второй вход которого соединен с датчиком 5. Другой вход блока И со динен с выходом вычислителя 14 элект рсмагнитного момента. Входы вычислителя 14 связаны с датчиками 2, 4 и 13. Датчик 2 подключен к второму входу регулятора 6. При узеличении скорости-протекания процессов в устройстве обеспечивается переход к управлению, позволяющему существенно увеличить скорость изменения электромагнитного момента СД 1 . .Условием перехода к указанному управлению является превьшзение сигналом ошибки . по моменту на выходе блока 11 неко64294
торой пороговой величины, определяе мой зоной нечувствительности порогового элемента 12. Срабатывание последнего приводит к скачкообразному изменению .задания на продольную составляющую статорного тока Ij . С рос том тока Ij происходит форсированный рост тока возбуждения за счет трансформаторной связи между обмотками статора и ротора, а следовательно, и рост электромагнитного момента СД 1, определяемого величиной произведения Го- i при неизменном питающем напряжения . 1 з.п. ф-лы. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1984 |
|
SU1264292A1 |
| Частотно-регулируемый синхронный электропривод | 1983 |
|
SU1107242A1 |
| Электропривод с синхронным двигателем | 1972 |
|
SU553948A3 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Электропривод | 1983 |
|
SU1170575A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Частотно-регулируемый синхронный электропривод | 1986 |
|
SU1319220A2 |
| Электропривод | 1983 |
|
SU1167688A1 |
| Устройство для испытания механической трансмиссии | 1988 |
|
SU1585704A1 |
| Электропривод | 1987 |
|
SU1439729A1 |
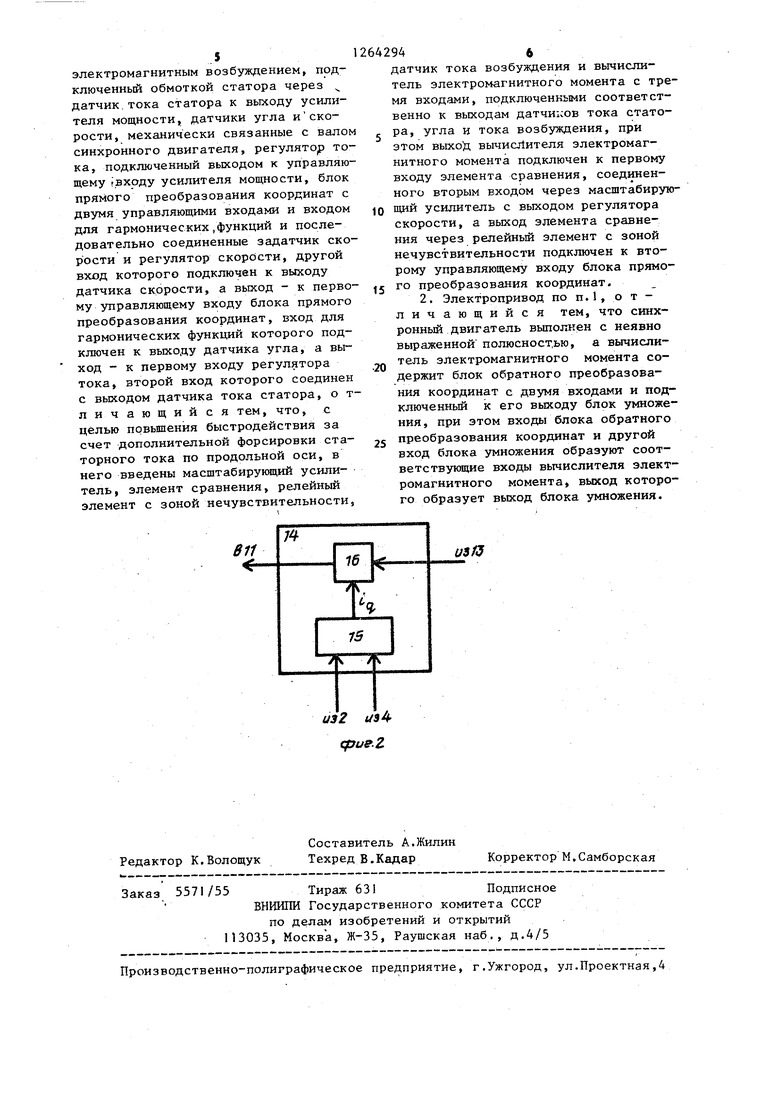
Изобретение относится к электротехнике и может быть использовано в системах и механизмах общепромышленного назначения. Целью изобретения является повьш1ение быстродействия. Электропривод переменного тока содержит синхронный двигатель (СД) Iс датчиком 2 тока статора, датчиком 13 возбуждения, датчиком 4 угла и датчиком 5 частоты вращения ротора. Блок 7 прямого преобразования через регулятор 6 тока, усилитель 3 мощности и датчик 2 подключен к СД 1 . Вход для гармонических функций блока 7 подключен к датчику 4, первый управляющий вход блока 7 через регулятор 9 скорости - к задатчику скорости, а второй управляющий вход блока 7 через релейный элемент 12 с зоной нечувствительности связан с выходом блока II сравнения. Один вход блока I1через масштабирующий усилитель подключен к выходу регулятора 9,
