ОБЛАСТЬ ТЕХНИКИ
[0001] Заявленное техническое решение относится к методам визуального контроля технического состояния элементов ленточного конвейера.
УРОВЕНЬ ТЕХНИКИ
[0002] Во многих отраслях промышленности, например, таких как горнодобывающая, перерабатывающая, энергетическая, химическая, в сфере перевалки грузов и др. используется конвейерный транспорт для транспортировки сыпучих грузов. Транспортировка протяженными магистральными конвейерами может осуществляться на большие расстояния до нескольких десятков километров. Основными подвижными элементами конвейеров являются конвейерные ролики, по которым движется конвейерная лента, несущая транспортируемый материал. Количество роликов на магистральных конвейерах достигает нескольких десятков тысяч. Ролики являются расходным элементом и подлежат периодической замене при выходе из строя. Основная причина выхода роликов из строя это разрушение подшипников, которое в последствии приводит к заклиниванию и остановке ролика.
[0003] Заклинивший не вращающийся ролик является причиной преждевременного износа ленты, может создать аварийную ситуацию и вызвать непредвиденные простои конвейера, что ведет к убыткам и упущенной выгоде предприятия. Основные последствия от заклинившего ролика:
- Стирание обечайки ролика или его разрушение, приводящее к образованию острых краев, которые могут вызвать продольный порез транспортерной ленты, ведущий к ее полному списанию;
- Возгорание ленты от сильно разогревшегося от трения ролика;
- Сход конвейерной ленты и ее повреждение;
- Повышенный износ транспортерной ленты.
[0004] Помимо необходимости контроля подвижных элементов конвейера, необходимо также проводить оперативный контроль технического состояния неподвижных частей конвейера на предмет обнаружения аварийных и аномальных областей трения о движущуюся конвейерную ленту, в частности, в местах контакта транспортерной ленты с неподвижными частями конвейера, например, стальной став конвейера, различные крепежные элементы для установки дополнительного оборудования на конвейере, очистительные или специальные защитные и оградительные элементы конструкции ленточного конвейера, конструктивные элементы загрузочного узла конвейера.
[0005] На настоящий момент инспекция роликов конвейера производится вручную -сотрудник компании обходит весь конвейер и на слух или визуально определяет какой из роликов плохо работает и подлежит замене и делает соответствующие пометки в инспекционной ведомости. Данный процесс требует больших трудозатрат и времени, также такой подход не позволяет оперативно обнаружить элементы конвейера на ранней стадии повреждения, нет четких критериев какой элемент считать поврежденным, а также на качество инспекции влияет человеческий фактор (инспектор может пропустить поврежденный элемент конвейера), отсутствует автоматизация процесса инспектирования.
[0006] В уровне техники известны решения для мониторинга технического состояния технологических объектов, например, такое решение известно из патента RU 2608790 (24.01.2017, ООО «Мобин»). Решение представляет собой программно-аппаратный комплекс, включающий ряд устройств (тепловизор, виброметр, планшет), которые используются для диагностики технического состояния оборудования. Информация, получаемая с помощью такого комплекса, передается для ее анализа в удаленную систему мониторинга.
[0007] Недостатком такого рода решения является его относительная громоздкость, заключающаяся в необходимости использования нескольких устройств, получающих различную информацию о технических характеристиках объекта контроля, отсутствие возможности диагностирования конвейерных роликов, а также отсутствие возможности оперативного получения сведений о конкретном местоположении объекта контроля, в частности, его гео-координат, и формирования отображения объектов, для которых требуется оперативное вмешательство, с помощью технологии дополненной реальности.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0008] Заявленное изобретение позволяет решить техническую проблему в части создания эффективного устройства и принципа его применения для оперативного мониторинга технического состояния элементов ленточного конвейера на основании видео и ИК-контроля и температуры нагрева элементов конвейера.
[0009] Техническим результатом является повышение эффективности контроля технического состояния элементов ленточного конвейера, за счет автоматизации и точного определения нагрева элементов конвейера с помощью применения видео- идентификации в видимом и инфракрасном спектре, формирование изображения инспектируемых объектов с помощью технологии дополненной реальности, а также идентификации расположения элементов с помощью получения гео-координат съемки.
[0010] Заявленный технический результат достигается за счет реализации способа мониторинга технического состояния элементов ленточного конвейера, при этом способ содержит этапы, на которых:
a) выполняют съемку ленточного конвейера с помощью сканирующего устройства, содержащего по меньшей мере две камеры, при этом первая камера обеспечивает захват видеоизображения в видимом спектре, а вторая камера обеспечивает получение термограмм за счет съемки в инфракрасном (ИК) спектре;
b) выполняют обработку полученных изображений в процессе съемки с помощью по меньшей мере одного вычислительного алгоритма, записанного в памяти сканирующего устройства и обеспечивающего формирование в реальном времени процесса отображения дополненной реальности за счет наложения термограмм или подсвеченных областей с температурой выше пороговой Тпор., полученных с помощью второй камеры, поверх изображений, полученных первой камерой;
c) определяют в ходе обработки изображений на этапе b) элемент конвейера, представляющий собой по меньшей мере один ролик или место контакта неподвижных элементов конвейера с транспортерной лентой, термограмма которого содержит значение температуры, превышающее пороговое значение Тпор.;
d) формируют пакет данных, содержащий: изображение выявленного элемента конвейера в видимом спектре, термограмма которого содержит значение температуры, превышающее пороговое значение Тпор., с наложенной термограммой или подсвеченной областью, где температура выше порогового значения Тпор., максимальную и минимальную температуры, географические координаты точки съемки, дату и время;
e) сохраняют сформированный пакет данных на сканирующем устройстве и передают упомянутый пакет данных в удаленную систему управления.
[0011] В одном из частных примером реализации способа сканирующее устройство выполняется в виде единого устройства.
[0012] В другом частном примере реализации способа сканирующее устройство является модульным и выполнено в виде модуля с камерами, подключенного к компьютеру, смартфону, или планшету.
