ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к промышленному роботу с адаптивными компенсаторами внешних нагрузок, а именно, к компенсатору системы с двумя степенями свободы, включающей вращательный и призматический шарнир.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Промышленные роботы испытывают большие статические нагрузки при работе в больших рабочих пространствах. Эти статические силы в основном генерируются силой тяжести, что означает, что большая доля энергии, затрачиваемой во время работы, идет на поддержание веса робота.
Были предложены различные подходы для компенсации гравитации.
Из уровня техники широко известны системы компенсации промышленных роботов.
Известно устройство вертикального перемещения для уравновешивания механизма (см. SU1044591A1, опубл.30.09.1983)(1), содержащее подвижное и неподвижное основания, имеющие каждое паз, параллельный плоскости оснований, шарнирно-рычажный механизм «нюрнебергские ножницы», одни концы свободных рычагов которого шарнирно связаны с основанием с возможностью поворота, а другие установлены в пазах с возможностью поворота и перемещения, и уравновешивающую пружину, одним концом связанную с одним из рычагов механизма. Устройство снабжено установленным на одном из оснований роликом и охватывающим последний гибким элементом, связывающим рычаг с уравновешивающей пружиной, другой конец которой закреплен на основании.
Предложенный в аналоге (1) подход позволяет манипулировать большими полезными нагрузками, однако увеличивает общую потенциальную энергию системы.
Также из уровня техники известен, выбранный в качестве наиболее близкого аналога пружинный механизм, преимущественно для уравновешивания устройств вертикального перемещения (см SU932005, опубл.30.05.1982)(2), содержащий установленные одно в другом неподвижное и подвижное звенья, закрепленную на одном из них одним концом пружину, закрепленный на этом же звене поворотный блок, гибкий элемент, охватывающий блок и соединенный одним концом со свободным концом пружины, и опорный элемент, выполненный в виде рычага, шарнирно связанного со звеном, на котором закреплен поворотный блок, и со свободным концом гибкого элемента, другое звено выполнено с направляющей, с которой взаимодействует свободный конец рычага.
Механизм (2) достигает различных результатов между полной и частичной компенсацией веса звеньев. Однако остается проблема, связанная с призматическими шарнирами, которая заключается в том, что необходима компенсация силы тяжести для этого типа шарниров, поскольку центр масс призматического шарнира меняется при движении.
КРАТКОЕ ИЗЛОЖЕНИЕ ИЗОБРЕТЕНИЯ
Соответственно, существует необходимость устранить, по меньшей мере, часть упомянутых выше недостатков. В частности, существует потребность системе адаптивной компенсации промышленного робота, которая обеспечивала эффективную компенсацию системы с двумя степенями свободы, включающей вращательный и призматический шарнир
Данное изобретение направлено на решение технической проблемы, связанной с увеличением эффективности компенсации сил гравитации систем, включающих включающей вращательный и призматический шарнир.
Техническим результатом изобретения является создание системы адаптивной компенсации промышленного робота повышенной эффективности.
Достижение заявленного технического результат возможно посредством системы адаптивной компенсации промышленного робота, содержащей по меньшей мере одну пару с двумя степенями свободы, включающую вращательный и призматический шарнир, на которой закреплен компенсатор, выполненный в виде пружин, закреплённых на тросах, перемещающихся по по меньшей мере двум шкивам.
Система характеризуется тем, что пружины выполнены с пассивно-адаптивной подвижной точкой крепления.
В частном варианте выполнения пружины соединены с тросами, закрепленными на штифтово-шлицевом механизме, тросы взаимодействуют со шкивами, один из которых закреплен на передаче рейка-шестерня, при этом шестерня передачи соединена конической передачей с самоблокирующейся червячной передачей, на выходе которой размещен шкив.
В частном варианте выполнения компенсатор вращательного шарнира содержит шкив ременной передачи с ползунком, и стойку, на которой размещены пружины, одна из которых соединена с ползунком, размещенным на стойке, при этом вторая пружина жестко закреплена на корпусе.
В частном варианте выполнения компенсатор снабжен штифтово -шлицевым механизмом, соединенным с тросом пружины, обеспечивающим натяжение пружины.
