Изобретение относится к области радионавигации и позволяет осуществить реализацию помехоустойчивой дальномерной радионавигационной системы, обеспечивающей высокоточное позиционирование.
В настоящее время известны глобальные навигационные спутниковые системы (ГНСС) такие, как ГЛОНАСС, GPS, Galileo, Beidou имеют ряд неоспоримых преимуществ, таких как:
- полное покрытие земли и околоземного пространства;
- бесплатное использование систем;
- унификация оборудования для всех пользователей и т.д.
Но ГНСС имеют и ряд существенных недостатков:
- плохой прием сигналов в лесистых и горных местностях, в условиях городской застройки;
- недостаточная помехоустойчивость - локальные помехи небольшой мощности могут затруднить или сделать невозможным навигацию по сигналам ГНСС.
Инерциальные системы (ИНС) самостоятельно не могут решить проблему навигации в этих условиях, так как им необходима постоянная коррекция с использованием ГНСС.
Локальные системы навигации (ЛСН) дополняют системы ГНСС в случаях невозможности использования последних из-за мощных поставленных помех или отсутствия сигнала ГНСС в точке приема.
Из уровня техники известна наземная импульсно-фазовая радионавигационная система (ИФРНС) «Чайка» (Loran) [1]. Система работает на сверхдлинных волнах, включает в себя мощные передатчики (мощность более 200 кВт) и работает на расстояниях более 1000 км. Недостатком системы является низкая точность позиционирования (десятки метров).
Известна локальная радионавигационная система «Крабик» [2]. В системе используется дальномерный, разностно-дальномерный и комбинированный метод позиционирования. Используется фазовый метод измерения псевдодальности, позволяющий выполнить точные измерения на основании измерения фазы несущей частоты.
Недостатками РНС «Крабик» являются:
- низкая устойчивость к маскирующим помехам, так как фаза сигнала в высокой степени подвержена воздействию таких помех;
- низкая устойчивость к имитационным помехам, так как в системе не предусмотрено изменение кода сигнала в процессе работы, при этом имеется высокая вероятность имитации известного кода сигнала;
возможность любого несанкционированного пользователя, имеющего соответствующий навигационный приемник, использовать данную систему для навигации.
Известна, также, локальная радионавигационная система компании ООО «ВедаПроект», представляющая собой наземное дополнение к системе ГЛОНАСС на основе псевдоспутников (ПС) [3]. Локальная радионавигационная система (ЛРНС) предназначена для обеспечения высокоточной навигации в условиях затруднения приема сигналов ГНСС GPS/ГЛОНАСС. В системе может использоваться стандартный навигационный приемник ГНСС, с минимальными программными модификациями, но с внешним конвертором, позволяющим менять диапазон используемых несущих частот.
Недостатками ЛРНС на основе ПС компании ООО «ВедаПроект» являются:
- низкая электромагнитная совместимость со стандартным оборудованием ГНСС;
- низкая устойчивость к имитационным помехам, так как в системе используются известные коды сигналов ГНСС, при этом имеется высокая вероятность имитации известного кода сигнала;
- возможность любого несанкционированного пользователя, имеющего соответствующий навигационный приемник, использовать данную систему для навигации.
Известна локальная система навигации LocataNet [4]. Навигационная система Locata представляет собой наземную сеть передатчиков, которые передают в эфир навигационные радиосигналы, в целом очень похожие на принципы работы радиосигналов спутниковых навигационных систем. Навигационный приемник, способный принимать и обрабатывать сигналы передатчиков системы Locata, способен самостоятельно осуществлять навигацию, в целом очень похожую на навигацию (позиционирование) по радиосигналам спутниковых навигационных систем.
Отличительной особенностью системы Locata от аналогичных систем спутниковой навигации является временное разделение каналов (временное разделение радиосигналов передатчиков); изменение в процессе работы временного расположения сигнала передатчика; отличающаяся информация навигационного сообщения в каждом передатчике; произвольные допустимые рабочие частоты подсетей; отличающаяся система синхронизации передатчиков подсети и групп подсетей.
Недостатками системы Locata являются:
- возможность любого (несанкционированного, неавторизованного) пользователя, имеющего соответствующий навигационный приемник, использовать данную систему для навигации;
- отсутствие взаимодействия (помимо сигналов передатчиков) между навигационной системой и навигационными приемниками, в частности, затрудняющее изменение сигналов передатчиков в процессе ее работы и изменения структуры и режима работы навигационной системы;
- точность позиционирования и синхронизации в системе Locata обеспечивается точным измерением фазы несущей в системе. Но фаза несущей прежде всего сбивается под действием помех;
- низкая помехоустойчивость, так как всем известен сигнал, используемый в системе.
Наиболее близким аналогом описываемого изобретения в настоящем патенте является локальная система навигации, описанная в патенте 2555860 (RU) [5].
Навигационная система описанная в данном патенте 2555860 (RU) состоит из нескольких передатчиков, передающих радионавигационные сигналы, с помощью которых навигационный приемник, способный обрабатывать эти сигналы, в состоянии осуществить навигацию - определить свои координаты и, по возможности, другие свои характеристики, например, скорость, вектор движения и т.д. Навигационная система может содержать подсистему управления, необходимую для управления работой передатчиков и/или для взаимодействия с навигационными приемниками. Местоположение может использоваться в навигационном приемнике или пересылаться им в подсистему управления, или подсистема управления может получать его от системы связи.
Недостатками предложенной системы являются следующие моменты:
- используются отдельно приемники в абонентских терминалах и передатчики в опорных станциях, то есть реализуется только беззапросный режим, при котором необходима точная синхронизация передатчиков опорных станций тем или иным способом;
-при этом в системе невозможно реализовать запросный режим решения навигационной задачи, который в ряде применений является единственно возможным в случаях, когда отсутствует синхронизированная сеть опорных станций;
- способ синхронизации передатчиков отдельно не приводится, это значит, что для синхронизации передатчиков используется такой же метод как в системе Locata на основе измерения фазы несущей, которая подвержена воздействию помех в первую очередь;
- не приводится способ обеспечения высокоточной навигации.
