Уровень техники
Настоящая заявка в целом относится к системам управления полетом, а более конкретно, к автопилоту винтокрылого летательного аппарата (ЛА) и к соответствующим способам.
Вертолет по своей природе является неустойчивым ЛА, и, как правило, требует от пилота постоянного управления циклическим шагом лопастей несущего винта одной рукой. Даже кратковременное отпускание ручки управления (РУ) вертолета может привести к ее “болтанию” с последующей потерей управления вертолетом. Это особенно неудобно, когда пилоту требуется выполнить какие-то действия с помощью рук, например, поправить наушники или развернуть бумажную карту. Кроме того, необходимость непрерывного управления циклическим шагом несущего винта может приводить к усталости пилота.
Традиционные автопилотные системы управления могут обеспечивать преимущества, к которым относятся возможность для пилота отпускать ручку управления циклическим шагом лопастей винта, используя руки для выполнения других задач, а также уменьшение степени усталости пилота. Заявители, однако, признают, что стоимость традиционных вертолетных автопилотных систем может быть непомерно высокой. Например, стоимость традиционных или обычных вертолетных автопилотов может быть настолько высока по сравнению со стоимостью самого вертолета, что автопилоты редко применяются на легких вертолетах.
Вышеуказанные примеры аналогов, известных из уровня техники, и относящиеся к ним недостатки являются лишь иллюстративными и не носят ограничительный характер. Другие ограничения и недостатки аналогов станут очевидными специалистам в данной области после ознакомления с приведенным ниже описанием и приложенными чертежами.
Сущность изобретения
Описываемые здесь варианты осуществления и аспекты изобретения, а также относящиеся к ним системы, приборы и способы приводятся лишь в качестве примеров и носят иллюстративный характер, не ограничивая объем изобретения. В одних вариантах осуществления изобретения рассматриваются одна или несколько вышеуказанных проблем с целью их уменьшения или устранения, в то время как другие варианты направлены на достижение других усовершенствований.
В целом, рассматривается автопилотная система управления вертолетом, а также соответствующие компоненты и способы. Один из аспектов настоящего изобретения предлагает автопилотную систему для управления вертолетом с ручкой управления, приводимой в движение пилотом с целью управления вертолетом вручную рукой пилота, находящейся на ручке управления. Система автопилота содержит процессорное устройство для контроля полета вертолета и генерирования управляющих сигналов в соответствии с результатами контроля. Приводное устройство получает управляющие сигналы для управления полетом вертолета в соответствии с выбранным одним или несколькими различными режимами полета. Устройства ввода сигналов расположено на ручке управления, так что выбор и управление всеми режимами полета может осуществляться только одной рукой пилота, находящейся на ручке управления, без снятия руки с ручки управления, с одновременным управлением полетом вертолета.
Еще один из аспектов настоящего изобретения предлагает автопилотную систему и соответствующий способ для управления вертолетом с ручкой, приводимой в движение с целью управления вертолетом вручную рукой пилота, находящейся на ручке управления. Система автопилота содержит процессорное устройство для контроля полета вертолета и генерирования управляющих сигналов в соответствии с результатами контроля. Приводное устройство получает управляющие сигналы для управления полетом вертолета в соответствии с выбранным одним или несколькими различными режимами полета. Устройство ввода командных сигналов расположено на ручке управления, так что выбор всех режимов и управление ими осуществляется исключительно с помощью данного устройства ввода, расположенного на ручке управления.
Еще одним аспектом настоящего изобретения предлагается система автопилота и соответствующий способ для управления полетом вертолета. Система автопилота содержит сенсорное устройство, обеспечивающее набор выходных сигналов, которые характеризуют режим полета вертолета. Устройство обработки информации служит для генерирования управляющих сигналов для приводов в соответствии с набором выходных сигналов датчиков для управления полетом вертолета в выбираемом пилотом одном или нескольких режимах полета с последующим генерированием выходного сигнала корректируемого гироскопа на основании только данного набора выходных сигналов датчиков. Автопилотный дисплей может показывать пилоту информацию по автопилотному режиму полета, выдавая пилоту одновременно выходной сигнал корректируемого гироскопа на основании выходного сигнала корректируемого гиродатчика.
