Настоящая заявка на патент испрашивает преимущество и приоритет относительно заявки на патент Китая № 202010832729,0, поданной 18 августа 2020 г., описание которой полностью включено в данный документ посредством ссылки как часть настоящей заявки.
Область техники
Настоящее изобретение относится к области медицинских инструментов и, в частности, к механизму ручного тормоза для регулирования скорости и способу регулирования скорости механизма ручного тормоза.
Уровень техники
Ангиографический рентгеновский аппарат является одним из наиболее часто используемых интервенционных устройств в больницах, который обычно используется при интервенционных операциях и лечении сердца, головного мозга, печени, почек, легких и т. д. В процессе интервенционной хирургии или лечения врачам необходимо перемещать оборудование в несколько положений, чтобы всесторонне наблюдать за визуализацией кровеносных сосудов пациентов и точно определять место поражения, скорость перемещения оборудования, необходимого в разных положениях, также различается в разных положениях. Поэтому необходимо разработать устройство, которое может регулировать скорость в зависимости от функциональной структуры, требующей различных скоростей движения.
Однако текущий режим регулирования скорости интервенционного устройства в основном реализуется путем принятия режима настройки программного обеспечения, скорость оборудования в определенном положении устанавливается заранее, и оборудование работает в соответствии с установленной скоростью. Таким образом, скорость относительно фиксирована, и в зависимости от состояния пациента, если врач хочет увеличить или уменьшить скорость устройства в определенном положении, скорость (в соответствии с предварительно разработанной программой) нельзя изменить в любое время, и, следовательно, способ не может соответствовать требованиям врача.
Поэтому разработка механизма ручного тормоза для регулирования скорости является актуальной проблемой, которую должны решить специалисты в данной области техники.
Сущность изобретения
Целью настоящего изобретения является обеспечение механизма ручного тормоза для регулирования скорости для решения проблемы, заключающейся в том, что скорость существующего интервенционного оборудования нельзя изменить в любое время в соответствии с требованиями использования.
Настоящее изобретение обеспечивает механизм ручного тормоза для регулирования скорости, содержащий:
корпус, отличающийся тем, что внутри корпуса определена установочная полость;
кнопку регулирования скорости, отличающуюся тем, что кнопка регулирования скорости шарнирно прикреплена к боковой стенке корпуса;
приводную часть, отличающуюся тем, что установочная полость внутри снабжена приводной частью, которая шарнирно прикреплена к кнопке регулирования скорости;
зубчатую рейку, отличающуюся тем, что зубчатая рейка шарнирно прикреплена к приводной части и может скользить вдоль внутренней стенки установочной полости в горизонтальном направлении после получения усилия нажатия, передаваемого кнопкой регулирования скорости;
энкодер, отличающийся тем, что энкодер закреплен на первой крепежной пластине в установочной полости, зубчатая рейка приводит во вращение шестерню, расположенную в верхней части энкодера, и кодовое значение, выводимое энкодером, изменяется;
возвратную деталь, отличающуюся тем, что эластичный конец возвратной детали расположен внутри кнопки регулирования скорости, а другая сторона возвратной детали закреплена на внутренней стенке установочной полости и используется для сброса кнопки регулирования скорости.
Как видно из приведенного выше технического решения, по сравнению с предшествующим уровнем техники, настоящее изобретение раскрывает механизм ручного тормоза для регулирования скорости, отличающийся тем, что приводная часть нажимается кнопкой регулирования скорости, а затем зубчатая рейка толкается, чтобы привести во вращение верхнюю шестерню энкодера, а внешняя система управления управляет внешним сервоприводом для вращения с разной скоростью в соответствии с различными кодовыми значениями энкодера, так что регулирование скорости реализуется на функциональной структуре, требующей разных скоростей движения, а также удовлетворены требования врачей в интервенционной хирургии или лечении.
Кроме того, корпус включает в себя первый корпус и второй корпус, которые взаимно изогнуты в вертикальном направлении; тем самым облегчается демонтаж и установка этих внутренних компонентов.