Сущность изобретения
Цель изобретения, описанного в настоящем патенте, является создание навигационной системы с отсутствием указанных недостатков наиболее близкого аналога, характеризующейся следующими критериями:
- радионавигационная система обеспечивает высокоточное позиционирование с использованием навигационного сигнала свободного от воздействия ионосферы, тропосферы и погрешности определения эфемерид спутников;
- содержит приемопередатчики на опорных станциях и абонентских терминалах, решает как задачу позиционирования, так и задачу мониторинга объектов;
- использует запросный режим и дальномерный метод позиционирования;
- обеспечивает повышенную точность позиционирования с использованием помехоустойчивого оригинального метода корреляционной обработки кода сигнала;
- обеспечивает устойчивость к сгенерированным имитационным помехам (100%) с использованием большого числа псевдослучайных последовательностей (ПСП), динамически меняющихся по сложному закону;
- обеспечивает устойчивость к ретранслированным имитационным помехам с использованием методов борьбы с переотраженными сигналами;
- устойчивость к маскирующим помехам обеспечивается мощностью сигнала в точке приема в 10000 раз превышающей мощность сигнала ГНСС и использованием шумоподобных сигналов, для которых подавление помехи на выходе согласованного фильтра по мощности составляет 2 В раз, где В-база сигнала.
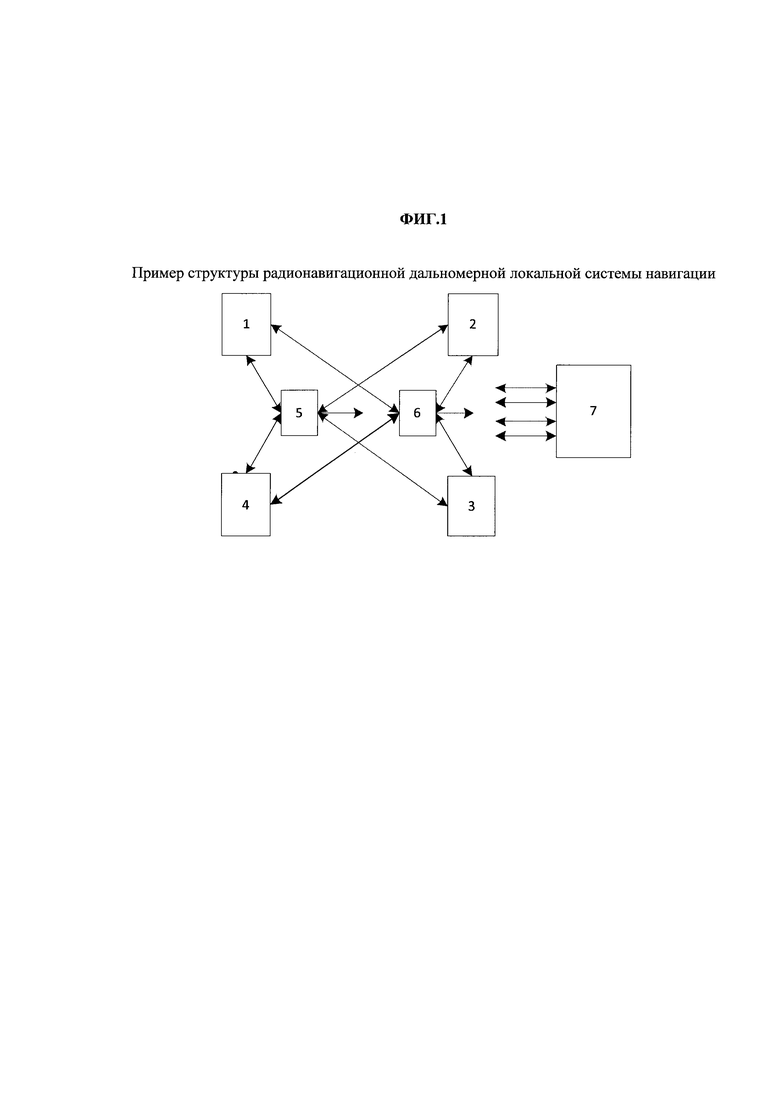
Пример структуры радионавигационной дальномерной локальной системы навигации приведен на ФИГ. 1.
Радионавигационная система представляет собой локальную систему навигации, состоящую из сети приемо-передатчиков, входящих в состав радионавигационных опорных станций (1, 2, 3, 4), приемо-передатчиков, входящих в состав абонентских терминалов (5, 6) и аппаратно-программного комплекса (7).
В системе решаются две задачи: мониторинга и навигации объектов.
Обеспечиваются запросный режим работы и дальномерный метода определения координат.
Техническим результатом заявляемого изобретения является обеспечение высокоточного позиционирования абонентов в запросном режиме с использованием дальномерного метода позиционирования, обеспечивающего сантиметровую точность позиционирования с использованием помехоустойчивого способа корреляционной обработки шумоподобных сигналов и высокую устойчивость к маскирующим и имитационным помехам.
В системе может решаться, как навигационная задача, когда абонентские терминалы принимают сигналы опорных станций и определяют свои координаты, направление движения и скорость, так и задача мониторинга, когда навигационные данные от абонентских терминалов передаются на аппаратно-программный комплекс (7), где собираются данные мониторинга, производится управление работой системы, в том числе управление сменой ПСП в опорных станциях (1,2,3,4) и абонентских терминалах (5, 6) по сложному закону.
