Изобретение относится к медицинской технике, а именно к транспортным средствам для самостоятельного передвижения и тренировок инвалидов.
Из источника RU 2707670 C1, В62М 1/00, 28.11.2019, известно устройство для передвижения людей с нарушением опорно-двигательного аппарата, содержащее установленную на колесах раму с сиденьем, упоры для ног и механизмы перемещения, снабженные рычагами ручного привода, звездочками и цепью, при этом на противоположных боковых поверхностях рамы устройства установлены конические редукторы, при этом каждый рычаг ручного привода для передвижения устройства, расположенный параллельно относительно рамы устройства, соединен с верхним концом вертикального вала, являющегося входным валом конического редуктора, на выходном горизонтальном вале которого расположена звездочка, соединенная цепной передачей со звездочкой трещоточного механизма, расположенного на оси заднего приводного колеса устройства, при этом один конец цепи закреплен на звездочке вала, а второй конец через пружину - на раме устройства.
Недостатком данного устройства является сложность приведения в движение устройства при нарушении здоровья и нарушении развития, недостаточных физических и умственных возможностях людей, передвигающихся с помощью данного устройства, возможность перемещения устройства только в ручном режиме, отсутствие возможности подключения электрической тяги для приведения во вращение приводных колес, возможность помощи пассажиру при передвижении устройства, отсутствие контроля за выполнением двигательных действий передвигающегося человека, приводящих к передвижению устройства, средствами объективного контроля (т.е. измерителями), отсутствие возможности оперативной корректировки двигательных действий человека для передвижения устройства.
Технический результат, достигаемый заявляемым изобретением, заключается в облегчении управления устройством для передвижения людей с нарушениями здоровья и развития, за счет возможности использования электрической тяги при передвижении устройства в ручном режиме, смены режимов передвижения устройства, в обеспечении контроля за выполнением двигательных действий человека, приводящих к передвижению устройства, средствами объективного контроля, и оперативной корректировки двигательных действий человека, приводящих к передвижению устройства.
Указанный технический результат достигается за счет использования устройства для передвижения людей с нарушением опорно-двигательного аппарата, содержащее установленную на колесах раму с сидением, упоры для стоп ног и механизмы перемещения для приведения в движение задних приводных мотор-колес, снабженные рычагами ручного привода, валами, звездочками и цепями, при этом каждое приводное мотор-колесо снабжено трещоточным механизмом, расположенным на оси мотор-колеса, кроме этого устройство для передвижения содержит тензодатчики, установленные на ручках рычагов, измеряющие усилия прикладываемые кистями рук человека к ручкам рычагов, измерители угла поворота каждого рычага, измерители момента вращения вала каждого рычага, измерители ускорений и скорости передвижения устройства, приводы управления мотор-колесами и источники питания, при этом устройство также содержит процессор, принимающий информацию от тензодатчиков и измерителей и, на основании полученной информации, формирующий сигналы управления электротягой мотор-колес, при этом органы приводов управления мотор-колес расположены на ручках рычагов.
Устройство содержит указатель заданного направления передвижения устройства и привод указателя заданного направления передвижения устройства.
Устройство содержит сиденье, которое выполнено с возможностью перемещения по направляющим вдоль рамы устройства.
На раме устройства расположены источники питания, выполненные в виде аккумуляторных батарей, для питания процессора и приводных электродвигателей мотор-колес.