В частном варианте выполнения пружины имеют жесткость, обеспечивающую уравновешивание вращательного и призматического шарнира.
Вышеупомянутые и другие цели, преимущества и особенности настоящего изобретения станут более очевидными из следующего не ограничивающего описания его примерного варианта осуществления, приведенного в качестве примера со ссылкой на прилагаемые чертежи.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
Сущность изобретения поясняется чертежами, на которых:
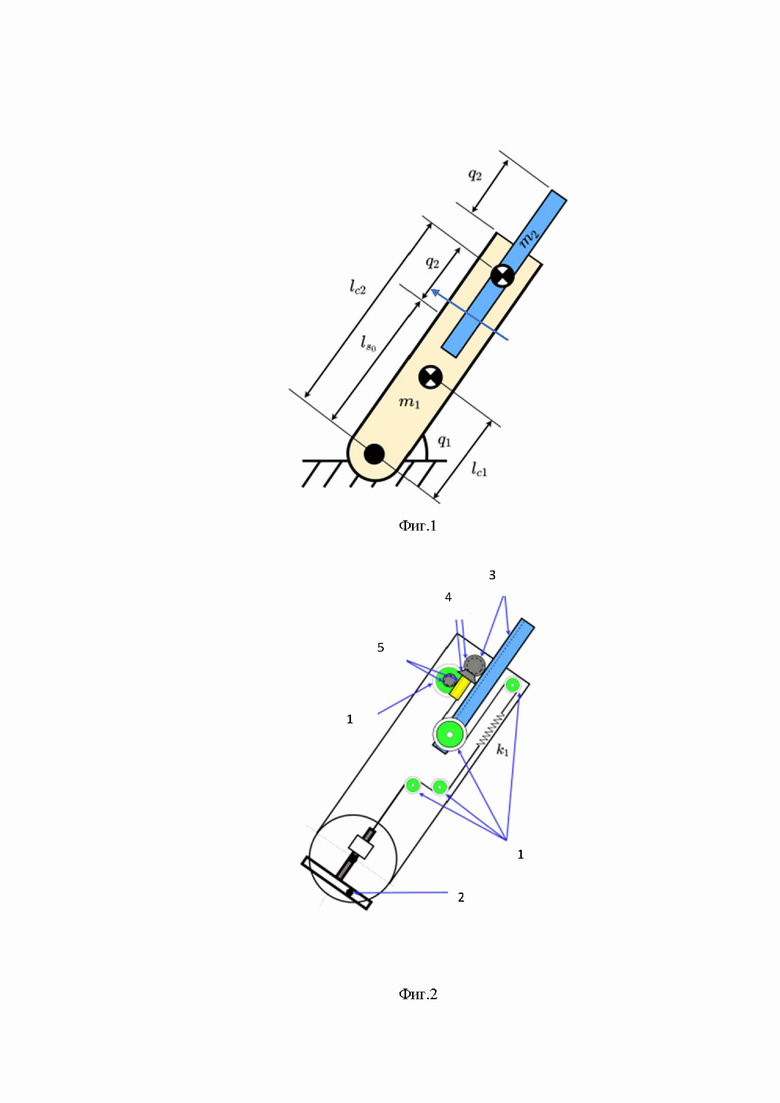
Фиг. 1 – геометрическое представление системы с двумя степенями свободы;
Фиг.2 – геометрическое представление системы с двумя степенями свободы с, компенсатором призматического шарнира;
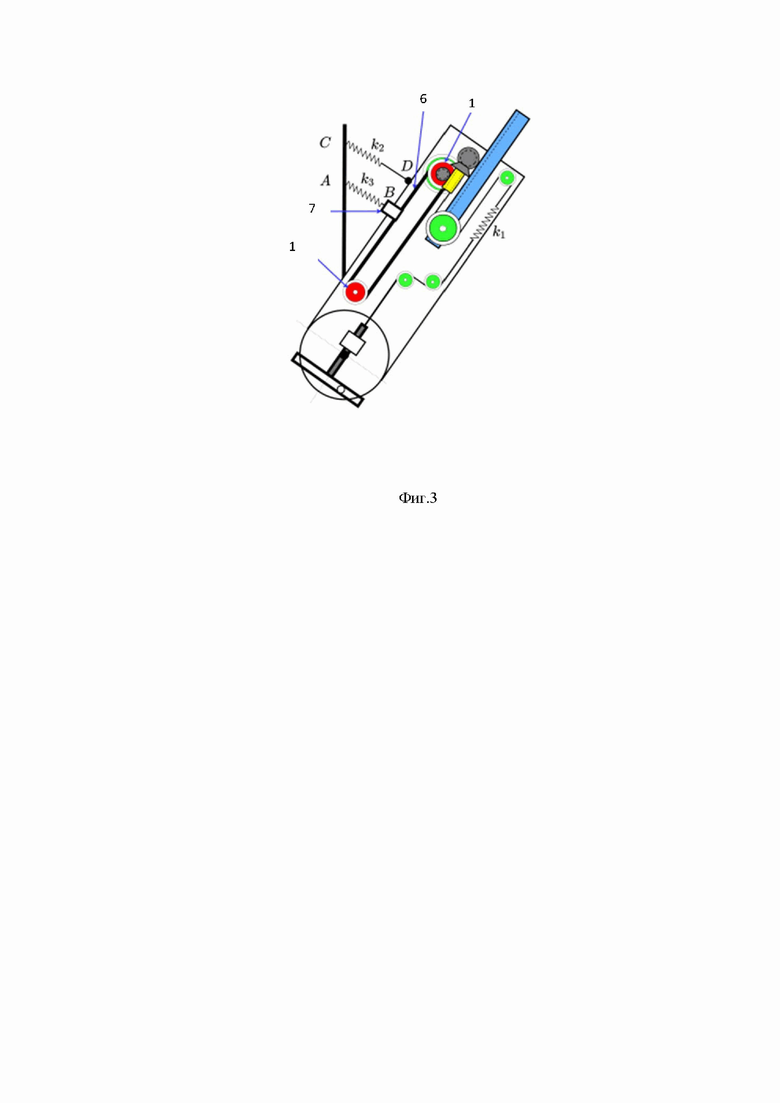
Фиг. 3 – геометрическое представление системы с двумя степенями свободы с, компенсатором призматического и вращательного шарнира;
Позиции на фиг.1-3 обозначают следующее:
1- шкив;
2- штивтово-шлицевой механизм;
3- передача рейка-шестерня;
4- коническая передача;
5- червячная передача;
6- ремень;
7- ползунок
Эти чертежи не охватывают и, кроме того, не ограничивают весь объем вариантов реализации данного технического решения, а представляют собой только иллюстративный материал частного случая его реализации.