В системе реализован запросный режим позиционирования. Запросный режим имеет аналогию с активной радиолокацией с активным ответом, при которой запросный и ответный сигналы кодируются, чтобы по коду можно было определить адрес объекта и получить дополнительную информацию.
Важное преимущество систем с активным ответом - выигрыш в дальности действия из-за значительной мощности ответного сигнала.
Как показано на ФИГ. 1 абонентские терминалы выдают навигационный сигнал в запросном режиме. Опорные станции принимают такие сигналы и выдают ответные сигналы, которые принимают абонентские терминалы и решают задачу позиционирования с использованием дальномерного метода. При этом измеряется двойное расстояние (псевдодальность) от абонентских терминалов (5,6) к опорным станциям (1, 2, 3, 4) и обратно.
Достоинства запросного режима:
- отличается повышенной точностью решения навигационной задачи;
- в ряде применений является единственно возможным, когда отсутствует синхронизированная сеть опорных станций;
- режим может быть реализован на двух опорных станциях, принимающих сигналы от абонентских терминалов и посылающих ответные сигналы асинхронно;
- запросный режим используется для синхронизации опорных станций в беззапросном режиме;
- передатчики опорных станций работают не постоянно, а только по запросу. При этом снижается энергопотребление аппаратуры.
В запросном режиме используется дальномерный метод позиционирования, при котором абонентский терминал излучает дальномерный код, модулирующий несущую. При этом нет необходимости в синхронизации опорных станций. Несколько опорных станций с известными координатами принимают сигнал и посылают ответные сигналы, которые принимаются абонентским терминалом. С учетом скорости света в атмосфере и задержек в аппаратуре при приеме-передаче сигналов в абонентском терминале вычисляется двойное расстояние между абонентским терминалом и несколькими опорными станциями. При этом в AT решается навигационная задача.
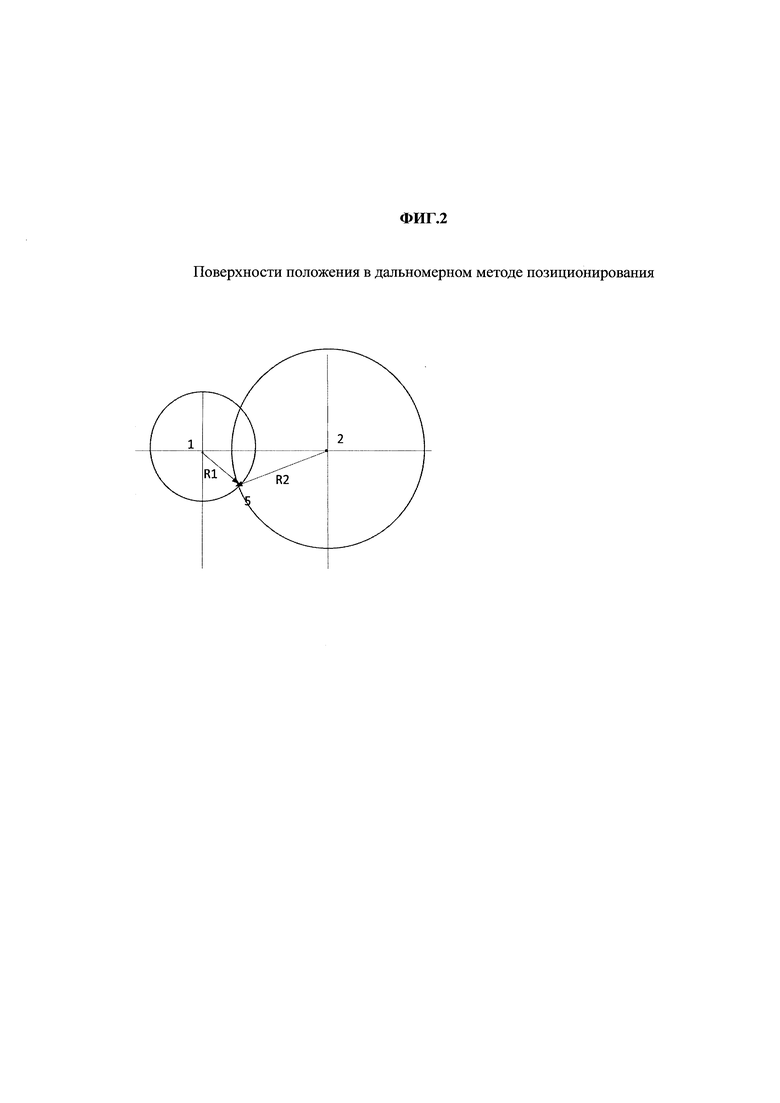
Дальномерный метод решения навигационной задачи представлен на ФИГ. 2 и заключается в определении местоположения абонентского терминала (5) измерением расстояний между абонентским терминалом (5) и опорными станциями (1,2).
Каждая поверхность положения - сфера с центром в опорной станции (1,2) и радиусом, равным дальности. Так как точки 5 (абонентский терминал), опорных станции (1,2)находятся в одной плоскости, то поверхности положения переходят в окружности радиусами R1 и R2 с точкой пересечения 5, как показано на ФИГ. 2. Вторую точку пересечения сфер надо отбросить, исходя из дополнительных данных.
Расчет инструментальной ошибки измерения псевдодальности и позиционирования в дальномерном режиме в ЛСН.
1. Инструментальная ошибка измерения псевдодальности при дискретизации входного сигнала в аналого-цифровом преобразователе (АЦП).
При позиционировании в запросном режиме (дальномерном методе) абонентский терминал (5) излучает сигналы запроса, а опорные станции (1,2) принимают их и переизлучают как сигналы ответа, которые принимаются абонентским терминалом (5). Так как скорость распространения радиоволн в воздухе постоянна, то принятые в абонентским терминалом (5) ответные сигналы опорных станций РОС (1,2) запаздывают по отношению к излученным сигналам на определенное время t3:

где R - расстояние между опорной станцией и абонентским терминалом (м),
 - время задержки обработки сигнала при приеме/передаче в опорных станциях и абонентских терминалах и определяется в процессе калибровки.