[0013] В другом частном примере реализации способа подключение осуществляется через последовательный или цифровой интерфейс подключения.
[0014] В другом частном примере реализации способа подключение осуществляется посредством беспроводной связи.
[0015] В другом частном примере реализации способа сканирующее устройство перемещается посредством платформы или зафиксировано на беспилотном летальном аппарате (БПЛА).
[0016] В другом частном примере реализации способа платформа является дистанционно управляемой платформой или роботизированной самоходной платформой.
[0017] В другом частном примере реализации способа вычислительный алгоритм представляет собой модель машинного обучения, обеспечивающую распознавание объектов в видеопотоке с использованием нейронных сетей.
[0018] В другом частном примере реализации способа модель машинного обучения формирует ограничивающие рамки, обрамляющие изображения элементов ленточного конвейера, термограмма которых содержит значение температуры, превышающее заданное пороговое значение Тпор.
[0019] В другом частном примере реализации способа ограничивающие рамки содержат по меньшей мере одно из: наименование обрамляемого (распознанного) объекта, максимальная температура в области ограничивающей рамки, степень повреждения в зависимости от величины превышения максимальной температуры в области ограничивающей рамки над пороговой температурой Тпор.
[0020] В другом частном примере реализации способа сканирующее устройство содержит микрофон, с помощью которого выполняется захват акустических данных работы элементов конвейера.
[0021] В другом частном примере реализации способа аудио запись добавляется в пакет данных, отправляемый в удаленную систему управления.
[0022] В другом частном примере реализации способа акустические данные обрабатываются дополнительной моделью машинного обучения, записанной в памяти сканирующего устройства и выполненной с возможностью выявления отклонений технического состояния элементов конвейера на основании получаемых акустических данных.
[0023] В другом частном примере реализации способа отклонение фиксируется с помощью анализа звуковой дорожки путем ее сравнения с эталонной звуковой дорожкой.
[0024] В другом частном примере реализации способа данные акустического анализа добавляются в пакет данных, отправляемый в удаленную систему управления.
[0025] В другом частном примере реализации способа отправка пакета данных в удаленную систему управления осуществляется по беспроводному или проводному каналу передачи данных.
[0026] В другом частном примере реализации способа на основании акустических данных определяется область наличия элементов конвейера с отклонениями в части их технического состояния.
[0027] В другом частном примере реализации способа пакет данных формируется автоматически в момент фиксации камерой элементов конвейера с температурой выше Тпор..
[0028] В другом частном примере реализации способа пороговое значение температуры Тпор. задается как температура, получаемая добавлением заданного значения температурного превышения Δтемп. к минимальной температуре Тмин.
[0029] В другом частном примере реализации способа Тмин. определяется как минимальная температура на термограмме или задается рваной температуре окружающей среды.
[0030] В другом частном примере реализации способа в формируемый пакет данных добавляется информация об элементе ленточного конвейера, выбираемая из группы: расположение на ленточном конвейере, описание элемента, характеристики элемента.
[0031] Заявленный технический результат также достигается за счет устройства мониторинга технического состояния элементов ленточного конвейера, которое содержит
по меньшей мере один процессор;
по меньшей мере одну память, связанную с процессором;
по меньшей мере две камеры, при этом первая камера обеспечивает захват видеоизображения в видимом спектре, а вторая камера обеспечивает получение термограмм за счет съемки в ИК спектре
при этом с помощью процессора
выполняют обработку полученных изображений в процессе съемки с помощью по меньшей мере одного вычислительного алгоритма, записанного в памяти сканирующего устройства и обеспечивающего формирование в реальном времени процесса отображения дополненной реальности за счет наложения термограмм или подсвеченных областей с температурой выше пороговой Тпор., полученных с помощью второй камеры, поверх изображений, полученных первой камерой;
определяют в ходе обработки изображений на этапе b) элемент конвейера, представляющий собой по меньшей мере один ролик или место контакта неподвижных элементов конвейера с транспортерной лентой, термограмма которого содержит значение температуры, превышающее пороговое значение Тпор.;
формируют пакет данных, содержащий: изображение выявленного элемента конвейера в видимом спектре, термограмма которого содержит значение температуры, превышающее пороговое значение Тпор., с наложенной термограммой или подсвеченной областью, где температура выше порогового значения Тпор., максимальную и минимальную температуры, географические координаты точки съемки, дату и время;
сохраняют сформированный пакет данных на сканирующем устройстве и передают упомянутый пакет данных в удаленную систему управления.
[0032] В одном из частных примеров реализации устройство представляет собой единое устройство.
[0033] В другом частном примере реализации устройство является модульным и выполнено в виде модуля с камерами, подключенного к компьютеру, смартфону, или планшету.
[0034] В другом частном примере реализации подключение устройства осуществляется через последовательный или цифровой интерфейс подключения.
[0035] В другом частном примере реализации подключение осуществляется посредством беспроводной связи.
[0036] В другом частном примере реализации вычислительный алгоритм представляет собой модель машинного обучения, обеспечивающую распознавания объектов в видеопотоке с использованием нейронных сетей.
[0037] В другом частном примере реализации модель машинного обучения формирует ограничивающие рамки, обрамляющие изображения элементов ленточного конвейера термограмма которых содержит значение температуры, превышающее заданное пороговое значение Тпор.
[0038] В другом частном примере реализации ограничивающие рамки содержат по меньшей мере одно из: наименование обрамляемого (распознанного) объекта, максимальная температура в области ограничивающей рамки, степень повреждения в зависимости от величины превышения максимальной температуры в области ограничивающей рамки над пороговой температурой Тпор.
[0039] В другом частном примере реализации сканирующее устройство содержит микрофон, с помощью которого выполняется захват акустических данных работы элементов конвейера.
[0040] В другом частном примере реализации аудио запись добавляется в пакет данных, отправляемый в удаленную систему управления.