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Заявленная следующая система адаптивной компенсации промышленного робота с применением гравитационного компенсатора для призматических соединений. Механизм зависит от натяжения пружины вместе с комбинацией шкивов и зубчатой передачи. Кроме того, этот механизм предназначен для компенсации силы тяжести на призматических соединениях при различной ориентации. Также предлагаемая концепция включает компенсацию силы тяжести для обоих шарниров в случае применения механизмов с двумя степенями свободы с призматическим шарниром, установленным на поворотном шарнире.
Система, схематически показанная на фиг. 1 состоит из поворотного шарнира и призматического шарнира. Система состоит из двух масс m1 и m2, расположенных на расстояниях lc1 и lc2 от центра вращения соответственно. Поворотный шарнир вращается под углом q1 и призматическое соединение скользят на расстоянии q2, при этом гравитационный момент в шарнире вращения определяется следующим образом:
τ1 = (lc1 m1 +lc2 m2) g cos(q1),
где τ1 - крутящий момент вращающегося шарнира.
Поскольку призматический шарнир скользит значением q2, мы можем преобразовать переменную lc2 следующим образом:
lc2 = ls0 +q2,
где ls0 - минимальное расстояние между m2 и центром вращения.
Что касается усилия в призматическом соединении:
τ2 = m2 g sin(q1)
де τ2 - силовое усилие призматического соединения.
Это уравнение показывает, что усилие в призматическом шарнире нелинейно изменяется соответственно с углом поворота первого шарнира.
