Изобретение относится к системам наведения ракет, а именно к оборонительно-наступательным системам, и может быть использовано для уничтожения групповых целей с глубоководным стартом группами ракет, отделяемых от ракет-носителей.
Наиболее близким к предлагаемому является способ уничтожения целей ракетами, отделяемыми от ракеты-носителя (RU 2769168), в котором в оборонительно-наступательной системе (ОНС) назначают ракету-носитель (РН), а также станцию управления, и передают данные РН на станцию управления; на станции управления запускают РН; на РН и отделяемых ракетах определяют их текущие координаты и скорости и передают их через станцию управления в ОНС; в ОНС обнаруживают и сопровождают цели и определяют точные текущие координаты и скорости целей, а также их точные характеристики; в ОНС определяют текущие координаты точек прицеливания для отделяемых ракет, а также рассчитывают траектории и скорости полета РН и отделяемых ракет к целям и передают их на станцию управления; на станции управления формируют команды отделения ракет от РН в начале расчетных траекторий и передают их на РН; на станции управления формируют команды наведения РН и отделенных ракет на цели по расчетным траекториям с расчетными скоростями и передают их на РН и отделенные ракеты.
Однако, такой способ не обеспечивает: - подлет ракет к целям вскоре после их выхода из-под воды, т.к. не предусматривает анализ подводной части траекторий целей; - вывод РН на встречный курс.
Указанные недостатки известного способа снижают вероятность уничтожения целей.
Цель изобретения - повышение вероятности уничтожения целей с глубоководным стартом ракетами.
Предложенный способ заключается в том, что:
- в гидроакустической системе обнаруживают и сопровождают подводные цели, определяют текущие координаты и скорости целей, а также их характеристики, и передают их в ОНС;
- в ОНС определяют траектории целей, прогнозируют их продолжение и определяют текущие координаты места и время выхода целей из-под воды, а также текущие координаты места и время выхода РН на встречный курс;
- в ОНС назначают РН, а также станцию управления, и передают данные РН на станцию управления;
- на станции управления запускают РН;
- на РН и отделяемых ракетах определяют их текущие координаты и скорости и передают их через станцию управления в ОНС;
- в ОНС рассчитывают траекторию и скорость полета РН к месту выхода на встречный курс и передают их на станцию управления;
- на станции управления формируют команды наведения РН на место выхода на встречный курс по расчетной траектории с расчетной скоростью и передают их на РН;
- в ОНС после выхода целей из-под воды обнаруживают и сопровождают цели и определяют точные текущие координаты и скорости целей, а также их точные характеристики;
- в ОНС после выхода РН на встречный курс определяют текущие координаты точек прицеливания для отделяемых ракет, а также рассчитывают траектории и скорости полета РН и отделяемых ракет к целям и передают их на станцию управления;
- на станции управления формируют команды отделения ракет от РН в начале расчетных траекторий и передают их на РН;
- на станции управления формируют команды наведения РН и отделенных ракет на цели по расчетным траекториям с расчетными скоростями и передают их на РН и отделенные ракеты.
Гидроакустическая система аналогична известной (iz.ru/news/647107). Цели аналогичны ракете «Скиф» (www.gazeta.ru/army/2021/12/29/14372341.shtml). Координаты и скорости целей определяют в результате обзора области их нахождения с различных направлений, а характеристики целей - в результате их сопровождения. ОНС аналогична известной (RU 2753498). Место и время выхода РН на встречный курс выбирают на оси прогнозируемого продолжения траекторий целей из условия обеспечения РН времени, достаточного для отделения ракет и уничтожения целей вскоре после их выхода из-под воды.
РН, ракеты и станцию управления назначают, исходя из их эффективности. На РН и ракетах, их координаты и скорости определяют с помощью бортовых инерциальных систем навигации, корректируемых с помощью глобальной спутниковой системы навигации.
Траекторию и скорость полета РН к месту выхода на встречный курс рассчитывают из условия обхода РН сторонних объектов и зон действия противоракетной обороны противника. Координаты точек прицеливания для ракет определяют путем выбора наиболее уязвимых мест целей в соответствии с их характеристиками. Траектории и скорости полета РН и ракет к целям рассчитывают из условия столкновения ракет с точками прицеливания под требуемыми углами с требуемыми скоростями. После отделения ракет от РН, перераспределение целей между ними осуществляют путем коррекции их расчетных траекторий и скоростей.
Чем выше скорость ракет, тем выше их инерционность и ниже маневренность. Соотношения скорости и маневренности для ракет на конечных участках траекторий оптимизируют путем задания скоростей, необходимых и достаточных для уничтожения целей при столкновении.