Техническая сущность предлагаемого решения поясняется чертежами:
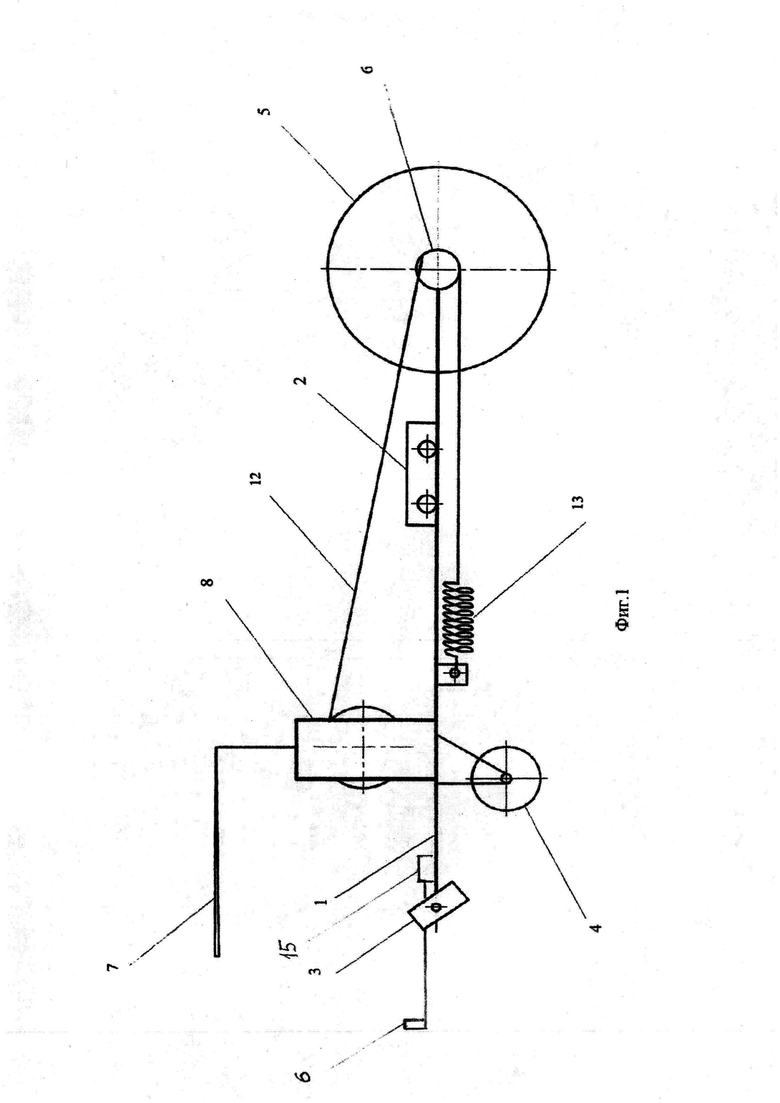
Фиг. 1 - схема устройства для передвижения, вид сбоку.
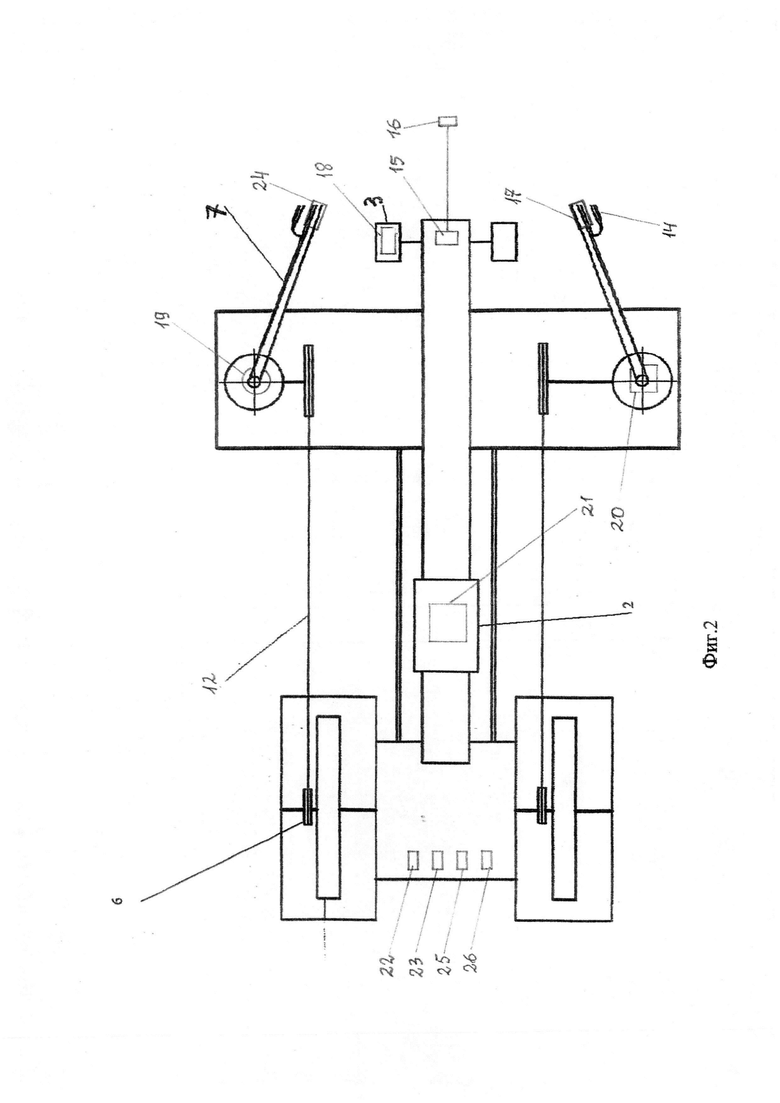
Фиг. 2 - схема устройства для передвижения, вид сверху.
