ПЕРЕКРЕСТНАЯ ССЫЛКА НА СВЯЗАННЫЕ ЗАЯВКИ
[0001] Настоящая заявка испрашивает приоритет на основании патентной заявки Китая №. 201910604486.2 под названием «MOTION DATA MONITORING METHOD AND APPARATUS», поданной в Национальное управление интеллектуальной собственности Китая 5 июля 2019 г., которая полностью включена сюда посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Эта заявка относится к области терминалов и, в частности, к способу и аппаратуре мониторинга данных движения.
УРОВЕНЬ ТЕХНИКИ
[0003] С непрерывным развитием коммуникационных технологий все больше электронных устройств (таких как носимые устройства (WD)) вошли в поле нашего зрения. Носимое устройство представляет собой портативное устройство, которое можно носить непосредственно на теле или интегрировать в одежду или аксессуары пользователя.
[0004] Одной функцией носимого устройства является запись процесса движения пользователя. Например, носимые устройства, такие как энергетический браслет или обувь с шагомером, могут быть сконфигурированы для записи таких параметров, как количество шагов передвижения, расстояние и калории, сожженные во время бега.
[0005] Виды спорта, включающие в себя более разнообразные действия, такие как баскетбол, волейбол и паркур, могут включать в себя такие действия, как ходьба, бег трусцой, прыжки и движения в стороны. Однако современные интеллектуальные носимые устройства не могут надлежащим образом мониторить особенности действий, не обеспечивая пользователям более желаемого спортивного опыта.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] Варианты осуществления этой заявки обеспечивают мониторинг данных движения для использования при мониторинге данных движения пользователя в спорте (например, в баскетболе), включающем в себя разнообразные действия в реальном времени, и улучшении пользовательского опыта в спорте.
[0007] Согласно первому аспекту вариант осуществления этой заявки обеспечивает способ мониторинга данных движения. Способ включает в себя: сбор электронным устройством сигнала угловой скорости и сигнала ускорения пользователя; получение упомянутым электронным устройством характеристики формы сигнала угловой скорости на основе сигнала угловой скорости и получение характеристики формы сигнала для сигнала ускорения на основе сигнала ускорения; определение упомянутым электронным устройством характеристики походки пользователя в соответствии с характеристикой формы сигнала для сигнала угловой скорости и характеристикой формы сигнала для сигнала ускорения, где характеристика походки включает в себя продолжительность полета ступни пользователя от отрыва от земли до касания земли; и определение упомянутым электронным устройством данных движения в соответствии с характеристикой походки, где данные движения включают в себя высоту прыжка.
[0008] На основе способа мониторинга данных движения, представленного в этой заявке, электронное устройство может собирать сигнал угловой скорости и сигнал ускорения пользователя и обрабатывать сигнал угловой скорости и сигнал ускорения для получения данных движения пользователя. Сигнал угловой скорости и сигнал ускорения пользователя могут быть собраны с помощью шестиосевого датчика. Затраты низкие, а синхронная во времени передача и объединение данных для множества блоков датчиков не требуются. Данные движения (например, высота прыжка) пользователя в различных видах спорта (например, в баскетболе) можно мониторить в реальном времени, а пользовательский опыт в спорте можно улучшить.
[0009] В возможной реализации сбор электронным устройством сигнала угловой скорости и сигнала ускорения пользователя включает в себя: сбор электронным устройством сигнала угловой скорости и сигнала ускорения ступни или ноги пользователя. Ступня пользователя включает в себя такие части, как подъем ступни и подошва ступни пользователя. Нога пользователя включает в себя такие части, как лодыжка, икра, колено и бедро пользователя.
[0010] В возможной реализации определение электронным устройством данных движения в соответствии с характеристикой походки включает в себя: определение электронным устройством первого компонента высоты прыжка в соответствии с продолжительностью полета; определение электронным устройством второй составляющей высоты прыжка в соответствии с интегрированием сигнала ускорения по продолжительности полета; и определение электронным устройством высоты прыжка в соответствии с первой составляющей и второй составляющей. В этом варианте осуществления этой заявки высота прыжка определяется с использованием продолжительности полета и интегрирования сигнала ускорения по продолжительности полета, что позволяет повысить точность высоты прыжка.
[0011] В возможной реализации определение электронным устройством первой составляющей высоты прыжка в зависимости от продолжительности полета включает в себя:  =
=  , где представляет собой первую составляющую,
, где представляет собой первую составляющую,  представляет собой продолжительность полета, а g представляет собой ускорение свободного падения; определение электронным устройством второй составляющей высоты прыжка в соответствии с интегрированием ускорения по продолжительности полета включает в себя:
представляет собой продолжительность полета, а g представляет собой ускорение свободного падения; определение электронным устройством второй составляющей высоты прыжка в соответствии с интегрированием ускорения по продолжительности полета включает в себя:  =
=  , где представляет собой вторую составляющую, представляет продолжительность полета,
, где представляет собой вторую составляющую, представляет продолжительность полета,  представляет собой начальный момент продолжительности полета, k - параметр корректировки, а
представляет собой начальный момент продолжительности полета, k - параметр корректировки, а  представляет собой составляющую сигнала ускорения пользователя в направлении оси Z локальной горизонтальной системы координат; и определение электронным устройством высоты прыжка в соответствии с первой составляющей и второй составляющей включает в себя: когда |-| <
представляет собой составляющую сигнала ускорения пользователя в направлении оси Z локальной горизонтальной системы координат; и определение электронным устройством высоты прыжка в соответствии с первой составляющей и второй составляющей включает в себя: когда |-| <  , H =
, H =  *(
*( ), где порог это предустановленный порог, H - высота прыжка.
), где порог это предустановленный порог, H - высота прыжка.
[0012] В возможной реализации определение электронным устройством характеристики походки пользователя в соответствии с характеристикой формы сигнала для сигнала угловой скорости и характеристикой формы сигнала для сигнала ускорения включает в себя: определение электронным устройством характеристики походки пользователя в соответствии с характеристикой формы сигнала для сигнала угловой скорости, характеристикой формы сигнала для сигнала ускорения и матрицей углов пространственного положения, где матрица углов пространственного положения определяется в соответствии с сигналом угловой скорости и сигналом ускорения. Матрица углов пространственного положения включает в себя угол несущей системы координат электронного устройства относительно локальной горизонтальной системы координат за период времени и может использоваться для представления характеристики пространственного положения пользователя. Следовательно, когда действие пользователя изменяется относительно сложно или быстро, действие пользователя может быть дополнительно распознано в соответствии с матрицей углов пространственного положения. Таким образом, данные движения могут быть определены более точно.
[0013] В возможной реализации способ дополнительно включает в себя: построение электронным устройством матрицы корректировки углов пространственного положения в соответствии с предустановленным условием, где предустановленное условие включает в себя предустановку скорости ступни пользователя до отрыва от земли на 0 и смещение в вертикальном направлении на 0 и предустановку скорости ступни пользователя после касания земли на 0 и смещение в вертикальном направлении на 0; и корректировку электронным устройством матрицы углов пространственного положения в соответствии с матрицей корректировки углов пространственного положения. Таким образом, температурный дрейф и временной дрейф из-за датчика гироскопа и датчика ускорения могут быть эффективно устранены.
[0014] В возможной реализации корректировка электронным устройством матрицы углов пространственного положения в соответствии с матрицей корректировки углов пространственного положения включает в себя:
 , где
, где
C =  ;
;
 ,
,  ,
,  ;
;
 , и
, и
 , где
, где
C представляет матрицу корректировки углов пространственного положения,  представляет матрицу углов пространственного положения,
представляет матрицу углов пространственного положения,  представляет скорректированную матрицу углов пространственного положения, α, β и γ представляют собой соответственно углы поворота в направлении оси x, направлении оси y и направление оси z в локальной горизонтальной системе координат, vx, vy и vz - соответственно составляющие скорости в направлении оси x, направлении оси y и направлении оси z, Hz - смещение в направлении оси z, S - смещение ступни пользователя после отрыва от земли и до касания земли,
представляет скорректированную матрицу углов пространственного положения, α, β и γ представляют собой соответственно углы поворота в направлении оси x, направлении оси y и направление оси z в локальной горизонтальной системе координат, vx, vy и vz - соответственно составляющие скорости в направлении оси x, направлении оси y и направлении оси z, Hz - смещение в направлении оси z, S - смещение ступни пользователя после отрыва от земли и до касания земли,  временной интервал от отрыва от земли ступни пользователя до касания земли.
временной интервал от отрыва от земли ступни пользователя до касания земли.
[0015] В возможной реализации данные движения дополнительно включают в себя по меньшей мере одно из расстояния передвижения, количество шагов и скорость передвижения пользователя. Данные движения могут дополнительно включать в себя сердцебиение, температуру тела, потребление калорий и т.п. пользователя. В данной заявке это однозначно не ограничено.
[0016] В возможной реализации способ дополнительно включает в себя: выполнение электронным устройством корректировки нулевой скорости в соответствии с моментом времени локального минимального значения скорости движения во временном интервале от касания земли до отрыва от земли; и/или выполнение электронным устройством корректировки расстояния в соответствии с моментом времени локального минимального значения смещения в вертикальном направлении в интервале времени от касания земли до отрыва от земли. Таким образом, температурный дрейф и временной дрейф из-за датчика гироскопа и датчика ускорения могут быть эффективно устранены.
[0017] В возможной реализации способ дополнительно включает в себя: выполнение электронным устройством классификации действий в соответствии с характеристикой формы сигнала для сигнала угловой скорости, характеристикой формы сигнала для сигнала ускорения и данными движения, где результат классификации действия включает в себя по меньшей мере одно из вертикального прыжка, прыжка с разбега и боковых передвижений. Таким образом, пользователь может узнать более четкий статус движения пользователя на основе результата классификации действий, чтобы можно было улучшить взаимодействие с пользователем.
[0018] В возможной реализации способ дополнительно включает в себя: выполнение электронным устройством сопоставления шаблонов данных движения и данных базы данных и вывод классификации персонажа и/или персонального тега (метки) пользователя. Это повышает удовольствие от спорта для пользователя и может улучшить пользовательский опыт.
[0019] Согласно второму аспекту вариант осуществления этой заявки обеспечивает электронное устройство. Электронное устройство включает в себя: блок сбора, выполненный с возможностью сбора сигнала угловой скорости и сигнала ускорения пользователя; блок получения, сконфигурированный для получения характеристики формы сигнала для сигнала угловой скорости на основе упомянутого сигнала угловой скорости и получения характеристики формы сигнала для сигнала ускорения на основе упомянутого сигнала ускорения; и блок определения, сконфигурированный для определения характеристики походки пользователя в соответствии с характеристикой формы сигнала для сигнала угловой скорости и характеристикой формы сигнала для сигнала ускорения, где характеристика походки включает в себя продолжительность полета от отрыва от земли ступни пользователя до касания земли; и блок определения дополнительно сконфигурирован для определения данных движения в соответствии с характеристикой походки, и при этом данные движения включают в себя высоту прыжка.
[0020] В возможной реализации блок сбора выполнен с возможностью сбора сигнала угловой скорости и сигнала ускорения ступни или ноги пользователя.
[0021] В возможной реализации блок определения выполнен с возможностью: определять первую составляющую высоты прыжка в соответствии с продолжительностью полета; определять вторую составляющую высоты прыжка в соответствии с интегрированием сигнала ускорения по продолжительности полета; и определять высоту прыжка в соответствии с первой составляющей и второй составляющей.
[0022] В возможной реализации 12*g∆t2 =  , где Ht представляет собой первую составляющую, ∆t представляет собой продолжительность полета, а g представляет собой ускорение свободного падения, = , где Ha представляет вторую составляющую, ∆t представляет продолжительность полета, t0 представляет собой начальный момент продолжительности полета, k - параметр корректировки, а accz представляет собой составляющую сигнала ускорения пользователя в направлении оси Z локальной горизонтальной системы координат; и когда |-| < , H = *(), где порог ∆H - предустановленный порог, H - высота прыжка.