Еще одним аспектом настоящего изобретения предлагается система автопилота и соответствующий способ для управления полетом вертолета. Система автопилота содержит процессорное устройство, служащее для определения статуса полета вертолета на основании ряда входных сигналов датчиков для управления вертолетом в одном или нескольких режимов полета, а также для обеспечения возможности выбора пилотом одного или нескольких (но не всех) режимов из предусмотренного набора режимов полета, измененного для выбора пилотом на основании текущего полетного статуса вертолета.
В продолжающемся аспекте настоящего изобретения раскрывается система автопилота для вертолета, содержащего роторную систему управлением циклическим шагом несущего винта для управления полетом, причем указанный вертолет может генерировать, по меньшей мере, сигнал НИЗКИХ ОБОРОТОВ, указывающий на предельно низкую допустимую частоту вращения ротора. Система автопилота содержит сенсорное устройство, обеспечивающее ряд выходных сигналов, которые характеризуют режим полета вертолета. Приводное устройство служит для перемещения ручки продольно-поперечного управления в соответствии с сигналами продольно-поперечного управления. Управляющее устройство получает сигнал активации, по меньшей мере, частично основанный на сигнале НИЗКИХ ОБОРОТОВ и выходных сигналах датчиков, и по активационному сигналу автоматически включает режим аварийного снижения для генерирования сигналов циклического управления в соответствии с выходными сигналами датчиков для управления циклическим шагом несущего винта без входных управляющих сигналов от пилота, по меньшей мере, на начальном этапе снижения, по меньшей мере, для изменения угла тангажа вертолета таким образом, чтобы обеспечить начальную стабилизацию горизонтальной скорости вертолета, которая находится в определенном диапазоне независимо от заданной горизонтальной скорости полета в момент получения активационного сигнала.
Краткое описание чертежей
Варианты осуществления настоящего изобретения поясняются с помощью приложенных чертежей. Предполагается, что раскрываемые здесь варианты осуществления и чертежи носят не ограничительный, а лишь иллюстративный характер.
Фиг. 1 - схематичное, частичное, перспективное изображение вертолета, включая компоненты автопилота согласно настоящему изобретению.
Фиг. 2 - схематичное частичное изображение (вид сверху) вертолета, представленного на фиг. 1, приведенное для иллюстрации деталей различных компонентов автопилотной системы.
Фиг. 3 - блок-схема, иллюстрирующая вариант исполнения системы автопилота согласно настоящему изобретению.
Фиг. 4 - схематичное увеличенное перспективное изображение варианта исполнения ручки продольно-поперечного управления согласно настоящему изобретению, включая блок переключения, обеспечивающий возможность использования пилотом своих рук при ручном управлении.
Фиг. 5 - диаграмма, показывающая диапазоны скоростей автопилота для нескольких режимов управления с помощью автопилота.
Фиг. 6а и 6b - экранные снимки, показывающие варианты внешнего вида экрана индикатора в программном режиме GPS.
Фиг. 7а и 7b - экранные снимки, показывающие варианты внешнего вида экрана индикатора в режиме стабилизации высоты полета.
Фиг. 8а и 8b - экранные снимки, показывающие варианты внешнего вида экрана индикатора в режиме стабилизации скорости полета.
Фиг. 9 - экранный снимок, показывающий вариант внешнего вида экрана индикатора в режиме висения.
Фиг. 10а и 10b - экранные снимки, показывающие варианты внешнего вида экрана индикатора в режиме удержания позиции.
Фиг. 11a-11c - экранные снимки, показывающие варианты внешнего вида экрана индикатора в режиме выбора режима.
Фиг. 11d - экранный снимок, показывающий вариант внешнего вида экрана индикатора в режиме авторотации.
Фиг. 12 - блок-схема, иллюстрирующая вариант осуществления способа обеспечения индивидуализированного выбора пунктов меню автопилота на основании, например, статистических данных текущего полета.