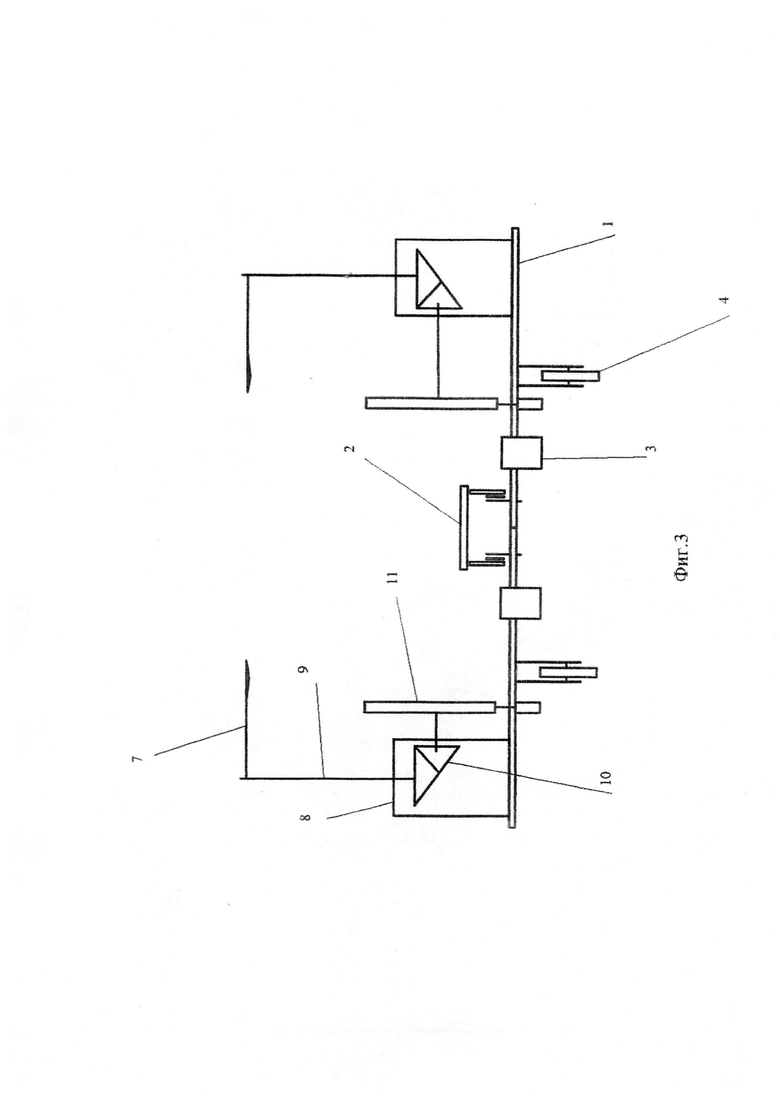
Фиг. 3 - схема устройства для передвижения, вид спереди.
Устройство для передвижения состоит из прямоугольной алюминиевой рамы (1) с сидением (2), которое установлено с возможностью перемещения по направляющим рамы (1). В передней части рамы установлены упоры для ног (3) и, по меньшей мере, одно не приводное колесо (4), расположенное под рамой и выполненное с возможностью вращения на 360°. В задней части рамы установлены два приводных мотор-колеса (5), на оси каждого из которых расположены звездочки трещоточных механизмов (6). В качестве приводных мотор-колес (5) могут быть использованы колеса от электровелосипедов. Для повышения маневренности устройства передняя часть рамы (1) может быть выполнена треугольной формы и снабжена зеркалами заднего вида.