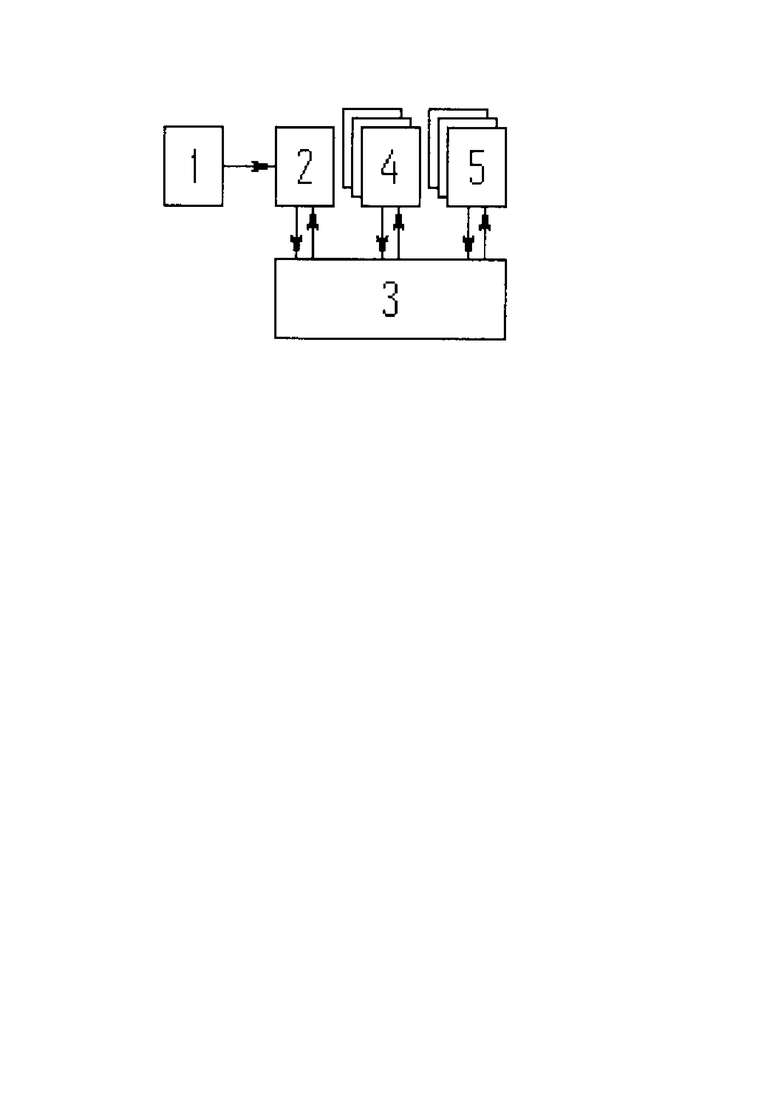
Предложенный способ может быть реализован в системе, блок-схема которой приведена на чертеже. Блоки: 1 - гидроакустическая система; 2 - ОНС; 3 - станция управления; 4 - РН с отделяемыми ракетами; 5 - ракеты, отделенные от РН.
Связи между блоками: 1-2 - текущие координаты и скорости целей, а также их характеристики; 2-3 - данные РН, расчетные траектория и скорость полета РН к месту выхода на встречный курс, а также расчетные траектории и скорости полета РН и отделяемых ракет к целям; 3-2 - текущие координаты и скорости РН и отделяемых ракет; 3-4 - команды наведения РН на место выхода на встречный курс по расчетной траектории с расчетной скоростью, команды отделения ракет от РН в начале расчетных траекторий, а также команды наведения РН на цели по расчетной траектории с расчетной скоростью; 3-5 - команды наведения отделенных ракет на цели по расчетным траекториям с расчетными скоростями; 4-3 - текущие координаты и скорости РН и отделяемых ракет; 5-3 - текущие координаты и скорости ракет, отделенных от РН.