Механизм со штифтовым шлицом, показанный на фиг. 2 предназначен для компенсации такой нелинейности. Механизм состоит из шлица- паза, который вращается на угол θ вокруг точки O и линейно перемещается через точку O. Штифт p закреплен на постоянном вертикальном расстоянии r от точки O и скользит вдоль паза. Как точка p фиксируется, расстояние между прорезью и точкой изменяется следующим образом:
s = r sin(θ),
где s - расстояние между щелью и точкой O,
а r -расстояние между точками O и p.
Можно использовать этот механизм для компенсации гравитационного усилия в призматическом шарнире, как показано на рис. 3. Механизм со штифтом используется для изменения натяжения пружины в соответствии с углом поворота q1. Чтобы статически сбалансировать усилие призматического соединения, можно правильно выбрать жесткость пружины k и расстояние между штифтами r.
k1 r sin(q1) = 1/2 m2 g sin(q1)
И соответственно, мы можем выбрать значение жесткости пружины k1
k1 = m2 g/2 r
Компенсация для поворотного шарнира может быть достигнута с помощью конструкции, показанной на фиг. 3. Возможно компенсировать гравитационный момент в шарнире вращения, разместив пружину между точками A и B. Точка A зафиксирована на вертикальном расстоянии a от земли, в то время как точка B имеет начальное смещение b от центр вращения и скольжения по звену. Точка В прикреплена к ползуну, установленному на ременно-шкивном механизме. Ремень перемещает ползун на расстояние q* вдоль звена, что означает, что скольжение точки B представляет собой отношение смещения призматического шарнира, которое может быть достигнуто путем редукции. Другая пружина соединяется между точками C и D, где точка C зафиксирована на вертикальном расстоянии c, а точка D зафиксирована на расстоянии d вдоль звена. Что делает вектор, представляющий положение точек B и D, следующим образом:

Это означает, что мы можем управлять интервалом, в котором точка B может скользить так же, как и местоположением этого интервала.
Эта система представляет собой концепцию гравитационной компенсации призматических шарниров для роботизированных систем. Концепция основана на аналитическом разделении выражений усилий в суставах и сопоставлении их с эквивалентными механическими механизмами, использующими линейные пружины. Соединяя эти механизмы с шарнирами роботизированной системы, они могут создавать уравновешивающие усилия, которые приводят к статическому равновесию без необходимости усилий привода.
Система адаптивной компенсации промышленного робота, показанная на фиг.3 предназначена для пары с двумя степенями свободы, состоящую из вращательного и призматического шарнира. На указанной паре закреплен компенсатор, выполненный в виде пружин, закреплённых на тросах, перемещающихся шкивам. Пружины компенсатора выполнены с пассивно-адаптивной подвижной точкой крепления.
Пружины компенсатора соединены с тросами, закрепленными на штифтово-шлицевом механизме (2), тросы взаимодействуют со шкивами (1), один из которых закреплен на передаче рейка-шестерня(3), при этом шестерня передачи соединена конической передачей (4) с самоблокирующейся червячной передачей (5), на выходе которой размещен шкив (1).
Компенсатор вращательного шарнира, показанный на фиг.3 содержит шкив (1) ременной передачи (6) с ползунком(7), и стойку, на которой размещены пружины, одна из которых соединена с ползунком (7), размещенным на стойке, при этом вторая пружина жестко закреплена на корпусе.
Компенсатор снабжен штифтово -шлицевым механизмом (2), соединенным с тросом пружины, которые может изменить натяжение пружины. Пружины могут быть подобраны таким образом, чтобы их жесткость уравновешивала вращательный и призматический шарнир.