Кроме того, приводная часть включает в себя фиксирующее основание, шатун и соединительную пластину; фиксирующее основание прикреплено к верхней части внутренней стороны кнопки регулирования скорости, а соединительная пластина целиком соединена с одним концом зубчатой рейки; два конца шатуна снабжены шарнирными валами в разных направлениях, и два конца шатуна соответственно шарнирно прикреплены к шарнирному отверстию I на фиксирующем основании и шарнирному отверстию II на соединительной пластине; тем самым обеспечивается, что в процессе нажатия или возврата кнопки регулирования скорости шатун соответственно вращается вокруг шарнирного вала в шарнирных отверстиях в неподвижном гнезде и соединительном гнезде и гибко вращается без блокировки.
Кроме того, на внутренней стенке установочной полости закреплена линейная направляющая, соответствующая положению шестерни; зубчатая рейка может скользить по линейной направляющей через фиксированный цельный скользящий блок; тем самым обеспечивается, что зубчатая рейка может перемещаться только вдоль линейной направляющей и что кнопка регулирования скорости толкается и нажимается для изменения кодового значения энкодера.
Кроме того, внутренняя нижняя часть кнопки регулирования скорости шарнирно прикреплена к корпусу, чтобы обеспечить нижнюю точку опоры для кнопки регулирования скорости.
Кроме того, один конец возвратной детали – эластичный конец, а другой конец – закрепленный конец, закрепленный конец снабжен монтажным отверстием, а монтажное отверстие закреплено винтом на внутренней стенке установочной полости;
эластичный конец отогнут вниз вдоль закрепленного конца и упруго контактирует с внутренней нижней частью кнопки регулирования скорости; что позволяет удобно возвращать кнопку регулирования скорости.
Кроме того, механизм ручного тормоза для регулирования скорости также включает в себя кнопку экспозиции, отличающуюся тем, что кнопка экспозиции включает в себя: коробку кнопки экспозиции, кнопочный переключатель и возвратную пружину; коробка кнопки экспозиции частично вставлена в сквозное отверстие, предусмотренное в верхней части корпуса, а ее нижняя часть закреплена в установочной полости второй крепежной пластиной; внутренняя часть коробки кнопки экспозиции снабжена кнопочным переключателем, а провод кнопочного переключателя проходит вниз, соединяясь с проводом энкодера, и выступает из нижней части установочной полости; возвратная пружина закреплена на кнопочном переключателе. Таким образом, кнопка экспозиции и ручной тормоз для регулирования скорости объединены вместе для размещения вне помещения, что позволяет сэкономить место и обеспечивает удобство операции; врач может удобно наблюдать за скоростью работы оборудования за пределами операционной, и уменьшается радиационное повреждение рентгеновскими лучами врача.
Кроме того, нижняя часть корпуса соединена с основанием для крепления. Основание расположено за пределами операционной, а ручной тормоз размещен на компьютерном столе.
Согласно другому аспекту изобретения, обеспечивается способ регулирования скорости ручного тормоза для регулирования скорости, который включает в себя: нажатие на приводную часть кнопкой регулирования скорости, затем толкание зубчатой рейки для приведения во вращение верхней шестерни энкодера для изменения кодового значения энкодера, и управление внешним сервоприводом для вращения с разной скоростью в соответствии с различными кодовыми значениями энкодера для регулирования скорости с помощью внешней системы управления. Таким образом, регулирование скорости осуществляется на функциональной структуре, требующей различной скорости движения, и удовлетворяются требования врачей к использованию в интервенционной хирургии или лечении.
Краткое описание чертежей
Чтобы более четко объяснить варианты осуществления настоящего изобретения или техническую схему в предшествующем уровне техники, ниже приводится краткое описание чертежей, необходимых для использования в описании варианта осуществления или предшествующего уровня техники, и очевидно, что чертежи в нижеследующем описании представляют собой только варианты осуществления настоящего изобретения. Специалистами в данной области техники могут быть получены другие чертежи на основе указанных чертежей без внесения творческого вклада.