, где Ht представляет собой первую составляющую, ∆t представляет собой продолжительность полета, а g представляет собой ускорение свободного падения, = , где Ha представляет вторую составляющую, ∆t представляет продолжительность полета, t0 представляет собой начальный момент продолжительности полета, k - параметр корректировки, а accz представляет собой составляющую сигнала ускорения пользователя в направлении оси Z локальной горизонтальной системы координат; и когда |-| < , H = *(), где порог ∆H - предустановленный порог, H - высота прыжка.
[0023] В возможной реализации блок определения сконфигурирован для определения характеристики походки пользователя в соответствии с характеристикой формы сигнала для сигнала угловой скорости, характеристикой формы сигнала для сигнала ускорения и матрицей углов пространственного положения, где матрица углов пространственного положения определяется в соответствии с сигналом угловой скорости и сигналом ускорения.
[0024] В возможной реализации блок определения дополнительно сконфигурирован для: построения матрицы корректировки углов пространственного положения в соответствии с предустановленным условием, где предустановленное условие включает в себя предустановку скорости ступни пользователя до отрыва от земли на 0 и смещения в вертикальном направлении на 0 и предустановку скорости ступни пользователя после касания земли на 0, а перемещение в вертикальном направлении на 0; и корректировку матрицы углов пространственного положения в соответствии с матрицей корректировки углов пространственного положения.
[0025] В возможной реализации , где
C = ;
, , ;
, и
, где
C представляет матрицу корректировки углов пространственного положения, представляет матрицу углов пространственного положения, представляет скорректированную матрицу углов пространственного положения, α, β и γ представляют собой соответственно углы поворота в направлении оси x, направлении оси y и направлении оси z в локальной горизонтальной системе координат, vx, vy и vz - соответственно составляющие скорости в направлении оси x, направлении оси y и направлении оси z, Hz - смещение в направлении оси z, S - смещение ступни пользователя после отрыва от земли и до касания земли, - временной интервал от отрыва от земли ступни пользователя до касания земли.
[0026] В возможной реализации данные движения дополнительно включают в себя по меньшей мере одно расстояния передвижения, количества шагов и скорости передвижения пользователя.
[0027] В возможной реализации блок определения дополнительно выполнен с возможностью: выполнять корректировку нулевой скорости в соответствии с моментом времени локального минимального значения скорости движения во временном интервале от касания земли до отрыва от земли; и/или выполнять корректировку расстояния в соответствии с моментом времени локального минимального значения смещения в вертикальном направлении в интервале времени от касания земли до отрыва от земли.
[0028] В возможной реализации блок определения дополнительно сконфигурирован для выполнения классификации действий в соответствии с характеристикой формы сигнала для сигнала угловой скорости, характеристикой формы сигнала для сигнала ускорения и данными движения, где результат классификации действий включает в себя по меньшей мере одно из вертикального прыжка, прыжка с разбега и бокового передвижения.
[0029] В возможной реализации блок определения дополнительно сконфигурирован для выполнения сопоставления шаблонов данных движения и данных базы данных и вывода классификации персонажа и/или персонального тега пользователя.
[0030] Технические эффекты второго аспекта и различные возможные реализации второго аспекта относятся к техническим эффектам первого аспекта и различным возможным реализациям первого аспекта. Подробности не описаны здесь снова.
[0031] В соответствии с третьим аспектом вариант осуществления этой заявки обеспечивает машиночитаемый носитель данных, содержащий инструкции, где инструкции при запуске на компьютере заставляют компьютер выполнять любой из способов, предусмотренных в первом аспекте.