«
Изобретение относится к электро- технике, а именно к управляемому электроприводу переменного тока, построенному на основе синхронного двигателя и может быть использовано в системах и механизмах общепромышленного назначения для регулирования скорости и положения нагрузки с высокими требованиями по точности.
Целью изобретения является повышение быстродействия за счет дополнительной форсировки статорного тока синхронного двигателя по продольной оси.
На фиг.1 представлена функциональная схема электропривода переменного тока; на фиг.2 - схема вычислителя электромагнитного момента.
Электропривод переменного тока содержит синхронный двигатель 1 (фиг.1) с электромагнитным возбуждением, подключенный обмоткой статора через датчик 2 тока статора к выходу усилителя 3 мощности, датчики угла 4 и скорости 5, механически связанные с валом синхронного двигателя 1, регулятор 6 тока, подключенный выходом к управляющему входу усилителя 3 мощности, блок 7 прямого преобразования координат с двумя управляющими входами и входом для гармонических функций и последовательно соединенные задатчик 8 скорости и регулятор 9 скорости, другой вход кЬторого подключен к выходу датчика 5 скорости, а выход - к первому управляющему входу блока 7 преобразователя координат, вход для гармонических функций которого подключен к выходу датчика 4 угла, а выход к первому входу регулятора 6 тока, второй вход которого соединен с выходом датчика 2 тока статора.
В электропривод переменного тока введены масщтабирующий усилитель 10, элемент 11 сравнения, релейный элемент 12 с зоной нечувствительности, датчик 13 тока возбуждения, вычислитель 14 электромагнитного момента с тремя входами, подключенными COOTветственио к выходам датчиков тока статора 2, угла 4 и тока возбуждения 13, при этом выход вычислителя Г4 электромагнитного момента подключен к первому входу элемента 11 сравнения, соединенного вторым входом через масштабирующий усилитель 10 с выходом регулятора 9 скорости, а выход элемента 11 сравнения через релейный элемент 12 с зоной нечувст|вительиости подключен к второму уп- . равляющему входу блока 7 прямого преобразования координат.