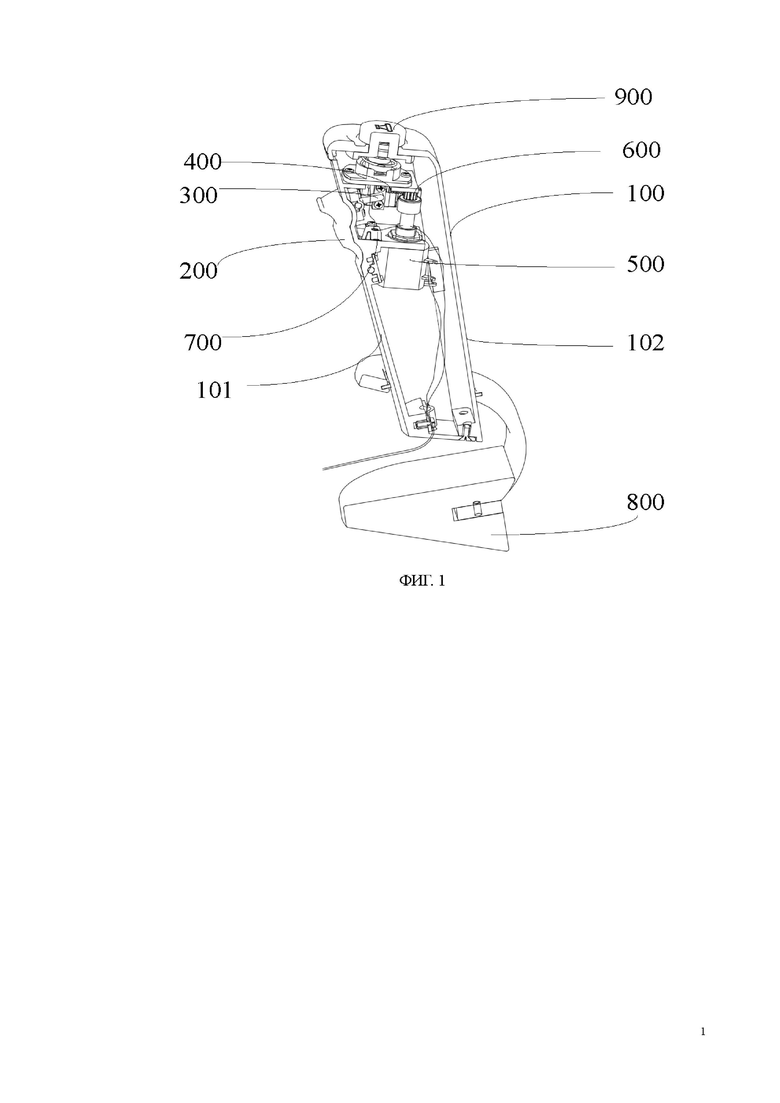
ФИГ. 1 – структурная схема механизма ручного тормоза для регулирования скорости, представленного в настоящем изобретении;
ФИГ. 2 – структурная схема механизма ручного тормоза для регулирования скорости, представленного в настоящем изобретении (корпус не показан);
ФИГ. 3 – частичный вид в разрезе механизма ручного тормоза для регулирования скорости, представленного в настоящем изобретении;
ФИГ. 4 представляет собой структурную схему конструкции возвратной детали;
ФИГ. 5 представляет собой структурную схему конструкции шатуна;
ФИГ. 6 представляет собой схематическое изображение конструкции соединительной пластины и зубчатой рейки;
На чертежах:
100 – корпус, 101 – первый корпус, 102 – второй корпус, 103 – линейная направляющая, 104 – первая крепежная пластина, 105 – вторая крепежная пластина, 200 – кнопка регулирования скорости, 300 – приводная часть, 301 – фиксирующее основание, 302 – шатун, 303 – соединительная пластина, 400 – зубчатая рейка, 500 – энкодер, 600 – шестерня, 700 – возвратная деталь, 701 – эластичный конец, 702 – закрепленный конец, 800 – основание, 900 – кнопка экспозиции, 901 – коробка кнопки экспозиции, 902 – кнопочный переключатель, 903 – возвратная пружина.