[0041] В другом частном примере реализации акустические данные обрабатываются дополнительной моделью машинного обучения, записанной в памяти сканирующего устройства и выполненной с возможностью выявления отклонений технического состояния элементов конвейера на основании получаемых акустических данных.
[0042] В другом частном примере реализации отклонение фиксируется с помощью анализа звуковой дорожки путем ее сравнения с эталонной звуковой дорожкой.
[0043] В другом частном примере реализации данные акустического анализа добавляются в пакет данных, отправляемый в удаленную систему управления.
[0044] В другом частном примере реализации отправка пакета данных в удаленную систему управления осуществляется по беспроводному или проводному каналу передачи данных.
[0045] В другом частном примере реализации на основании акустических данных определяется область наличия элементов конвейера с отклонениями в части их технического состояния.
[0046] В другом частном примере реализации пакет данных формируется автоматически в момент фиксации камерой элементов конвейера с температурой выше Тпор.
[0047] В другом частном примере реализации пороговое значение температуры Тпор. задается как температура, получаемая добавлением заданного значения температурного превышения Δтемп. к минимальной температуре Тмин.
[0048] В другом частном примере реализации Тмин, определяется как минимальная температура на термограмме или задается равной температуре окружающей среды.
[0049] В другом частном примере реализации в формируемый пакет данных добавляется информация об элементе ленточного конвейера, выбираемая из группы: расположение на ленточном конвейере, описание элемента, характеристики элемента.
[0050] В другом частном примере реализации устройство перемещается посредством платформы или зафиксировано на беспилотном летальном аппарате (БПЛА).
[0051] В другом частном примере реализации платформа является дистанционно управляемой платформой или роботизированной самоходной платформой.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
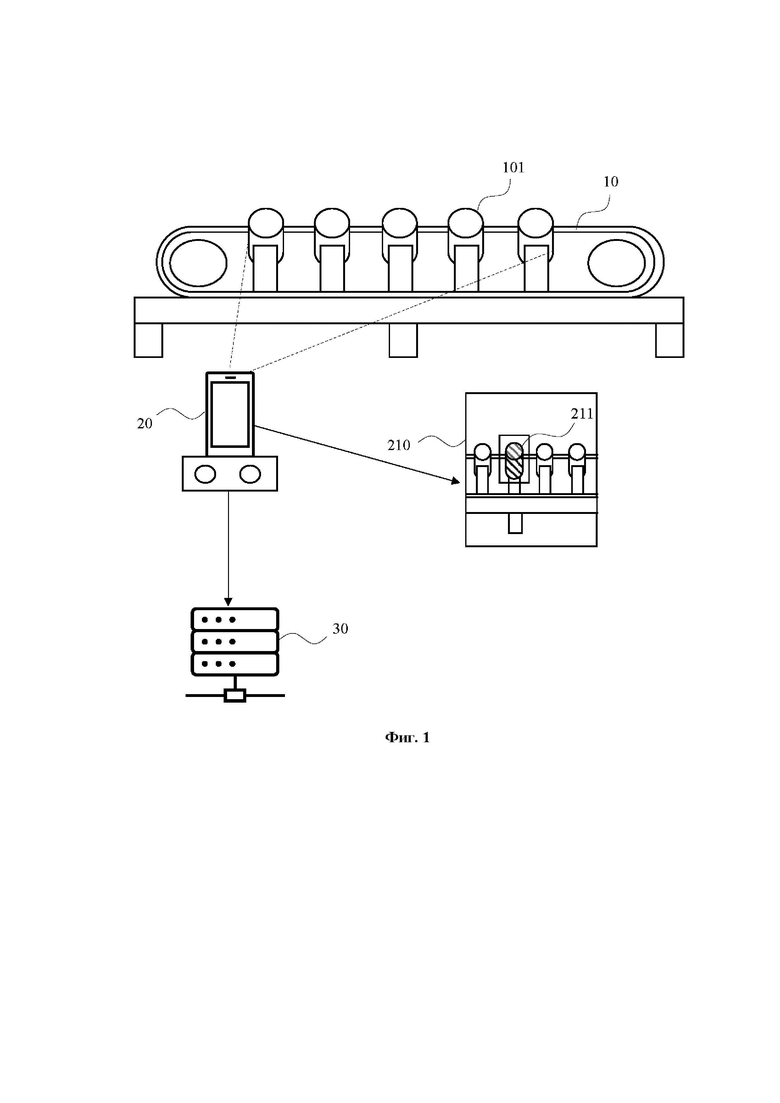
[0052] Фиг. 1 иллюстрирует общую схему работы сканирующего устройства при мониторинге ленточного конвейера.