На раме установлены механизмы перемещения устройства, снабженные рычагами (7) ручного привода мотор-колес, звездочками и цепью. На противоположных боковых поверхностях рамы устройства установлены конические редукторы (8). Каждый рычаг ручного привода (7) для передвижения устройства, расположенный параллельно относительно рамы (1) устройства, соединен с верхним концом вертикального вала (9), являющегося входным валом конического редуктора (8). При этом точка приложения силы находится на начале горизонтального рычага (7) на его ручке, конец которого соединен с верхним концом вертикального вала (9). На выходном горизонтальном вале (10) редуктора расположена звездочка (11), соединенная цепной передачей (12) со звездочкой трещоточного механизма (6), расположенного на оси заднего мотор-колеса (5) устройства. Один конец цепи (12) закреплен на звездочке вала (11), а второй конец через пружину (13) - на раме устройства (1). При этом цепь снабжена защитным кожухом.
На раме установлены приводные мотор-колеса (5) (правое и левое) и источники питания (25,26) для питания процессора (на фигурах не показан) и электродвигателей, выполненные в виде аккумуляторных батарей.
На ручках рычагов (7) установлены тензодатчики (17) (тактильные датчики усилия), измеряющие усилия, прикладываемые кистями рук передвигающего/занимающегося человека, т.е. определяющие насколько сильно человек сжал ручку рычага для приведения его в действие. Кроме этого, на ручках рычагов (7) расположены устройства управления (24) приводными мотор-колесами (3), на правом рычаге устройство управления правого заднего мотор-колеса, на левом - левого заднего мотор-колеса (устройства управления могут быть выполнены, например, в виде рычажка или «ручки газа» используемой на мотоцикле и т.д.), позволяющие регулировать крутящий момент электродвигателя мотор-колеса и, следовательно, скорость вращения каждого мотор-колеса, и переключатель для выбора режима движения устройства, который может быть выполнен в виде тумблера, кнопки или рычажка и т.д. (режимы работы описаны ниже).
В передней части рамы расположен привод указателя направления движения (15), выполненный, например, в виде электродвигателя, на конце штанги которого установлен указатель направления движения (16), выходящий за пределы рамы (см. фиг. 2). Привод указателя направления движения (15) получает команды от процессора для изменения направления указателя направления движения (16).
Приводной механизм содержит измерители угла поворота каждого рычага (19), предназначенные для измерения угла поворота рычага, и измерители момента вращения каждого вала (20), предназначенные для измерения усилия прилагаемого к рычагу с целью вращения приводного мотор-колеса. В качестве измерителей угла поворота рычага и момента вращения вала могут использоваться электронные динамометрические ключи типа Tohnichi СТА2 с угломером, выполненные с возможностью подключения к процессору.
Кроме этого, устройство для передвижения содержит измеритель скорости передвижения устройства и измеритель ускорений (22), выполненный в виде акселерометра Ардуино, который передает информацию в процессор по ускорениям по каждой координате на плоскости для вычисления скорости и расстояния по каждой координате.
Все вышеуказанные измерители (датчики) передают полученную информацию на процессор, который в соответствии с полученной информацией формирует сигналы (23) для управления электроприводами мотор-колес (3) и приводом указателя направления движения (15).
Кроме этого, устройство для передвижения снабжено механическими или гидравлическими тормозами (14), приводы которых расположены на рычагах управления (фиг. 2), обеспечивающими принудительное торможение задних приводных мотор-колес (3).
Устройство для передвижения выполнено с возможностью передвижения в нескольких режимах движения. Для выбора режимов движения устройства используется переключатель, расположенный на одном из рычагов управления.
При выборе режима передвижения устройства в ручном режиме, перемещение устройства осуществляется только с помощью рычагов ручного привода. При этом необходимо отметить, что процессор, тензодатчики и измерители не задействованы в данном режиме.
Для начала прямолинейного движения человек (т.е. пользователь устройства) притягивает оба рычага на себя, что приводит во вращение вертикальные валы и, следовательно, звездочки, закрепленные на нижнем конце валов. Далее пример работы устройства будет описан на примере перемещения одного рычага механизма перемещения (правого или левого), при этом второй рычаг механизма выполняет аналогичные действия при приведении механизма передвижения в действие. Вращение звездочки вала через цепь передается звездочке, установленной на оси приводного мотор-колеса, которая в свою очередь передает вращение мотор-колесу. Таким образом мотор-колесо начинает вращаться и приводит в движение устройство для передвижения. При этом перемещение цепи приводит к растяжению пружины, закрепленной одним концом на противоположном конце цепи, а другим - на раме устройства. Обратный ход рычага для приведения его в исходное положение обеспечивается трещоточным механизмом, расположенным на оси приводного мотор-колеса, и пружиной растяжения, приходящей в исходное положение после прекращения передачи усилия пассажиром на рычаг ручного привода. Таким образом, пассажиру после выполнения одного «гребка» не приходится прикладывать дополнительные усилия для приведения рычага в исходное положение. Затем пассажир заново приводит в движение рычаги.