Подробное описание вариантов осуществления
Ниже следует подробное описание вариантов осуществления настоящего изобретения, примеры которых проиллюстрированы чертежами, на которых одинаковые или схожие позиции обозначают одинаковые или схожие элементы или элементы с одинаковыми или схожими функциями. Варианты осуществления, описанные ниже со ссылкой на чертежи, являются иллюстративными и предназначены для объяснения настоящего изобретения, но не должны толковаться как ограничения настоящего изобретения.
В описании настоящего изобретения следует понимать, что термины «верхний», «нижний», «передний», «задний», «левый», «правый», «вертикальный», «горизонтальный», «внутренний», «внешний» и т.п. указывают на ориентацию или взаимное расположение на основе того, что показано на чертежах, исключительно для удобства и простоты описания, и не указывают и не подразумевают, что указанные устройства или элементы должны иметь определенную ориентацию, быть сконструированы и работать в определенной ориентации и, следовательно, не должны рассматриваться как ограничение изобретения.
Кроме того, термины «первый» и «второй» используются только в описательных целях и не могут пониматься как указывающие или подразумевающие относительную важность или неявно указывающие на количество указанных технических признаков. Таким образом, признаки, определенные с использованием слов «первый» и «второй», могут явно или неявно включать один или несколько признаков. В описании настоящего изобретения «несколько» означает два или более, если не указано иное.
В настоящем изобретении, если иное не оговорено и не ограничено, термины «установка», «соединение» и «фиксация» следует понимать в широком смысле, например, они могут быть фиксированным соединением, разъемным соединением или интегрированным соединением; могут быть механически соединены или электрически соединены; это может быть прямое соединение или непрямое соединение через промежуточную среду, и это может быть внутренняя связь двух элементов или взаимодействие между двумя элементами. Обычные технические специалисты в данной области могут понять конкретные значения вышеуказанных терминов в настоящем изобретении в соответствии с конкретными ситуациями.
В настоящем изобретении, если не указано иное и не ограничено, первый признак «выше» или «ниже» второго признака может включать прямой контакт между первым и вторым признаком или контакт между первым и вторым признаком вместо прямого контакта, но через другой признак между ними. Кроме того, первый признак «выше» второго признака включает в себя то, что первый признак находится непосредственно выше и наклонно выше второго признака, или просто указывает, что горизонтальная высота первого признака выше, чем у второго признака. Первый признак «ниже» второго признака включает в себя то, что первый признак находится непосредственно ниже и наклонно ниже второго признака, или просто указывает, что горизонтальная высота первого признака меньше, чем у второго признака.
Ссылаясь на ФИГ. 1-2, вариант осуществления изобретения раскрывает механизм ручного тормоза для регулирования скорости, включающий:
корпус 100, отличающийся тем, что внутри корпуса (100) определена установочная полость;
кнопку регулирования скорости 200, отличающуюся тем, что кнопка регулирования скорости 200 шарнирно прикреплена к боковой стенке корпуса 100;
приводную часть 300, отличающуюся тем, что установочная полость внутри снабжена приводной частью 300, которая шарнирно прикреплена к кнопке регулирования скорости 200;
зубчатую рейку 400, отличающуюся тем, что зубчатая рейка 400 шарнирно прикреплена к приводной части 300 и может скользить вдоль внутренней стенки установочной полости в горизонтальном направлении после получения усилия нажатия, передаваемого кнопкой регулирования скорости 200;
энкодер 500, отличающийся тем, что энкодер 500 закреплен на первой крепежной пластине 104 в установочной полости, зубчатая рейка 400 приводит во вращение шестерню 600, расположенную в верхней части энкодера 500, и кодовое значение, выводимое энкодером 500, изменяется;
возвратную деталь 700, отличающуюся тем, что эластичный конец возвратной детали 700 расположен внутри кнопки регулирования скорости (200), а другая сторона возвратной детали 700 закреплена на внутренней стенке установочной полости и используется для сброса кнопки регулирования скорости 200.