- время задержки обработки сигнала при приеме/передаче в опорных станциях и абонентских терминалах и определяется в процессе калибровки.
Так как инструментальная ошибка позиционирования в ЛСН определяется точностью измерения времени задержки сигнала, зависящей от ошибки дискретизации входного сигнала в приемнике во времени, то предлагается следующий оценочный расчет инструментальной ошибки измерения псевдодальности в ЛСН - Δинстр. (оценочный расчет приведен с численными вычислениями для лучшего восприятия, естественно значения могут быть другими):

где  - инструментальная ошибка измерения псевдодальности при дискретизации входного сигнала в аналого-цифровом преобразователе (АЦП) приемника с точностью до одного символа псевдослучайной последовательности (ПСП);
- инструментальная ошибка измерения псевдодальности при дискретизации входного сигнала в аналого-цифровом преобразователе (АЦП) приемника с точностью до одного символа псевдослучайной последовательности (ПСП);
 - скорость света в вакууме (скорость распространения радиоволн)
- скорость света в вакууме (скорость распространения радиоволн)
 - частота следования символов ПСП;
- частота следования символов ПСП;
 - количество отсчетов выходного сигнала АЦП на каждый из символов ПСП.
- количество отсчетов выходного сигнала АЦП на каждый из символов ПСП.
2. Частота дискретизации входного сигнала.
Частота дискретизации входного сигнала в АЦП приемника выбирается из расчета К1 отсчетов на один символ ПСП.
Так как в запросном режиме измеряется двойное расстояние между опорной станцией (1,2) и абонентским терминалом, и измеренная задержка делится на 2, то и инструментальная ошибка измерения также делится на 2.
Таким образом, инструментальная ошибка измерения псевдодальности при дискретизации входного сигнала в АЦП приемника на частоте  при типовых числовых данных
при типовых числовых данных 
 в дальномерном методе:
в дальномерном методе:

3. Повышение частоты дискретизации входного сигнала.
Для уменьшения инструментальной ошибки выполняется повышение частоты дискретизации входного сигнала в К2 раз без повышения частоты работы АЦП.
Для этого берется К2=10 отсчетов на каждый символ, следующий с частотой дискретизации  путем сдвига тактирующего сигнала на 1/10 такта на каждой из К2 посылок ПСП.
путем сдвига тактирующего сигнала на 1/10 такта на каждой из К2 посылок ПСП.
При обработке К2=10 посылок ПСП инструментальная ошибка измерения псевдодальности в дальномерном методе равна:

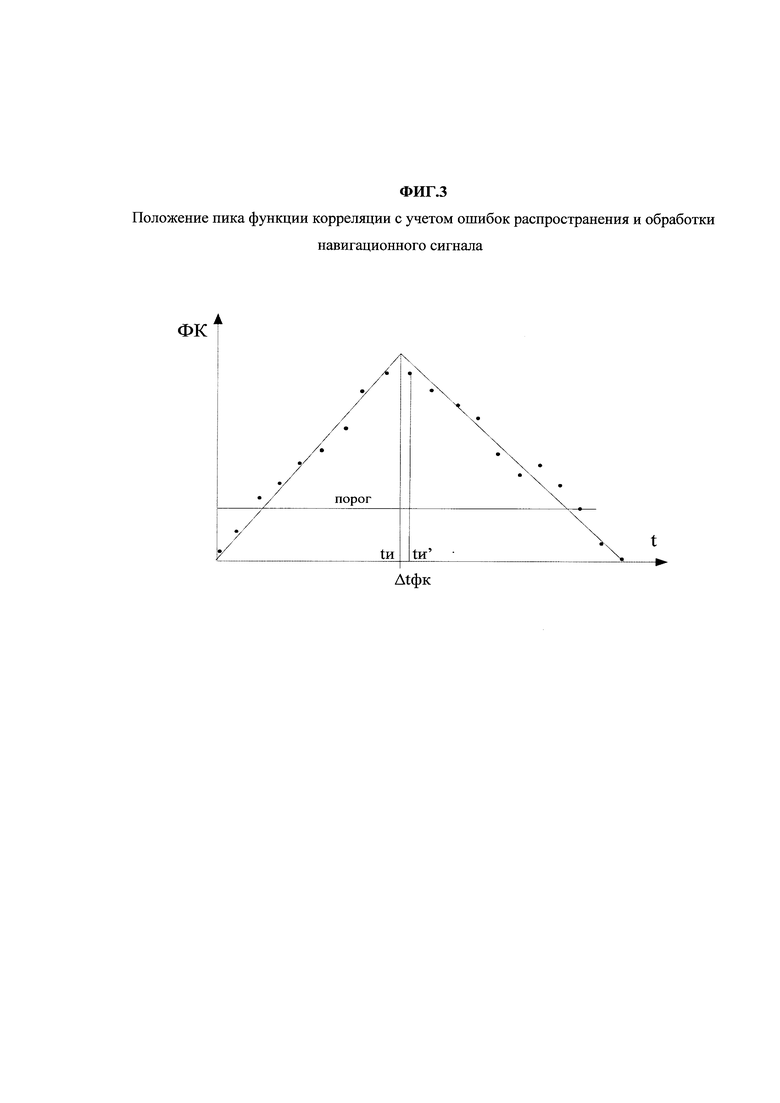
4. Точное определение положения пика функции корреляции.
Функция корреляции (ФК) в приемнике абонента вычисляется с использованием статистики полученных отсчетов.