Осуществление изобретения
Нижеследующее описание приводится с целью обеспечения возможности использования настоящего изобретения специалистом среднего уровня и приводится в контексте патентной заявки и предъявляемых к ней требований. Различные модификации описанных вариантов осуществления настоящего изобретения будут очевидны специалистам в данной области, а общие принципы настоящего изобретения являются применимыми и к другим вариантам исполнения. Таким образом, настоящее изобретение не ограничивается вариантами, представленными в данном описании, но включает в себя широкий круг различных вариантов, соответствующих описанным здесь основным принципам и отличительным признакам изобретения, включая их модификации и эквивалентные варианты. Следует отметить, что чертежи могут быть выполнены не в масштабе, а также могут быть схематичными, в той степени, в какой это считается оптимальным для наилучшей иллюстрации отличительных признаков изобретения. В целях улучшения понимания может использоваться описательная терминология для описания различных видов, представленных на чертежах, и данная терминология никоим образом не является ограничительной.
На фиг. 1 приведено схематичное частичное перспективное изображение различных компонентов вертолета 10, показанных здесь в целях иллюстрации различных компонентов варианта осуществления автопилотной системы 12 относительно вертолета. Следует отметить также, что многие физические элементы конструкции самого вертолета для обеспечения ясности на фиг. 1 не показаны, однако, следует иметь в виду, что они присутствуют. Автопилот настоящего изобретения является электромеханическим и может обеспечивать управление полетом вертолета без гидравлической системы управления. Вертолет может быть, например, вертолетом “Робинзон R22”, однако, не только им, но и вертолетами других типов. Раскрываемые здесь принципы могут быть применены и для любого другого подходящего вертолета, как уже существующего, так и тех, которые еще только будут разработаны в будущем. Например, автопилот согласно настоящему изобретению может применяться на вертолетах с гидравлическим приводом ручки управления циклическим шагом винта, как будет описано ниже.
Вертолет 10 содержит ручку 14 управления циклическим шагом несущего винта с рукояткой 18, форма которой соответствует форме руки пилота. Специалисту в данной области будет понятно, что ручку управления 14 можно соответствующим образом перемещать вперед-назад (относительно приборной панели 20) для управления вертолетом по тангажу, и влево-вправо для управления по крену для получения управляемого полета. Дополнительные управляющие сигналы обеспечиваются пилотом с помощью пары педалей для управления положением вертолетом по рысканию путем изменения угла установки лопастей рулевого винта. Следует отметить, что данные компоненты управления по рысканию не показаны в целях обеспечения иллюстративной ясности, но необходимо иметь в виду, что они присутствуют. Далее, пилот осуществляет управление как полетом вертолета, так и регулирование угла установки рычага управления двигателем (РУД). Однако автопилот согласно настоящему изобретению может полностью осуществлять управление вертолетом, перемещая ручку управления 14 в любом направлении в пределах диапазона ее перемещения при определенных обстоятельствах. Ручка управления 14 уходит вниз под пол 24 кабины вертолета, и там соединяется с тягами управления по тангажу и крену вертолета, так, как это делается обычно и известно специалистам, с целью осуществления управления циклической работой несущего винта вертолета. Термин “циклический” относится к изменению шага лопастей несущего винта за один оборот. В этом смысле, циклическое управление может относиться к производимым пилотом перемещениям ручки управления, или сама ручка управления может называться ручкой циклического управления. Автопилотный блок обработки и индикации данных (ADPU) 28, лучше видимый на увеличенном изображении, может быть установлен на приборной панели 20 для отображения данных для пилота, а также для обеспечения возможности их обработки и т.п., как будет показано ниже.
Далее, как показано на фиг. 1, мы видим, что автопилот 12 осуществляет циклическое управление с помощью ряда составляющих компонентов, соответствующим образом расположенных на вертолете. Основной блок АП 30 расположен под полом основной кабины вертолета. В данном варианте осуществления изобретения основной блок 30 содержит L-образный корпус 31, служащий опорой для электроники, а также тягу управления по тангажу 32а и тягу управления по крену 32b, которым в целом может быть присвоена ссылочная позиция 32. Каждая из этих тяг содержит привод, расположенный внутри корпуса основного блока, как будет показано ниже. Дальний конец каждой тяги соединен с нижним концом ручки управления 14, образуя систему, известную под названием параллельной системы управления. В связи с этим, следует отметить, что оригинальные тяги циклического управления вертолета 10 между ручкой управления 14 и несущим винтом остаются незатронутыми. Таким образом, входные сигналы от пилота вертолета, а также от автопилота, поступают непосредственно на ручку управления. Ниже будут описаны подробности в отношении тяг управления по тангажу и крену для схемы ввода данных при параллельном управлении. Автопилотная система управления серийного типа, наоборот, требует прерывания оригинальных тяг циклического управления вертолета между ручкой управления и несущим винтом, для того чтобы автопилотные приводы можно было поместить в данный разрыв. Следует также отметить, что идеи настоящего изобретения можно легко применить и к серийным системам управления. Помимо этого, автопилот 12 содержит переключающий блок 26, показанный в увеличенном виде на других чертежах и подробно описанный ниже.