Изобретение раскрывает способ регулирования скорости ручного тормоза для регулирования скорости, который включает в себя: нажатие на приводную часть кнопкой регулирования скорости, затем толкание зубчатой рейки для приведения во вращение верхней шестерни энкодера для изменения кодового значения энкодера, и управление внешним сервоприводом для вращения с разной скоростью в соответствии с различными кодовыми значениями энкодера для регулирования скорости с помощью внешней системы управления. Таким образом, регулирование скорости осуществляется на функциональной структуре, требующей различной скорости движения, и удовлетворяются требования врачей к использованию в интервенционной хирургии или лечении.
Предпочтительно корпус 100 включает в себя первый корпус 101 и второй корпус 102, которые взаимно изогнуты в вертикальном направлении. Тем самым облегчается демонтаж и установка внутренних компонентов.
Ссылаясь на ФИГ. 3, приводная часть 300 включает в себя фиксирующее основание 301, шатун 302 и соединительную пластину 303; фиксирующее основание 301 прикреплено к верхней части внутренней стороны кнопки регулирования скорости 200, а соединительная пластина 303 целиком соединена с одним концом зубчатой рейки 400; два конца шатуна 302 снабжены шарнирными валами в разных направлениях; два конца шатуна соответственно шарнирно прикреплены к шарнирному отверстию I на фиксирующем основании 301 и шарнирному отверстию II на соединительной пластине 303. Тем самым обеспечивается, что в процессе нажатия или возврата кнопки регулирования скорости шатун соответственно вращается вокруг шарнирного вала в шарнирных отверстиях в неподвижном гнезде и соединительном гнезде и гибко вращается без блокировки.
Предпочтительно линейная направляющая 103 закреплена на внутренней стенке установочной полости, соответствующей положению шестерни 600; зубчатая рейка 400 может скользить по линейной направляющей 103 через фиксированный цельный скользящий блок. Тем самым обеспечивается, что зубчатая рейка может перемещаться только вдоль линейной направляющей и что кнопка регулирования скорости толкается и нажимается для изменения кодового значения энкодера.
Предпочтительно внутренняя нижняя часть кнопки регулирования скорости шарнирно прикреплена к корпусу, чтобы обеспечить нижнюю точку опоры для кнопки регулирования скорости.
Предпочтительно один конец возвратной детали 700 – эластичный конец 701, а другой конец – закрепленный конец 702, закрепленный конец 702 снабжен монтажным отверстием, а монтажное отверстие закреплено винтом на внутренней стенке установочной полости; эластичный конец 701 отогнут вниз вдоль закрепленного конца 702 и упруго контактирует с внутренней нижней частью кнопки регулирования скорости 200 для облегчения возврата кнопки регулирования скорости.
В другом варианте осуществления настоящего изобретения механизм ручного тормоза для регулирования скорости дополнительно включает в себя кнопку экспозиции 900, отличающуюся тем, что кнопка экспозиции 900 включает в себя: коробку кнопки экспозиции 901, кнопочный переключатель 902 и возвратную пружину 903; коробка кнопки экспозиции 901 частично вставлена в сквозное отверстие, предусмотренное в верхней части корпуса 100, а ее нижняя часть закреплена в установочной полости второй крепежной пластиной 105; внутренняя часть коробки кнопки экспозиции снабжена кнопочным переключателем 902, а провод кнопочного переключателя 902 проходит вниз, соединяясь с проводом энкодера 500, и выступает из нижней части установочной полости; возвратная пружина 903 закреплена на кнопочном переключателе 902. Таким образом, кнопка экспозиции и ручной тормоз для регулирования скорости объединены вместе для размещения вне помещения, что позволяет сэкономить место и обеспечивает удобство операции; врач может удобно наблюдать за скоростью работы оборудования за пределами операционной, и уменьшается радиационное повреждение рентгеновскими лучами врача.