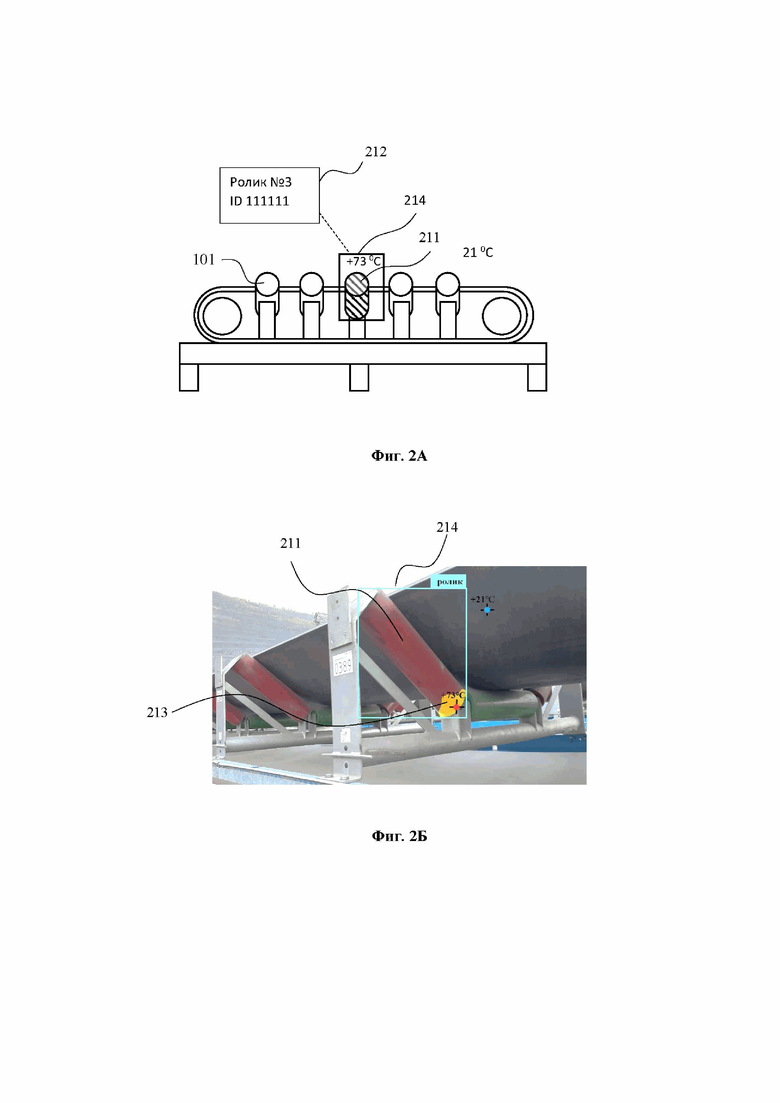
[0053] Фиг. 2А-2Б иллюстрирует пример формирования информации в дополненной реальности.
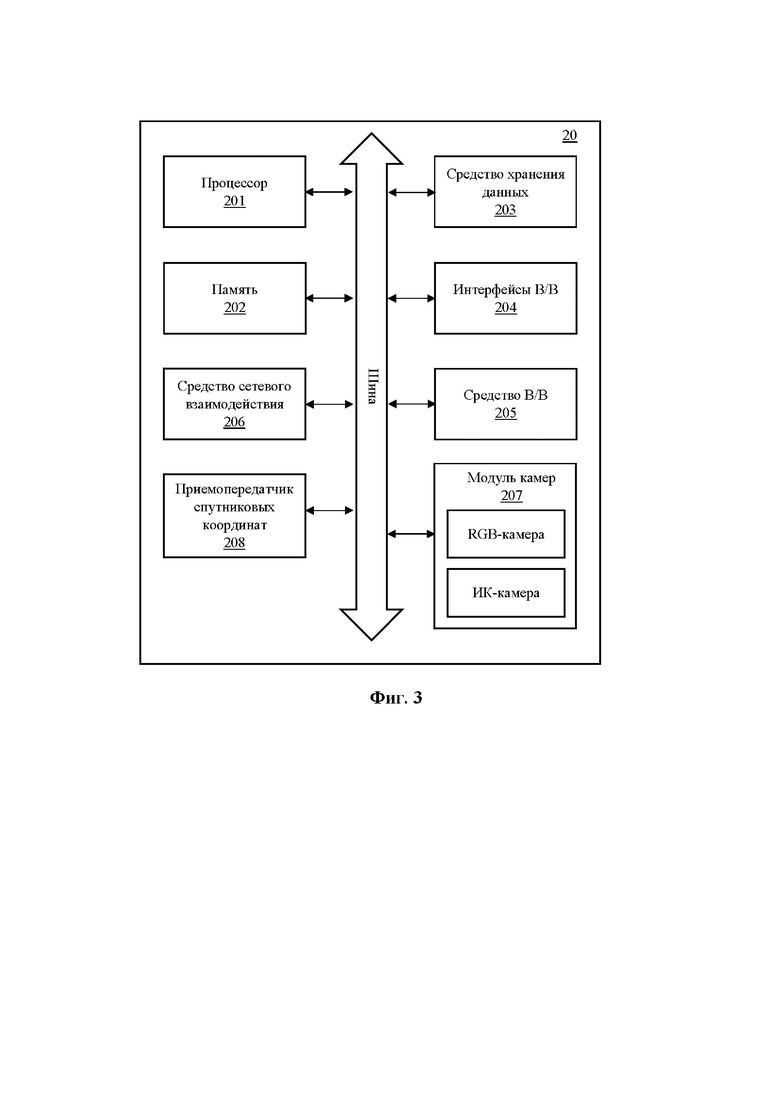
[0054] Фиг. 3 иллюстрирует принципиальную схему сканирующего устройства.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0055] На Фиг. 1 представлена общая схема работы заявленного решения, которое представляет собой контроль за техническим состоянием конвейера (10) с помощью сканирующего устройства (20). Устройство (20) выполняет съемку элементов конвейера (10), в частности его подвижных элементов (101) - роликов, и неподвижных элементов конвейера, которые могут иметь аварийный или аномальный контакт с транспортерной лентой, например, стальной став конвейера, различные крепежные элементы для установки дополнительного оборудования на конвейере, очистительные или специальные защитные и оградительные элементы конструкции ленточного конвейера, конструктивные элементы загрузочного узла конвейера.
[0056] С помощью сканирующего устройства (20) происходит захват изображения одновременно двумя типами камер: камерой, получающей изображение в видимом спектре (RGB-камера) и в ИК спектре (ИК-камера), что позволяет получать изображение (210) зоны контроля, которое формируется наложением термограммы или выделением подсвеченной области (213) с температурой выше пороговой Тпор. на изображение в видимом спектре элемента конвейера (211), для которого превышено установленное температурное значение Тпор., свидетельствующее о технической неисправности данной детали. Применение модели машинного обучения позволяет вокруг распознанного элемента конвейера (211) сформировать ограничивающую рамку (214) с названием этого элемента, которая обрамляет изображение неисправного элемента ленточного конвейера с температурой превышающей заданное пороговое значение Тпор. Пороговое значение температуры Тпор. задается как температура, получаемая добавлением заданного значения температурного превышения Δтемп. к минимальной температуре Тмин., которая определяется, как минимальная температура на термограмме или задается рваной температуре окружающей среды.