На фиг. 2 представлено перспективное изображение компонентов вертолета и автопилотной системы управления (вид сверху). На данном чертеже можно увидеть привод управления по тангажу 60а и привод управления по крену 60b (которые можно обозначить одной ссылочной позицией 60), установленные в L-образном корпусе 31, крышка которого для ясности представлена прозрачной. Электронное оборудование 66 основного блока находится внутри корпуса и соответствующим образом электрически соединено (не показано) с ручкой управления 18, содержащей переключающий блок 26, и с приводами управления.
После описания механических компонентов автопилота следует перейти к его описанию в плане взаимодействия вышеуказанных компонентов с соответствующим управляющим электронным оборудованием. В частности, на фиг. 3 представлена блок-схема варианта исполнения автопилота 12. В этом смысле, основной блок 30, содержащий корпус 31, приводы 60 управления по тангажу и крену и электронное оборудование 66, можно здесь и далее обозначить как процессорный блок управления электродвигателями (MCPU) или основной блок АП 30. MCPU содержит три микропроцессора, каждый из которых можно назвать процессором управления электродвигателем (МСР) или процессором тройного действия. Имеется три процессора МСР, обозначаемые соответственно МСР А, МСР В и МСР С. Каждый их этих процессоров соединен с комплектом датчиков, состоящим из трехосевых МЭМС-датчиков (микроэлектромеханическая система) угловой скорости и трехосевых МЭМС-датчиков ускорения. В рассматриваемом варианте осуществления изобретения указанные комплекты датчиков одинаково сконфигурированы. Процессоры МСР используются для образования внутреннего контура общей системы управления, включающей в себя внутренний контур и внешний контур. Процессоры МСР обеспечивают подачу командных сигналов на бесщеточные электродвигатели постоянного тока, электродвигатель А и электродвигатель В привода 60а управления по тангажу и привода 60b управления по крену, приводящие в действие систему управления вертолета. Все межпроцессорные связи осуществляются с помощью последовательной шины, изначально установленной на каждом из процессоров. Целостность данных может обеспечиваться с помощью циклического контроля избыточности, внедренного в поток данных.
Федеральным управлением гражданской авиации выдан сертификат на версию DO-178 программного обеспечения бортовых систем. В момент оформления данной заявки выпущена версия DO-178C. Данным документом определяются уровни гарантии проектирования (DALs) на основании критичности отказа программного обеспечения в данной системе. Например, уровень DAL A обозначается как “катастрофический” и присваивается в том случае, когда отказ может привести к аварии. В качестве другого примера, уровень DAL C обозначается как “основной” и присваивается в случае, когда отказ является значительным и может приводить к дискомфорту пассажиров и повышению нагрузки на экипаж. В рассматриваемом варианте осуществления изобретения каждый из трех процессоров МСР может работать на одинаковом программном обеспечении уровня DAL A, образуя систему с тройным резервированием. Процессоры управления электродвигателями соединены друг с другом, так что они могут обмениваться данными. Каждый процессор считывает данные с комплекта датчиков и сравнивает их с данными, поступающими от двух остальных процессоров, с целью согласования этих данных, и каждый из процессоров управления электродвигателями вычисляет средние значения всех соответствующих датчиков для использования при дальнейшей обработке данных. В другом варианте осуществления вместо средних значений могут вычисляться медианные значения. Данные датчиков, признанные ошибочными на основании медианы, исключаются из данных, влияющих на среднее значение. Как правило, обнаружение отказа датчика (в отличие от наличия случайных помех) может осуществляться путем низкочастотной фильтрации данных каждого из трех комплектов датчиков с целью устранения случайных помех. Отфильтрованные сигналы сравниваются друг с другом на предмет согласованности, и если какой-либо один из отфильтрованных сигналов значительно отличается от остальных двух (например, выходит за пределы заданных граничных значений), датчик, с которого поступили эти данные, может считаться отказавшим. Обнаружение отказа гироскопического датчика