Когда требуется функция экспозиции, верхняя часть коробки кнопки экспозиции нажимается вручную, и кнопка передает усилие на кнопочный переключатель, чтобы принудительно включить кнопочный переключатель, так что кнопочный переключатель срабатывает и отправляет сигнал во внешнюю систему управления для реализации экспозиции. После отпускания кнопка возвращается в исходное положение под действием возвратной пружины.
Предпочтительно нижняя часть корпуса 100 соединена с основанием 800 для крепления, основание расположено за пределами операционной, а ручной тормоз размещен на компьютерном столе.
В настоящем изобретении, когда скорость перемещения оборудования необходимо регулировать, при нажатии кнопки регулирования скорости вручную кнопка регулирования скорости вращается вокруг шарнирного вала, и кнопка регулирования скорости приводит в движение шатун для перемещения вправо и зубчатую рейку для скольжения вправо по линейной направляющей, поскольку зубчатая рейка зацеплена с шестерней, шестерня движется по часовой стрелке, тем самым двигая энкодер по часовой стрелке, и кодовое значение энкодера будет становиться все больше и больше, и энкодер выводит кодовое значение во внешнюю систему управления, тем самым контролируя скорость перемещения устройства, чтобы она становилась все больше и больше. Во время, когда усилие кнопки регулирования скорости вызывает деформацию возвратной детали, после отпускания кнопки регулирования скорости, возвратная деталь прикладывает усилие к кнопке регулирования скорости, чтобы вернуть кнопку регулирования скорости в исходное положение, кнопка регулирования скорости двигает шатун влево, а шатун заставляет зубчатую рейку скользить влево, так как зубчатая рейка зацеплена с шестерней, шестерня движется в направлении против часовой стрелки, тем самым двигая энкодер против часовой стрелки, а затем кодовое значение энкодера становится все меньше и меньше, и энкодер выводит кодовое значение во внешнюю систему управления, так что скорость перемещения управляющего устройства становится все меньше и меньше. Тем самым реализуется функция регулирования скорости перемещения оборудования.
Изобретение также обеспечивает способ регулирования скорости ручного тормоза для регулирования скорости, который включает в себя: нажатие на приводную часть кнопкой регулирования скорости, затем толкание зубчатой рейки для приведения во вращение верхней шестерни энкодера для изменения кодового значения энкодера, и управление внешним сервоприводом для вращения с разной скоростью в соответствии с различными кодовыми значениями энкодера для регулирования скорости с помощью внешней системы управления. Таким образом, регулирование скорости осуществляется на функциональной структуре, требующей различной скорости движения, и удовлетворяются требования врачей к использованию в интервенционной хирургии или лечении.
В описании данного документа ссылка на описание терминов «один вариант осуществления», «некоторые варианты осуществления», «примеры», «конкретные примеры» или «некоторые примеры» означает, что конкретные признаки, структуры, материалы или характеристики, описанные в связи с этим вариантом осуществления или примером, включены по меньшей мере в один вариант осуществления или пример настоящего изобретения. В данном документе схематические выражения вышеуказанных терминов не обязательно относятся к одним и тем же вариантам осуществления или примерам. Кроме того, описанные специфические признаки, структуры, материалы или характеристики могут быть объединены в любом одном или нескольких вариантах осуществления или примерах подходящим образом. Кроме того, специалисты в данной области техники могут объединять и комбинировать различные варианты осуществления или примеры, описанные в данном документе.