Изобретение относится к системам наведения ракет, а именно к оборонительно-наступательным системам. В гидроакустической системе обнаруживают и сопровождают подводные цели, определяют их координаты, скорости и характеристики и передают их в оборонительно-наступательную систему (ОНС), где определяют траектории целей и координаты места и время их выхода из-под воды, а также координаты места и время выхода ракеты-носителя (РН) на встречный курс, назначают РН и передают ее данные на станцию управления, где запускают РН. На РН и ракетах определяют их координаты и скорости и передают их через станцию управления в ОНС, где рассчитывают траекторию и скорость полета РН к месту выхода на встречный курс и передают их на станцию управления, где формируют команды наведения РН и передают их на РН. В ОНС после выхода целей из-под воды обнаруживают и сопровождают цели и определяют их координаты, скорости и характеристики, а после выхода РН на встречный курс определяют координаты точек прицеливания, а также рассчитывают траектории и скорости полета РН и ракет к целям и передают их на станцию управления, где формируют команды отделения ракет от РН и передают их на РН. На станции управления формируют команды наведения РН и отделенных ракет на цели и передают их на РН и отделенные ракеты. Способ обеспечивает повышение вероятности уничтожения целей с глубоководным стартом ракетами. 1 ил.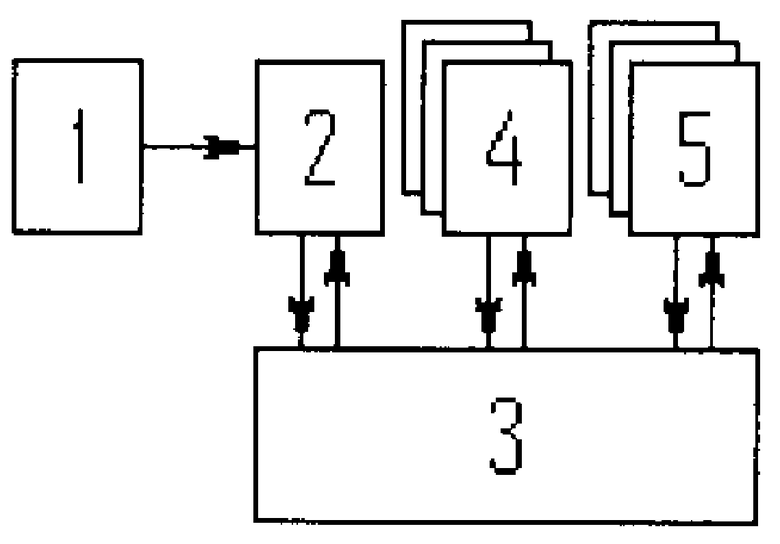
Способ уничтожения целей с глубоководным стартом ракетами, отделяемыми от ракеты-носителя, заключающийся в том, что в оборонительно-наступательной системе (ОНС) назначают ракету-носитель (РН), а также станцию управления и передают данные РН на станцию управления; на станции управления запускают РН; на РН и отделяемых ракетах определяют их текущие координаты и скорости и передают их через станцию управления в ОНС; в ОНС обнаруживают и сопровождают цели и определяют точные текущие координаты и скорости целей, а также их точные характеристики; в ОНС определяют текущие координаты точек прицеливания для отделяемых ракет, а также рассчитывают траектории и скорости полета РН и отделяемых ракет к целям и передают их на станцию управления; на станции управления формируют команды отделения ракет от РН в начале расчетных траекторий и передают их на РН; на станции управления формируют команды наведения РН и отделенных ракет на цели по расчетным траекториям с расчетными скоростями и передают их на РН и отделенные ракеты, отличающийся тем, что в гидроакустической системе обнаруживают и сопровождают подводные цели, определяют текущие координаты и скорости целей, а также их характеристики и передают их в ОНС; в ОНС определяют траектории целей, прогнозируют их продолжение и определяют текущие координаты места и время выхода целей из-под воды, а также текущие координаты места и время выхода РН на встречный курс; в ОНС рассчитывают траекторию и скорость полета РН к месту выхода на встречный курс и передают их на станцию управления; на станции управления формируют команды наведения РН на место выхода на встречный курс по расчетной траектории с расчетной скоростью и передают их на РН; в ОНС точные текущие координаты и скорости целей, а также их точные характеристики определяют после выхода целей из-под воды; в ОНС определение текущих координат точек прицеливания для отделяемых ракет, а также расчет траекторий и скоростей полета РН и отделяемых ракет к целям осуществляют после выхода РН на встречный курс.
| КОМПЛЕКС ТЕХНИЧЕСКИХ СРЕДСТВ ПРОТИВОТОРПЕДНОЙ ЗАЩИТЫ ПОДВОДНОЙ ЛОДКИ | 2021 |
|
RU2770388C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ ПРОТИВОЛОДОЧНОЙ КРЫЛАТОЙ РАКЕТОЙ | 2015 |
|
RU2594314C1 |
| ПРОТИВОЛОДОЧНЫЙ РАКЕТНЫЙ КОМПЛЕКС С АВТОНОМНЫМ РЕАКТИВНЫМ САМОЛЕТОМ-НОСИТЕЛЕМ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2699616C2 |
| КОМПЛЕКС ПРОТИВОЛОДОЧНОГО ВООРУЖЕНИЯ И СПОСОБ ПОРАЖЕНИЯ ПОДВОДНЫХ ЦЕЛЕЙ | 2007 |
|
RU2373487C2 |
| Способ наведения торпеды, управляемой по проводам | 2018 |
|
RU2694792C1 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ | 2017 |
|
RU2692332C2 |