угловой скорости может осуществляться аналогичным образом, с той лишь разницей, что данные гироскопа могут подвергаться дополнительной отсеивающей фильтрации перед низкочастотной фильтрацией с целью устранения систематической погрешности или смещения. После пропускания через два указанных фильтра выходные сигналы гироскопа можно сравнивать друг с другом на предмет соответствия, и любой гироскоп, выдающий выпадающее значение, можно считать отказавшим. Звуковой и световой предупредительные сигналы могут посылаться в автопилотный блок обработки и индикации данных (ADPU) 28 на приборной панели 20 (фиг. 1). Для этого может использоваться гаптическая обратная связь, например, такая как вибрация ручки управления, сама по себе, или в сочетании с другими индикациями предупредительного сигнала. В одном из возможных вариантов осуществления изобретения секция сигнализации 150 может содержать световые индикаторы состояния, лучше видимые на увеличенном вложенном изображении ADPU на фиг. 1, включающие в себя световые индикаторы зеленого цвета (“Нормально”), желтого цвета (“Осторожно”) и красного цвета (“Отказ”), а также сдвоенные устройства звуковой сигнализации для обеспечения индикации состояния системы. Устройства звуковой сигнализации, так же как и световые индикаторы состояния, обеспечивают индикацию состояния системы и выдачу сигналов о неисправности. Как световые индикаторы состояния, так и устройства звуковой сигнализации связаны непосредственно с процессорами МСР. В некоторых вариантах осуществления изобретения звуковые сигналы и/или сигналы оповещения могут передаваться по звуковой системе вертолета, так что пилот может слышать выдаваемые предупреждения по шлемофону, так же, как и сигналы, поступающие от ADPU. Дополнительно к световым индикаторам состояния и звуковым устройствам индикации предусмотрен дисплей, на котором отображаются текущие параметры режима автопилота, такие как информация о включении системы, курс, высота, гироскопический курс с магнитной коррекцией, путевая скорость вертолета и любые аварийно-сигнальные сообщения системы. Кроме того, на панели расположена кнопка тестирования, с помощью которой производится запуск инициированного встроенного теста (IBIT).
Автопилот 12 может быть выполнен таким образом, чтобы генерировать сигналы управления приводами на основании набора сигналов датчиков, который используется процессорами МСР для управления полетом вертолета в одном из нескольких режимов полета, выбираемом пилотом. Процессоры МСР могут также генерировать выходной сигнал для гироскопа с коррекцией, на основании не более, чем того же набора выходных сигналов датчиков. Как будет показано ниже, автопилотный дисплей может показывать пилоту информацию по автопилотному режиму полета, выдавая пилоту выходные данные корректируемого гироскопа, на основании указанного выходного сигнала гироскопа с коррекцией. Автопилотный дисплей может быть выполнен на едином экране, хотя это и не обязательно, на который одновременно выводится информация по автопилотному режиму полета и указанные выходные данные гироскопа с коррекцией. В одном из вариантов осуществления изобретения для генерирования указанных выходных данных гироскопа с коррекцией блок датчиков включает в себя гиродатчик угловой скорости рыскания, который выдает выходные данные по угловой скорости рыскания. Процессоры МСР осуществляют интеграцию выходных данных по угловой скорости рыскания, чтобы генерировать курс по рысканию. Поскольку гиродатчик угловой скорости рыскания демонстрирует значительное смещение, особенно при использовании МЭМС-датчика угловой скорости, и единственный датчик рыскания не определяет истинную угловую скорость рыскания при развороте с креном, процессоры МСР производят периодически обновление данных курса по рысканию с целью компенсации смещения и погрешностей угловой скорости рыскания. В одном из возможных вариантов осуществления изобретения блок датчиков содержит GPS, который генерирует курс GPS, а процессорное устройство периодически обновляет данные курса по рысканию на основании данных по курсу GPS. Еще в одном из возможных вариантов осуществления изобретения блок датчиков содержит магнитометр, который генерирует сигнал магнитного курса, и процессорное устройство периодически обновляет данные курса по рысканию на основании магнитного курса.
