки и том же пятне контакта каждого из колес и известной розе и скорости ветра, то, соответственно, тяга ведущих колес развивалась каждый раз одна и та же.
Приравнивая (1) к (2), определяем неизвестную массу mгр.

Технический результат заключается в том, что предлагаемый динамический метод контроля массы груза колесной машины позволит осуществлять оперативный контроль непосредственно во время движения колесной машины по дорогам общего пользования при реализации идентичных ускорений в идентичных условиях.
Алгоритм реализации метода может быть интегрирован в систему управления работой колесной машины с автоматической подкачкой колес и при реализации не потребует создания специализированной аппаратной части.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КРУТЯЩЕГО МОМЕНТА ДВИГАТЕЛЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2438107C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ ГРУЗА, ПЕРЕВОЗИМОГО КОЛЕСНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2011 |
|
RU2451267C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КРУТЯЩЕГО МОМЕНТА ДВИГАТЕЛЯ ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2441210C1 |
| СИСТЕМА КОНТРОЛЯ ТЯГИ | 2017 |
|
RU2688081C1 |
| СПОСОБ ВЫБОРА ПЕРЕДАЧИ ВО ВРЕМЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ В ТЯЖЕЛЫХ УСЛОВИЯХ ДВИЖЕНИЯ В ГОРУ | 2005 |
|
RU2426927C2 |
| Аэродромная установка рекуперации энергии самолета при посадке для разгона самолета на взлете | 2018 |
|
RU2668768C1 |
| ДИНАМИЧЕСКИЙ МЕТОД КОНТРОЛЯ ОБЩЕЙ МАССЫ ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2021 |
|
RU2778700C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ТРАНСПОРТНОГО СРЕДСТВА, СПОСОБ ДЛЯ ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2580366C2 |
| ЖЕЛЕЗНОДОРОЖНЫЙ АЭРОДРОМНЫЙ КОМПЛЕКС ВЗЛЕТА-ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2356801C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕИЗВЕСТНОЙ МАССЫ ГРУЗА, ТРАНСПОРТИРУЕМОЙ КОНВЕЙЕРОМ | 2021 |
|
RU2780981C1 |
Изобретение относится к динамическому методу контроля массы груза колесной машины. Алгоритм интегрирован в систему управления работой колесной машины с автоматической подкачкой колес. Изменение положения органов управления работой двигателя осуществляют по определенному закону. Разгоняют на конкретной передаче в не нагруженном состоянии на горизонтальном участке без пробуксовки с известным пятном контакта колес при известной розе и скорости ветра. Общий вес колесной машины составляет m, а ускорение колесной машины при скорости V составляет a(V). Разгоняют на конкретной передаче в нагруженном состоянии на горизонтальном участке без пробуксовки при том же известном пятне контакта каждого из колес и известной розе и скорости ветра. Масса груза составляет mгр, а ускорение колесной машины с грузом при скорости V составляет a1(V). Тяга, развиваемая ведущими колесами колесной машины при скорости V, составляет Fтяги(V), а сумма лобового сопротивления и сопротивления качению со стороны колес колесной машины при скорости V составляет Fсопр(V). Достигается оперативный контроль массы груза во время движения колесной машины по дорогам общего пользования при реализации идентичных ускорений в идентичных условиях. 1 ил.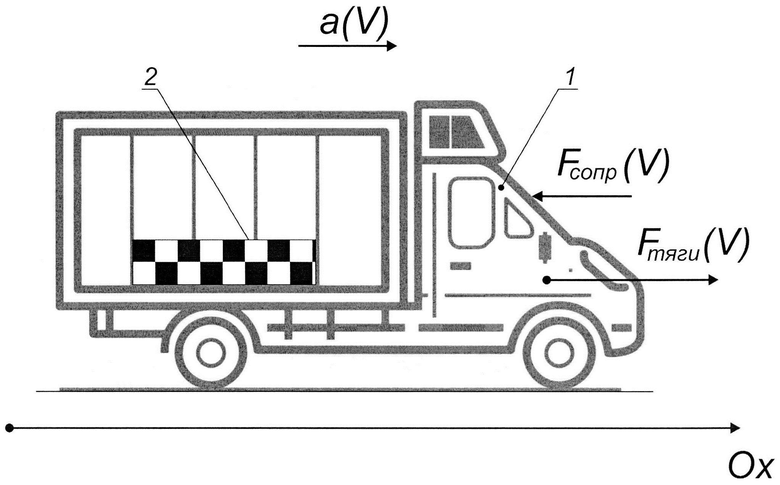
Динамический метод контроля массы груза колесной машины, алгоритм которого интегрирован в систему управления работой колесной машины с автоматической подкачкой колес, характеризующийся тем, что колесную машину, изменение положения органов управления работой двигателя которой осуществляют по определенному закону, разгоняют на конкретной передаче на горизонтальном участке без пробуксовки с известным пятном контакта колес и известной розе и скорости ветра, при этом общий вес колесной машины составляет m, а ускорение колесной машины при скорости V составляет a(V); затем на колесную машину помещают груз неизвестной массы и колесную машину, изменение положения органов управления работой двигателя которой осуществляют по тому же определенному закону, разгоняют на конкретной передаче в нагруженном состоянии на горизонтальном участке без пробуксовки при том же известном пятне контакта каждого из колес и известной розе и скорости ветра, при этом масса груза составляет mгр, а ускорение колесной машины с грузом при скорости V составляет a1(V); тяга, развиваемая ведущими колесами колесной машины при скорости V, составляет Fтяги(V), а сумма лобового сопротивления и сопротивления качению со стороны колес колесной машины при скорости V составляет Fсопр(V), таким образом проекции на ось Ох действующих на колесную машину сил во время первого и второго разгона при скорости V равны:

приравнивают (1) к (2), определяют массу груза mгр

| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ ГРУЗА, ПЕРЕВОЗИМОГО КОЛЕСНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2011 |
|
RU2451267C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕСА ГРУЗА И КОНТРОЛЯ ЗАГРУЗКИ ТРАНСПОРТНОГО СРЕДСТВА И БОРТОВАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445586C1 |
| Вакуум-аппарат непрерывного действия для уваривания сахарных утфелей | 1960 |
|
SU134638A1 |
| RU 2012106917 A, 10.09.2013. | |||