График отсчетов ФК в районе пика выглядит как треугольник с основанием К 1=20 отсчетов по оси времени, как показано на ФИГ. 3. При этом пик ФК представлен не одним отсчетом, а «растянут» на К1 тактов.
Отсчеты ФК следуют частотой  и обозначены точками, которые не лежат на одной прямой из-за ошибок распространения и обработки навигационного сигнала.
и обозначены точками, которые не лежат на одной прямой из-за ошибок распространения и обработки навигационного сигнала.
Положение пика ФК вычисляется как точка пересечение двух прямых, составляющих треугольник и проведенных оптимально среди 10 отсчетов (слева)+10 отсчетов (справа) с использованием метода наименьших квадратов. При этом получим точку to, которая определяет более точное положение пика ФК и будет отличаться на величину  от значения
от значения  полученного в случае, когда ФК вычисляется с точностью до отсчета с инструментальной ошибкой измерения псевдодальности Δдт=0,749 м.
полученного в случае, когда ФК вычисляется с точностью до отсчета с инструментальной ошибкой измерения псевдодальности Δдт=0,749 м.
Определение точного значения сигнала и момента пика ФК начинается при превышении сигналом на выходе согласованного фильтра некоторого порога.
При этом с использованием метода наименьших квадратов при вычислении момента пика ФК инструментальная ошибка измерения псевдодальности уменьшается в К3 раз и представляет собой среднеквадратичное отклонение (СКО) с учетом ошибки распространения и обработки навигационного сигнала. По имеющимся данным статистики - К3=2-3.


5. Увеличение числа измерений псевдодальности.
Согласно закону теории погрешностей, если необходимо повысить точность результата (при исключенной систематической погрешности) необходимо увеличить число измерений.
Если увеличить число измерений L1 при измерении псевдодальности в 25 раз, то есть обрабатывать кадр из 25 ПСП, то СКО будет меньше в 
Использование кадра из 25 ПСП необходимо, так как в нем содержится адрес абонента и опорной станции, а также, другая необходимая информация.
При этом получаем инструментальную ошибку СКО  при использовании метода наименьших квадратов при измерении псевдодальности учетом ошибки распространения и обработки навигационного сигнала:
при использовании метода наименьших квадратов при измерении псевдодальности учетом ошибки распространения и обработки навигационного сигнала:


(при доверительной вероятности 0,67).
Длительность кадра составляет 25 мсек. При этом частота выдачи результата -10 Гц.
Полученное значение инструментальной ошибки определения псевдодальности составляет лишь часть реальной ошибки.
Реальная ошибка может быть определена только при измерении на имитаторе сигнала и проведении натурных испытаний.
6. Оценка реальной ошибки измерения псевдодальности.
Потенциальная ошибка измерения псевдодальности характеризует предельно достижимую точность и определяется отношением сигнал/шум и шириной спектра навигационного сигнала.
Потенциальная ошибка (СКО) измерения псевдодальности для радиоимпульса с колокольной огибающей приведена в [9]. Так как в запросном режиме измеряется двойное расстояние между РОС и AT и измеренная задержка делится на 2, то и потенциальная ошибка измерения также делится на 2:

где с = 299796459,2 ± 1,1 м/с - скорость света в вакууме (скорость распространения радиоволн);
 - эффективная ширина спектра навигационного сигнала на уровне 0,46;
- эффективная ширина спектра навигационного сигнала на уровне 0,46;
 - частота следования символов ПСП;
- частота следования символов ПСП;
 - количество отсчетов выходного сигнала АЦП на каждый из символов ПСП;
- количество отсчетов выходного сигнала АЦП на каждый из символов ПСП;
 - отношение сигнал/шум по мощности на выходе согласованного фильтра, вычисляющего ФК. Расчетное отношение мощности сигнала к мощности шума
- отношение сигнал/шум по мощности на выходе согласованного фильтра, вычисляющего ФК. Расчетное отношение мощности сигнала к мощности шума  на выходе согласованного фильтра определяется пороговым устройством, стоящем на выходе согласованного фильтра и фиксирующем момент превышении порога на графике ФК (как показано на ФИГ. 3). Определение точного значения и момента пика ФК начинается при превышении сигналом на выходе согласованного фильтра некоторого порога.
на выходе согласованного фильтра определяется пороговым устройством, стоящем на выходе согласованного фильтра и фиксирующем момент превышении порога на графике ФК (как показано на ФИГ. 3). Определение точного значения и момента пика ФК начинается при превышении сигналом на выходе согласованного фильтра некоторого порога.
Экспериментальным путем установлено 
С учетом увеличения частоты дискретизации (К1), повторения измерений (L1), увеличения количества отсчетов на символ (К2), уточнения положения пика функции корреляции (К3) для  как при вычислении (7) потенциальная ошибка равна:
как при вычислении (7) потенциальная ошибка равна:

и составляет 10% от реальной ошибки измерения псевдодальности [9].