[0057] Изображения, получаемые в ходе анализа элементов конвейера, обрабатываются вычислительным алгоритмом устройства (20), который выполняет определение объектов, температура которых превышает допустимое пороговое значение Тпор., и выделяет эти объекты, формируя отображение неисправных элементов с помощью технологии дополненной реальности, как это представлено на Фиг. 2А - Фиг. 2Б. На получаемых изображениях в момент сканирования устройством (20) при определении с помощью ИК камеры превышения температурного порога, термограмма или подсвеченная область (213) с температурой выше пороговой Тпор таких объектов накладывается на изображение видимого спектра. Дополнительно может определяться контур распознаваемого объекта с отображением на изображении видимого спектра.
[0058] В области отображения данных об объекте контроля (211), определенного в ходе сканирования, может также добавляться информация о его текущей температуре (в частном варианте может также фиксироваться максимально возможная температура), информация о минимальной температуре области контроля (например, температура окружающей среды), обрамляющая объект ограничивающая рамка с его названием (214), подсвеченная область с температурой выше пороговой Тпор (213) и географические координаты места съемки, что позволяет оперативно определить где находится поврежденный элемент (211) конвейера (10), требующий ремонта или замены.
[0059] В качестве алгоритма для определения объектов контроля конвейера при движении устройства (20) могут использоваться как модели анализа термограмм, так и применяться модели машинного обучения (например, искусственных нейронных сетей), натренированные на распознавание конкретных элементов конвейера (10) на основании их изображений в видимом спектре. В качестве одного из примеров такого алгоритма может использоваться подход при распознавании объектов с формированием ограничивающих прямоугольников (англ. Bounding box) или их контуров. Пример такого подхода раскрыт в работе Object Detection using YOLOv5 and OpenCV DNN in С++ and Python (Kukil 2022 // https://learnopencv.com/object-detection-using-yolov5-and-opencv-dnn-in-c-and-python/), a также в статье «Сегментация изображений с помощью U-net (UNET) на Keras» (Fedorov А. 2020 // https://www.bizkit.ru/2020/01/09/16203/). Данный пример не является ограничивающим и лишь приведен как частный случай применения технологий распознавания и сегментации образов и объектов.
[0060] Для определения степени поврежденности элементов конвейера (10) может устанавливаться одно или несколько заданных значений превышения Птемп. максимальной температуры над пороговой температурой Тпор., что также распознается алгоритмом обработки термограмм при сканировании.
[0061] Заданные значения превышения Птемп максимальной температуры над пороговой температуры Тпор. используется для определения степени поврежденности (аварийности) элемента конвейера, например, для конвейерного ролика при Тпор. = +20°С значение превышения над пороговой температурой может быть задано равным 30°С (Птемп = 30°С) и, если максимальная температура ролика выше Тпор. = +20°С, но менее +50°С = Тпор.+Птемп. то это обозначает плохое состояние ролика (замена необходима в период ППР - планово-предупредительные работы), а если максимальная температура ролика выше +50°С = Тпор.+Птемп. то это обозначает аварийное состояние ролика (необходима срочная замена).
[0062] Полученные данные в ходе сканирования устройством (20) сохраняются в его памяти и формируют пакет данных для отправки в удаленную систему контроля (30), размещенную на сервере или ином вычислительном устройстве. Пакет данных включает в себя изображение выявленного элемента конвейера, термограмма которого содержит значение температуры, превышающее пороговое значение Тпор., с наложенной термограммой или подсвеченной областью, где температура выше порогового значения Тпор., максимальную и минимальную температуры, географические координаты точки съемки, дату и время. Пакет данных формируется только при выявлении объекта контроля, максимальная температура которого выше заданной пороговой температуры Тпор.. Данные передаются по проводному или беспроводному каналу передачи данных, в зависимости от архитектуры сети связи на объекте контроля.
[0063] Переданный пакет данных обрабатывается специальной программой в удаленной системе управления с целью планирования сервисных работ. Удаленная система управления для обработки переданного пакета данных может использовать возможности специализированных отраслевых решений, например, таких как, ЕАМ (Enterprise Asset Management - управление основными фондами предприятия), АРМ (Asset Performance Management - управление эффективностью активов), ERP (Enterprise Resource Planning - планирование ресурсов предприятия) и подобных для цифровизации процессов технического обслуживания и ремонта (ТОиР) и планово-предупредительного ремонта (ППР) оборудования и других материальных активов предприятия.
[0064] По факту получения пакета данных в системе управления (30) может формировать наряд на ремонт и/или замену вышедшего из строя элемента конвейера (101), а также может формироваться сигнал для остановки конвейера в случае возможности повреждения конвейерной ленты, или выхода из строя критически важного узла.
[0065] Как показано на Фиг. 2 при выявлении элемента конвейера с превышением пороговой температуры дополнительно может происходить идентификация такого элемента (212), например, номер ролика и его ID, степень износа, дата последней замены, прошлые достижения критической температуры и т.п. Идентификация конкретного объекта на конвейере (10) на примере ролика может выполняться с помощью фиксации координат точки съемки и последующим сравнением координат с информацией, хранимой в системе (30), в которой для каждого ролика или иного элемента также происходит сохранение соответствующих данных с привязкой к гео-координатам. Другим примером может также служить формирование цифровой модели конвейера (цифрового двойника) с разметкой элементов контроля и привязкой их гео-координат к соответствующей информации.
[0066] На основании получаемых данных может приниматься решение об оперативной замене элемента (101) и его автоматическом заказе с помощью формирования соответствующей информации с помощью удаленной системы (30) для передачи в другие сервисы контроля.
[0067] На Фиг. 3 представлена принципиальная схема сканирующего устройства. Устройство (20) может выполняться единым или модульным, подключаемым к внешнему устройству (смартфон, компьютер, ноутбук, планшет и т.п.).