Еще в одном варианте осуществления изобретения для получения выходных данных гироскопа с коррекцией блок датчиков включает в себя трехосевой гиродатчик угловой скорости и трехосевой акселерометр, а процессорное устройство формирует данные пространственного положения вертолета, включающие курс по рысканию. Пространственное положение вертолета может определяться внутренним контуром автопилота практически мгновенно с помощью указанного набора выходных данных датчиков. В одном из вариантов осуществления изобретения пространственное положение может контролироваться или отслеживаться внутренним контуром с помощью интеграции выходных данных датчиков угловой скорости. Еще в одном варианте осуществления изобретения внутренний контур может определять пространственное положение вертолета на основе матрицы направляющих косинусов. Последнюю можно с равным успехом назвать матрицей поворота, которая характеризует одну систему координат относительно другой в плане поворота. Входные данные гиродатчика угловой скорости используются в качестве интегрируемых входных данных для определения пространственного положения вертолета. В связи с этим, все определения можно делать в терминах векторных произведений и скалярных произведений. В любом случае, поскольку определяемый курс по рысканию подвержен смещению по скорости рыскания, которое обнаруживается трехосевыми гиродатчиками угловой скорости, процессорное устройство, по меньшей мере периодически, производит коррекцию курса по рысканию с целью компенсации смещения угловой скорости рыскания и формирования выходных данных корректируемого гироскопа. Курс по рысканию может периодически обновляться либо на основе магнитного курса, либо на основе курса GPS.
В связи с вариантом исполнения внутреннего контура управления, который определяет пространственное положение вертолета, следует учитывать, что индикация показаний датчика положения по крену-тангажу или авиагоризонта может производиться с использованием только тех датчиков, которые используются автопилотом. Авиагоризонт, как правило, показывает ориентацию вертолета по крену хорошо известным способом в виде наклоняющейся линии горизонта на дисплее, а индикация тангажа на дисплее производится путем смещения линии горизонта вертикально вверх или вниз. При подъеме носа вертолета вверх линия горизонта смещается вниз, и наоборот, при опускании носа вертолета происходит поднятие линии горизонта вверх. В одном из возможных вариантов осуществления изобретения дисплей 500 может показывать авиагоризонт без индикации гироскопа с системой коррекции. Еще в одном варианте осуществления изобретения может производиться индикация как гироскопа с системой коррекции, так и авиагоризонта, при наличии достаточного пространства на дисплее. Разумеется, возможен вариант, при котором индикация авиагоризонта будет производиться на отдельном дисплее. В некоторых вариантах осуществления изобретения автопилотный дисплей может переключаться с дисплея корректируемого гироскопа на дисплей авиагоризонта. В качестве неограничивающего примера, автопилотный дисплей может автоматически переключаться на авиагоризонт, например, при обнаружении необычного пространственного положения вертолета, которое, например, может иметь место в аварийной ситуации.
Процессоры МСР могут также считывать данные датчика Холла от электромоторов приводов, которые могут использоваться для индикации текущего положения каждого привода, и командный сигнал, поступающий от автопилотного дисплейного процессора (ADP), являющегося частью автопилотного блока обработки и индикации данных (ADPU). В связи с этим, автопилотный блок обработки и индикации данных выполняет функцию внешнего контура управления, служащего для генерирования командных сигналов для внутреннего контура управления. С помощью всех этих данных, каждый процессор МСР вычисляет управляющий сигнал для электродвигателей в виде ШИМ (широтно-импульсной модуляции) и направления вращения. Каждый процессор также использует данные датчика Холла для управления подключением питания к соответствующим бесщеточным электродвигателям. Каждый процессор МСР сравнивает свой командный сигнал ШИМ и направление вращения для приводов управления по тангажу и крену с командами, генерированными остальными двумя процессорами МСР для согласования. Поскольку все процессоры используют одни и те же данные для вычисления командных сигналов электродвигателей, они должны давать идентичные выходные сигналы. Сигналы для совпадения/несовпадения с сигналами других двух процессоров посылаются в блок 200, где отключается управляющий входной сигнал любого процессора МСР в случае его несовпадения с сигналами двух остальных процессоров МСР.