При этом оценка реальной ошибки измерения псевдодальности в дальномерном методе:

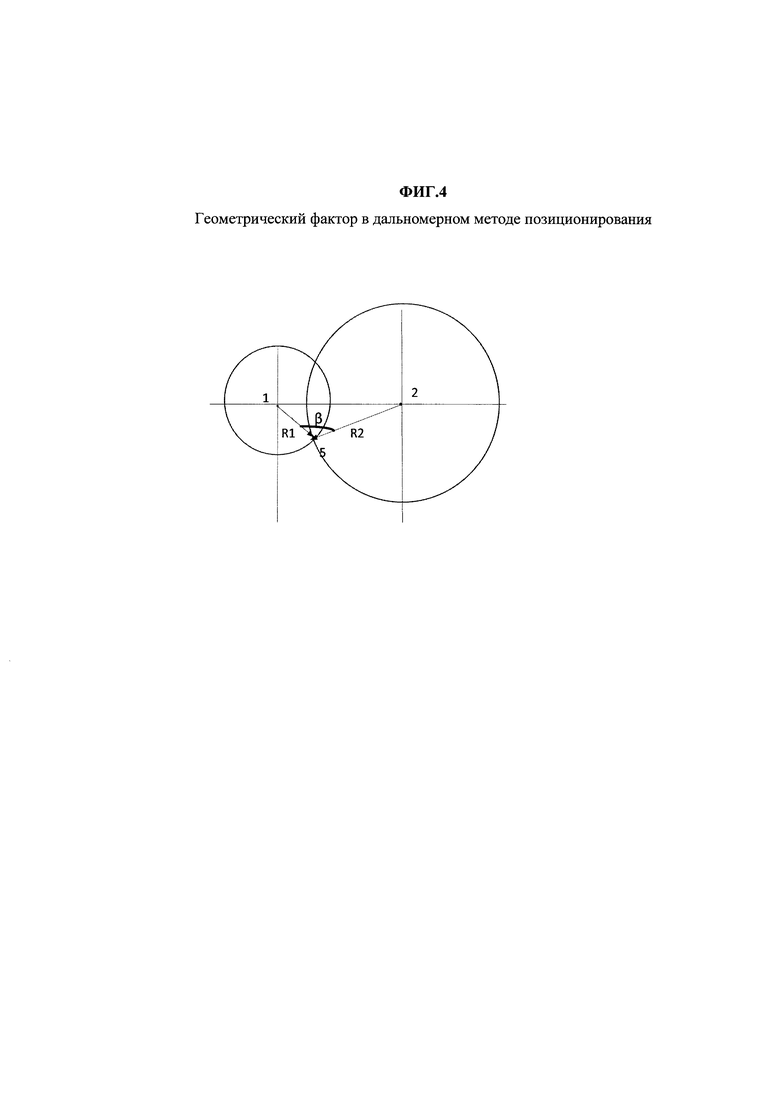
7. Влияние геометрического фактора на точность позиционирования в системе. Инструментальная ошибка позиционирования СКО  по двум опорным станциям, расположенным в точках 1 и 2, имеющим ошибки измерения псевдодальности до абонента
по двум опорным станциям, расположенным в точках 1 и 2, имеющим ошибки измерения псевдодальности до абонента


где n=2 (количество линий положения - ЛП).
Геометрический фактор (Dilution of Precision) DOP = 1/sinβ (β - угол между векторами R1 и R2, направленными от опорных станий 1 и 2 к абонентскому терминалу 5, как показано на ФИГ. 4.
Абонент находится в точке 5 пересечения двух окружностей с радиусами R1 и R2. Геометрический фактор DOP в зависимости от угла β приведен в таблице 1.
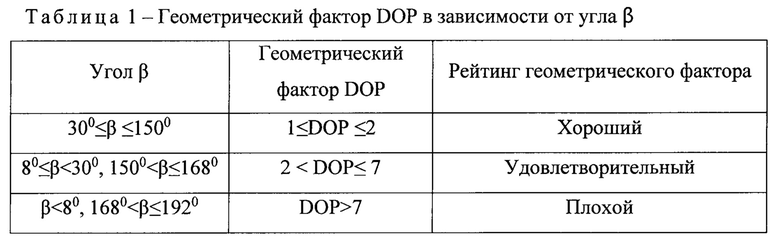
Погрешность позиционирования (СКО) пропорциональна DOP = 1/sin β, так как:

Так как в дальномерном методе СКО измерения псевдодальности  получаем СКО позиционирования (при β = 30°, DOP = 1/sin β=2,0, n = 2,
получаем СКО позиционирования (при β = 30°, DOP = 1/sin β=2,0, n = 2,  ):
):

Всего в кадре содержатся 25 ПСП. Длительность кадра 25 мсек.
При этом обеспечивается частота выдачи результата до -10 Гц.
8. Увеличение числа измерений при позиционировании.
Если увеличить число измерений при позиционировании в ЛСН в L2 = 16 раз, то есть обрабатывать 16 кадров по 25 ПСП, то согласно закону теории погрешностей СКО будет меньше в 

При идеальном геометрическом факторе DOP = 1 (угол β = 90°) получим 
Длительность 16 кадров по 25 ПСП- 400 мсек. При этом частота выдачи результата - 1 Гц.
Значение СКО в дальномерном методе составляет лишь часть реальной ошибки позиционирования, которую можно определить с использованием имитатора сигнала ЛСН и натурных испытаний.
8. Результаты расчета инструментальных ошибок определения координат в зависимости от геометрического фактора и частоты выдачи результата приведены в Таблице. 2.
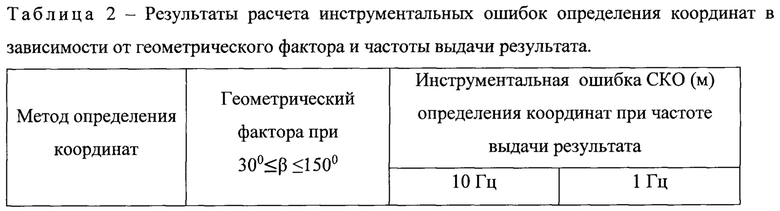
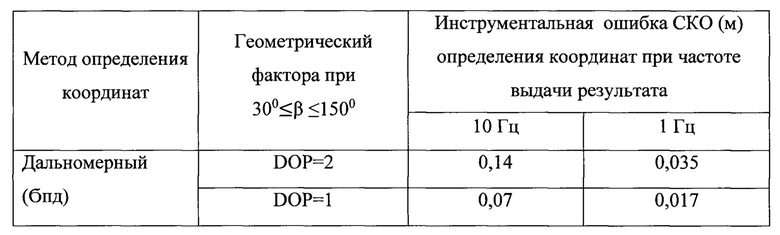
Расчеты инструментальной ошибки позиционирования показали возможность достижения сантиметровой точности (СКО) локальной радионавигационной системы при различных геометрических факторах.