Поскольку используемые в устройстве передвижения механизмы перемещения каждого мотор-колеса выполнены не зависимыми друг то друга, то обеспечивается возможность вращения каждого мотор-колеса не зависимо от другого в своем направлении и со своей скоростью.
Повороты устройства осуществляются следующим образом: для поворота налево следует притянуть к себе только правый рычаг, приводя во вращение только правое мотор-колесо, а для поворота направо следует притянуть к себе только левый рычаг, следовательно, приводя во вращение только левое мотор-колесо.
Для осуществления торможения устройства пассажир приводит в действие тормозные механизмы, установленные на каждом мотор-колесе, приводы которых расположены на рычагах управления.
При выборе режима передвижения устройства в полуавтоматическом режиме, перемещение устройства осуществляется с помощью рычагов ручного привода, процессора, измерителей и электроприводов мотор-колес.
Перед началом движения в процессор заносится информация о выбранном маршруте и заданной траектории движения устройства (например, необходимая информация о маршруте и траектории движения устройства заносится пользователем с помощью компьютерного устройства на съемный носитель информации, с помощью которого информация подгружается в блок управления процессора устройства), формируется покоординатный путь, фактически проходимый устройством передвижения. Данная информация закладывается и хранится в процессоре в виде координат точек на плоскости.
Указатель заданного направления передвижения устройства, установленный в передней части рамы, указывает направление, заданное процессором, в котором необходимо передвигаться устройству в соответствие с траекторией движения. При этом тензодатчики, установленные на ручках рычагов, измеряют усилия, прикладываемые кистями рук человека для притягивания рычага (рычагов) на себя для начала передвижения устройства. В случае если показания датчиков превышают установленное пороговое значение, которое также вводится в процессор перед началом передвижения в зависимости от физических возможностей перемещающегося человека (пороговое значение усилий, прикладываемых кистями рук человека для притягивания рычага (рычагов) на себя, сравнивается со значением угла поворотов рычагов, соответствующих значению, при котором должно придти в движение приводное мотор-колесо в режиме ручного управления, если передвижение мотор-колеса не происходит, то процессор подает сигнал на мотор-колесо для его включения), т.е. кисти рук человека сильно сжимают ручки рычагов, однако силы рук перемещающегося человека с нарушениями здоровья и развития не хватает для необходимого перемещения рычага (рычагов) (для осуществления начала движения устройства), то процессор подает команду на электропривод (электроприводы) для приведения во вращение мотор-колеса (мотор-колес), таким образом приводя в движение устройство. Далее передвижение устройства осуществляется рычагами аналогично описанному в ручном режиме.
При движении устройства измеритель ускорения передает информацию в процессор по ускорениям по каждой координате на плоскости. В процессе движения процессором осуществляется покоординатное сравнение каждой точки, заданной и фактической траекторий. При этом процессор подает сигнал на привод указателя заданного направления передвижения устройства, который поворачивает указатель заданного направления передвижения устройства в соответствии с заданной траекторией движения. В случае расхождения заданной и фактической траекторий процессор подает сигнал на привод указателя заданного направления передвижения устройства, который поворачивает указатель заданного направления передвижения устройства на угол равный рассогласованию точек заданной и фактической траекторий. Поворот указателя осуществляется в сторону требуемой корректировки фактического направления движения. Если процессор с помощью измерителей угла поворота рычага, момента вращения вала и измерителя скорости устройства, измеряющих угол поворота каждого рычага и усилия, прилагаемые к каждому рычагу и фактической скорости устройства, определяет, что необходимые движения рычагов для привода мотор-колес для совмещения фактической траектории с заданной траекторией движения устройства не производится самим человеком (т.е. пользователем устройства), то совмещение траекторий, происходит за счет включения электропривода необходимого мотор-колеса, обеспечивая поворот устройства в необходимую сторону (например, для поворота направо приводится в действие только левый электропривод, увеличивая скорость вращения левого мотор-колеса, относительно правого). Как только происходит совмещение фактической траектории с заданной, устройство переходит на ручное управление.
Для осуществления торможения устройства пассажир приводит в действие тормозные механизмы, установленные на каждом приводном мотор-колесе, приводы которых расположены на рычагах управления.