[0032] В соответствии с четвертым аспектом вариант осуществления этой заявки обеспечивает компьютерный программный продукт, включающий в себя инструкции, где инструкции при запуске на компьютере заставляют компьютер выполнять любой из способов, предусмотренных в первом аспекте.
[0033] В соответствии с пятым аспектом вариант осуществления этой заявки обеспечивает систему микросхем. Система микросхем включает в себя процессор и может дополнительно включать в себя память. Система микросхем сконфигурирована для выполнения любого из способов, предусмотренных в первом аспекте. Система микросхем может включать в себя микросхемы или может включать в себя микросхемы и другие дискретные устройства.
[0034] В соответствии с шестым аспектом вариант осуществления этой заявки дополнительно предоставляет аппаратуру. Аппаратура может быть обрабатывающим устройством, электронным устройством или микросхемой. Аппаратура включает в себя процессор, сконфигурированный для выполнения любого из способов, предусмотренных в первом аспекте. Аппаратура может дополнительно включать в себя память, сконфигурированную для хранения программных инструкций и данных. Память может быть памятью, встроенной в устройство, или внешней памятью, расположенной вне устройства. Память соединена с процессором. Процессор может вызывать и выполнять программные инструкции, хранящиеся в памяти, для реализации любого из способов, предусмотренных в первом аспекте. Аппаратура может дополнительно включать в себя интерфейс связи. Интерфейс связи используется для связи аппаратуры с другими устройствами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
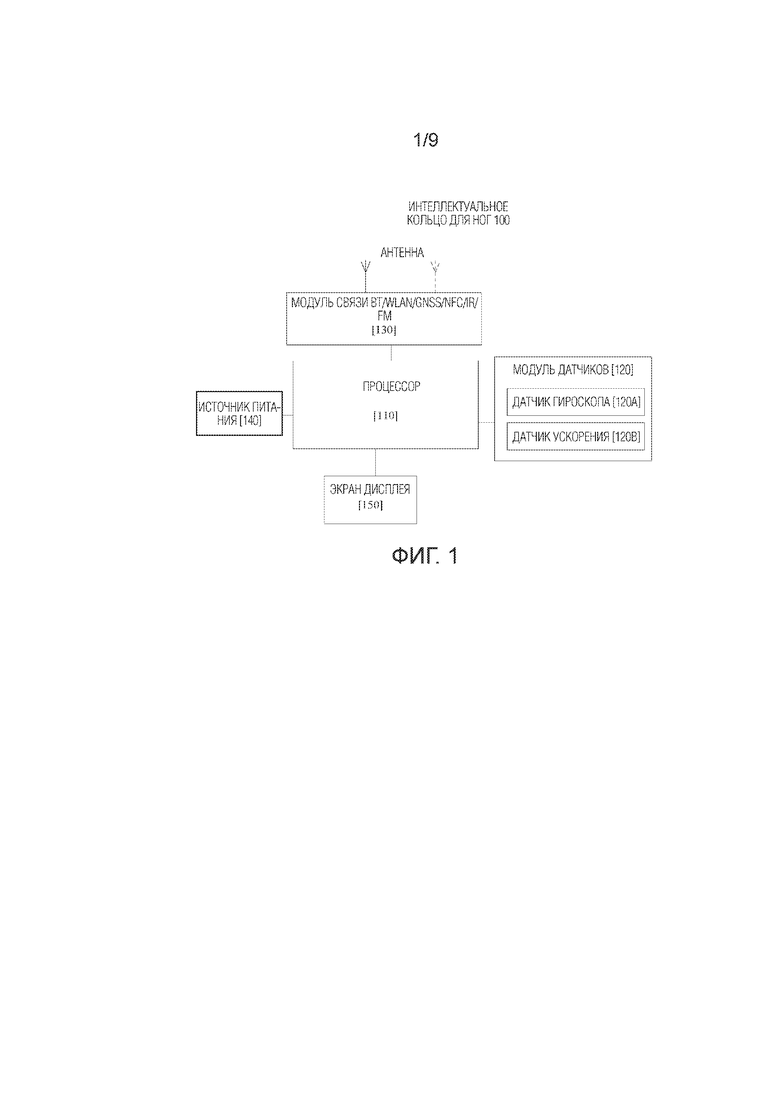
[0035] Фиг. 1 - схематическая структурная диаграмма электронного устройства согласно варианту осуществления этой заявки;
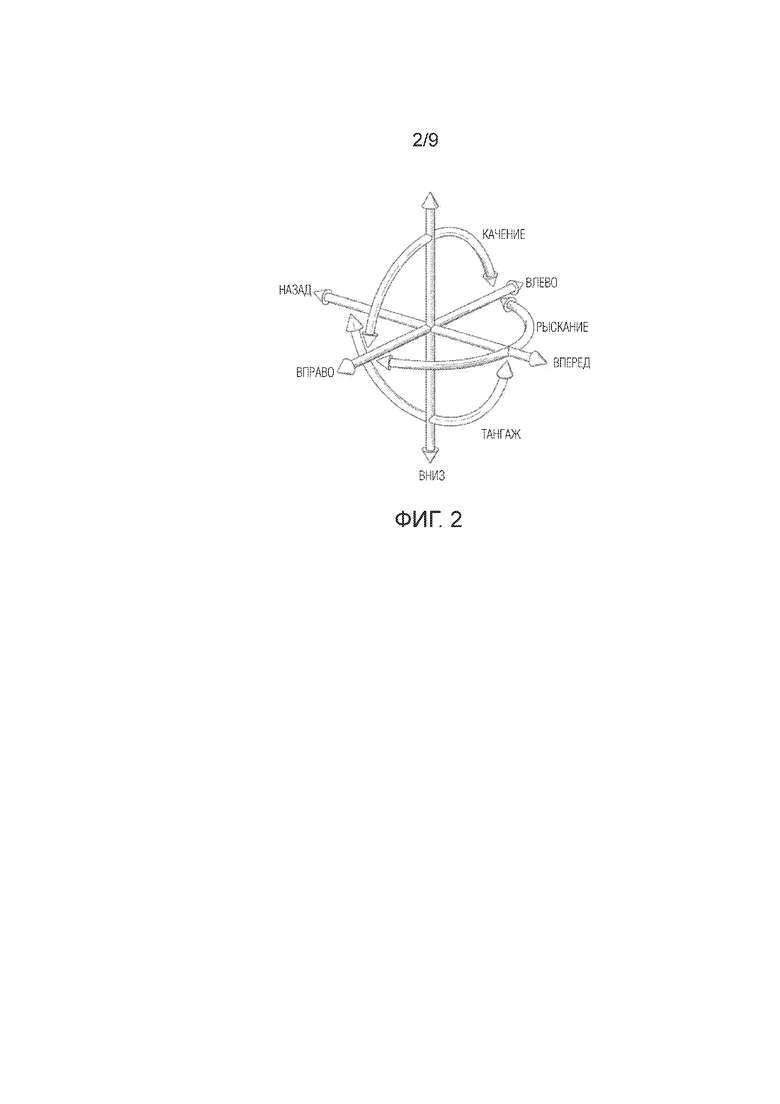
[0036] Фиг. 2 представляет собой схематическую диаграмму углов крена, углов тангажа и углов рыскания в соответствии с вариантом осуществления этой заявки;
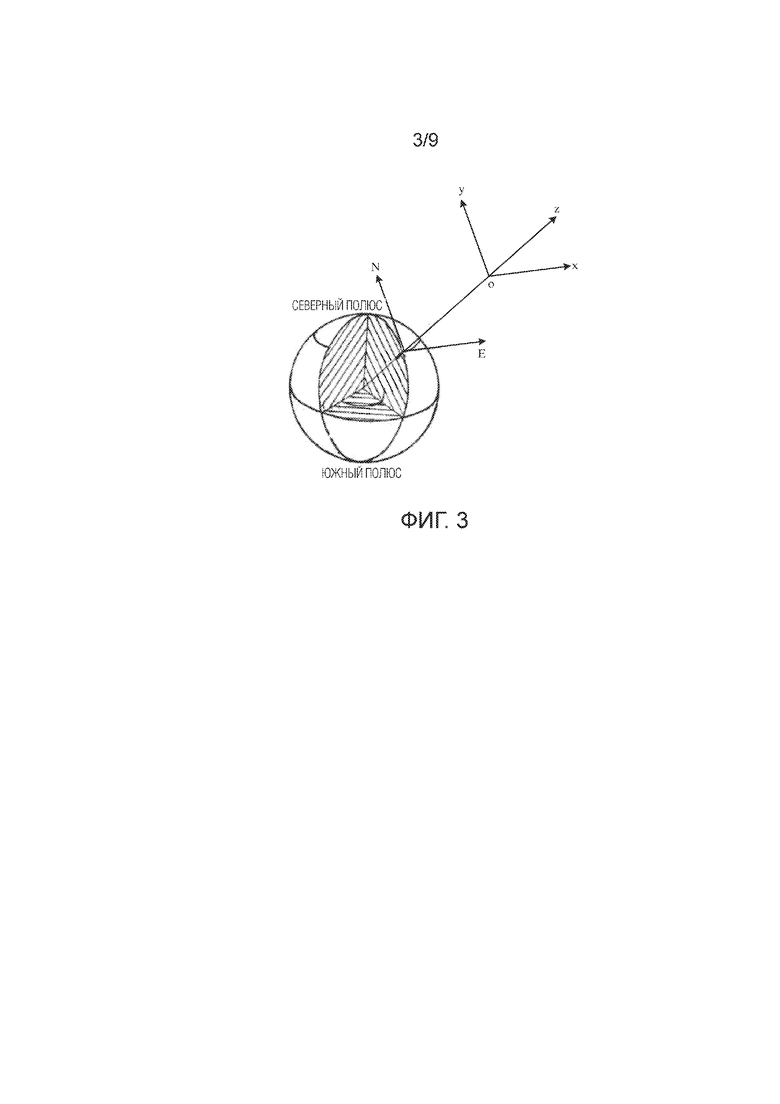
[0037] Фиг. 3 представляет собой схематическую диаграмму локальной горизонтальной системы координат согласно варианту осуществления этой заявки;
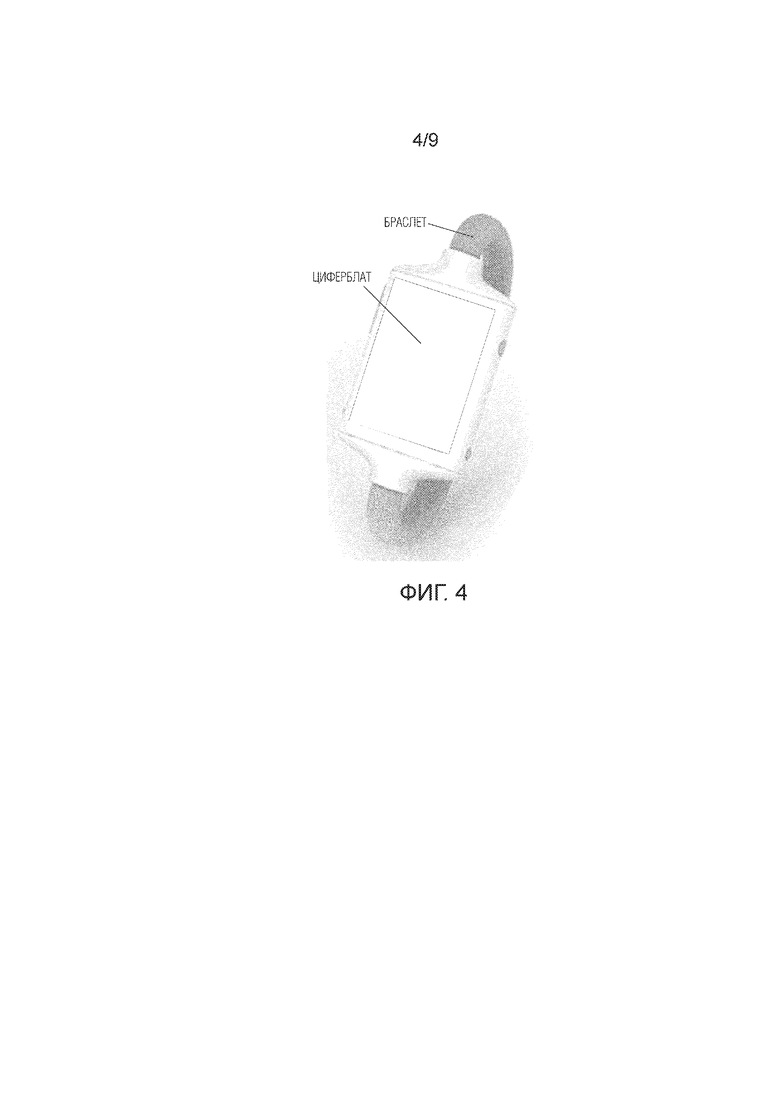
[0038] Фиг. 4 представляет собой схематическую диаграмму формы продукта электронного устройства в соответствии с вариантом осуществления этой заявки;
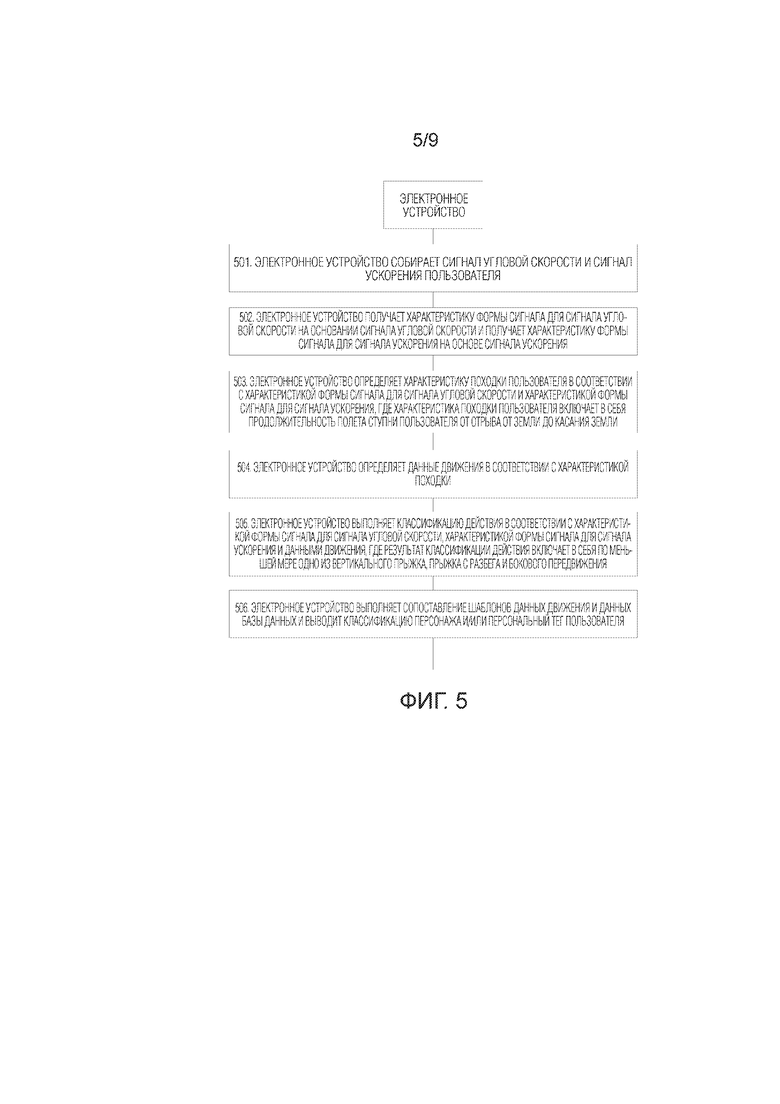
[0039] Фиг. 5 представляет собой блок-схему способа, применимого для мониторинга данных движения согласно варианту осуществления этой заявки;
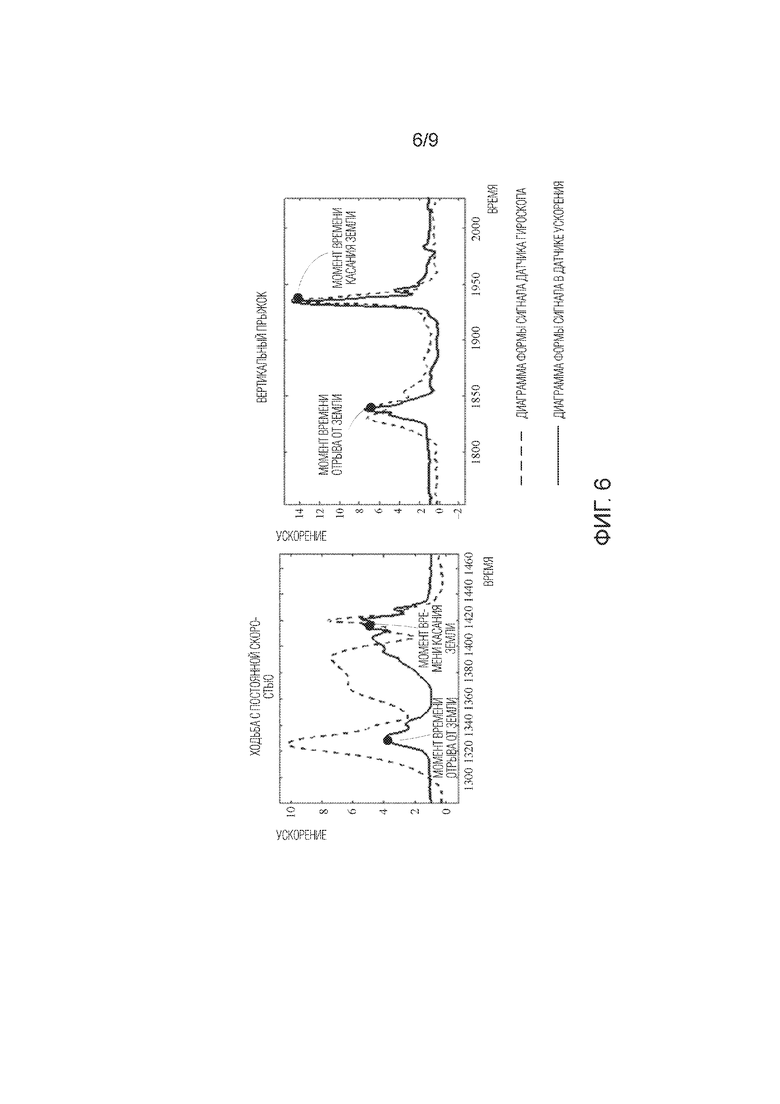
[0040] Фиг. 6 - схематическая диаграмма формы сигнала в датчике гироскопа и диаграмма формы сигнала в датчике ускорения во время ходьбы с постоянной скоростью и вертикального прыжка согласно варианту осуществления этой заявки;
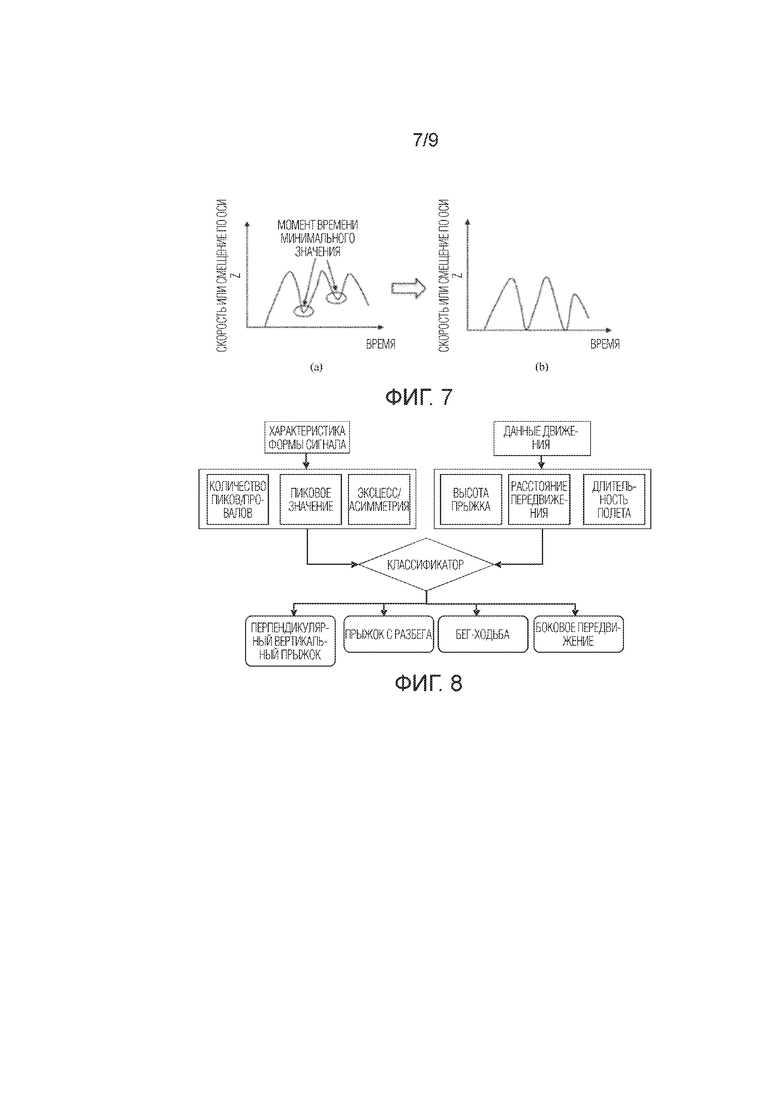
[0041] Фиг. 7 - схематическая диаграмма корректировки скорости или смещения по оси Z в соответствии с вариантом осуществления этой заявки;
[0042] Фиг. 8 представляет собой блок-схему последовательности операций классификации и распознавания типов действий с использованием классификатора на основе соответствующих характеристик форм сигнала и данных движения датчика гироскопа и датчика ускорения согласно варианту осуществления этой заявки;
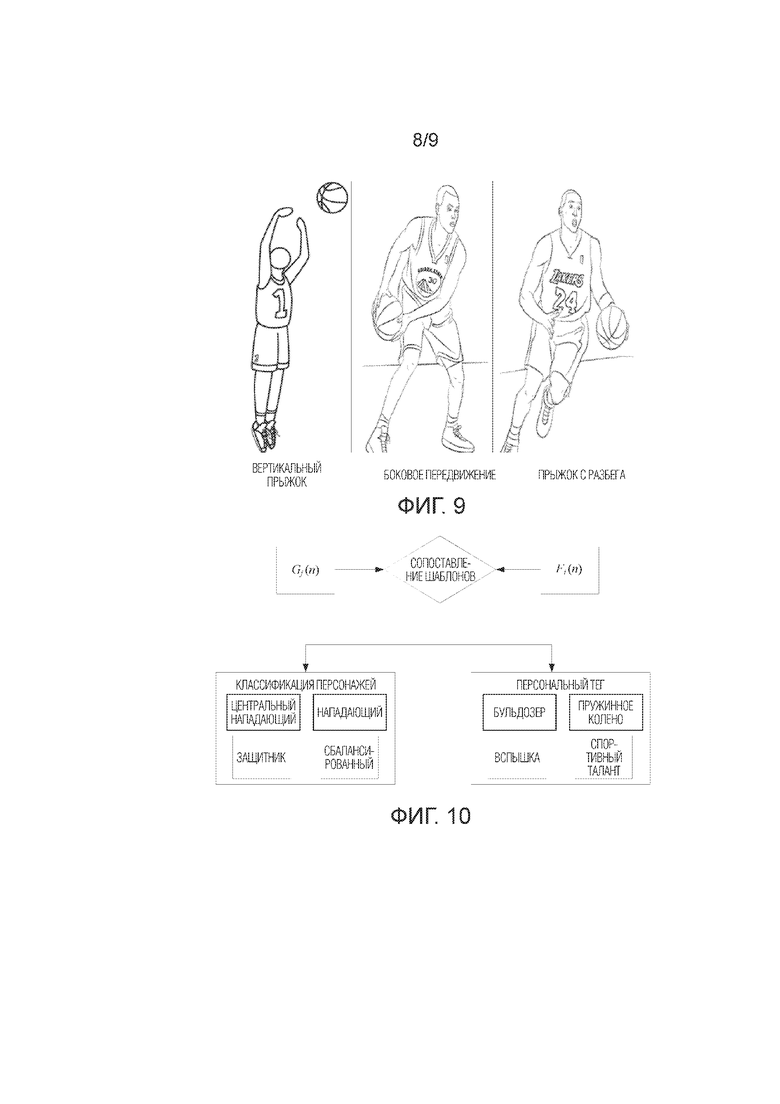
[0043] Фиг. 9 представляет собой схематическое изображение вертикального прыжка, прыжка с разбега и бокового передвижения в соответствии с вариантом осуществления этой заявки;
[0044] Фиг. 10 представляет собой блок-схему сопоставления шаблонов в соответствии с вариантом осуществления этой заявки; и
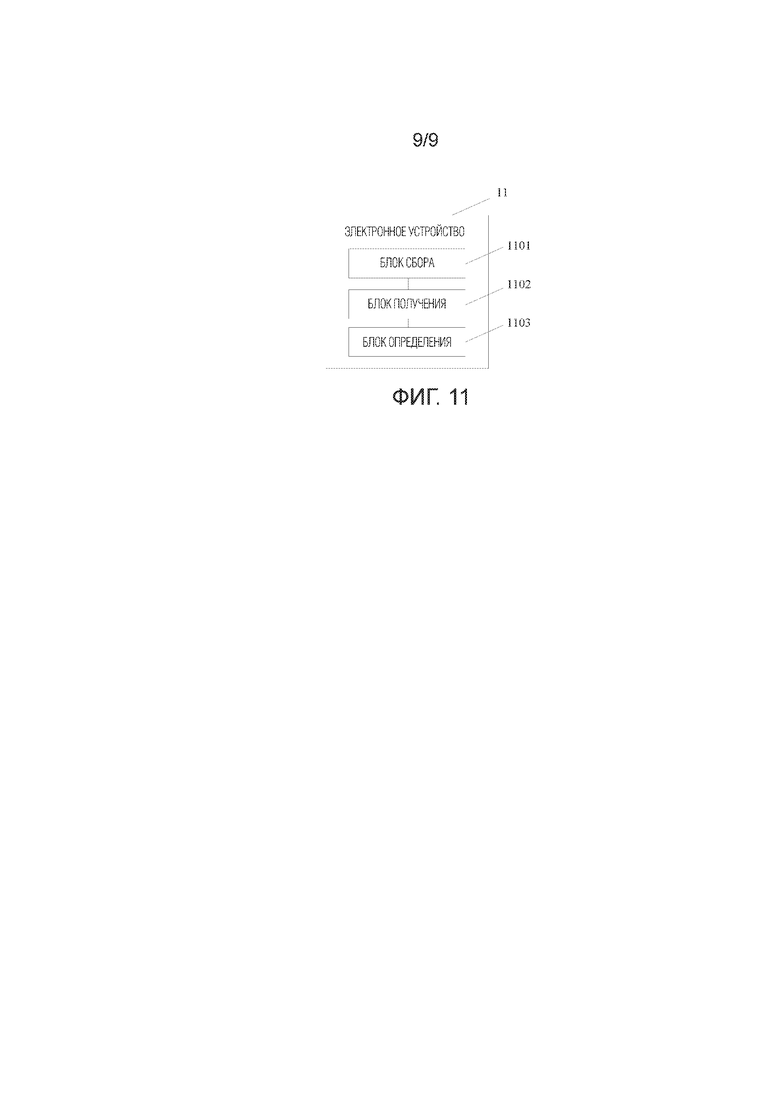
[0045] Фиг. 11 представляет собой схематическую структурную схему другого электронного устройства в соответствии с вариантом осуществления этой заявки.
Описание вариантов осуществления