Хотя варианты осуществления настоящего изобретения показаны и описаны выше, следует понимать, что вышеописанные варианты осуществления являются иллюстративными и не должны толковаться как ограничивающие изобретение, и что изменения, модификации, замены и вариации вышеописанных вариантов осуществления могут возникать у специалистов в данной области техники в рамках настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2023 |
|
RU2808302C1 |
| ПУСКОВОЙ МЕХАНИЗМ И СШИВАТЕЛЬ | 2019 |
|
RU2778732C1 |
| Машина для чесания меховых шкур | 1975 |
|
SU558940A1 |
| УНИВЕРСАЛЬНЫЙ РОБОТ ДЛЯ ИНТЕРВЕНЦИОННОЙ АНГИОГРАФИЧЕСКОЙ ХИРУРГИИ И ИНТЕРВЕНЦИОННОЙ ТЕРАПЕВТИЧЕСКОЙ ХИРУРГИИ | 2021 |
|
RU2760468C1 |
| МОЩНЫЙ ВЫСОКОСКОРОСТНОЙ МАГНИТНЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2168841C2 |
| Орган ручного управления инвалидной коляской | 1990 |
|
SU1773792A1 |
| МОТОЦИКЛ С ВЫДВИЖНОЙ УСТАНОВКОЙ СО СНАБЖЕННЫМИ ЛЕЗВИЯМИ ЛЫЖАМИ | 2016 |
|
RU2666062C1 |
| МОТОЦИКЛ С АВТОМАТИЧЕСКИМ ОПОРНЫМ КОЛЕСНЫМ УСТРОЙСТВОМ | 2016 |
|
RU2666063C1 |
| Татуировочная машина | 2021 |
|
RU2761294C1 |


Группа изобретений относится к медицинской технике. Механизм ручного тормоза для регулирования скорости перемещения интервенционного оборудования включает: корпус, внутри которого определена установочная полость; кнопку регулирования скорости, шарнирно прикрепленную к боковой стенке корпуса; приводную часть, расположенную внутри установочной полости, шарнирно прикрепленную к кнопке регулирования скорости и содержащую фиксирующее основание, шатун и соединительную пластину. Фиксирующее основание прикреплено с внутренней стороны кнопки регулирования скорости. Соединительная пластина соединена с одним концом зубчатой рейки. Два конца шатуна снабжены шарнирными валами, выполненными с возможностью вращения в разных направлениях и шарнирно установленными в шарнирных отверстиях на фиксирующем основании и на соединительной пластине соответственно. Зубчатая рейка шарнирно прикреплена к приводной части и выполнена с возможностью скольжения вдоль внутренней стенки установочной полости в горизонтальном направлении после получения усилия нажатия, передаваемого кнопкой регулирования скорости. Энкодер закреплен на первой крепежной пластине в установочной полости. Зубчатая рейка выполнена с возможностью приведения во вращение шестерни, расположенной в верхней части энкодера, для изменения кодового значения энкодера. Возвратная деталь имеет эластичный конец, который расположен внутри кнопки регулирования скорости. Другая сторона возвратной детали закреплена на внутренней стенке установочной полости и выполнена с возможностью сброса кнопки регулирования скорости. Раскрыт способ регулирования скорости ручного тормоза для регулирования скорости перемещения интервенционного оборудования. Технический результат состоит в обеспечении возможности изменения скорости интервенционного оборудования в любое время в соответствии с требованиями использования. 2 н. и 6 з.п. ф-лы, 6 ил.