Устойчивость к маскирующим помехам обеспечивается тем, что:
- в системе используется шумоподобные сигналы, уровень которых превышает уровень сигналов ГНСС на входе приемника в 10000 раз и для которых подавление помехи на выходе согласованного фильтра по мощности составляет 2 В раз, где В=1024-база сигнала [8];
- решение задачи в навигационном приемнике принимается не по фазе несущей, подверженной воздействию помех, а по высокоточному измерению псевдодальности на основе кода сигнала, устойчивого к воздействию помех, что обеспечивается согласованной фильтрацией сигнала с точным определением момента пика функции корреляции.
Устойчивость к имитационным помехам обеспечивается тем, что:
- устойчивость к генерируемым имитационным помехам (100%) обеспечивается использованием большого количества псевдоортогональных ПСП (более 1000 ПСП), динамически меняющихся по определенному сложному закону под управлением АПК, вплоть до использования криптографических алгоритмов;
- устойчивость к ретранслированным имитационным помехам обеспечивается тем, что они подобны переотраженным сигналам и устраняются методами борьбы с переотражениями.
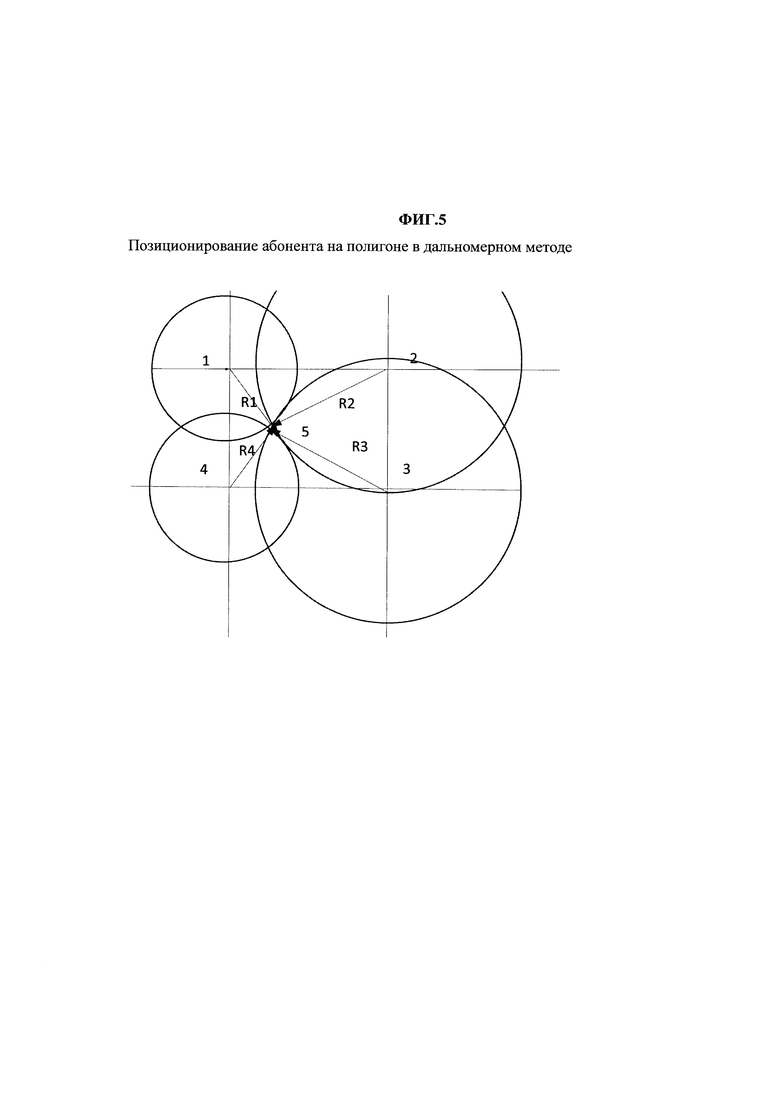
В целях борьбы с переотражениями следует рассмотреть рабочую зону ЛСН (сферы с радиусами R1, R2, R3, R4) на испытательном полигоне в дальномерном методе, представленную на ФИГ. 5.
Центры сфер, находящиеся в местах расположения четырех опорных станций, показаны точками (1,2,3,4). Абонент находится в точке пересечения сфер (5). Решение навигационной задачи - нахождение этой точки.
Переотраженные сигналы не входят в решение навигационной задачи и не учитываются, так как не попадают в точки пересечения окружностей (сфер), в центрах которых расположены опорные станции (1, 2, 3, 4) с известными координатами
Таким образом, борьба с влиянием имитационных ретранслированных помех производится такими же методами, как борьба с переотраженными сигналами.
Задача мониторинга в дальномерной системе решается следующим образом.