[0046] Технические решения в вариантах осуществления настоящей заявки описаны ниже со ссылкой на прилагаемые чертежи в вариантах осуществления настоящей заявки. В описаниях данной заявки, если не указано иное, «по меньшей мере один» относится к одному или более, а «множество» относится к двум или более. Кроме того, чтобы облегчить четкое описание технических решений в вариантах осуществления этой заявки, такие слова, как «первый» и «второй», используются в вариантах осуществления этой заявки для различения одних и тех же объектов или подобных объектов, функции и цели которых в основном одинаковы. Специалист в данной области может понять, что такие слова, как «первый» и «второй», не ограничивают количество и последовательность реализации, а такие термины, как «первый» и «второй», не указывают на определенное различие.
[0047] Варианты осуществления этой заявки обеспечивают способ мониторинга данных движения. Способ применяется к сценариям мониторинга данных движения для различных видов спорта, таких как баскетбол, волейбол, бадминтон, прыжки в длину, прыжки в высоту, бег с препятствиями и паркур. Данные движения могут включать в себя продолжительность полета, высоту прыжка, количество прыжков, расстояние передвижения, количество шагов, скорость передвижения и т.п.
[0048] Фиг. 1 - схематическая структурная диаграмма электронного устройства согласно варианту осуществления этой заявки. Электронное устройство может быть, в частности, интеллектуальным кольцом 100 для ног. Интеллектуальное кольцо 100 для ног может включать в себя процессор 110, модуль 120 датчиков, модуль 130 связи, источник 140 питания, экран 150 дисплея и т.п. Модуль датчиков может включать в себя датчик 120А гироскопа, датчик 120В ускорения и т.п.
[0049] Структура, показанная в вариантах осуществления настоящего изобретения, не накладывает ограничений на интеллектуальное кольцо 100 для ног. Интеллектуальное кольцо для ног может включать в себя больше или меньше компонентов, чем показано на рисунке, или некоторые компоненты могут быть объединены, или некоторые компоненты могут быть разделены, или может использоваться другое развертывание компонентов. Компоненты, показанные на фигуре, могут быть реализованы с помощью аппаратных средств, программного обеспечения или комбинации программного и аппаратного обеспечения.
[0050] Процессор 110 может включать в себя один или более блоков обработки. Например, процессор 110 может включать в себя процессор приложений (application processor, AP), процессор модема, блок обработки графики (graphics processing unit, GPU), процессор сигналов изображения (image signal processor, ISP), контроллер, память, видеокодек, процессор цифровых сигналов (digital signal processor, DSP), процессор основной полосы частот и/или блок обработки нейронной сети (neural-network processing unit, NPU). Различные блоки обработки могут быть независимыми компонентами или могут быть интегрированы в один и тот же процессор.
[0051] Контроллер может быть объектом принятия решений, который направляет различные компоненты интеллектуального кольца 100 для ног, чтобы они работали согласованно в соответствии с инструкциями. Контроллер является нейронным центром и центром управления интеллектуальным кольцом 100 для ног. Контроллер генерирует сигнал управления операцией в соответствии с кодом операции инструкции и сигналом синхронизации и завершает управление получением и выполнением инструкций.
[0052] В процессоре 110 может быть дополнительно размещена память для хранения инструкций и данных. В некоторых вариантах осуществления память в процессоре представляет собой кэш-память. Память может хранить инструкции или данные, только что использованные или повторно используемые процессором. Если процессору необходимо снова использовать инструкции или данные, процессор может напрямую вызывать инструкции или данные из памяти, предотвращается повторный доступ, а время ожидания процессора сокращается, что повышает эффективность системы.