[0068] В общем случае устройство (20) содержит такие компоненты, как: один или более процессоров (201), по меньшей мере одну оперативную память (202), средство постоянного хранения данных (203), интерфейсы ввода/вывода (204), средство В/В (205), средства сетевого взаимодействия (206), модуль камер (207) и приемопередатчик спутниковых координат (208).
[0069] Процессор (201) устройства выполняет основные вычислительные операции, необходимые для функционирования устройства (20) или функционала одного или более его компонентов. Процессор (201) исполняет необходимые машиночитаемые команды, содержащиеся в оперативной памяти (202). Под процессором (201) или параллельно с процессором (201) может использоваться графический процессор, осуществляющий соответствующую обработку данных, в том числе в части применения алгоритмов и моделей машинного обучения.
[0070] Память (202), как правило, выполнена в виде ОЗУ и содержит необходимую программную логику, обеспечивающую требуемый функционал. Средство хранения данных (203) может выполняться в виде HDD, SSD дисков, рейд массива, сетевого хранилища, флэш-памяти, оптических накопителей информации (CD, DVD, MD, Blue-Ray дисков) и т.п. Средство (203) позволяет выполнять долгосрочное хранение различного вида информации, например, пакеты данных от сканирования, истории обработки запросов (логов), идентификаторов пользователей, данные камер, изображения и т.п.
[0071] Интерфейсы (204) представляют собой стандартные средства для подключения и работы с вычислительными устройствами. Интерфейсы (204) могут представлять, например, релейные соединения, USB, RS232/422/485 или другие, RJ45, LPT, UART, СОМ, HDMI, PS/2, Lightning, Fire Wire и т.п. для работы, в том числе, по протоколам Modbus и сетям Probfibus. Выбор интерфейсов (204) зависит от конкретного исполнения устройства (20), а также подключаемых сторонних устройств.
[0072] В качестве средств В/В данных (205) может использоваться: клавиатура, джойстик, дисплей (сенсорный дисплей), проектор, тачпад, манипулятор мышь, трекбол, световое перо, динамики, микрофон и т.п.
[0073] Средства сетевого взаимодействия (206) выбираются из устройства, обеспечивающего сетевой прием и передачу данных, например, Ethernet карту, WLAN/Wi-Fi модуль, Bluetooth модуль, BLE модуль, NFC модуль, IrDa, RFID модуль, GSM модем и т.п. С помощью средства (206) обеспечивается организация обмена данными по проводному или беспроводному каналу передачи данных, например, WAN, PAN, ЛВС (LAN), Интранет, Интернет, WLAN, WMAN или GSM, квантовый канал передачи данных, спутниковая связь и т.п. Компоненты устройства (20), как правило, сопряжены посредством общей шины передачи данных.
[0074] Устройство (20) содержит модуль камеры (207), содержащий RGB-камеру, получающую изображения в видимом спектре, и ИК-камеру, обеспечивающую получение термограмм. Обе камеры настроены таким образом, чтобы получать изображения, накладываемые друг на друга, обеспечивая формирование дополненной реальности при съемке конвейера (10).
[0075] Устройство (20) также содержит приемопередатчик спутниковых координат (208), выполненный, например, в виде чипа, позволяющего обмениваться данными по протоколу ГНСС (GPS/ГЛОНАСС/BeiDou и т.п.).
[0076] Как указывалось выше, устройство (20) может представлять собой единое устройство, выполненное в едином корпусе, или выполняться в виде совокупности двух и более устройств. В случае модульного исполнения устройство (20) может содержать отдельный блок с камерами, и может содержать отдельный процессор, отвечающий за графическую обработку данных, получаемых с камер. В данном случае устройство (20), выполненное в виде внешнего модуля, соединяется с внешним вычислительным устройством при помощи беспроводной связи, или интерфейсного сопряжения, например, через последовательный или цифровой интерфейс подключения.
[0077] Устройство (20) может перемещаться вдоль конвейера (10) для съемки при помощи сотрудника, выполняющего обход, либо устанавливаться на устройство для его перемещения, например, роботизированную самоходную или дистанционно управляемую платформу, БПЛА и т.п.
[0078] Помимо съемки модулем камеры (207) и анализа термограмм элементов конвейера (101) может применяться аудиоанализ звуковых дорожек, формируемых при работе конвейера (10). При выполнении съемки устройством (20) конвейера активируется микрофон, записывающий звуки работы конвейера, в частности, характерные звуки работы роликов (101). Получаемые акустические данные сравниваются, например, с помощью модели машинного обучения, обеспечивающий сравнение аудиодорожек, с эталонной аудиодорожкой звукового сигнала работы ролика, и на основании векторной близости выдается суждение о наличии или отсутствии технической неисправности анализируемого элемента, или о той или иной степени отклонения технического состояния анализируемого элемента. Записываемая звуковая дорожка в процессе сканирования, а также результат ее анализа записываются в пакет данных, передаваемый в удаленную систему (30).
[0079] Данный принцип позволяет дополнительно оценить степень критического износа и вероятности выхода из строя элементов конвейера и представляет собой дополнительный параметр, позволяющий повысить точность объективного автоматизированного контроля. Дополнительно, подход в части анализа акустических данных позволяет также выявить область для непосредственного видеоанализа за счет выявления источника звука, свидетельствующего о наличии технических отклонений в работе конвейера.
[0080] В настоящих материалах заявки было представлено предпочтительное раскрытие осуществления заявленного технического решения, которое не должно использоваться как ограничивающее иные, частные воплощения его реализации, которые не выходят за рамки испрашиваемого объема правовой охраны и являются очевидными для специалистов в соответствующей области техники.