1. Механизм ручного тормоза для регулирования скорости перемещения интервенционного оборудования, включающий в себя:
корпус (100), внутри которого определена установочная полость;
кнопку регулирования скорости (200), шарнирно прикрепленную к боковой стенке корпуса (100);
приводную часть (300), расположенную внутри установочной полости, шарнирно прикрепленную к кнопке регулирования скорости (200) и содержащую фиксирующее основание (301), шатун (302) и соединительную пластину (303), при этом фиксирующее основание (301) прикреплено с внутренней стороны кнопки регулирования скорости (200), соединительная пластина (303) соединена с одним концом зубчатой рейки (400), а два конца шатуна (302) снабжены шарнирными валами, выполненными с возможностью вращения в разных направлениях и шарнирно установленными в шарнирных отверстиях на фиксирующем основании (301) и на соединительной пластине (303) соответственно;
зубчатую рейку (400), шарнирно прикрепленную к приводной части (300) и выполненную с возможностью скольжения вдоль внутренней стенки установочной полости в горизонтальном направлении после получения усилия нажатия, передаваемого кнопкой регулирования скорости (200);
энкодер (500), закрепленный на первой крепежной пластине (104) в установочной полости, зубчатая рейка (400) выполнена с возможностью приведения во вращение шестерни (600), расположенной в верхней части энкодера (500), для изменения кодового значения энкодера (500);
возвратную деталь (700), эластичный конец которой расположен внутри кнопки регулирования скорости (200), а другая сторона возвратной детали (700) закреплена на внутренней стенке установочной полости и выполнена с возможностью сброса кнопки регулирования скорости (200).
2. Механизм по п. 1, отличающийся тем, что корпус (100) содержит первый корпус (101) и второй корпус (102), которые взаимно изогнуты в вертикальном направлении.
3. Механизм по п. 1, отличающийся тем, что линейная направляющая (103) закреплена на внутренней стенке установочной полости, соответствующей положению шестерни (600);
зубчатая рейка (400) выполнена с возможностью скольжения по линейной направляющей (103) через фиксированный цельный скользящий блок.
4. Механизм по п. 1, отличающийся тем, что внутренняя нижняя часть кнопки регулирования скорости (200) шарнирно прикреплена к корпусу (100).
5. Механизм по п. 1, отличающийся тем, что один конец возвратной детали (700) – эластичный конец (701), а другой конец – закрепленный конец (702), при этом закрепленный конец (702) снабжен монтажным отверстием, а монтажное отверстие закреплено винтом на внутренней стенке установочной полости;
эластичный конец (701) отогнут вниз вдоль закрепленного конца (702) и выполнен с возможностью упругого контакта с внутренней нижней частью кнопки регулирования скорости (200).
6. Механизм по любому из пп. 1-5, отличающийся тем, что дополнительно содержит кнопку экспозиции (900), содержащую коробку кнопки экспозиции (901), кнопочный переключатель (902) и возвратную пружину (903);
при этом коробка кнопки экспозиции (901) частично вставлена в сквозное отверстие, предусмотренное в верхней части корпуса (100), а ее нижняя часть закреплена в установочной полости второй крепежной пластиной (105);
внутренняя часть коробки кнопки экспозиции (901) снабжена кнопочным переключателем (902), а провод кнопочного переключателя (902) проходит вниз, соединяясь с проводом энкодера (500), и выступает из нижней части установочной полости;
возвратная пружина (903) закреплена на кнопочном переключателе (902).
7. Механизм по любому из пп. 1-5, отличающийся тем, что нижняя часть корпуса (100) соединена с основанием (800) для крепления.
8. Способ регулирования скорости ручного тормоза для регулирования скорости перемещения интервенционного оборудования с использованием механизма ручного тормоза по любому из пп. 1-7, включающий:
нажатие на приводную часть (300) кнопкой регулирования скорости (200),
толкание зубчатой рейки (400) для приведения во вращение верхней шестерни (600) энкодера (500) для изменения кодового значения энкодера и
управление внешним сервоприводом для вращения с разной скоростью в соответствии с различными кодовыми значениями энкодера для регулирования скорости с помощью внешней системы управления.
| CN 112057091 A, 11.12.2020 | |||
| CN 209032291 U, 28.06.2019 | |||
| CN 203255989 U, 30.10.2013 | |||
| CN 204411425 U, 24.06.2015 | |||
| US 6222902 B1, 24.04.2001 | |||
| ПОДСТАВКА ДЛЯ СУБЪЕКТА ОБСЛЕДОВАНИЯ В СИСТЕМЕ ФОРМИРОВНИЯ ИЗОБРАЖЕНИЙ | 2012 |
|
RU2606586C2 |