[0053] Датчик 120A гироскопа может быть сконфигурирован для определения пространственного положения движения интеллектуального кольца 100 для ног. В некоторых вариантах осуществления датчик гироскопа может быть сконфигурирован для определения угловых скоростей интеллектуального кольца 100 для ног по трем осям (то есть оси x, оси y и оси z) локальной горизонтальной системы координат. Следовательно, датчик гироскопа также может называться трехосевым гироскопом. Как показано на фиг. 2, датчик гироскопа может воспринимать всестороннюю динамическую информацию, такую как наклон вверх и вниз, наклон вперед и назад, а также наклон влево и вправо. Угол пространственного положения интеллектуального кольца для ног означает внутренний угол между несущей системой координат и локальной горизонтальной системой координат. Угол пространственного положения может быть представлен тремя углами: углом крена, углом тангажа и углом рыскания. Датчик гироскопа может использоваться для защиты от сотрясений при фотографировании. Например, когда нажимается затвор, датчик гироскопа отслеживает угол сотрясения интеллектуального кольца 100 для ног и вычисляет на основе углов расстояние, которое необходимо компенсировать модулем объектива. Следовательно, объектив может быть перемещен в обратном направлении, чтобы противодействовать сотрясению интеллектуального кольца 100 для ног, тем самым обеспечивая защиту от сотрясения. Датчик гироскопа может быть дополнительно использован для навигации и сценария соматосенсорной игры.
[0054] Системой координат датчика гироскопа является локальная горизонтальная система координат. Как показано на фиг. 3 точка отсчета О локальной горизонтальной системы координат расположено в центре масс носителя (то есть устройства, включающего в себя датчик гироскопа, например, электронного устройства 100), ось x направлена на восток ( E) вдоль локальной широты, ось y направлена на север (N) вдоль локальной долготы, а ось z перпендикулярна локальной горизонтальной плоскости, направлена вверх вдоль локальной географической вертикали и образует правостороннюю прямоугольную систему координат с осью x и осью y. Плоскость, образованная осью x и осью y, является локальной горизонтальной плоскостью, а плоскость, образованная осью y и осью z, является плоскостью локальной долготы . Следовательно, можно понять, что система координат датчика гироскопа следующая. В качестве точки отсчета O используется датчик гироскопа, в качестве оси x используется ось, направленная на восток вдоль локальной широты, в качестве оси y используется ось, направленная на север вдоль локальной долготы, а ось, направленная вверх (то есть направление, противоположное географической вертикали) вдоль локальной географической вертикали используется в качестве оси z.
[0055] Датчик 120B ускорения может мониторить ускорения интеллектуального кольца 100 для ног во всех направлениях (то есть по оси x, оси y и оси z локальной горизонтальной системы координат). Датчик ускорения также можно назвать трехосевым ускорителем. Датчик ускорения может мониторить величину и направление силы тяжести, когда интеллектуальное кольцо 100 для ног неподвижно. Датчик ускорения можно дополнительно использовать для распознавания положения терминала, переключения между горизонтальным и вертикальным экраном и в таких приложениях, как шагомер.
[0056] Комбинацию трехосного ускорителя и трехосного гироскопа можно назвать шестиосевым датчиком.
[0057] Модуль 130 связи может предоставлять решения беспроводной связи, применяемые к интеллектуальному кольцу 100 для ног, в том числе беспроводную локальную сеть (wireless local area network, WLAN) (например, беспроводную точность (Wireless Fidelity, Wi-Fi)) и Bluetooth, глобальную навигационную спутниковую систему (global navigation satellite system, GNSS), частотную модуляцию (frequency modulation, FM), технологию связи ближнего поля (near field Communication, NFC), инфракрасную технологию (infrared, ИК) и т.п. Модуль 130 связи может быть одним или несколькими компонентами, в которые встроен по меньшей мере один модуль обработки связи. Модуль связи принимает электромагнитную волну через антенну, выполняет частотную модуляцию и фильтрацию сигнала электромагнитной сигнала и отправляет обработанный сигнал в процессор. Модуль 130 связи может дополнительно принимать подлежащий отправке сигнал от процессора, выполнять частотную модуляцию и усиление сигнала и преобразовывать сигнал в электромагнитную волну для излучения через антенну.
[0058] Функция отображения интеллектуального кольца 100 для ног достигается за счет использования GPU, экрана 150 дисплея, процессора приложений и т.п. GPU - это микропроцессор для обработки изображений, подключенный к экрану дисплея и процессору приложений. Графический процессор сконфигурирован для выполнения математических и геометрических вычислений и рендеринга (визуализации) графики. Процессор 110 может включать в себя один или несколько графических процессоров, сконфигурированных для выполнения программных инструкций для создания или изменения отображаемой информации.
[0059] Экран 150 дисплея сконфигурирован для отображения изображения, видео и т. Экран дисплея включает в себя панель дисплея. Панель дисплея может представлять собой жидкокристаллический дисплей (liquid crystal display, LCD), органический светоизлучающий диод (organic light-emitting diode, OLED), органический светоизлучающий диод с активной матрицей (active-matrix organic light emitting diode, AMOLED), Miniled, MicroLed, Micro-oLed, светоизлучающие диоды с квантовыми точками (quantum dot light emitting diodes, QLED) и т.п.
[0060] Источник 140 питания выполнен с возможностью подачи питания на процессор, экран дисплея, модуль связи и т.п.
[0061] Интеллектуальное кольцо 100 для ног может дополнительно включать в себя внешнюю память, аудиомодуль, камеру, индикатор (например, световой индикатор) и т.п. В данной заявке это однозначно не ограничено.
[0062] Фиг. 4 представляет собой схематическое представление формы продукта электронного устройства 100 в соответствии с вариантом осуществления этой заявки. Электронное устройство может быть, в частности, интеллектуальным кольцом 100 для ног. Интеллектуальное кольцо 100 для ног может включать в себя браслет и циферблат. Интеллектуальное кольцо 100 для ног можно надевать на лодыжку пользователя с помощью браслета и отображать данные движения, результат классификации действий, классификацию персонажа и/или персональный тег и т.п. с помощью экрана дисплея циферблата.
[0063] В настоящее время относительно общий способ мониторинга движения для мониторинга данных движения спортивных занятий заключается в мониторинге пространственных трехмерных координат целевых точек, распределенных на поверхности цели, на основе оптической системы захвата движения, чтобы мониторить характеристику действия цели. Это решение требует вставки большого количества целевых точек на поверхность цели перед развертыванием для использования и требует корректировки модели перед использованием. Базовым принципом этого решения является принцип компьютерного зрения. Это решение достигается за счет использования набора точных и сложных оптических камер. Множество высокоскоростных камер отслеживают целевые точки, распределенные по поверхности цели под разными углами, для полного мониторинга характеристик действия всего тела. Оптическая система захвата движения довольно громоздка в установке и эксплуатации и стоит относительно дорого. В результате оптическую систему захвата движения трудно продвигать, и она не универсальна.
[0064] Другой часто используемый способ мониторинга движения основан на распределенных датчиках. Этот способ заключается в сборе параметров всех узловых частей цели на основе распределенных датчиков на поверхности цели, выполнении выравнивания по времени данных датчиков всех узловых частей с использованием аппаратуры синхронизации времени, передаче параметров, собранных датчиками на всех из узлов, блоку обработки данных с использованием беспроводного протокола в режиме реального времени для объединения данных и выполнения распознавания и классификации действий в соответствии с результатом, выведенным после объединения. Перед использованием этого способа мониторинга требуется предустановка и синхронная во времени калибровка датчика в каждом узле на поверхности цели. Основным недостатком этого решения является то, что множество датчиков смещения наклеено на различные части тела спортсмена. Следовательно, затраты высоки, требуется большой объем подготовительной работы, требуется синхронная по времени передача для каждого блока датчиков, слияние данных сложно, а объем данных велик.
[0065] Для решения упомянутых проблем эта заявка предоставляет способ мониторинга данных движения. В соответствии с упомянутым способом электронное устройство собирает сигнал угловой скорости и сигнал ускорения пользователя и обрабатывает сигнал угловой скорости и сигнал ускорения для получения данных движения пользователя. Сигнал угловой скорости и сигнал ускорения пользователя могут быть получены с помощью шестиосевого датчика. Затраты низкие, а синхронная по времени передача и объединение данных для множества блоков датчиков не требуются. Данные движения (например, высота прыжка) пользователя в различных видах спорта (например, в баскетболе) можно мониторить в режиме реального времени, а пользовательский опыт в спорте можно улучшить.
[0066] Для простоты понимания нижеследующее конкретно описывает способ мониторинга данных движения, предоставленный в варианте осуществления этой заявки, со ссылкой на прилагаемые чертежи.
[0067] Как показано на фиг. 5, вариант осуществления этой заявки обеспечивает способ мониторинга данных движения. Способ включает в себя следующие этапы.
[0068] Этап 501: Электронное устройство собирает сигнал угловой скорости и сигнал ускорения пользователя.
[0069] Электронное устройство может получать сигнал ускорения пользователя с помощью датчика ускорения. Сигнал ускорения пользователя включает в себя значения ускорений по трем осям координат локальной горизонтальной системы координат, дискретизированные электронным устройством. Электронное устройство может получать сигнал угловой скорости пользователя с помощью гироскопа. Сигнал угловой скорости пользователя включает в себя значения угловых скоростей по трем осям координат локальной горизонтальной системы координат, дискретизированные электронным устройством.
[0070] Электронное устройство может собирать сигнал угловой скорости и сигнал ускорения ступни или ноги пользователя. Ступня пользователя включает в себя такие части, как подъем ступни и подошва ступни пользователя. Нога пользователя включает в себя такие части, как лодыжка, икра, колено и бедро пользователя. Например, электронное устройство может быть встроено в подошву обуви, верх обуви или стельку обуви пользователя для сбора сигнала угловой скорости и сигнала ускорения ступни пользователя. Альтернативно, электронное устройство может представлять собой интеллектуальное кольцо для ног и надевается на лодыжку или икру пользователя для сбора сигнала угловой скорости и сигнала ускорения лодыжки или голени пользователя. В качестве альтернативы электронное устройство может быть помещено в спортивный наколенник или спортивную повязку для сбора сигнала угловой скорости и сигнала ускорения колена или бедра пользователя. То, что электронное устройство собирает сигнал угловой скорости и сигнал ускорения ступни пользователя, используется в качестве примера ниже для описания.
[0071] Этап 502: Электронное устройство получает характеристику формы сигнала для сигнала угловой скорости на основании сигнала угловой скорости и получает характеристику формы сигнала для сигнала ускорения на основе сигнала ускорения.
[0072] Электронное устройство может извлекать соответствующие характеристики формы сигнала для сигнала угловой скорости и сигнала ускорения на основе сигнала угловой скорости, собранного датчиком гироскопа, и сигнала ускорения, собранного датчиком ускорения. Каждая характеристика формы сигнала включает в себя количество пиков, количество провалов, значение пика, асимметрию, эксцесс и т.п.
[0073] Этап 503: Электронное устройство определяет характеристику походки пользователя в соответствии с характеристикой формы сигнала для сигнала угловой скорости и характеристикой формы сигнала для сигнала ускорения, где характеристика походки пользователя включает в себя продолжительность полета ступни от отрыва от земли до касания земли.
[0074] Понятно, что процесс занятий спортом, осуществляемый человеческим телом, может включать в себя множество циклов действий. Один цикл действия означает время, необходимое для полного действия (например, ходьбы или прыжка). Один цикл действия может включать в себя серию типичных изменений походки. Это типичное изменение походки можно разделить на различные фазы/периоды походки. Например, один цикл действия может также включать фазу отрыва от земли (также называемую периодом отрыва от земли), фазу полета (также называемую периодом полета) и фазу касания земли (также называемую периодом касания земли). Фаза отрыва от земли может представлять собой процесс от подъема пятки до отрыва ступни от земли. Фаза полета может быть процессом передвижения ноги в воздухе. Фаза касания земли может представлять собой процесс, при котором центр тяжести смещается с пятки на всю ступню после того, как пятка коснется земли, до тех пор, пока вся ступня не коснется земли. Ускорение ступни пользователя постепенно увеличивается от ранней стадии к концу периода отрыва от земли. Ускорение ступни пользователя постепенно уменьшается от ранней стадии к концу периода касания земли.
[0075] В качестве примера используется процесс движения одной ступни. Можно считать, что ступня находится в стационарном состоянии в течение периода отрыва от земли и периода касания земли. В этом случае значение в гироскопе близко к нулю, а значение в датчике ускорения примерно равно ускорению свободного падения.
