Изобретение относится к области систем управления беспилотных летательных аппаратов, а именно распределению группы летательных аппаратов между группой целей, и может быть использовано в комплексе функциональных программ управления и наведения беспилотных летательных аппаратов при их групповом применении для автоматической согласованной выработки решений по идентификации объектов в неоднородной группе целей и выполнения оптимального целераспределения с учетом потерь в группе беспилотных летательных аппаратов, а также расстояний между беспилотными летательными аппаратами и целями.
Из уровня техники известен способ автоматического группового целераспределения истребителей с учетом возможного выбывания участников по патенту РФ №2684963 (приоритет от 22.12.2017, МПК В64С 19/00), выбранный в качестве аналога. Способ автоматического группового целераспределения истребителей с учетом возможного выбывания участников заключается в том, что для каждого перехватчика формулируют функционал эффективности перехвата, путем решения множества численных уравнений получают оптимальное назначение целей перехватчикам вместе с траекториями перехвата, формируют сигналы управления перехватчиками, обеспечивающие их наведение на выбранные цели, при этом обеспечивают возможность перераспределения целей при выбывании участников.
Способ автоматического группового целераспределения истребителей с учетом возможного выбывания участников обладает следующим недостатком: отсутствие возможности определения и учета приоритета целей в процессе целераспределения.
Также из уровня техники известен способ автоматического группового целераспределения истребителей с учетом приоритета целей по патенту РФ №2690234 (приоритет от 12.07.2018, МПК F41G 7/22), наиболее близкий к предлагаемому изобретению и выбранный в качестве прототипа. Способ автоматического группового целераспределения истребителей с учетом приоритета целей состоит в том, что определяют функционал эффективности перехвата для каждой пары «перехватчик-цель», учитывая как временные, так и энергетические затраты на перехват, выбирают среди определенного класса траекторий ту, которая обеспечивает минимум указанного функционала при выполнении ограничений на максимальную скорость и ускорение перехватчика, из полученных минимальных значений функционала составляют матрицу перехвата, для важных целей определяют вероятность перехвата целей одним перехватчиком и задают требуемые вероятности перехвата, определяют требуемое количество перехватчиков для каждой из важных целей, ищут распределение целей по перехватчикам, которое минимизирует суммарный функционал качества и обеспечивает требуемую вероятность перехвата каждой цели.
Недостатком способа автоматического группового целераспределения истребителей с учетом приоритета целей является то, что при осуществлении способа автоматического группового целераспределения истребителей с учетом приоритета целей задают важность целей заранее и не подвергают анализу в процессе целераспределения, при этом не учитывают, что важных целей в произвольной группе целей может быть произвольное количество, и не учитывают возможность информационного противодействия, что снижает эффективность целераспределения беспилотных летательных аппаратов по важным целям.
Изобретение направлено на решение следующей технической проблемы: создание способа автоматического группового целераспределения беспилотных летательных аппаратов, позволяющего повысить вероятность выявления главной цели в группе целей и оптимизировать распределение беспилотных летательных аппаратов между главной целью и второстепенными целями с учетом информационного противодействия.
Для способа автоматического группового целераспределения беспилотных летательных аппаратов техническая проблема решается за счет того, что производят целераспределение группы однородных беспилотных летательных аппаратов по группе неоднородных целей, в состав которой входит, по меньшей мере, одна главная цель, а также неопределенное количество второстепенных целей и ложных целей, сканируют область вероятного положения целей с помощью модулей наведения, входящих в состав каждого беспилотного летательного аппарата, производят обмен информацией об обнаруженных целях с помощью модулей обмена информацией, входящих в состав каждого беспилотного летательного аппарата, передают указанную информацию на модули анализа информации, входящие в состав каждого беспилотного летательного аппарата, с помощью модулей анализа информации формируют матрицу обнаружения целей Аобн размерностью NУСП×NНК, где NУСП количество беспилотных летательных аппаратов, NНК - количество обнаруженных целей, состоящую из дискретного множества значений (0 - не обнаружено; 1 - главная цель; 2 - второстепенная цель; 3 - ложная цель), производят расчет надежности идентификации с помощью модуля анализа информации, для чего формируют матрицу количества обнаружения объектов группы целей по типу цели среди всех беспилотных летательных аппаратов:  где Nтип - количество типов объектов, имеющихся в конфигурации целей; Nтип=3, NНК - количество объектов группы целей, nijобн - количество обнаружений каждой из целей в виде объекта соответствующего типа, формируют матрицу частоты обнаружения объектов группы целей по типу цели:
где Nтип - количество типов объектов, имеющихся в конфигурации целей; Nтип=3, NНК - количество объектов группы целей, nijобн - количество обнаружений каждой из целей в виде объекта соответствующего типа, формируют матрицу частоты обнаружения объектов группы целей по типу цели:
вычитают из частоты обнаружения главной цели частоту определения ложных целей:

при Pj обн<0 принимается pjобн=0, определяют pmax - максимальный элемент матрицы pобн и его номер nmax: pmax=max(pобн); nmax=arg(max(pобн)), при pmax>Робн тип 1 объект группы целей считают идентифицированным как главная цель и в исследовании принимают значение Робн тип 1=0,1, если же pmax<Pобн тип 1, то принимают решение, что главная цель не идентифицирована, производят модификацию матрицы Робн следующим образом, получая матрицу  :
:

если главная цель с номером nmax выделена, то для нее элемент матрицы для типа 1 принимается равным 1, а остальные типы приравниваются нулю, а для всех остальных объектов группы целей, для которых имеют место ненулевые частоты идентификации, элементы матрицы  для типа 3 складываются с элементами для типа 1, т.е. главная цель признается ложной, если в составе группы целей имеются несколько главных целей, то в этом случае с помощью модулей анализа информации 23-25 повторяют процедуру нахождения в векторе робн следующего максимального элемента, но уже с ограничением Pобн тип 1=0,5: если есть две цели с
для типа 3 складываются с элементами для типа 1, т.е. главная цель признается ложной, если в составе группы целей имеются несколько главных целей, то в этом случае с помощью модулей анализа информации 23-25 повторяют процедуру нахождения в векторе робн следующего максимального элемента, но уже с ограничением Pобн тип 1=0,5: если есть две цели с  то они обе принимаются как главные цели, присваивают идентификационные типы объектов путем модификации матрицы Аобн и получения матрицы
то они обе принимаются как главные цели, присваивают идентификационные типы объектов путем модификации матрицы Аобн и получения матрицы  :
:


для каждого объекта группы целей в матрице определяют частоту больше 0,5, и для нее соответствующий индекс считают идентифицированным типом, который проставляется по всем объектам подгруппы БЛА, осуществляют построение матрицы эффективности, для чего рассчитывают расстояния между всеми парами объектов систем; параметр - матрица R размерностью NУСП × NНК:

обнуляют элементы матрицы R, для которых не было обнаружения: если aij обн=0, то rij=0, на основе вектора номеров распределения Nраспред создают матрицу RЦР, размерностью NУСП × NУСП; принимают счетчик объектов группы целей j=0, если элемент  то rЦРij=rik,
то rЦРij=rik, 
 и параметр j увеличивают на 1, создают вектор номеров объектов целей, по которым будет произведено целераспределение: NЦР, с элементами nЦР j=k,
и параметр j увеличивают на 1, создают вектор номеров объектов целей, по которым будет произведено целераспределение: NЦР, с элементами nЦР j=k,  нормируют матрицу RЦР: формируют матрицу
нормируют матрицу RЦР: формируют матрицу  с элементами
с элементами