При выборе режима передвижения устройства в автоматическом режиме, перемещение устройства осуществляется с помощью процессора, измерителей и мотор-колес. При этом ручной привод мотор-колес в данном режиме не используется.
При этом необходимо отметить, что выбор маршрута и траектории движения устройства перед началом движения, работа привод указателя заданного направления передвижения устройства и указателя заданного направления передвижения устройства и совмещение фактической траектории от заданной траектории перемещения устройства в случае отклонения траекторий производятся аналогично вышеописанному полуавтоматическому режиму.
Для начала прямолинейного движения человек (т.е. пользователь устройства) небольшим усилием приводит в действие устройство управления каждого заднего приводного мотор-колеса, расположенные на ручке каждого рычага. Увеличение нажатия на устройство управления приводит к увеличению крутящего момента электродвигателя, который передается на приводные мотор-колеса. Плавное нажатие на привод влечет за собой плавное вращения мотор-колеса. Таким образом приводные мотор-колеса начинают вращаться и приводят в движение устройство для передвижения. Поскольку устройства управления каждого приводного мотор-колеса выполнены не зависимыми друг то друга, то обеспечивается возможность вращения каждого мотор-колеса не зависимо от другого со своей скоростью. Повороты устройства осуществляются следующим образом: для поворота налево следует привести в действие только правое устройство управления, приводя во вращение только правое мотор-колесо, или, если поворот происходит в процессе движения устройства, то необходимо увеличить скорость вращения правого мотор-колеса, относительно левого, а для поворота направо следует привести в действие только левое устройство управления, приводя во вращение только левое мотор-колесо, или, если поворот происходит в процессе движения устройства, то необходимо увеличить скорость вращения левого мотор-колеса, относительно правого.
Для осуществления торможения устройства человек не прикладывает усилия к устройствам управления и приводит в действие тормозные механизмы, установленные на каждом приводном мотор-колесе.
Таким образом, заявленное устройство для передвижения людей с нарушением опорно-двигательного аппарата позволяет облегчить управление людям с нарушениями здоровья и развития, за счет возможности использования электрической тяги при передвижении устройства в ручном режиме, обеспечить контроль и оперативную корректировку за выполнением двигательных действий человека, приводящих к передвижению устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство Крейндлина для передвижения людей с нарушением опорно-двигательного аппарата | 2018 |
|
RU2707671C1 |
| Устройство Крейндлина для передвижения людей с нарушением опорно-двигательного аппарата | 2018 |
|
RU2707670C1 |
| Устройство Крейндлина для передвижения людей с нарушением опорно-двигательного аппарата | 2018 |
|
RU2713127C1 |
| УСТРОЙСТВО КРЕЙНДЛИНА ДЛЯ ПЕРЕДВИЖЕНИЯ ЛЮДЕЙ С НАРУШЕНИЕМ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА (ЕГО ВАРИАНТЫ) (РУКОМОБИЛЬ КРЕЙНДЛИНА) | 1996 |
|
RU2109501C1 |
| Колесное транспортное средство с электрической системой управления | 2022 |
|
RU2782011C2 |
| ПРИВОД ДЛЯ ВЕЛОСИПЕДОВ И ВЕЛОМОБИЛЕЙ | 2005 |
|
RU2294859C1 |
| КОЛЯСКА ДЛЯ ИНВАЛИДОВ | 1990 |
|
RU2043097C1 |
| МАЛОГАБАРИТНЫЙ ВСЕСЕЗОННЫЙ УНИВЕРСАЛЬНЫЙ ГУСЕНИЧНЫЙ ВЕЗДЕХОД | 2013 |
|
RU2534202C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ ПО ПОВЕРХНОСТИ С НИЗКОЙ МЕХАНИЧЕСКОЙ УСТОЙЧИВОСТЬЮ | 2022 |
|
RU2780902C1 |