[0076] Например, можно определить, находится ли пользователь в стационарном состоянии, на основе определяющего критерия в соответствии с  , где
, где
 ,
,  , gyrothr = 0.2 рад/с,
, gyrothr = 0.2 рад/с,
g - единица ускорения свободного падения, а 1 g приблизительно равен 9,8 м/с^2.
[0077] Если определено, что пользователь находится в стационарном состоянии, вектор оси свободного падения  =
=  (
( ) электронного устройства (например, интеллектуального кольца ступни) можно получить в соответствии с трехосным данным датчика ускорения в стационарном состоянии. Если пользователь находится в состоянии движения (нестационарное состояние), может быть повторно использована ось свободного падения предыдущего этапа (то есть последняя ось свободного падения, вычисленная в стационарном состоянии).
) электронного устройства (например, интеллектуального кольца ступни) можно получить в соответствии с трехосным данным датчика ускорения в стационарном состоянии. Если пользователь находится в состоянии движения (нестационарное состояние), может быть повторно использована ось свободного падения предыдущего этапа (то есть последняя ось свободного падения, вычисленная в стационарном состоянии).
[0078] Затем характеристика походки пользователя определяется на основе характеристики формы сигнала для сигнала угловой скорости и характеристики формы сигнала для сигнала ускорения, чтобы добиться разделения на один шаг и получить продолжительность полета каждого шага. Пошаговое разделение означает разделение каждого цикла действия процесса движения на некоторый период времени. Например, два соседних пика на диаграмме сигнала датчика ускорения могут представлять один цикл действия. Действием, соответствующим циклу действия, может быть шаг ходьбы, шаг бега или вертикальный прыжок. Характеристика походки пользователя может дополнительно включать в себя скорость в момент времени отрыва от земли, скорость в момент времени касания земли, и т.п. Момент времени отрыва от земли расположен в конце периода отрыва от земли, а момент времени касания земли расположен на ранней стадии периода касания земли.
[0079] Фиг. 6 представляет собой схематическую диаграмму формы сигнала (часть пунктирной линии) в датчике гироскопа и диаграмму формы сигнала (часть сплошной линии) в датчике ускорения во время ходьбы с постоянной скоростью и вертикального прыжка (например, перпендикулярного вертикального прыжка). Ходьбу с постоянной скоростью и вертикальный прыжок можно отличить друг от друга по характеристикам формы сигнала в датчике гироскопа. При ходьбе с постоянной скоростью пространственное положение ступни изменяется в состоянии полета (т. е. в состоянии после отрыва от земли и перед касанием земли) и следовательно форма сигнала в гироскопе изменяется относительно сильно (имея относительно большое количество пиков). При вертикальном прыжке пространственное положение ступни меняется мало в состоянии полета, и поэтому форма сигнала в гироскопе меняется мало (имея относительно небольшое количество пиков). Момент времени отрыва от земли (имеющий относительно небольшое пиковое значение) и момент времени касания земли (имеющий относительно большое пиковое значение) могут различаться друг от друга в соответствии с характеристиками формы сигнала в датчике ускорения. Альтернативно, момент времени отрыва от земли и момент времени касания земли могут различаться друг от друга в соответствии с формами волн в датчике ускорения и датчике гироскопа. Из диаграммы формы сигнала в датчике ускорения можно узнать, что ускорение при отрыве от земли (ускорение, соответствующее моменту времени отрыва от земли) во время ходьбы с постоянной скоростью составляет около 4 g, где g=9,8 м/с², a ускорение при касании земли (ускорение, соответствующее моменту времени касания земли) составляет около 6 g, а продолжительность полета составляет около 1420-1330=90 миллисекунд. Каждая миллисекунда может составлять 5 мс, то есть продолжительность полета 450 мс. Ускорение при отрыве от земли при вертикальном прыжке составляет около 7 g, ускорение при касании земли - около 14 g, продолжительность полета - около 1940-1840=100 миллисекунд. То есть продолжительность полета составляет 500 мс.
[0080] Этап 504: Электронное устройство определяет данные движения в соответствии с характеристикой походки.
[0081] Данные движения могут включать в себя по меньшей мере одно из высоты прыжка (например, высоту вертикального прыжка или высоту прыжка с разбега), дистанции передвижения, количества шагов и скорости передвижения пользователя в спорте. Данные движения могут дополнительно включать в себя сердцебиение, температуру тела, потребление калорий и т.п. пользователя. В данной заявке это однозначно не ограничено.
[0082] Например, данные движения - это высота прыжка. Электронное устройство может определять первую составляющую высоты прыжка в соответствии с продолжительностью полета, определять вторую составляющую высоты прыжка в соответствии с интегрированием сигнала ускорения по продолжительности полета и определять высоту прыжка в соответствии с первой составляющей и второй оставляющей. В этом варианте осуществления этой заявки высота прыжка определяется с использованием продолжительности полета и интегрирования сигнала ускорения по продолжительности полета, что позволяет повысить точность высоты прыжка.
[0083] Например, определение электронным устройством первой составляющей высоты прыжка в зависимости от продолжительности полета включает в себя:
= , где представляет собой первую составляющую, представляет собой продолжительность полета, а g представляет собой ускорение свободного падения.
[0084] Определение электронным устройством второй составляющей высоты прыжка в соответствии с интегрированием ускорения включает в себя:
= , где представляет собой вторую составляющую, представляет продолжительность полета, представляет собой начальный момент продолжительности полета, k - параметр корректировки, а представляет собой составляющую сигнала ускорения пользователя в направлении оси Z локальной горизонтальной системы координат.
[0085] Определение электронным устройством высоты прыжка в соответствии с первой составляющей и второй составляющей включает в себя:
когда |-|< , H = *(), где порог это предустановленный порог, а H - высота прыжка.
[0086] В некоторых вариантах осуществления электронное устройство может определять данные движения в соответствии с характеристикой походки и матрицей углов пространственного положения, а матрица углов пространственного положения определяется в соответствии с сигналом угловой скорости и сигналом ускорения. Матрица углов пространственного положения включает в себя угол несущей системы координат электронного устройства относительно локальной горизонтальной системы координат за период времени и может использоваться для представления характеристики пространственного положения пользователя. Следовательно, когда действие пользователя изменяется относительно сложно или быстро, действие пользователя может быть дополнительно распознано в соответствии с матрицей углов пространственного положения. Таким образом, данные движения могут быть определены более точно.
[0087] При необходимости электронное устройство корректирует матрицу углов пространственного положения в соответствии с матрицей корректировки углов пространственного положения. Электронное устройство может построить матрицу корректировки углов пространственного положения в соответствии с предустановленным условием. Предустановленное условие включает в себя предустановку скорости ступни пользователя перед отрывом от земли на 0 и смещения в вертикальном направлении на 0, а также предустановку скорости ступни пользователя после касания земли на 0 и смещения в вертикальном направлении на 0. Ранний момент времени отрыва от земли может быть ранним периодом периода отрыва от земли (фаза отрыва от земли), а период после касания земли может быть более поздним периодом периода касания земли (фаза касания земли). Основываясь на принципе линейной компенсации, электронное устройство может корректировать все матрицы углов пространственного положения за период от отрыва ступни от земли до касания земли. Таким образом, температурный дрейф и временной дрейф из-за датчика гироскопа и датчика ускорения могут быть эффективно устранены.
[0088] Например, где
C =  ;
;
 , , ;
, , ;
; и
, где
C представляет матрицу корректировки углов пространственного положения, представляет матрицу углов пространственного положения, представляет скорректированную матрицу углов пространственного положения, α, β и γ представляют собой соответственно углы поворота в направлении оси X, направлении оси Y и направлении оси z в локальной горизонтальной системе координат, vx, vy и vz - соответственно составляющие скорости в направлении оси x, направлении оси y и направлении оси z, Hz - смещение в направлении оси z, S - перемещение пользователя после отрыва от земли и до касания земли, ∆t - интервал времени отрыва от земли пользователя до касания земли, то есть продолжительность полета.
[0089] В этом варианте осуществления этой заявки матрица корректировки углов пространственного положения представлена с использованием направляющего косинуса. Матрица корректировки углов пространственного положения также может быть представлена на основе углов Эйлера или значения кватерниона. В данной заявке это однозначно не ограничено.
[0090] В некоторых вариантах осуществления корректировка нулевой скорости может выполняться для скорости передвижения ступни в интервале времени от касания земли до отрыва от земли и смещения в вертикальном направлении (то есть по оси Z) во время движения. Интервал времени от касания земли до отрыва от земли может включать в себя фазу касания земли и фазу отрыва от земли. Как показано на (а) на фиг. 7, момент времени локального минимального значения скорости/смещения по оси Z может быть найден в интервале времени от касания земли до отрыва от земли. Момент, соответствующий моменту времени локального минимального значения, является моментом нулевой скорости/нулевого смещения. Как показано на (b) на фиг. 7, скорость передвижения и смещение в момент, соответствующий моменту времени локального минимального значения, могут быть отрегулированы до нуля, чтобы уменьшить ошибку позиционирования. Таким образом, температурный дрейф и временной дрейф из-за датчика гироскопа и датчика ускорения могут быть эффективно устранены.
[0091] В качестве примера используется то, что электронное устройство представляет собой интеллектуальное кольцо для ног. Понятно, что, если интеллектуальное кольцо для ног надето на одну ногу пользователя, интеллектуальное кольцо для ног может определять данные движения пользователя на основе сигнала угловой скорости и сигнала ускорения ступни. Если интеллектуальные кольца для ног надеты на обе ноги пользователя, данные движения пользователя могут сравниваться и корректироваться в соответствии с отметками времени данных движения в двух кольцах для ног, чтобы получить более точные данные движения.
[0092] Этап 505: Электронное устройство выполняет классификацию действия в соответствии с характеристикой формы сигнала для сигнала угловой скорости, характеристикой формы сигнала для сигнала ускорения и данными движения, где результат классификации действия включает в себя по меньшей мере одно из вертикального прыжка, прыжка с разбега и бокового передвижения.
[0093] Как показано на фиг. 8, типы действий могут быть классифицированы и распознаны с использованием классификатора на основе соответствующих характеристик форм сигнала и данных движения датчика гироскопа и датчика ускорения. По сравнению с классификацией действий, основанной только на характеристиках формы сигнала или данных движения, классификация действий, основанная на сочетании характеристик, таких как характеристики формы сигнала и данные движения, может повысить точность классификации.
[0094] Каждая характеристика формы сигнала включает в себя количество пиков, количество провалов, значение пика, асимметрию, эксцесс и т.п. Данные движения включают в себя высоту прыжка, расстояние передвижения, продолжительность полета и т.п. Классификатор может быть классификатором логистической регрессии (LR), классификатором дерева решений (DT), классификатором случайного леса (RF), классификатором дерева решений с повышением градиента (GBDT) и т.п. В данной заявке это однозначно не ограничено.
[0095] Как показано на фиг. 9, баскетбол используется в качестве примера. Результат классификации действия может включать в себя перпендикулярный вертикальный прыжок, прыжок с разбега, ходьбу, бег, боковое передвижение и т.п., а также может включать в себя другие действия. В данной заявке это однозначно не ограничено. Таким образом, пользователь может узнать более четкое состояние движения пользователя на основе результата классификации действий, чтобы можно было улучшить взаимодействие с пользователем.
[0096] Этап 506: Электронное устройство выполняет сопоставление шаблонов данных движения и данных базы данных и выводит классификацию персонажа и/или персональный тег пользователя.