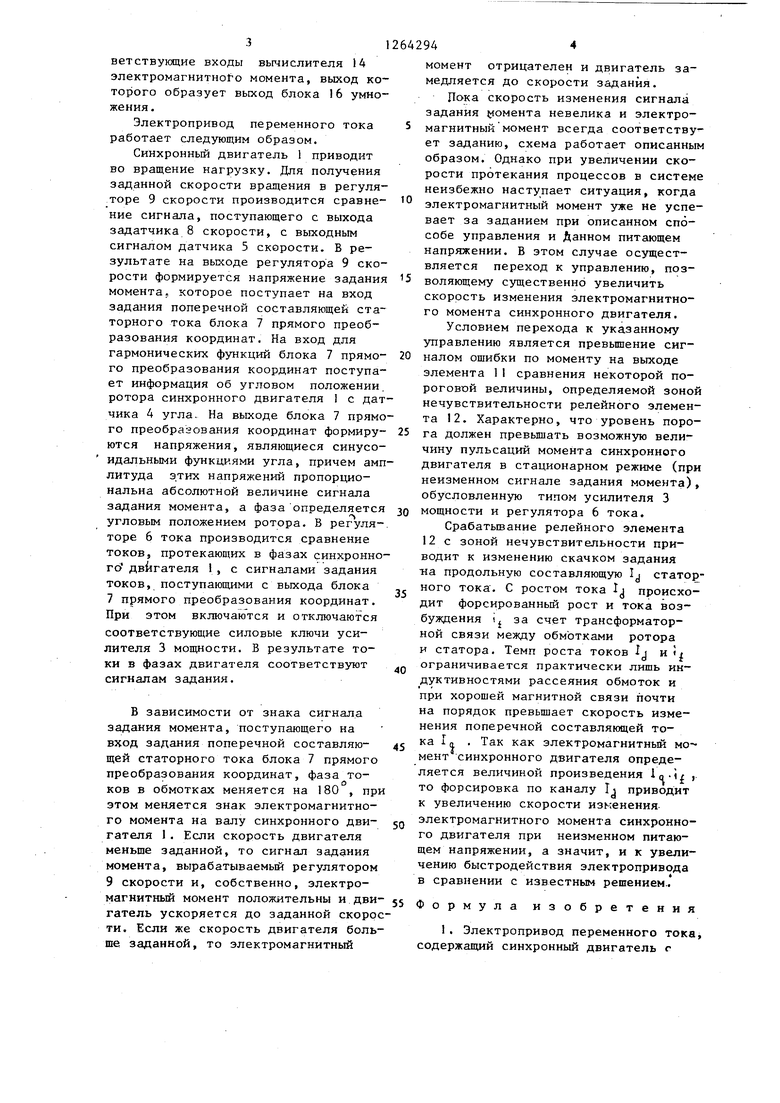
Синхронный двигатель 1 может быть вьтолнен с неявно выраженной полюсностью, а вычислитель 14 электромагнитного момента может содержать блок 15 обратного преобразования координат (фиг.2) с двумя входами и подключенный к его выходу блок 16 умножения, при этом входы
блока 16 умножения образуют соответствующие входы вьп иcлитeля 14 электромагнитного момента, выход которого образует выход блока 16 умножения . Электропривод переменного тока работает следующим образом. Синхронный двигатель 1 приводит во вращение нагрузку. Для получения заданной скорости вращения в регуляторе 9 скорости производится сравнение сигнала, поступающего с выхода задатчика 8 скорости, с выходным сигналом датчика 5 скорости. В результате на выходе регулятора 9 скорости формируется напряжение задания момента, которое поступает на вход задания поперечной составляющей статорного тока блока 7 прямого преобразования координат. На вход для гармонических функций блока 7 прямого преобразования координат поступает информация об угловом положении ротора синхронного двигателя I с дат чика 4 угла. На выходе блока 7 прямо го преобразования координат формируются напряжения, являющиеся синусоидальными функциями угла, причем амп литуда з.ткх напряжений пропорциональна абсолютной величине сигнала задания момента, а фаза определяется угловым положением ротора. В регуля6 тока производится торе b тока производится сравнение токов, протекающих в фазах синхронно го двигателя 1, с сигналами задания токов, поступающими с выхода блока 7 прямого преобразования координат. При этом включаются и отключаются соответствующие силовые ключи усилителя 3 мощности. В результате токи в фазах двигателя соответствуют сигналам задания. В зависимости от знака сигнала задания момента, поступающего на вход задания поперечной составляющей статорного тока блока 7 прямого преобразования координат, фаза токов в обмотках меняется на 180 , пр этом меняется знак электромагнитного момента на валу синхронного двигателя 1. Если скорость двигателя меньше заданной, то сигнал задания момента, вырабатываемый регулятором 9 скорости и, собственно, электромагнитный момент положительны и дви гатель ускоряется до заданной скоро ти. Если же скорость двигателя боль ше заданной, то электромагнитный 944 момент отрицателен и двигатель замедляется до скорости задания. Пока скорость изменения сигнала задания (омента невелика и электромагнитный момент всегда соответствует заданию, схема работает описанным образом. Однако при увеличении скорости протекания процессов в системе неизбежно наступает ситуация, когда электромагнитный момент уже не успевает за заданием при описанном способе управления и Данном питающем напряжении. В этом случае осуществляется переход к управлению, позволяющему существенно увеличить скорость изменения электромагнитного момента синхронного двигателя. Условием перехода к указанному управлению является превьшение сигналом ошибки по моменту на выходе элемента 11 сравнения некоторой пороговой величины, определяемой зоной нечувствительности релейного элемента 12. Характерно, что уровень порога должен превышать возможную величину пульсаций момента синхронного двигателя в стационарном режиме (при неизменном сигнале задания момента), обусловленную типом усилителя 3 мощности и регулятора 6 тока, Срабатьшание релейного элемента 12 с зоной нечувствительности приводит к изменению