Заявленное техническое решение относится к методам визуального контроля технического состояния элементов ленточного конвейера. Способ мониторинга технического состояния элементов ленточного конвейера содержит этапы, на которых: a) выполняют съемку ленточного конвейера с помощью сканирующего устройства, содержащего по меньшей мере две камеры, при этом первая камера обеспечивает захват видеоизображения в видимом спектре, а вторая камера обеспечивает получение термограмм за счет съемки в инфракрасном (ИК) спектре; b) выполняют обработку полученных изображений в процессе съемки с помощью по меньшей мере одного вычислительного алгоритма, записанного в памяти сканирующего устройства и обеспечивающего формирование в реальном времени процесса отображения дополненной реальности за счет наложения термограмм или подсвеченных областей с температурой выше пороговой Тпор., полученных с помощью второй камеры, поверх изображений, полученных первой камерой; c) определяют в ходе обработки изображений на этапе b) элемент конвейера, представляющий собой по меньшей мере один ролик или место контакта неподвижных элементов конвейера с транспортерной лентой, термограмма которого содержит значение температуры, превышающее пороговое значение Тпор.; d) формируют пакет данных, содержащий: изображение выявленного элемента конвейера в видимом спектре, термограмма которого содержит значение температуры, превышающее пороговое значение Тпор., с наложенной термограммой или подсвеченной областью, где температура выше порогового значения Тпор., максимальную и минимальную температуры, географические координаты точки съемки, дату и время; e) сохраняют сформированный пакет данных на сканирующем устройстве и передают упомянутый пакет данных в удаленную систему управления. Технический результат - повышение эффективности контроля технического состояния элементов ленточного конвейера, за счет автоматизации и точного определения нагрева элементов конвейера с помощью применения видео-идентификации в видимом и инфракрасном спектре, формирование изображения инспектируемых объектов с помощью технологии дополненной реальности, а также идентификации расположения элементов с помощью получения гео-координат съемки. 2 н. и 40 з.п. ф-лы, 3 ил.
1. Способ мониторинга технического состояния элементов ленточного конвейера, содержащий этапы, на которых:
a) выполняют съемку ленточного конвейера с помощью сканирующего устройства, содержащего по меньшей мере две камеры, при этом первая камера обеспечивает захват видеоизображения в видимом спектре, а вторая камера обеспечивает получение термограмм за счет съемки в инфракрасном (ИК) спектре;
b) выполняют обработку полученных изображений в процессе съемки с помощью по меньшей мере одного вычислительного алгоритма, записанного в памяти сканирующего устройства и обеспечивающего формирование в реальном времени процесса отображения дополненной реальности за счет наложения термограмм или подсвеченных областей с температурой выше пороговой Tпор., полученных с помощью второй камеры, поверх изображений, полученных первой камерой;
c) определяют в ходе обработки изображений на этапе b) элемент конвейера, представляющий собой по меньшей мере один ролик или место контакта неподвижных элементов конвейера с транспортерной лентой, термограмма которого содержит значение температуры, превышающее пороговое значение Tпор.;
d) формируют пакет данных, содержащий: изображение выявленного элемента конвейера в видимом спектре, термограмма которого содержит значение температуры, превышающее пороговое значение Tпор., с наложенной термограммой или подсвеченной областью, где температура выше порогового значения Tпор., максимальную и минимальную температуры, географические координаты точки съемки, дату и время;
e) сохраняют сформированный пакет данных на сканирующем устройстве и передают упомянутый пакет данных в удаленную систему управления.
2. Способ по п.1, характеризующийся тем, что сканирующее устройство выполняется в виде единого устройства.
3. Способ по п.1, характеризующийся тем, что сканирующее устройство является модульным и выполнено в виде модуля с камерами, подключенного к компьютеру, смартфону, или планшету.
4. Способ по п.3, характеризующийся тем, что подключение осуществляется через последовательный или цифровой интерфейс подключения.
5. Способ по п.3, характеризующийся тем, что подключение осуществляется посредством беспроводной связи.
6. Способ по п.1, характеризующийся тем, что сканирующее устройство перемещается посредством платформы или зафиксировано на беспилотном летальном аппарате (БПЛА).
7. Способ по п.6, характеризующийся тем, что платформа является дистанционно управляемой платформой или роботизированной самоходной платформой.
8. Способ по п.1, характеризующийся тем, что вычислительный алгоритм представляет собой модель машинного обучения, обеспечивающую распознавание объектов в видеопотоке с использованием нейронных сетей.
9. Способ по п.8, характеризующийся тем, что модель машинного обучения формирует ограничивающие рамки, обрамляющие изображения элементов ленточного конвейера, термограмма которых содержит значение температуры, превышающее заданное пороговое значение Tпор.
10. Способ по п.9, характеризующийся тем, что ограничивающие рамки содержат по меньшей мере одно из: наименование обрамляемого (распознанного) объекта, максимальная температура в области ограничивающей рамки, степень повреждения в зависимости от величины превышения максимальной температуры в области ограничивающей рамки над пороговой температурой Tпор.
11. Способ по п.1, характеризующийся тем, что сканирующее устройство содержит микрофон, с помощью которого выполняется захват акустических данных работы элементов конвейера.
12. Способ по п.11, характеризующийся тем, что аудио запись добавляется в пакет данных, отправляемый в удаленную систему управления.
13. Способ по п.11, характеризующийся тем, что акустические данные обрабатываются дополнительной моделью машинного обучения, записанной в памяти сканирующего устройства и выполненной с возможностью выявления отклонений технического состояния элементов конвейера на основании получаемых акустических данных.
14. Способ по п.13, характеризующийся тем, что отклонение фиксируется с помощью анализа звуковой дорожки путем ее сравнения с эталонной звуковой дорожкой.
15. Способ по п.13, характеризующийся тем, что данные акустического анализа добавляются в пакет данных, отправляемый в удаленную систему управления.
16. Способ по п.1, характеризующийся тем, что отправка пакета данных в удаленную систему управления осуществляется по беспроводному или проводному каналу передачи данных.
17. Способ по п.13, характеризующийся тем, что на основании акустических данных определяется область наличия элементов конвейера с отклонениями в части их технического состояния.
18. Способ по п.1, характеризующийся тем, что пакет данных формируется автоматически в момент фиксации камерой элементов конвейера с температурой выше Tпор.