[0097] Баскетбол используется в качестве примера. Данные базы данных могут включать в себя данные множества пользователей. Данные пользователей могут включать в себя данные движения (высота прыжка, продолжительность полета, скорость передвижения и т.п.) пользователей, пользовательские параметры (такие как рост, вес, размах рук, процент броска, живость), результат классификации действия (вертикальный прыжок, прыжок с разбега и боковое передвижение) и т.п. Данные в базе данных могут быть выражены как  , где i представляет данные i-го пользователя в базе данных, n=1, 2, ... и N, а N представляет размерность характеристики данных пользователей (в том числе высоту прыжка, продолжительность полета, скорость движения, рост, вес, размах рук, вертикальный прыжок, прыжок с разбега и т.п.). База данных может быть нормализована для получения
, где i представляет данные i-го пользователя в базе данных, n=1, 2, ... и N, а N представляет размерность характеристики данных пользователей (в том числе высоту прыжка, продолжительность полета, скорость движения, рост, вес, размах рук, вертикальный прыжок, прыжок с разбега и т.п.). База данных может быть нормализована для получения  : =
: =  - (0, 1). Нормализация предназначена для устранения размерного влияния между различными индикаторами данных, чтобы индикаторы данных были одного порядка. Данные движения текущего пользователя могут быть выражены как
- (0, 1). Нормализация предназначена для устранения размерного влияния между различными индикаторами данных, чтобы индикаторы данных были одного порядка. Данные движения текущего пользователя могут быть выражены как  , где j представляет данные j-го раунда/времени, введенные текущим пользователем. Необязательно, может дополнительно включать в себя результат классификации действий и пользовательский параметр текущего пользователя. Результат классификации действия может включать в себя вертикальный прыжок, прыжок с разбега, боковое передвижение и т.п. Внешний входной параметр может включать в себя такие параметры, как рост, вес, размах рук и процент стрельбы пользователя.
, где j представляет данные j-го раунда/времени, введенные текущим пользователем. Необязательно, может дополнительно включать в себя результат классификации действий и пользовательский параметр текущего пользователя. Результат классификации действия может включать в себя вертикальный прыжок, прыжок с разбега, боковое передвижение и т.п. Внешний входной параметр может включать в себя такие параметры, как рост, вес, размах рук и процент стрельбы пользователя.
[0098] Как показано на фиг. 10, электронное устройство может выполнять сопоставление шаблонов для и и выводить классификацию персонажа и/или персональный тег пользователя. Например, правилом соответствия может быть принцип максимального коэффициента корреляции R(i, j):
max{R(i, j)} = max{ }.
}.
[0099] После сопоставления шаблонов электронное устройство может вывести классификацию персонажей и/или персональный тег пользователя. Например, если скорость движения и значение высоты вертикального прыжка пользователя относительно низкие, но рост пользователя относительно высокий, классификация персонажа может быть введена как центральный нападающий. Если скорость движения и значение живости пользователя относительно велики, классификация персонажа может быть введена как защитник. В другом примере, если вес пользователя превышает 80 кг, а высота вертикального прыжка превышает 70 см, персональный тег может быть введен как Omega Supreme. Если высота вертикального прыжка превышает 90 см, персональный тег может быть введен как пружинная нога. Таким образом, удовольствие от спорта увеличивается для пользователя, и пользовательский опыт может быть улучшен.
[00100] На основе способа мониторинга данных движения, представленного в этой заявке, электронное устройство может собирать сигнал угловой скорости и сигнал ускорения пользователя и обрабатывать сигнал угловой скорости и сигнал ускорения для получения данных движения пользователя. Сигнал угловой скорости и сигнал ускорения пользователя могут быть получены с помощью шестиосного датчика. Затраты низкие, а синхронная во времени передача и объединение данных для множества блоков датчиков не требуются. Данные движения (например, высоте прыжка) пользователя в различных видах спорта (например, в баскетболе) можно мониторить в режиме реального времени, а пользовательский опыт в спорте можно улучшить.
[00101] Некоторые другие варианты осуществления этой заявки дополнительно предоставляют устройство мониторинга данных движения. Устройство может быть применено к вышеупомянутому электронному устройству. Устройство сконфигурировано для выполнения различных функций или этапов, выполняемых мобильным телефоном в вышеупомянутых вариантах осуществления способа.
[00102] В случае использования функциональных модулей, соответствующих подразделениям функций, на фиг. 11 показана возможная схематическая структурная схема электронного устройства в предыдущем варианте осуществления. Электронное устройство сконфигурировано для реализации способов, записанных в предыдущих вариантах осуществления способа. Электронное устройство, в частности, включает в себя блок 1101 сбора, блок 1102 получения и блок 1103 определения.
[00103] Блок 1101 сбора выполнен с возможностью поддержки электронного устройства для выполнения процесса 501, показанного на фиг. 5. Блок 1102 получения выполнен с возможностью поддержки электронного устройства для выполнения процесса 502, показанного на фиг. 5. Блок 1103 определения выполнен с возможностью поддержки электронного устройства для выполнения процессов 503-506, показанных на фиг. 5. Все связанное содержание этапов в вышеприведенных вариантах осуществления способа может быть приведено в качестве функционального описания соответствующих функциональных модулей. Подробности не описаны здесь снова.
[00104] Вариант осуществления этой заявки дополнительно предоставляет компьютерный носитель данных. Компьютерный носитель данных хранит компьютерные инструкции, и компьютерные инструкции при выполнении на вышеупомянутом электронном устройстве заставляют электронное устройство выполнять функции или этапы, выполняемые мобильным телефоном в вышеупомянутых вариантах осуществления способа.
[00105] Вариант осуществления данной заявки дополнительно обеспечивает компьютерный программный продукт. Компьютерный программный продукт при запуске на компьютере заставляет компьютер выполнять функции или этапы, выполняемые мобильным телефоном в вышеприведенных вариантах осуществления способа.
[00106] Приведенные выше описания вариантов осуществления позволяют специалисту в данной области техники понять, что в целях удобного и краткого описания в качестве примера для иллюстрации используется разделение вышеупомянутых функциональных модулей. В реальном применении вышеупомянутые функции могут быть назначены различным модулям и реализованы в соответствии с требованием, то есть внутренняя структура аппаратуры разделена на различные функциональные модули для реализации всех или части функций, описанных выше.
[00107] Следует понимать, что в нескольких вариантах осуществления, представленных в этой заявке, раскрытые аппаратура и способ могут быть реализованы другими способами. Например, описанный вариант осуществления аппаратуры является лишь примерным. Например, модульное или модульное разделение представляет собой просто логическое функциональное разделение и может быть другим разделением в фактической реализации. Например, несколько блоков или компонентов могут быть объединены или интегрированы в другую систему, или некоторые функции могут быть проигнорированы или не реализованы. Кроме того, показанные или описанные взаимные связи или прямые связи или коммуникационные соединения могут быть реализованы с использованием некоторых интерфейсов. Косвенные соединения или коммуникационные соединения между устройствами или блоками могут быть реализованы в электрических, механических или других формах.
[00108] Блоки, описанные как отдельные части, могут быть физически отдельными, а части, отображаемые как блоки, могут быть одним или несколькими физическими блоками, могут быть расположены в одном месте или могут быть распределены в нескольких разных местах. Некоторые или все блоки могут быть выбраны в соответствии с фактическими требованиями для достижения целей решений вариантов осуществления.
[00109] Кроме того, функциональные блоки в вариантах осуществления настоящей заявки могут быть интегрированы в один блок обработки, или каждый из блоков может существовать отдельно физически, или два или более блоков интегрируются в один блок. Интегрированный блок может быть реализован в виде аппаратного обеспечения или может быть реализован в виде функционального блока программного обеспечения.
[00110] Если интегрированный модуль реализован в виде функционального модуля программного обеспечения и продается или используется как самостоятельный продукт, интегрированный модуль может храниться на считываемом носителе данных. Исходя из такого понимания, технические решения в этом варианте осуществления данной заявки по существу, или часть, дополняющая предшествующий уровень техники, или все или некоторые из технических решений могут быть реализованы в виде программного продукта. Программный продукт хранится на носителе данных и включает в себя несколько инструкций для указания устройству (которым может быть однокристальный микрокомпьютер, микросхема и т.п.) или процессору (processor) выполнять все или некоторые этапы способов, описаных в вариантах осуществления этой заявки. Вышеупомянутый носитель информации включает в себя: любой носитель, который может хранить программный код, такой как флэш-накопитель USB, съемный жесткий диск, постоянное запоминающее устройство (read-only memory ROM), оперативное запоминающее устройство (random access memory, RAM), магнитный диск или компакт-диск.
[00111] Вышеупомянутое содержимое является просто конкретными реализациями этой заявки, но не предназначено для ограничения области защиты этой заявки. Любые вариации или замены в техническом объеме, раскрытом в этой заявке должны подпадать в объем охраны этой заявки. Следовательно, объем охраны настоящей заявки должен соответствовать объему охраны формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕДОТВРАЩЕНИЕ ПАДЕНИЯ | 2010 |
|
RU2550934C2 |
| СПОСОБ ФОРМИРОВАНИЯ ВХОДНОГО СИГНАЛА ВО ВСЕНАПРАВЛЕННОЙ СИСТЕМЕ ДВИЖЕНИЯ | 2015 |
|
RU2687714C2 |
| СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ФИГУРИСТА | 2008 |
|
RU2399402C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДЛИТЕЛЬНОСТИ МНОГООБОРОТНОГО ПРЫЖКА | 2008 |
|
RU2399403C2 |
| Способ подготовки парашютистов и устройство его реализующее | 2019 |
|
RU2730759C1 |
| УСТРОЙСТВО И СПОСОБ ЛЕЧЕНИЯ НАРУШЕНИЯ ПОХОДКИ У СУБЪЕКТА | 2016 |
|
RU2732433C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВРАЩАТЕЛЬНОГО И ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ФИГУРИСТОВ В ПАРНОМ КАТАНИИ | 2011 |
|
RU2492898C2 |
| СИСТЕМА И СПОСОБЫ УПРАВЛЕНИЯ С ПОМОЩЬЮ АВТОПИЛОТА | 2013 |
|
RU2623792C2 |
| РЕЗЕРВНАЯ СИСТЕМА ДЛЯ ИНДИКАЦИИ КУРСА И ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ НА САМОЛЕТЕ | 2000 |
|
RU2236697C2 |
Изобретение относится к области терминалов и предоставляет способ и аппаратуру мониторинга данных движения для использования при мониторинге данных движения пользователя в спорте, требующем разнообразных действий в реальном времени, и улучшающие взаимодействие с пользователем в спорте. Способ мониторинга данных движения включает в себя: сбор электронным устройством сигнала угловой скорости и сигнала ускорения пользователя; получение электронным устройством характеристики формы сигнала угловой скорости на основе сигнала угловой скорости и получение характеристики формы сигнала для сигнала ускорения на основе сигнала ускорения; определение электронным устройством характеристики походки пользователя в соответствии с характеристикой формы сигнала для сигнала угловой скорости и характеристикой формы сигнала для сигнала ускорения, где характеристика походки включает в себя продолжительность полета ступни пользователя от отрыва от земли до касания земли; и определение электронным устройством данных движения в соответствии с характеристикой походки, где данные движения включают в себя высоту прыжка. Технический результат – обеспечение мониторинга особенности действий, обусловленных специализированным видом спорта, с обеспечением более желаемого спортивного опыта и более точного съема данных. 4 н. и 18 з.п. ф-лы, 11 ил. 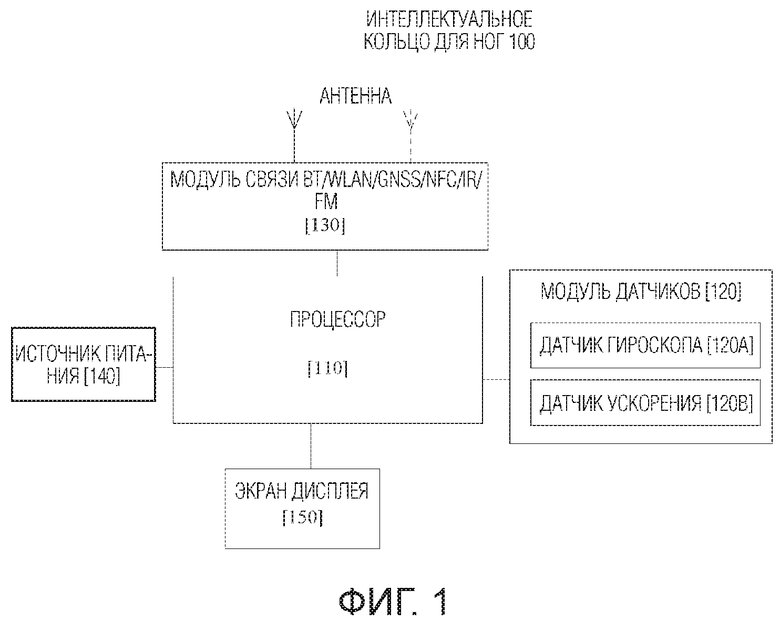
1. Способ мониторинга данных движения, содержащий:
сбор электронным устройством сигнала угловой скорости и сигнала ускорения пользователя;
получение электронным устройством характеристики формы сигнала для сигнала угловой скорости на основе упомянутого сигнала угловой скорости и получение характеристики формы сигнала для сигнала ускорения на основе упомянутого сигнала ускорения;
определение электронным устройством характеристики походки пользователя в соответствии с характеристикой формы сигнала для сигнала угловой скорости, характеристикой формы сигнала для сигнала ускорения и матрицей углов пространственного положения, при этом матрица углов пространственного положения определяется в соответствии с сигналом угловой скорости и сигналом ускорения и при этом характеристика походки содержит продолжительность полета ступни пользователя от отрыва от земли до касания земли; и
определение электронным устройством данных движения в соответствии с характеристикой походки, при этом данные движения содержат высоту прыжка.