Разработка гравитационного компенсатора для призматических соединений является сложной задачей из-за перемещения центра масс. В отличие от звеньев, соединенных с поворотными шарнирами, которые имеют определенный центр масс, призматические шарниры изменяют местоположение центра масс, что увеличивает нелинейность усилия привода при движении вдоль наклонной оси. Подвижная точка крепления пружины помогает решить эту проблему, заставляя механизм уравновешивания изменяться пропорционально размаху движения. Использование червячных передач важно для реализации этой концепции. Червячная передача самоблокирующегося типа может удерживать обратный крутящий момент за счет трения. Это обеспечивает изоляцию сил за счет введения внутренней силы реакции, которая блокирует любой обратный крутящий момент. Он действует как односторонний затвор для передачи крутящего момента, поскольку может передавать крутящий момент в одну сторону и блокирует обратный крутящий момент. Еще одним преимуществом червячных передач является то, что они имеют высокое передаточное отношение, которое снижает скорость и увеличивает крутящий момент, что делает сопротивление движению менее значительным.
ПРОМЫШЛЕННОЕ ПРИМЕНЕНИЕ
Предложенные устройства предназначены для ряда применений, включающих компенсацию гравитации механизмов с вращательным и призматическим шарниром.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АДАПТИВНОЙ КОМПЕНСАЦИИ ПРОМЫШЛЕННОГО РОБОТА | 2022 |
|
RU2785421C1 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| ВЫСОКОСКОРОСТНОЙ РОБОТ ПАРАЛЛЕЛЬНОЙ КИНЕМАТИКИ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2006 |
|
RU2400351C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКООРДИНАТНЫМ ПЯТИЗВЕННЫМ МАНИПУЛЯТОРОМ | 2004 |
|
RU2288091C2 |
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
| Манипулятор роботизированного хирургического комплекса | 2020 |
|
RU2754219C1 |
| ГИБКИЙ ПРОИЗВОДСТВЕННЫЙ МОДУЛЬ | 1989 |
|
RU2014201C1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
Изобретение относится к промышленному роботу с адаптивными компенсаторами внешних нагрузок, а именно, к компенсатору системы с двумя степенями свободы, включающей вращательный и призматический шарнир. Система адаптивной компенсации промышленного робота содержит по меньшей мере одну пару с двумя степенями свободы, включающую вращательный и призматический шарнир, на которой закреплен компенсатор, выполненный в виде пружин, закреплённых на тросах, перемещающихся по по меньшей мере двум шкивам. Пружины выполнены с пассивно-адаптивной подвижной точкой крепления. Обеспечивается компенсация силы тяжести на призматических соединениях при различной ориентации. 4 з.п. ф-лы, 3 ил.
1. Система адаптивной компенсации промышленного робота, содержащая по меньшей мере одну пару с двумя степенями свободы, включающую вращательный и призматический шарнир, на которой закреплен компенсатор, выполненный в виде пружин, закреплённых на тросах, перемещающихся по по меньшей мере двум шкивам, отличающаяся тем, что пружины выполнены с пассивно-адаптивной подвижной точкой крепления.
2. Система по п.1, отличающаяся тем, что пружины соединены с тросами, закрепленными на штифтово-шлицевом механизме, тросы взаимодействуют со шкивами, один из которых закреплен на передаче рейка-шестерня, при этом шестерня передачи соединена конической передачей с самоблокирующейся червячной передачей, на выходе которой размещен шкив.
3. Система по п.2, отличающаяся тем, что компенсатор вращательного шарнира содержит шкив ременной передачи с ползунком и стойку, на которой размещены пружины, одна из которых соединена с ползунком, размещенным на стойке, при этом вторая пружина жестко закреплена на корпусе.
4. Система по любому из пп.1-3, отличающаяся тем, что компенсатор снабжен штифтово-шлицевым механизмом, соединенным с тросом пружины, обеспечивающим натяжение пружины.
5. Система по любому из пп.1-4, отличающаяся тем, что пружины имеют жесткость, обеспечивающую уравновешивание вращательного и призматического шарнира.
| Пружинный механизм | 1980 |
|
SU932005A1 |
| Устройство вертикального перемещения | 1980 |
|
SU1044591A1 |
| Способ повышения точности перемещений промышленного робота в процессе инкрементального формообразования | 2020 |
|
RU2762693C1 |
| 0 |
|
SU189483A1 | |
| БИОЛОГИЧЕСКИ АКТИВНОЕ ВЕЩЕСТВО (ВАРИАНТЫ) | 1997 |
|
RU2114536C1 |