19. Способ по п.1, характеризующийся тем, что пороговое значение температуры Tпор. задается как температура, получаемая добавлением заданного значения температурного превышения Δтемп.к минимальной температуре Tмин.
20. Способ по п.19, характеризующийся тем, что Tмин. определяется как минимальная температура на термограмме или задается равной температуре окружающей среды.
21. Способ по п.1, характеризующийся тем, что в формируемый пакет данных добавляется информация об элементе ленточного конвейера, выбираемая из группы: расположение на ленточном конвейере, описание элемента, характеристики элемента.
22. Устройство мониторинга технического состояния элементов ленточного конвейера, содержащее
по меньшей мере один процессор;
по меньшей мере одну память, связанную с процессором;
по меньшей мере две камеры, при этом первая камера обеспечивает захват видеоизображения в видимом спектре, а вторая камера обеспечивает получение термограмм за счет съемки в ИК спектре;
при этом с помощью процессора
выполняют обработку полученных изображений в процессе съемки с помощью по меньшей мере одного вычислительного алгоритма, записанного в памяти сканирующего устройства и обеспечивающего формирование в реальном времени процесса отображения дополненной реальности за счет наложения термограмм или подсвеченных областей с температурой выше пороговой Tпор., полученных с помощью второй камеры, поверх изображений, полученных первой камерой;
определяют в ходе обработки изображений элемент конвейера, представляющий собой по меньшей мере один ролик или место контакта неподвижных элементов конвейера с транспортерной лентой, термограмма которого содержит значение температуры, превышающее пороговое значение Tпор.;
формируют пакет данных, содержащий: изображение выявленного элемента конвейера в видимом спектре, термограмма которого содержит значение температуры, превышающее пороговое значение Tпор., с наложенной термограммой или подсвеченной областью, где температура выше порогового значения Tпор., максимальную и минимальную температуры, географические координаты точки съемки, дату и время;
сохраняют сформированный пакет данных на сканирующем устройстве и передают упомянутый пакет данных в удаленную систему управления.
23. Устройство по п.22, характеризующееся тем, что выполняется в виде единого устройства.
24. Устройство по п.22, характеризующееся тем, что является модульным и выполнено в виде модуля с камерами, подключенного к компьютеру, смартфону или планшету.
25. Устройство по п.24, характеризующееся тем, что подключение осуществляется через последовательный или цифровой интерфейс подключения.
26. Устройство по п.24, характеризующееся тем, что подключение осуществляется посредством беспроводной связи.
27. Устройство по п.24, характеризующееся тем, что вычислительный алгоритм представляет собой модель машинного обучения, обеспечивающую распознавание объектов в видеопотоке с использованием нейронных сетей.
28. Устройство по п.24, характеризующееся тем, что модель машинного обучения формирует ограничивающие рамки, обрамляющие изображения элементов ленточного конвейера, термограмма которых содержит значение температуры, превышающее заданное пороговое значение Tпор.
29. Устройство по п.28, характеризующееся тем, что ограничивающие рамки содержат по меньшей мере одно из: наименование обрамляемого (распознанного) объекта, максимальная температура в области ограничивающей рамки, степень повреждения в зависимости от величины превышения максимальной температуры в области ограничивающей рамки над пороговой температурой Tпор.
30. Устройство по п.24, характеризующееся тем, что сканирующее устройство содержит микрофон, с помощью которого выполняется захват акустических данных работы элементов конвейера.
31. Устройство по п.30, характеризующееся тем, что аудио запись добавляется в пакет данных, отправляемый в удаленную систему управления.
32. Устройство по п.30, характеризующееся тем, что акустические данные обрабатываются дополнительной моделью машинного обучения, записанной в памяти сканирующего устройства и выполненной с возможностью выявления отклонений технического состояния элементов конвейера на основании получаемых акустических данных.
33. Устройство по п.32, характеризующееся тем, что отклонение фиксируется с помощью анализа звуковой дорожки путем ее сравнения с эталонной звуковой дорожкой.
34. Устройство по п.33, характеризующееся тем, что данные акустического анализа добавляются в пакет данных, отправляемый в удаленную систему управления.
35. Устройство по п.24, характеризующееся тем, что отправка пакета данных в удаленную систему управления осуществляется по беспроводному или проводному каналу передачи данных.
36. Устройство по п.32, характеризующееся тем, что на основании акустических данных определяется область наличия элементов конвейера с отклонениями в части их технического состояния.
37. Устройство по п.24, характеризующееся тем, что пакет данных формируется автоматически в момент фиксации камерой элементов конвейера с температурой выше Tпор.
38. Устройство по п.24, характеризующееся тем, что пороговое значение температуры Tпор. задается как температура, получаемая добавлением заданного значения температурного превышения Δтемп.к минимальной температуре Tмин.
39. Устройство по п.38, характеризующееся тем, что Tмин. определяется как минимальная температура на термограмме или задается равной температуре окружающей среды.
40. Устройство по п.24, характеризующееся тем, что в формируемый пакет данных добавляется информация об элементе ленточного конвейера, выбираемая из группы: расположение на ленточном конвейере, описание элемента, характеристики элемента.
41. Устройство по п.24, характеризующееся тем, что сканирующее устройство перемещается посредством платформы или зафиксировано на беспилотном летальном аппарате (БПЛА).
42. Устройство по п.41, характеризующееся тем, что платформа является дистанционно управляемой платформой или роботизированной самоходной платформой.
| WO 2015009467 A1, 22.01.2015 | |||
| US 2022020137 A1, 20.01.2022 | |||
| US 2019135552 A1, 09.05.2019 | |||
| CN 111634638 A, 08.09.2020 | |||
| CN 207726224 U, 14.08.2018 | |||
| СПОСОБ И СИСТЕМА АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ПОВРЕЖДЕНИЙ КОНВЕЙЕРНОЙ ЛЕНТЫ | 2021 |
|
RU2766476C1 |