2. Способ мониторинга данных движения по п. 1, отличающийся тем, что сбор электронным устройством сигнала угловой скорости и сигнала ускорения пользователя содержит:
сбор электронным устройством сигнала угловой скорости и сигнала ускорения ступни или ноги пользователя.
3. Способ мониторинга данных движения по п. 1 или 2, отличающийся тем, что определение электронным устройством данных движения в соответствии с характеристикой походки содержит:
определение электронным устройством первой составляющей высоты прыжка в соответствии с продолжительностью полета;
определение электронным устройством второй составляющей высоты прыжка в соответствии с интегрированием сигнала ускорения по продолжительности полета; и
определение электронным устройством высоты прыжка в соответствии с первой составляющей и второй составляющей.
4. Способ мониторинга данных движения по п. 3, отличающийся тем, что
определение электронным устройством первой составляющей высоты прыжка в соответствии с продолжительностью полета содержит:
 =
=  ,
,
где  представляет собой первую составляющую,
представляет собой первую составляющую,  представляет собой продолжительность полета, а g представляет собой ускорение свободного падения;
представляет собой продолжительность полета, а g представляет собой ускорение свободного падения;
определение электронным устройством второй составляющей высоты прыжка в соответствии с интегрированием ускорения по продолжительности полета содержит:
 =
=  ,
,
где представляет собой вторую составляющую, представляет собой продолжительность полета,  - начальный момент продолжительности полета, k - параметр корректировки,
- начальный момент продолжительности полета, k - параметр корректировки,  - составляющая сигнала ускорения пользователя в направлении оси Z локальной горизонтальной системы координат; и
- составляющая сигнала ускорения пользователя в направлении оси Z локальной горизонтальной системы координат; и
определение электронным устройством высоты прыжка в соответствии с первой составляющей и второй составляющей содержит:
когда |-|<  , H =
, H =  *(
*( ),
),
где порог - предустановленный порог, а H - высота прыжка.
5. Способ мониторинга данных движения по п. 1, дополнительно содержащий:
построение электронным устройством матрицы корректировки углов пространственного положения в соответствии с предустановленным условием, при этом предустановленное условие содержит предустановку скорости ступни пользователя перед отрывом от земли на 0 и смещения в вертикальном направлении на 0 и предустановку скорости ступни пользователя после касания земли на 0 и смещения в вертикальном направлении на 0; и
корректировку электронным устройством матрицы углов пространственного положения в соответствии с матрицей корректировки углов пространственного положения.
6. Способ мониторинга данных движения по п. 5, отличающийся тем, что корректировка электронным устройством матрицы углов пространственного положения в соответствии с матрицей корректировки углов пространственного положения содержит:
 ,
,
где
C =  ;
;
 ,
,  ,
,  ;
;
 ; и
; и
 ,
,
где C представляет матрицу корректировки углов пространственного положения,  представляет матрицу углов пространственного положения,
представляет матрицу углов пространственного положения,  представляет скорректированную матрицу углов пространственного положения, α, β и γ представляют собой соответственно углы поворота в направлении оси X, направлении оси Y и направлении оси Z в локальной горизонтальной системе координат, vx, vy и vz - соответственно составляющие скорости в направлении оси x, направлении оси y и направлении оси z, Hz - смещение в направлении оси z, S - смещение ступни пользователя после отрыва от земли и до касания земли,
представляет скорректированную матрицу углов пространственного положения, α, β и γ представляют собой соответственно углы поворота в направлении оси X, направлении оси Y и направлении оси Z в локальной горизонтальной системе координат, vx, vy и vz - соответственно составляющие скорости в направлении оси x, направлении оси y и направлении оси z, Hz - смещение в направлении оси z, S - смещение ступни пользователя после отрыва от земли и до касания земли,  - временной интервал от отрыва от земли ступни пользователя до касания земли.
- временной интервал от отрыва от земли ступни пользователя до касания земли.
7. Способ мониторинга данных движения по любому из пп. 1-6, отличающийся тем, что
данные движения дополнительно содержат по меньшей мере одно из расстояния передвижения, количества шагов и скорости передвижения пользователя.
8. Способ мониторинга данных движения по любому из пп. 1-7, дополнительно содержащий:
выполнение электронным устройством корректировки нулевой скорости по моменту времени локального минимального значения скорости движения в интервале времени от касания земли до отрыва от земли; и/или
выполнение электронным устройством корректировки расстояния по локальному минимальному значению момента времени смещения в вертикальном направлении в интервале времени от касания земли до отрыва от земли.
9. Способ мониторинга данных движения по любому из пп. 1-8, дополнительно включающий:
выполнение электронным устройством классификации действия в соответствии с характеристикой формы сигнала для сигнала угловой скорости, характеристикой формы сигнала для сигнала ускорения и данными движения, при этом результат классификации действия содержит по меньшей мере одно из вертикального прыжка, прыжка с разбега и бокового передвижения.
10. Способ мониторинга данных движения по любому из пп. 1-9, дополнительно содержащий:
выполнение электронным устройством сопоставления шаблонов данных движения и данных базы данных и вывод классификации персонажа и/или персонального тега пользователя.
11. Электронное устройство для мониторинга данных движения, содержащее:
блок сбора, сконфигурированный для сбора сигнала угловой скорости и сигнала ускорения пользователя;
блок получения, сконфигурированный для получения характеристики формы сигнала угловой скорости на основе сигнала угловой скорости и получения характеристики формы сигнала для сигнала ускорения на основе сигнала ускорения; и
блок определения, сконфигурированный для определения характеристики походки пользователя в соответствии с характеристикой формы сигнала для сигнала угловой скорости, характеристикой формы сигнала для сигнала ускорения и матрицей углов пространственного положения, при этом матрица углов пространственного положения определяется в соответствии с сигналом угловой скорости и сигналом ускорения и при этом характеристика походки содержит продолжительность полета от отрыва от земли ступни пользователя до касания земли, при этом
блок определения дополнительно сконфигурирован для определения данных движения в соответствии с характеристикой походки и при этом данные движения содержат высоту прыжка.
12. Электронное устройство для мониторинга данных движения по п. 11, отличающееся тем, что блок сбора выполнен с возможностью:
собирать сигнал угловой скорости и сигнал ускорения ступни или ноги пользователя.
13. Электронное устройство для мониторинга данных движения по п. 11 или 12, в котором блок определения выполнен с возможностью:
определять первую составляющую высоты прыжка в соответствии с продолжительностью полета;
определять вторую составляющую высоты прыжка в соответствии с интегрированием сигнала ускорения по продолжительности полета; и
определить высоту прыжка в соответствии с первой составляющей и второй составляющей.
14. Электронное устройство для мониторинга данных движения по п. 13, отличающееся тем, что
= ,
где представляет собой первую составляющую, представляет собой продолжительность полета, а g представляет собой ускорение свободного падения;
= ,
где - вторая составляющая, - продолжительность полета, - начальный момент продолжительности полета, k – параметр корректировки, - составляющая сигнала ускорения пользователя в направлении оси Z локальной горизонтальной системы координат; и
когда |-|< , H = *(),
где порог - предустановленный порог, а H - высота прыжка.
15. Электронное устройство для мониторинга данных движения по п. 11, отличающееся тем, что блок определения дополнительно выполнен с возможностью:
построения матрицы корректировки углов пространственного положения в соответствии с предустановленным условием, при этом предустановленное условие содержит предустановку скорости ступни пользователя перед отрывом от земли на 0 и смещения в вертикальном направлении на 0, а также предустановку скорости ступни пользователя после касания земли на 0 и смещения в вертикальном направлении на 0; и
корректировки матрицы углов пространственного положения в соответствии с матрицей корректировки углов пространственного положения.
16. Электронное устройство для мониторинга данных движения по п. 15, отличающееся тем, что
,
где
C =  ;
;
 ,
,  , ;
, ;
 , и
, и
,
где C представляет матрицу корректировки углов пространственного положения, представляет матрицу углов пространственного положения, представляет скорректированную матрицу углов пространственного положения, α, β и γ представляют собой соответственно углы поворота в направлении оси X, направлении оси Y и направлении оси Z в локальной горизонтальной системе координат, vx, vy и vz - соответственно составляющие скорости в направлении оси x, направлении оси y и направлении оси z, Hz - смещение в направлении оси z, S - смещение ступни пользователя после отрыва от земли и до касания земли, - временной интервал от отрыва ступни пользователя от земли до касания земли.
17. Электронное устройство для мониторинга данных движения по любому из пп. 11-16, отличающееся тем, что
данные движения дополнительно содержат по меньшей мере одно из расстояния передвижения, количества шагов и скорости передвижения пользователя.
18. Электронное устройство для мониторинга данных движения по любому из пп. 11-17, отличающееся тем, что блок определения дополнительно выполнен с возможностью:
выполнять корректировку нулевой скорости в соответствии с моментом времени локального минимального значения скорости движения в интервале времени от касания земли до отрыва от земли; и/или
выполнять корректировку расстояния в соответствии с моментом времени локального минимального значения смещения в вертикальном направлении в интервале времени от касания земли до отрыва от земли.
19. Электронное устройство для мониторинга данных движения по любому из пп. 11-18, в котором блок определения дополнительно сконфигурирован, чтобы:
выполнять классификацию действия в соответствии с характеристикой формы сигнала для сигнала угловой скорости, характеристикой формы сигнала для сигнала ускорения и данными движения, при этом результат классификации действия содержит по меньшей мере одно из вертикального прыжка, прыжка с разбега и бокового движения.
20. Электронное устройство для мониторинга данных движения по любому из пп. 11-19, отличающееся тем, что блок определения дополнительно выполнен с возможностью:
выполнять сопоставление шаблонов данных движения и данных базы данных и выводить классификацию персонажей и/или персональный тег пользователя.
21. Аппаратура мониторинга данных движения, содержащая процессор, при этом процессор соединен с памятью, память хранит инструкции и процессор сконфигурирован для вызова и выполнения инструкций, чтобы вынуждать аппаратуру выполнять способ мониторинга данных движения в соответствии с любым из пп. 1-10.
22. Машиночитаемый носитель данных, содержащий инструкции, при этом инструкции при выполнении на компьютере вынуждают компьютер выполнять способ мониторинга данных движения по любому из пп. 1-10.
| CN 104729507 B, 26.01.2018 | |||
| CN 106778694 A, 31.05.2017 | |||
| CN 106127135 A, 16.11.2016 | |||
| US 2015057966 A1, 26.02.2015. |