После точного позиционирования навигационная информация в AT накладывается на помехоустойчивый навигационный сигнал (ПСП) с использованием функции XOR (сложение по модулю 2) и передается в АПК (7). На приемном конце в АПК на сигнал накладывается такая же ПСП с использованием функции XOR и навигационная информация выделяется. Так решается задача мониторинга. Это возможно, так как в абонентских терминалах (5,6) есть передатчики.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ навигации с использованием абонентского терминала и абонентский терминал | 2023 |
|
RU2837647C1 |
| Помехоустойчивая разностно-дальномерная локальная радионавигационная система, обеспечивающая высокоточное позиционирование | 2022 |
|
RU2802323C1 |
| Помехоустойчивая разностно-дальномерная локальная радионавигационная система, комплексированная с инерциальной навигационной системой, обеспечивающая высокоточное позиционирование движущихся объектов | 2023 |
|
RU2802322C1 |
| Способ навигации с использованием высокоточного абонентского терминала и высокоточный абонентский терминал | 2023 |
|
RU2832572C1 |
| Способ, реализующий точную помехоустойчивую синхронизацию опорных станций локальной навигационной системы | 2023 |
|
RU2827095C1 |
| Способ навигации с интеграцией систем и средств обеспечения сквозного позиционирования повышенной точности и устойчивости к помехам | 2023 |
|
RU2836625C1 |
| Способ навигации с использованием радионавигационных опорных станций и опорная станция для его осуществления | 2023 |
|
RU2837598C1 |
| Способ определения местоположения абонентских терминалов, перемещающихся в зоне покрытия локальной системы навигации | 2023 |
|
RU2825248C1 |
| СПОСОБ НАВИГАЦИИ В ПОМЕЩЕНИИ И РАДИОНАВИГАЦИОННЫЙ ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2838877C1 |
| Способ определения местоположения объекта навигации | 2024 |
|
RU2824861C1 |
Изобретение относится к области радионавигации. Техническим результатом является обеспечение высокоточного позиционирования абонентов в запросном режиме с использованием дальномерного метода позиционирования, обеспечивающего сантиметровую точность позиционирования с использованием помехоустойчивого способа корреляционной обработки шумоподобных сигналов и высокую устойчивость к маскирующим и имитационным помехам. Упомянутый технический результат достигается тем, что дальномерная локальная радионавигационная система, обеспечивающая высокоточное позиционирование, использующая навигационный сигнал, свободный от воздействия ионосферы, тропосферы и погрешности определения эфемерид спутников, независимый от глобальных навигационных спутниковых систем, решающая как задачу позиционирования, так и задачу мониторинга объектов, содержит приемопередатчики на опорных станциях и абонентских терминалах, использует запросный режим и дальномерный метод позиционирования в условиях отсутствия синхронизации опорных станций, обеспечивает сантиметровую точность позиционирования с использованием помехоустойчивого метода корреляционной обработки кода сигнала, а также устойчивость к сгенерированным имитационным помехам с использованием динамически меняющихся по сложному закону псевдослучайных последовательностей, устойчивость к ретранслированным имитационным помехам с использованием методов борьбы с переотраженными сигналами, устойчивость к маскирующим помехам с использованием шумоподобных сигналов большой мощности в точке приема, для которых подавление помехи на выходе согласованного фильтра по мощности составляет 2 В раз, где В-база сигнала. 5 ил., 2 табл.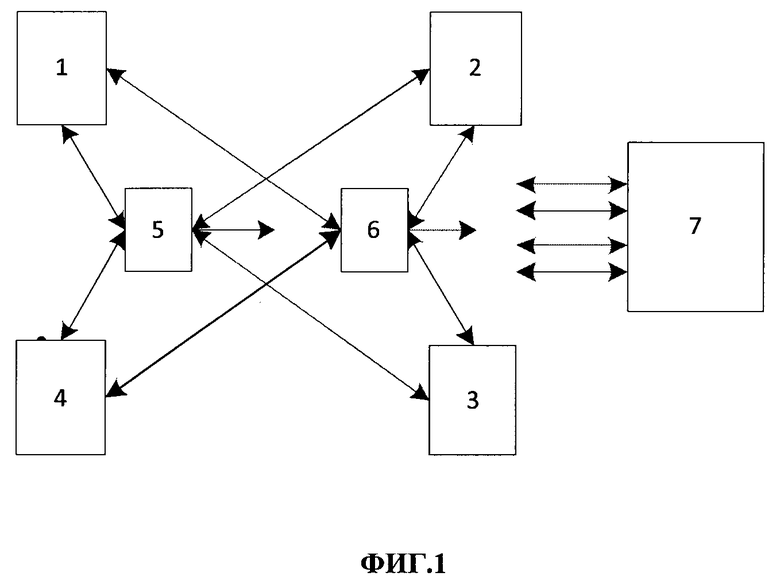
Дальномерная локальная радионавигационная система, обеспечивающая высокоточное позиционирование, использующая навигационный сигнал, свободный от воздействия ионосферы, тропосферы и погрешности определения эфемерид спутников, независимый от глобальных навигационных спутниковых систем, решающая как задачу позиционирования, так и задачу мониторинга объектов, отличающаяся тем, что содержит приемопередатчики на опорных станциях и абонентских терминалах, использует запросный режим и дальномерный метод позиционирования в условиях отсутствия синхронизации опорных станций, обеспечивает сантиметровую точность позиционирования с использованием помехоустойчивого метода корреляционной обработки кода сигнала, а также устойчивость к сгенерированным имитационным помехам с использованием динамически меняющихся по сложному закону псевдослучайных последовательностей, устойчивость к ретранслированным имитационным помехам с использованием методов борьбы с переотраженными сигналами, устойчивость к маскирующим помехам с использованием шумоподобных сигналов большой мощности в точке приема, для которых подавление помехи на выходе согласованного фильтра по мощности составляет 2В раз, где В-база сигнала.
| НАВИГАЦИОННАЯ СИСТЕМА | 2012 |
|
RU2555860C2 |
| ЛОКАЛЬНАЯ ФАЗОВАЯ РАЗНОСТНО-ДАЛЬНОМЕРНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2604652C2 |
| СПОСОБ И СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МОБИЛЬНОГО ТЕРМИНАЛА ВНУТРИ ЗДАНИЙ НА ОСНОВЕ ГЛОНАСС-ПОДОБНОГО СИГНАЛА | 2012 |
|
RU2533202C2 |
| US2015236751 A1, 20.08.2015 | |||
| CN103364810 A, 23.10.2013 | |||
| US2008169958 A1, 17.07.2008. | |||