приводят матрицу  к требованиям алгоритма целераспределения по максимизации критерия:
к требованиям алгоритма целераспределения по максимизации критерия:

вводят второй критерий: минимизация суммарной угловой дальности, которая представляет собой модуль разницы координат по ординате (параметр у), матрицу Н значений данного критерия при этом формируют следующим образом:

для матрицы Н проводят обнуление соответствующих элементов согласно матрице обнаружения Аобн, нормируют и приводят ее к варианту максимизации, с формированием итоговой матрицы  матрицу эффективности формируют как свертку двух критериев с весовым коэффициентом их значимости α∈[0; 1]:
матрицу эффективности формируют как свертку двух критериев с весовым коэффициентом их значимости α∈[0; 1]:

формируют матрицу стоимостей/эффективностей Р={pij}, размерностью n0×n0, где n0 - число подлежащих распределению объектов на текущий момент, вычисляют значения суммы элементов матрицы стоимостей по строкам:
выбирают объект группы беспилотных летательных аппаратов, обладающий наихудшими характеристиками:
выбирают объект группы целей, обладающий наилучшей эффективностью при воздействии на него выбранного беспилотного летательного аппарата - назначают imin на объект jmax:
проводят назначение - записывают в матрицу ZR:
вычеркивают строку с номером imin и столбец с номером jmax из общей матрицы Р, для элемента которой проведено назначение:

уменьшают индекс размерности матрицы Р: k=k-1, проверяют условие k=0, если условие выполняется, то производят вывод матрицы распределения беспилотных летательных аппаратов ZR - результата целераспределения, передают результат целераспределения в модуль обмена информацией беспилотного летательного аппарата, с помощью модулей обмена информацией передают результат целераспределения всем беспилотным летательным аппаратам, и с помощью модулей наведения каждого беспилотного летательного аппарата на основе результата целераспределения осуществляют выбор необходимой цели для наведения по соответствующим координатам.
Изобретение позволяет достичь следующего технического результата: повышение вероятности выявления главной цели и оптимизация распределения беспилотных летательных аппаратов между главной целью и второстепенными целями, а также устойчивость к информационному противодействию за счет согласованного и децентрализованного между отдельными беспилотными летательными аппаратами распределения целей.
Из уровня техники известно устройство для группового целераспределения истребителей с учетом возможного выбывания участников по патенту РФ №2684963 (приоритет от 22.12.2017, МПК В64С 19/00), выбранное в качестве аналога. Устройство для группового целераспределения истребителей с учетом возможного выбывания участников содержит средство наведения, средство обработки данных и средство передачи сигналов управления перехватчиками, и позволяет формулировать функционал эффективности перехвата для каждого перехватчика, получать оптимальное назначение целей перехватчикам вместе с траекториями перехвата путем решения множества численных уравнений, формировать сигналы управления перехватчиками, обеспечивающие их наведение на выбранные цели, при этом обеспечить возможность перераспределения целей при выбывании участников.
Устройство для группового целераспределения истребителей с учетом возможного выбывания участников обладает следующим недостатком: отсутствие возможности определения и учета приоритета целей в процессе целераспределения.
Также из уровня техники известно устройство для автоматического группового целераспределения истребителей с учетом приоритета целей по патенту РФ №2690234 (приоритет от 12.07.2018, МПК F41G7/22), наиболее близкое к предлагаемому изобретению и выбранное в качестве прототипа. Устройство для автоматического группового целераспределения истребителей с учетом приоритета целей содержит средство наведения, средство обработки данных и средство передачи сигналов управления перехватчиками и позволяет.
Недостатком устройства для автоматического группового целераспределения истребителей с учетом приоритета целей является то, что устройство для автоматического группового целераспределения истребителей с учетом приоритета целей позволяет задать важность целей заранее и не позволяет анализировать важность целей в процессе целераспределения, при этом не позволяет учитывать, что важных целей в произвольной группе целей может быть произвольное количество, и не позволяет учитывать возможность информационного противодействия, что снижает эффективность целераспределения беспилотных летательных аппаратов по важным целям.
Изобретение направлено на решение следующей технической проблемы: создание системы для автоматического группового целераспределения беспилотных летательных аппаратов, позволяющей осуществлять оптимальное целераспределение беспилотных летательных аппаратов с повышенной вероятностью выявления главной цели в группе целей с учетом информационного противодействия.
Техническая проблема решается за счет того, что система для автоматического группового целераспределения беспилотных летательных аппаратов состоит, по меньшей мере, из двух устройств распределения целей, каждое из которых установлено на отдельном беспилотном летательном аппарате, в состав каждого устройства распределения целей входят модуль наведения, модуль анализа информации, модуль обмена информацией, при этом первый выход модуля наведения соединен с первым входом модуля обмена информацией, первый вход модуля наведения соединен с первым выходом модуля анализа информации, второй выход модуля наведения соединен с первым входом модуля анализа информации, второй вход модуля обмена информацией соединен со вторым выходом модуля анализа информации, первый выход модуля обмена информацией соединен со вторым входом модуля анализа информации, при этом каждый модуль обмена информации каждого устройства распределения целей выполнен с возможностью обмена данными с другими модулями обмена информацией в составе системы распределения целей.
Изобретение позволяет достичь следующего технического результата: повышение вероятности выявления главной цели и оптимизация распределения беспилотных летательных аппаратов между главной целью и второстепенными целями, а также устойчивость к информационному противодействию за счет согласованного и децентрализованного между отдельными беспилотными летательными аппаратами распределения целей.
Сущность предлагаемого изобретения поясняется чертежами:
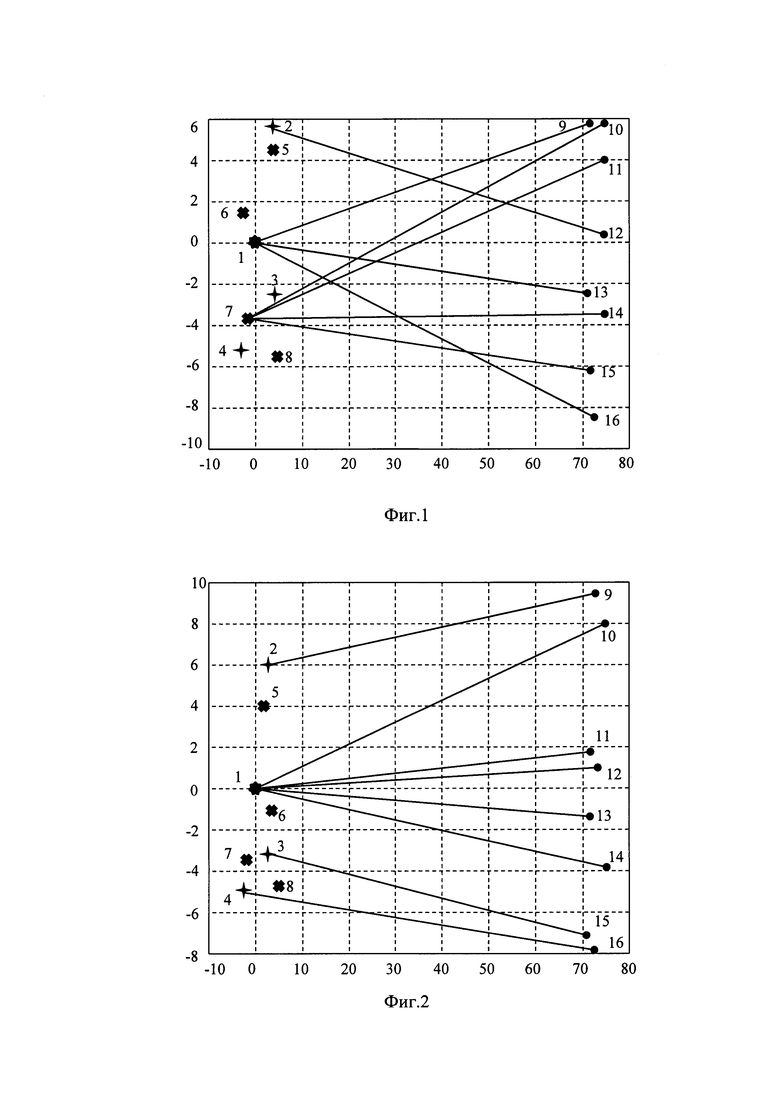
На фиг. 1 изображены результаты целераспределения при автономной работе беспилотных летательных аппаратов на примере восьми целей (включая ложные цели) и восьми беспилотных летательных аппаратов.
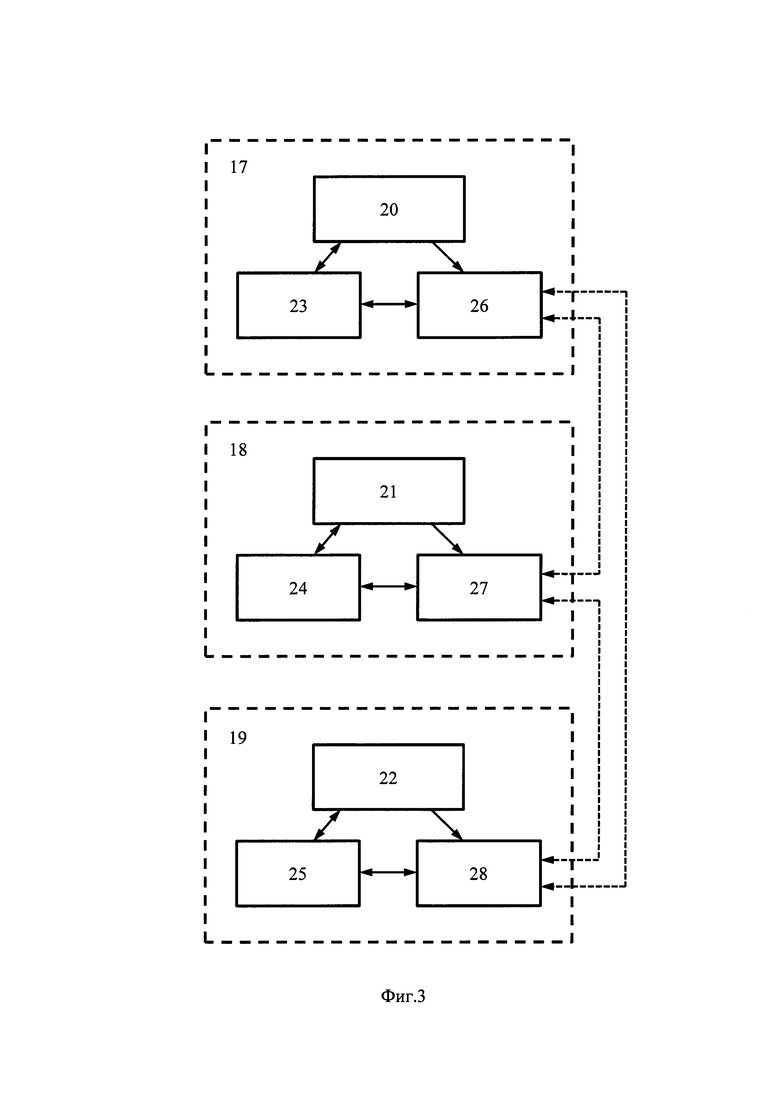
На фиг. 2 изображены результаты целераспределения при информационном взаимодействии беспилотных летательных аппаратов с использованием способа автоматического группового целераспределения беспилотных летательных аппаратов на примере восьми целей (включая ложные цели) и восьми беспилотных летательных аппаратов.
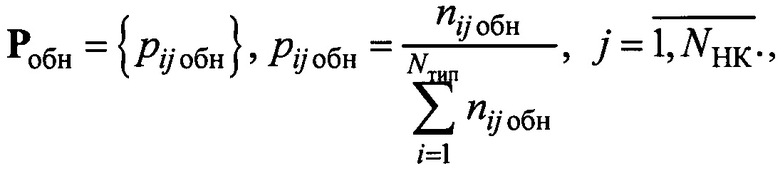
На фиг. 3 изображена схема системы для автоматического группового целераспределения беспилотных летательных аппаратов для трех беспилотных летательных аппаратов.
На фиг. 1-3 обозначены следующие позиции:
1 - главная цель;
2 - первая второстепенная цель;
3 - вторая второстепенная цель;
4 - третья второстепенная цель;
5 - первая ложная цель;
6 - вторая ложная цель;
7 - третья ложная цель;
8 - четвертая ложная цель;
9 - первый беспилотный летательный аппарат;
10 - второй беспилотный летательный аппарат;
11 - третий беспилотный летательный аппарат;
12 - четвертый беспилотный летательный аппарат;
13 - пятый беспилотный летательный аппарат;
14 - шестой беспилотный летательный аппарат;
15 - седьмой беспилотный летательный аппарат;
16 - восьмой беспилотный летательный аппарат;
17 - первое устройство распределения целей;
18 - второе устройство распределения целей;
19 - третье устройство распределения целей;
20 - первый модуль наведения;
21 - второй модуль наведения;
22 - третий модуль наведения;
23 - первый модуль анализа информации;
24 - второй модуль анализа информации;
25 - третий модуль анализа информации;
26 - первый модуль обмена информации;
27 - второй модуль обмена информации;
28 - третий модуль обмена информации.
Способ автоматического группового целераспределения беспилотных летательных аппаратов предназначен для целераспределения группы однородных беспилотных летательных аппаратов по группе неоднородных целей и проиллюстрирован на фиг. 2 на примере случая для одной главной цели 1, трех второстепенных целей 2-4, четырех ложных целей 5-8 и восьми беспилотных летательных аппаратов 9-16, однако количество и состав целей 1-8 и количество беспилотных летательных аппаратов 9-16 могут быть различными. Для функционирования способа автоматического группового целераспределения беспилотных летательных аппаратов необходимо не менее двух беспилотных летательных аппаратов (в общем случае их количество равно NУСП). В состав каждого беспилотного летательного аппарата 9-16 входит устройство распределения целей 17-19 (на фиг. 3 изображены устройства распределения целей 17-19 для первых трех из беспилотных летательных аппаратов 9-16), каждое из которых содержит модуль наведения 20-22, который может быть выполнен в виде головки самонаведения беспилотного летательного аппарата, модуль анализа информации 23-25, который может быть выполнен в виде бортовой цифровой вычислительной машины в составе головки самонаведения, и модуль обмена информацией 26-28, который может быть выполнен в виде радиосвязного оборудования беспилотного летательного аппарата.
Способ автоматического группового целераспределения беспилотных летательных аппаратов заключается в следующем:
Производят целераспределение группы однородных беспилотных летательных аппаратов 9-16 по группе неоднородных целей 1-8, в состав которой входит, по меньшей мере, одна главная цель 1, а также неопределенное количество второстепенных целей 2-4 и ложных целей 5-8. Сканируют область вероятного положения целей 1-8 с помощью модулей наведения 20-22, входящих в состав каждого беспилотного летательного аппарата 9-16, производят обмен информацией об обнаруженных целях 1-8 с помощью модулей обмена информацией 26-28, входящих в состав каждого беспилотного летательного аппарата 9-16, а также передают указанную информацию на модули анализа информации 23-25, входящие в состав каждого беспилотного летательного аппарата 9-16. Данные, которые передают между беспилотными летательными аппаратами 9-16 при помощи модулей обмена информацией 26-28: координаты обнаруженных целей 1-8 и вектор их типов.
С помощью модулей анализа информации 23-25, получив информацию об обнаруженных целях 1-8 от модулей наведения 20-22 и модулей обмена информацией 26-28, формируют матрицу обнаружения целей Аобн размерностью NУСП×NНК, где NУСП - количество беспилотных летательных аппаратов (9-16), NНК - количество обнаруженных целей (1-8), состоящую из дискретного множества значений (0 - не обнаружено; 1 - главная цель 1; 2 - второстепенная цель 2-4; 3 - ложная цель 5-8).
Производят расчет надежности идентификации с помощью модуля анализа информации 23-25.
Для формирования параметра надежности идентификации главной цели в группе целей 1-8 необходимо выполнить следующие действия с помощью модулей анализа информации 23-25:
Формируют матрицу количества обнаружения объектов группы целей по типу цели среди всех беспилотных летательных аппаратов:

где Nтип - количество типов объектов, имеющихся в конфигурации целей; Nтип=3, NНК - количество объектов группы целей, nijобн - количество обнаружений каждой из целей в виде объекта соответствующего типа.
Формируют матрицу частоты обнаружения объектов группы целей по типу цели:
Вычитают из частоты обнаружения главной цели частоту определения ложных целей:

При pj обн<0 принимается pjобн=0.
Определяют pmax - максимальный элемент матрицы робн и его номер

При pmax>Pобн тип 1 объект группы целей считают идентифицированным как главная цель. В исследовании принимают значение Pобн тип 1=0,1. Если же pmax<Pобн тип 1, то принимают решение, что главная цель не идентифицирована: слишком много помех, связанных с наличием ложных целей.
Производят модификацию матрицы Робн следующим образом, получая матрицу 

Таким образом, если главная цель с номером nmax выделена, то для нее элемент матрицы  для типа 1 принимается равным 1, а остальные типы приравниваются нулю, а для всех остальных объектов группы целей, для которых имеют место ненулевые частоты идентификации, элементы матрицы
для типа 1 принимается равным 1, а остальные типы приравниваются нулю, а для всех остальных объектов группы целей, для которых имеют место ненулевые частоты идентификации, элементы матрицы  для типа 3 складываются с элементами для типа 1, т.е. главная цель признается ложной.
для типа 3 складываются с элементами для типа 1, т.е. главная цель признается ложной.
Если в составе группы целей 1-8 имеются несколько главных целей 1, то в этом случае с помощью модулей анализа информации 23-25 повторяют процедуру нахождения в векторе робн следующего максимального элемента, но уже с ограничением Pобн тип 1=0,5: если есть две цели с  то они обе принимаются как главные цели для беспилотных летательных аппаратов 9-16. В этом случае возможен вариант, когда ложная цель будет идентифицирована как вторая главная цель, поэтому для алгоритма идентификации модулей анализа информации 23-25 необходимо заранее поставить дополнительное условие возможности наличия второй главной цели. Распределение между главными целями проводят равномерно.
то они обе принимаются как главные цели для беспилотных летательных аппаратов 9-16. В этом случае возможен вариант, когда ложная цель будет идентифицирована как вторая главная цель, поэтому для алгоритма идентификации модулей анализа информации 23-25 необходимо заранее поставить дополнительное условие возможности наличия второй главной цели. Распределение между главными целями проводят равномерно.
Присваивают идентификационные типы объектов путем модификации матрицы Аобн и получения матрицы 

Таким образом, для каждого объекта группы целей в матрице  определяют частоту больше 0,5, и для нее соответствующий индекс считают идентифицированным типом, который проставляется по всем объектам подгруппы БЛА. При наличии равных вероятностей для какого-либо объекта целей в качестве типа данной цели принимается более высокий (т.е. в базовом алгоритме для целей из типов 2 и 3 выбирается тип 2).
определяют частоту больше 0,5, и для нее соответствующий индекс считают идентифицированным типом, который проставляется по всем объектам подгруппы БЛА. При наличии равных вероятностей для какого-либо объекта целей в качестве типа данной цели принимается более высокий (т.е. в базовом алгоритме для целей из типов 2 и 3 выбирается тип 2).
Формируют целераспределение группы беспилотных летательных аппаратов по объектам группы целей с помощью модулей анализа информации 23-25 на основе минимизации суммарного расстояния между объектами группы целей при формировании матрицы назначения. В качестве базового метода целераспределения используют модифицированный метод минимального элемента. Так как используют критерий минимума расстояния, то для корректной работы алгоритма целераспределения, максимизирующего эффективность, необходимо не только нормировать матрицу, но и инвертировать ее ненулевые элементы в интервале [0; 1].
Целераспределение производят в два этапа. На первом этапе осуществляют построение матрицы эффективности, на втором этапе применяют алгоритм модифицированного метода минимального элемента.
Осуществляют построение матрицы эффективности, для чего рассчитывают расстояния между всеми парами объектов систем; параметр - матрица R размерностью NУСП × NНК:

Обнуляют элементы матрицы R, для которых не было обнаружения: если αijобн=0, то rij=0.
На основе вектора номеров распределения Nраспред создают матрицу RЦР размерностью NУСП × NУСП; принимают счетчик объектов группы целей j=0, если элемент nраспредk>0,  то rЦР ij=rik,
то rЦР ij=rik,  и параметр j увеличивается на 1.
и параметр j увеличивается на 1.
Одновременно создают вектор номеров объектов целей, по которым будет произведено целераспределение: NЦР с элементами nЦР j=k, 
Нормируют матрицу RЦР: формируют матрицу  с элементами
с элементами

В результате значения элементов матрицы будут в интервале [0; 0,5]. Приводят матрицу  к требованиям алгоритма целераспределения по максимизации критерия:
к требованиям алгоритма целераспределения по максимизации критерия:

При формировании матрицы эффективности для одного критерия (минимизация по дальности, с матрицей эффективности  ) может возникать ситуация перекрестного движения объектов подгруппы УСП. Для уменьшения вероятности возникновения подобных траекторий вводят второй критерий: минимизация суммарной угловой дальности, которая представляет собой модуль разницы координат по ординате (параметр у). Матрицу Н значений данного критерия при этом формируют следующим образом:
) может возникать ситуация перекрестного движения объектов подгруппы УСП. Для уменьшения вероятности возникновения подобных траекторий вводят второй критерий: минимизация суммарной угловой дальности, которая представляет собой модуль разницы координат по ординате (параметр у). Матрицу Н значений данного критерия при этом формируют следующим образом:

Аналогично алгоритму для матрицы R, для матрицы Н проводят обнуление соответствующих элементов согласно матрице обнаружения Аобн, нормируют и приводят ее к варианту максимизации, с формированием итоговой матрицы  .
.
В этом случае, при наличии двух критериев, матрицу эффективности формируют как свертку двух критериев (которые уже были нормированы заранее) с весовым коэффициентом их значимости α∈[0; 1]:

Введение дополнительного ограничения на тактику действий группы беспилотных летательных аппаратов 9-16 и на коэффициент α позволяет обеспечить практически полное отсутствие пересечений траекторий беспилотных летательных аппаратов 9-16 при осуществлении целераспределения.
На втором этапе целераспределения применяют алгоритм модифицированного метода минимального элемента, для чего формируют матрицу стоимостей/эффективностей  , необходимую для алгоритма целераспределения размерностью n0×n0, где n0 - число подлежащих распределению объектов на текущий момент.
, необходимую для алгоритма целераспределения размерностью n0×n0, где n0 - число подлежащих распределению объектов на текущий момент.
Вычисляют значения суммы элементов матрицы стоимостей по строкам:
Выбирают объект группы беспилотных летательных аппаратов 9-16, обладающий наихудшими характеристиками:
Выбирают объект группы целей, обладающий наилучшей эффективностью при воздействии на него выбранного объекта БЛА - назначают imin на объект jmax:
Проводят назначение - записывают в матрицу ZR:
Вычеркивают строку с номером imin и столбец с номером jmax из общей матрицы Р, для элемента которой проведено назначение:

Уменьшают индекс размерности матрицы Р: k=k-1.
Проверяют условие k=0. Если условие выполняется, то производят вывод матрицы распределения беспилотных летательных аппаратов ZR - результата целераспределения.
Передают полученную информацию обратно в модуль обмена информацией 26-28.
Затем с помощью модулей обмена информацией 26-28 передают результат целераспределения всем беспилотным летательным аппаратам 9-16, и с помощью модулей наведения 20-22 каждого беспилотного летательного аппарата 9-16 на основе результата целераспределения осуществляют выбор необходимой цели 1-8 для наведения по соответствующим координатам.
Способ автоматического группового целераспределения беспилотных летательных аппаратов наиболее эффективен при наличии значительного количества беспилотных летательных аппаратов в группировке, ограниченного количества критериев по определению класса объектов при сложных условиях их селекции (в связи с наличием радиоэлектронного противодействия), а также уязвимости модуля системы обмена информации к помеховому воздействию и навязыванию информации. Также для корректного осуществления способа автоматического группового целераспределения беспилотных летательных аппаратов необходимо обеспечить движение беспилотных летательных аппаратов в строе с параметрами, учитывающими квази-одновременное обнаружение целей и условие нахождение в зоне действия модулей системы обмена информацией, а также синхронную работу радиоэлектронных систем для обеспечения электромагнитной совместимости.
Система для автоматического группового целераспределения беспилотных летательных аппаратов состоит, по меньшей мере, из двух устройств распределения целей, каждое из которых установлено на отдельном беспилотном летательном аппарате. На фиг. 3 изображена схема системы для автоматического группового целераспределения беспилотных летательных аппаратов, предназначенной для трех беспилотных летательных аппаратов и состоящей из трех устройств распределения целей 17, 18 и 19.
В состав каждого устройства распределения целей 17, 18 или 19 входят модуль наведения 20, 21 или 22, модуль анализа информации 23, 24 или 25, и модуль обмена информацией 26, 27 или 28. при этом первый выход модуля наведения 20, 21 или 22 соединен с первым входом модуля обмена информацией 26, 27 или 28, первый вход модуля наведения 20, 21 или 22 соединен с первым выходом модуля анализа информации 23, 24 или 25, второй выход модуля наведения 20, 21 или 22 соединен с первым входом модуля анализа информации 23, 24 или 25, второй вход модуля обмена информацией 26, 27 или 28 соединен со вторым выходом модуля анализа информации 23, 24 или 25, первый выход модуля обмена информацией 26, 27 или 28 соединен со вторым входом модуля анализа информации 23, 24 или 25, при этом каждый модуль обмена информации 26, 27 или 28 каждого устройства распределения целей 17, 18 или 19 выполнен с возможностью обмена данными с другими модулями обмена информацией 26, 27 или 28 в составе устройств распределения целей 17, 18 или 19 системы распределения целей.
Модуль наведения 20, 21 или 22 может быть выполнен в виде головки самонаведения беспилотного летательного аппарата, например, оптической, лазерной или радиолокационной.
Модуль анализа информации 23, 24 или 25 может быть выполнен в виде бортовой цифровой вычислительной машины в составе головки самонаведения.
Модуль обмена информацией 26, 27 или 28 может быть выполнен в виде радиосвязного оборудования беспилотного летательного аппарата и содержит антенны для обмена информацией с другими модулями обмена информацией 26, 27 или 28 в составе устройств распределения целей 17, 18 или 19 системы распределения целей.
В частном случае, изображенном на фиг. 3, система для автоматического группового целераспределения беспилотных летательных аппаратов состоит из трех устройств распределения целей 17, 18 и 19.
В состав первого устройства распределения целей 17 входят первый модуль наведения 20, первый модуль анализа информации 23, и первый модуль обмена информацией 26. При этом первый выход первого модуля наведения 20 соединен с первым входом первого модуля обмена информацией 26, первый вход первого модуля наведения 20 соединен с первым выходом первого модуля анализа информации 23, второй выход первого модуля наведения 20 соединен с первым входом первого модуля анализа информации 23, второй вход первого модуля обмена информацией 26 соединен со вторым выходом первого модуля анализа информации 23, первый выход первого модуля обмена информацией 26 соединен со вторым входом первого модуля анализа информации 23.
В состав второго устройства распределения целей 18 входят второй модуль наведения 21, второй модуль анализа информации 24, и второй модуль обмена информацией 27. При этом первый выход второго модуля наведения 21 соединен с первым входом второго модуля обмена информацией 27, первый вход второго модуля наведения 21 соединен с первым выходом второго модуля анализа информации 24, второй выход второго модуля наведения 21 соединен с первым входом второго модуля анализа информации 24, второй вход второго модуля обмена информацией 27 соединен со вторым выходом второго модуля анализа информации 24, первый выход второго модуля обмена информацией 27 соединен со вторым входом второго модуля анализа информации 24.
В состав третьего устройства распределения целей 19 входят третий модуль наведения 22, третий модуль анализа информации 25, и третий модуль обмена информацией 28. При этом первый выход третьего модуля наведения 22 соединен с первым входом третьего модуля обмена информацией 28, первый вход третьего модуля наведения 22 соединен с первым выходом третьего модуля анализа информации 25, второй выход третьего модуля наведения 22 соединен с первым входом третьего модуля анализа информации 25, второй вход третьего модуля обмена информацией 28 соединен со вторым выходом третьего модуля анализа информации 25, первый выход третьего модуля обмена информацией 28 соединен со вторым входом третьего модуля анализа информации 25.
Система для автоматического группового целераспределения беспилотных летательных аппаратов работает следующим образом:
Производят целераспределение группы однородных беспилотных летательных аппаратов 9-16 по группе неоднородных целей 1-8, в состав которой входит, по меньшей мере, одна главная цель 1, а также неопределенное количество второстепенных целей 2-4 и ложных целей 5-8. Сканируют область вероятного положения целей 1-8 с помощью модулей наведения 20-22, входящих в состав каждого беспилотного летательного аппарата 9-16, производят обмен информацией об обнаруженных целях 1-8 с помощью модулей обмена информацией 26-28, входящих в состав каждого беспилотного летательного аппарата 9-16, а также передают указанную информацию на модули анализа информации 23-25, входящие в состав каждого беспилотного летательного аппарата 9-16. Данные, которые передают между беспилотными летательными аппаратами 9-16 при помощи модулей обмена информацией 26-28: координаты обнаруженных целей 1-8 и вектор их типов.
С помощью модулей анализа информации 23-25, получив информацию об обнаруженных целях 1-8 от модулей наведения 20-22 и модулей обмена информацией 26-28, осуществляют расчет целераспределения, например, с помощью способа автоматического группового целераспределения беспилотных летательных аппаратов, при котором формируют матрицу обнаружения целей Аобн размерностью NУСП×NНК, где NУСП - количество беспилотных летательных аппаратов (9-16), NНК - количество обнаруженных целей (1-8), состоящую из дискретного множества значений (0 - не обнаружено; 1 - главная цель 1; 2 - второстепенная цель 2-4; 3 - ложная цель 5-8).
Производят расчет надежности идентификации с помощью модуля анализа информации 23-25.
Для формирования параметра надежности идентификации главной цели в группе целей 1-8 необходимо выполнить следующие действия с помощью модулей анализа информации 23-25:
Формируют матрицу количества обнаружения объектов группы целей по типу цели среди всех беспилотных летательных аппаратов:

где Nтип - количество типов объектов, имеющихся в конфигурации целей; Nтип=3, NНК - количество объектов группы целей, nijобн - количество обнаружений каждой из целей в виде объекта соответствующего типа.
Формируют матрицу частоты обнаружения объектов группы целей по типу цели:
Вычитают из частоты обнаружения главной цели частоту определения ложных целей:

При pj обн<0 принимается рjобн=0.
Определяют рmax - максимальный элемент матрицы робн и его номер nmax:

При рmax>Робн тип 1 объект группы целей считают идентифицированным как главная цель. В исследовании принимают значение Pобн тип 1=0,1. Если же pmax<Pобн тип 1, то принимают решение, что главная цель не идентифицирована: слишком много помех, связанных с наличием ложных целей.
Производят модификацию матрицы Робн следующим образом, получая матрицу 

Таким образом, если главная цель с номером nmax выделена, то для нее элемент матрицы  для типа 1 принимается равным 1, а остальные типы приравниваются нулю, а для всех остальных объектов группы целей, для которых имеют место ненулевые частоты идентификации, элементы матрицы
для типа 1 принимается равным 1, а остальные типы приравниваются нулю, а для всех остальных объектов группы целей, для которых имеют место ненулевые частоты идентификации, элементы матрицы  для типа 3 складываются с элементами для типа 1, т.е. главная цель признается ложной.
для типа 3 складываются с элементами для типа 1, т.е. главная цель признается ложной.
Если в составе группы целей 1-8 имеются несколько главных целей 1, то в этом случае с помощью модулей анализа информации 23-25 повторяют процедуру нахождения в векторе робн следующего максимального элемента, но уже с ограничением Pобн тип 1=0,5: если есть две цели с  то они обе принимаются как главные цели для беспилотных летательных аппаратов 9-16. В этом случае возможен вариант, когда ложная цель будет идентифицирована как вторая главная цель, поэтому для алгоритма идентификации модулей анализа информации 23-25 необходимо заранее поставить дополнительное условие возможности наличия второй главной цели. Распределение между главными целями проводят равномерно.
то они обе принимаются как главные цели для беспилотных летательных аппаратов 9-16. В этом случае возможен вариант, когда ложная цель будет идентифицирована как вторая главная цель, поэтому для алгоритма идентификации модулей анализа информации 23-25 необходимо заранее поставить дополнительное условие возможности наличия второй главной цели. Распределение между главными целями проводят равномерно.
Присваивают идентификационные типы объектов путем модификации матрицы Аобн и получения матрицы 

Таким образом, для каждого объекта группы целей в матрице  определяют частоту больше 0,5, и для нее соответствующий индекс считают идентифицированным типом, который проставляется по всем объектам подгруппы БЛА. При наличии равных вероятностей для какого-либо объекта целей в качестве типа данной цели принимается более высокий (т.е. в базовом алгоритме для целей из типов 2 и 3 выбирается тип 2).
определяют частоту больше 0,5, и для нее соответствующий индекс считают идентифицированным типом, который проставляется по всем объектам подгруппы БЛА. При наличии равных вероятностей для какого-либо объекта целей в качестве типа данной цели принимается более высокий (т.е. в базовом алгоритме для целей из типов 2 и 3 выбирается тип 2).
Формируют целераспределение группы беспилотных летательных аппаратов по объектам группы целей с помощью модулей анализа информации 23-25 на основе минимизации суммарного расстояния между объектами группы целей при формировании матрицы назначения. В качестве базового метода целераспределения используют модифицированный метод минимального элемента. Так как используют критерий минимума расстояния, то для корректной работы алгоритма целераспределения, максимизирующего эффективность, необходимо не только нормировать матрицу, но и инвертировать ее ненулевые элементы в интервале [0; 1].
Целераспределение производят в два этапа. На первом этапе осуществляют построение матрицы эффективности, на втором этапе применяют алгоритм модифицированного метода минимального элемента.
Осуществляют построение матрицы эффективности, для чего рассчитывают расстояния между всеми парами объектов систем; параметр - матрица R размерностью Nycu × NHK:

Обнуляют элементы матрицы R, для которых не было обнаружения: если aij обн=0, то rij=0.
На основе вектора номеров распределения Nраспред создают матрицу RЦР размерностью NУСП×NУСП; принимают счетчик объектов группы целей j=0, если элемент  то
то  и параметр j увеличивается на 1. Одновременно создают вектор номеров объектов целей, по которым будет произведено целераспределение: NЦР, с элементами nЦР j=k,
и параметр j увеличивается на 1. Одновременно создают вектор номеров объектов целей, по которым будет произведено целераспределение: NЦР, с элементами nЦР j=k, 
Нормируют матрицу RЦР: формируют матрицу  с элементами
с элементами

В результате значения элементов матрицы будут в интервале [0; 0,5]. Приводят матрицу  к требованиям алгоритма целераспределения по максимизации критерия:
к требованиям алгоритма целераспределения по максимизации критерия:

При формировании матрицы эффективности для одного критерия (минимизация по дальности, с матрицей эффективности  ) может возникать ситуация перекрестного движения объектов подгруппы УСП. Для уменьшения вероятности возникновения подобных траекторий вводят второй критерий: минимизация суммарной угловой дальности, которая представляет собой модуль разницы координат по ординате (параметр у). Матрицу Н значений данного критерия при этом формируют следующим образом:
) может возникать ситуация перекрестного движения объектов подгруппы УСП. Для уменьшения вероятности возникновения подобных траекторий вводят второй критерий: минимизация суммарной угловой дальности, которая представляет собой модуль разницы координат по ординате (параметр у). Матрицу Н значений данного критерия при этом формируют следующим образом:

Аналогично алгоритму для матрицы R, для матрицы Н проводят обнуление соответствующих элементов согласно матрице обнаружения Аобн, нормируют и приводят ее к варианту максимизации, с формированием итоговой матрицы  .
.
В этом случае, при наличии двух критериев, матрицу эффективности формируют как свертку двух критериев (которые уже были нормированы заранее) с весовым коэффициентом их значимости α∈[0; 1]:

Введение дополнительного ограничения на тактику действий группы беспилотных летательных аппаратов 9-16 и на коэффициент α позволяет обеспечить практически полное отсутствие пересечений траекторий беспилотных летательных аппаратов 9-16 при осуществлении целераспределения.
На втором этапе целераспределения применяют алгоритм модифицированного метода минимального элемента, для чего формируют матрицу стоимостей/эффективностей  , необходимую для алгоритма целераспределения размерностью n0×n0, где n0 - число подлежащих распределению объектов на текущий момент.
, необходимую для алгоритма целераспределения размерностью n0×n0, где n0 - число подлежащих распределению объектов на текущий момент.
Вычисляют значения суммы элементов матрицы стоимостей по строкам:
Выбирают объект группы беспилотных летательных аппаратов 9-16, обладающий наихудшими характеристиками:
Выбирают объект группы целей, обладающий наилучшей эффективностью при воздействии на него выбранного объекта БЛА - назначают imin на объект jmax:
Проводят назначение - записывают в матрицу ZR:
Вычеркивают строку с номером imin и столбец с номером jmax из общей матрицы Р, для элемента которой проведено назначение:

Уменьшают индекс размерности матрицы Р: k=k-1.
Проверяют условие k=0. Если условие выполняется, то производят вывод матрицы распределения беспилотных летательных аппаратов ZR -результата целераспределения.
Передают результат целераспределения в модуль обмена информацией 26-28. Затем с помощью модулей обмена информацией 26-28 передают результат целераспределения всем беспилотным летательным аппаратам 9-16, и с помощью модулей наведения 20-22 каждого беспилотного летательного аппарата 9-16 на основе результата целераспределения осуществляют выбор необходимой цели 1-8 для наведения по соответствующим координатам.
Способ автоматического группового целераспределения беспилотных летательных аппаратов и система для его реализации предназначены для применения в области систем управления беспилотных летательных аппаратов для распределению группы летательных аппаратов между группой целей, и позволяют повысить вероятность выявления главной цели и оптимизировать распределение беспилотных летательных аппаратов между главной целью и второстепенными целями, а также повысить устойчивость к информационному противодействию.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления вооружением летательных аппаратов | 2021 |
|
RU2780716C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2551267C1 |
| КОМПЛЕКС СВЯЗИ ПОДВИЖНОГО ОБЪЕКТА, СОДЕРЖАЩИЙ АВИАЦИОННЫЙ ТЕРМИНАЛ | 2022 |
|
RU2791279C1 |
| КОМПЛЕКС СВЯЗИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2023 |
|
RU2830514C1 |
| Беспилотный летательный аппарат-перехватчик | 2024 |
|
RU2825353C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2748133C1 |
| Устройство перехвата беспилотных летательных аппаратов | 2020 |
|
RU2738383C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ЦЕЛЕРАСПРЕДЕЛЕНИЯ ИСТРЕБИТЕЛЕЙ С УЧЕТОМ ВОЗМОЖНОГО ВЫБЫВАНИЯ УЧАСТНИКОВ | 2017 |
|
RU2684963C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2022 |
|
RU2791341C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ИСТРЕБИТЕЛЯ | 2010 |
|
RU2439461C1 |
Изобретение относится к области систем управления беспилотных летательных аппаратов, а именно распределению группы летательных аппаратов между группой целей, и может быть использовано в комплексе функциональных программ управления и наведения беспилотных летательных аппаратов. Способ автоматического группового целераспределения беспилотных летательных аппаратов заключается в том, что производят целераспределение группы однородных беспилотных летательных аппаратов по группе неоднородных целей, в состав которой входит, по меньшей мере, одна главная цель, а также неопределенное количество второстепенных целей и ложных целей, при этом осуществляют обмен информацией об обнаруженных целях между беспилотными летательными аппаратами и производят расчет целераспределения децентрализованно. Способ осуществляют с помощью системы для автоматического группового целераспределения беспилотных летательных аппаратов, состоящей, по меньшей мере, из двух устройств распределения целей, каждое из которых установлено на отдельном беспилотном летательном аппарате, в состав каждого устройства распределения целей входят модуль наведения, модуль анализа информации, модуль обмена информацией, при этом каждый модуль обмена информации каждого устройства распределения целей выполнен с возможностью обмена данными с другими модулями обмена информацией в составе системы распределения целей. Технический результат - повышение вероятности выявления главной цели и оптимизация распределения беспилотных летательных аппаратов между главной целью и второстепенными целями, а также устойчивость к информационному противодействию за счет согласованного и децентрализованного между отдельными беспилотными летательными аппаратами распределения целей. 2 н.п. ф-лы, 3 ил.
1. Способ автоматического группового целераспределения беспилотных летательных аппаратов, заключающийся в том, что производят целераспределение группы однородных беспилотных летательных аппаратов по группе неоднородных целей, в состав которой входит, по меньшей мере, одна главная цель, а также неопределенное количество второстепенных целей и ложных целей, отличающийся тем, что сканируют область вероятного положения целей с помощью модулей наведения, входящих в состав каждого беспилотного летательного аппарата, производят обмен информацией об обнаруженных целях с помощью модулей обмена информацией, входящих в состав каждого беспилотного летательного аппарата, передают указанную информацию на модули анализа информации, входящие в состав каждого беспилотного летательного аппарата, с помощью модулей анализа информации формируют матрицу обнаружения целей Aобн размерностью NУСП×NНК, где NУСП - количество беспилотных летательных аппаратов, NНК - количество обнаруженных целей, состоящую из дискретного множества значений (0 - не обнаружено; 1 - главная цель; 2 - второстепенная цель; 3 - ложная цель), производят расчет надежности идентификации с помощью модуля анализа информации, для чего формируют матрицу количества обнаружения объектов группы целей по типу цели среди всех беспилотных летательных аппаратов:  где Nтип - количество типов объектов, имеющихся в конфигурации целей; Nтип=3, NНК - количество объектов группы целей, nijобн - количество обнаружений каждой из целей в виде объекта соответствующего типа, формируют матрицу частоты обнаружения объектов группы целей по типу цели:
где Nтип - количество типов объектов, имеющихся в конфигурации целей; Nтип=3, NНК - количество объектов группы целей, nijобн - количество обнаружений каждой из целей в виде объекта соответствующего типа, формируют матрицу частоты обнаружения объектов группы целей по типу цели:
вычитают из частоты обнаружения главной цели частоту определения ложных целей:

при pjобн<0 принимается pjобн=0, определяют рmax - максимальный элемент матрицы робн и его номер nmax: рmax=max(робн); nmax=arg(max(робн)), при рmax>Робнтип1 объект группы целей считают идентифицированным как главная цель и в исследовании принимают значение Робн тип1=0,1, если же pmax<Pобн тип 1, то принимают решение, что главная цель не идентифицирована, производят модификацию матрицы Робн следующим образом, получая матрицу  :
:

если главная цель с номером nmax выделена, то для нее элемент матрицы  для типа 1 принимается равным 1, а остальные типы приравниваются нулю, а для всех остальных объектов группы целей, для которых имеют место ненулевые частоты идентификации, элементы матрицы
для типа 1 принимается равным 1, а остальные типы приравниваются нулю, а для всех остальных объектов группы целей, для которых имеют место ненулевые частоты идентификации, элементы матрицы  для типа 3 складываются с элементами для типа 1, т.е. главная цель признается ложной, если в составе группы целей имеются несколько главных целей, то в этом случае с помощью модулей анализа информации 23-25 повторяют процедуру нахождения в векторе робн следующего максимального элемента, но уже с ограничением Pобн тип 1=0,5: если есть две цели с
для типа 3 складываются с элементами для типа 1, т.е. главная цель признается ложной, если в составе группы целей имеются несколько главных целей, то в этом случае с помощью модулей анализа информации 23-25 повторяют процедуру нахождения в векторе робн следующего максимального элемента, но уже с ограничением Pобн тип 1=0,5: если есть две цели с  , то они обе принимаются как главные цели, присваивают идентификационные типы объектов путем модификации матрицы Аобн и получения матрицы
, то они обе принимаются как главные цели, присваивают идентификационные типы объектов путем модификации матрицы Аобн и получения матрицы  :
:

для каждого объекта группы целей в матрице  определяют частоту больше 0,5, и для нее соответствующий индекс считают идентифицированным типом, который проставляется по всем объектам подгруппы БЛА, осуществляют построение матрицы эффективности, для чего рассчитывают расстояния между всеми парами объектов систем; параметр - матрица R размерностью NУСП × NНК:
определяют частоту больше 0,5, и для нее соответствующий индекс считают идентифицированным типом, который проставляется по всем объектам подгруппы БЛА, осуществляют построение матрицы эффективности, для чего рассчитывают расстояния между всеми парами объектов систем; параметр - матрица R размерностью NУСП × NНК:

обнуляют элементы матрицы R, для которых не было обнаружения: если aij обн=0, то rij=0, на основе вектора номеров распределения Nраспред создают матрицу RЦР, размерностью NУСП × NУСП; принимают счетчик объектов группы целей j=0, если элемент nраспред k>0,  то rЦРij=rik,
то rЦРij=rik,  и параметр j увеличивают на 1, создают вектор номеров объектов целей, по которым будет произведено целераспределение: NЦР с элементами nЦРj=k,
и параметр j увеличивают на 1, создают вектор номеров объектов целей, по которым будет произведено целераспределение: NЦР с элементами nЦРj=k,  нормируют матрицу RЦР: формируют матрицу
нормируют матрицу RЦР: формируют матрицу  с элементами
с элементами

приводят матрицу  к требованиям алгоритма целераспределения по максимизации критерия:
к требованиям алгоритма целераспределения по максимизации критерия:

вводят второй критерий: минимизация суммарной угловой дальности, которая представляет собой модуль разницы координат по ординате (параметр у), матрицу Н значений данного критерия при этом формируют следующим образом:

для матрицы Н проводят обнуление соответствующих элементов согласно матрице обнаружения Аобн, нормируют и приводят ее к варианту максимизации, с формированием итоговой матрицы  матрицу эффективности формируют как свертку двух критериев с весовым коэффициентом их значимости α∈[0; 1]:
матрицу эффективности формируют как свертку двух критериев с весовым коэффициентом их значимости α∈[0; 1]:

формируют матрицу стоимостей/эффективностей  , размерностью n0×n0, где n0 - число подлежащих распределению объектов на текущий момент, вычисляют значения суммы элементов матрицы стоимостей по строкам:
, размерностью n0×n0, где n0 - число подлежащих распределению объектов на текущий момент, вычисляют значения суммы элементов матрицы стоимостей по строкам:
выбирают объект группы беспилотных летательных аппаратов, обладающий наихудшими характеристиками:
выбирают объект группы целей, обладающий наилучшей эффективностью при воздействии на него выбранного беспилотного летательного аппарата - назначают imin на объект jmax:
проводят назначение - записывают в матрицу ZR:
вычеркивают строку с номером imin и столбец с номером jmax из общей матрицы Р, для элемента которой проведено назначение:

уменьшают индекс размерности матрицы Р: k=k-1, проверяют условие k=0, если условие выполняется, то производят вывод матрицы распределения беспилотных летательных аппаратов ZR - результата целераспределения, передают результат целераспределения в модуль обмена информацией беспилотного летательного аппарата, с помощью модулей обмена информацией передают результат целераспределения всем беспилотным летательным аппаратам, и с помощью модулей наведения каждого беспилотного летательного аппарата на основе результата целераспределения осуществляют выбор необходимой цели для наведения по соответствующим координатам.
2. Система для автоматического группового целераспределения беспилотных летательных аппаратов, в состав которой входят модуль наведения, модуль анализа информации, модуль обмена информацией, отличающаяся тем, что система состоит, по меньшей мере, из двух устройств распределения целей, каждое из которых установлено на отдельном беспилотном летательном аппарате, в состав каждого устройства распределения целей входят модуль наведения, модуль анализа информации, модуль обмена информацией, при этом первый выход модуля наведения соединен с первым входом модуля обмена информацией, первый вход модуля наведения соединен с первым выходом модуля анализа информации, второй выход модуля наведения соединен с первым входом модуля анализа информации, второй вход модуля обмена информацией соединен со вторым выходом модуля анализа информации, первый выход модуля обмена информацией соединен со вторым входом модуля анализа информации, при этом каждый модуль обмена информации каждого устройства распределения целей выполнен с возможностью обмена данными с другими модулями обмена информацией в составе системы распределения целей.
| US2010163621 A1, 01.07.2010 | |||
| Способ автоматического группового целераспределения истребителей с учетом приоритета целей | 2018 |
|
RU2690234C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ЦЕЛЕРАСПРЕДЕЛЕНИЯ ИСТРЕБИТЕЛЕЙ С УЧЕТОМ ВОЗМОЖНОГО ВЫБЫВАНИЯ УЧАСТНИКОВ | 2017 |
|
RU2684963C1 |
| СПОСОБ НАВЕДЕНИЯ НА ВЫСОКОСКОРОСТНЫЕ ВЫСОКОМАНЕВРЕННЫЕ ВОЗДУШНЫЕ ОБЪЕКТЫ | 2020 |
|
RU2751378C1 |
| В.Н | |||
| Евдокименков, М.Н | |||
| Красильщиков, Г.Г | |||
| Себряков | |||
| РАСПРЕДЕЛЕННАЯ ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ: АРХИТЕКТУРА И ПРОГРАММНО-МАТЕМАТИЧЕСКОЕ ОБЕСПЕЧЕНИЕ, Известия ЮФУ, Технические науки, 2016, | |||