| Способ подготовки листа шпона к склейке на ус и станок кромкофрезерный с узлом фрезерования и устройством нанесения клея для его реализации | 2020 |
|
RU2740321C1 |
Изобретение относится к транспортным средствам для самостоятельного передвижения и тренировок инвалидов. Устройство для передвижения людей с нарушением опорно-двигательного аппарата содержит установленную на колесах раму с сидением, механизмы перемещения для приведения в движение задних приводных мотор-колес, снабженные рычагами ручного привода, валами, звездочками и цепями, тензодатчики, установленные на ручках рычагов, измерители угла поворота каждого рычага, момента вращения вала каждого рычага, ускорений и скорости передвижения устройства, устройства управления мотор-колесами, источники питания и процессор. Процессор принимает информацию от тензодатчиков и измерителей и, на основании полученной информации, формирует сигналы управления электротягой мотор-колес. Тензодатчики измеряют усилия прикладываемые кистями рук человека к ручкам рычагов. Устройства управления мотор-колес расположены на ручках рычагов. Достигается возможность использования электрической тяги при передвижении устройства в ручном режиме, смены режимов передвижения устройства, в обеспечении контроля за выполнением двигательных действий человека и оперативной корректировки двигательных действий человека. 4 з.п. ф-лы, 3 ил.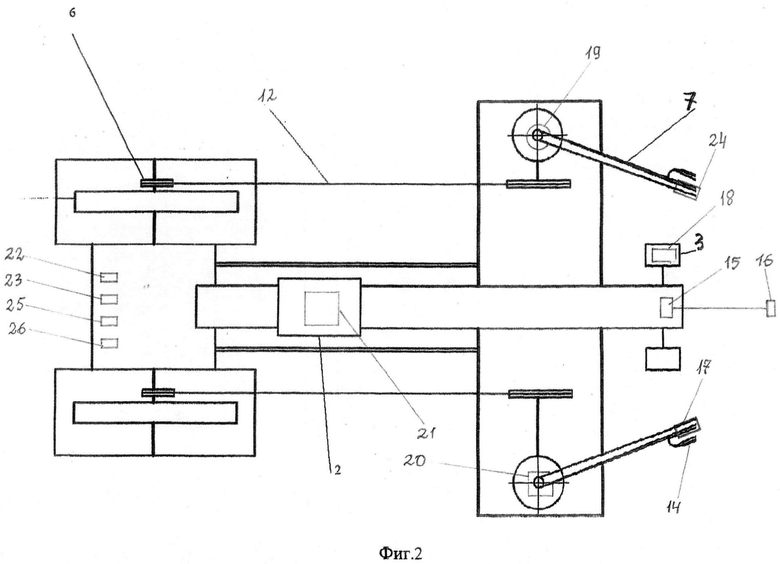
1. Устройство для передвижения людей с нарушением опорно-двигательного аппарата, содержащее установленную на колесах раму с сидением, упоры для стоп ног и механизмы перемещения для приведения в движение задних приводных колес, снабженные рычагами ручного привода, валами, звездочками и цепями, отличающееся тем, что задние приводные колеса выполнены в виде мотор-колес, при этом каждое мотор-колесо снабжено трещоточным механизмом, расположенным на оси мотор-колеса, при этом устройство содержит тензодатчики, установленные на ручках рычагов, измеряющие усилия, прикладываемые кистями рук человека к ручкам рычагов, измерители угла поворота каждого рычага, измерители момента вращения вала каждого рычага, измерители ускорений и скорости передвижения устройства, приводы управления мотор-колесами и источники питания, при этом устройство также содержит процессор, принимающий информацию от тензодатчиков и измерителей и, на основании полученной информации, формирующий сигналы управления электротягой мотор-колес, при этом устройства управления мотор-колес расположены на ручках рычагов.
2. Устройство для передвижения по п. 1, отличающееся тем, что дополнительно содержит указатель заданного направления передвижения устройства и привод указателя заданного направления передвижения устройства.
3. Устройство для передвижения по п. 1, отличающееся тем, что в передней части рамы установлено, по меньшей мере, одно не приводное колесо, расположенное под рамой и выполненное с возможностью вращения на 360°.
4. Устройство для передвижения по п. 1, отличающееся тем, что сидение выполнено с возможностью перемещения по направляющим вдоль рамы устройства.
5. Устройство для передвижения по п. 1, отличающееся тем, что источники питания выполнены в виде аккумуляторных батарей.
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПРИВОДА ИНВАЛИДНОГО КРЕСЛА-КОЛЯСКИ | 1995 |
|
RU2116774C1 |
| КОЛЯСКА ИНВАЛИДНАЯ | 2009 |
|
RU2400202C1 |
| Состав для борирования стальных изделий | 1981 |
|
SU1014982A1 |
| Устройство Крейндлина для передвижения людей с нарушением опорно-двигательного аппарата | 2018 |
|
RU2707670C1 |
| RU 21496020 C1, 27.05.2000. | |||