скачком задания на продольную составляющую Ij статорного тока. С ростом тока Ij происходит форсированньш рост и тока возбуждения ij за счет трансформаторной связи между обмотками ротора и статора. Темп роста токов Ij и « ограничивается практически лишь ин- дуктивностями рассеяния обмоток и при хорошей магнитной связи почти на порядок превышает скорость изменения поперечной составляющей тока Г „ Так как электромагнитный момент синхронного двигателя определяется величиной произведения q-if i то форсировка по каналу Ij приводит к увеличению скорости изменения электромагнитного момента синхронного двигателя при неизменном питающем напряжении, а значит, и к увеличению быстродействия электропривода в сравнении с известным решением.. Формула изобретения 1. Электропривод переменного тока, содержащий синхронный двигатель г электромагнитным возбуждением, прдключенньй обмоткой статора через датчик.тока статора к выходу усилителя мощности, датчики угла искорости, механически связанные с валом синхронного двигателя, регулятор тока, подключенный выходом к управляющему (ВХОДУ усилителя мощности, блок прямого преобразования координат с двумя управляющими входами и входом для гармонических,функций и последовательно соединенные задатчик скорости и регулятор скорости, другой вход которого подключен к выходу датчика скорости, а выход - к первому управляющему входу блока прямого преобразования координат, вход для гармонических функций которого подключен к выходу датчика угла, а выход - к первому входу регулятора тока, второй вход которого соединен с выходом датчика тока статора, о тличающийся тем, что, с целью повьшения быстродействия за счет дополнительной форсировки статорного тока по продольной оси, в него введены масштабирующий усилитель, элемент сравнения, релейный элемент с зоной нечувствительности.
из 2 /s4
Cpuff.Z 946 датчик тока возбуждения и вычислитель электромагнитного момента с тремя входами, подключенными соответственно к выходам датчиков тока статора, угла и тока возбуждения, при этом выход вычислителя электромагнитного момента подключен к первому входу элемента сравнения, соединенного вторым входом через масштабирующий усилитель с выходом регулятора скорости, а выход элемента сравнения через релейный элемент с зоной нечувствительности подключен к второму управляющему входу блока прямого преобразования координат. 2, Электропривод по п.1, о т - личающийся тем, что синхронный двигатель выполнен с неявно выраженной полюсност,ью, а вычислитель электромагнитного момента содержит блок обратного преобразования координат с двумя входами и подключенный к его выходу блок умножения , при этом входы блока обратного преобразования координат и другой вход блока умножения образуют соот- ветствукяцие входы вычислителя электромагнитного момента, выход которого образует выход блока умножения.
| Устройства и элементы систем автоматического регулирования и у равления | |||
| Техническая кибернетика | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Исполнительные устройств и сервомеханизмы / Под ред | |||
| В.В.Со лодовникова | |||
| М.: Машиностроение, 1976 | |||
| Боченков Б.М., Шраменко С.Г | |||
| Бесконтактные электроприводы с шир ким диапазоном регулирования | |||
| Элек ромеханические системы воспроизвед ния движений и их элементы | |||
| - Межвузовский сборник научных трудов | |||
| Под общей ред | |||
| В.Г.Кагана | |||
| Новосибирск: НЭТИ, 1981. | |||