Каждый привод содержит электродвигатель А и электродвигатель В. Управление каждым отдельным электродвигателем осуществляется одним процессором МСР. Таким образом, управление электродвигателями производится только процессорами МСР А и МСР В. В частности, процессор МСР А управляет электродвигателем А в приводе 60а управления по тангажу и приводе 60b управления по крену, а процессор МСР В управляет электродвигателем В в приводе 60а управления по тангажу и приводе 60b управления по крену. Процессор МСР С (третий процессор) не управляет электродвигателями, а выполняет все необходимые вычисления для генерирования командных сигналов ручки управления, как если бы управление двигателями осуществлялось с ее помощью. Например, если процессор МСР А и процессор МСР С соглашаются на управление электродвигателем тангажа, а процессор МСР В не соглашается, то процессор МСР В исключается из управления электродвигателем тангажа; при этом процессор МСР В все еще будет управлять электродвигателем крена, до тех пор пока процессор МСР А и процессор МСР С не исключат его также из управления данным электродвигателем. С другой стороны, если процессор МСР С исключен, ни один из электродвигателей приводов не будет задействован, но будут поданы предупредительные световой и звуковой сигналы, как было бы в случае с процессорами МСР, которые управляют электродвигателями.
Приводы управления выполнены таким образом, что любой из электродвигателей А или В может независимо приводить в действие привод для управления вертолетом. Выходной вал неисправного электродвигателя будет вращаться оставшимся электродвигателем. Если один из процессоров МСР А или МСР В исключается, автопилот продолжит действовать, несмотря на то, что каждый из этих процессоров МСР управляет электродвигателями. Как уже указывалось, может подаваться предупреждающий световой сигнал и краткий звуковой сигнал для уведомления пилота о неисправности автопилота.
Процессоры МСР полностью ответственны за управление, и их скорость ограничивается только естественным быстродействием системы, которое составляет около 5 дюйм/сек (12,7 см/сек). Процессорный блок или внутренний контур управления является единственной частью автопилота, которая может создавать критические или главные неисправности, по меньшей мере частично, вследствие скорости перемещения ручки управления. Соответственно, блок процессоров управления приводами (MCPU) имеет трехкратное резервирование с программным обеспечением уровня DAL А для управления работой внутреннего контура автопилота. Эти факторы значительно снижают вероятность возникновения критического отказа. Однако заявители отдают себе отчет в том, что программное обеспечение, соответствующее внешнему контуру, может быть отделено от программного оборудования внутреннего контура, таким образом, чтобы ПО внешнего контура могло бы иметь более низкий уровень DAL С. На ПО внешнего контура основана работа автопилотного дисплейного процессора (ADP) автопилотного блока обработки и индикации данных (ADPU) 28. Процессоры МСР преобразуют требуемые команды автопилота из автопилотного дисплейного процессора в управляющие сигналы приводов, которые могут приводить в действие электродвигатели приводов в определенных границах рабочих условий. В этой связи следует отметить, что программным обеспечением DAL управляют трехкратно резервированные процессоры МСР, в программное обеспечение DAL С внешнего контура управляется совсем другим процессором. В порядке дальнейшего разъяснения следует отметить, что на каждом процессоре МСР запускается один исполняемый файл. Процессоры МСР, которые можно назвать триплексными процессорами, могут работать на таком же ПО. Таким образом, законы управления автопилота для автопилотного дисплейного процессора ADP и триплексных процессоров являются разными. Автопилотный дисплейный процессор ADP определяет динамику внешнего контура и режимы работы автопилота, а триплексные процессоры МСР определяют динамику внутреннего контура. Законы управления внешнего контура относятся к навигационным функциям, в то время как законы управления внутреннего контура относятся к практически мгновенному управлению пространственным положением вертолета. Кроме того, автопилотный дисплейный процессор ADP обеспечивает графический и тестовый интерфейс пилота с автопилотом и выполняет законы управления автопилота для определения команд для приводов на основании данных датчиков и GPS. Соответственно, этот процессор взаимодействует непосредственно с GPS и трехосевыми магнитометрами, а также косвенно с трехосевыми акселерометрами и трехосевыми гиродатчиками скорости процессоров МСР, которые обеспечивают данные по рысканию, положению по крену и тангажу, положению, высоте полета, путевой скорости, позиции, высоте, путевой скорости, маршруту и курсу полета. Автопилотный дисплейный процессор ADP контролирует состояние этих датчиков, но не проверяет правильность данных. Переключатель инициированного встроенного теста IBIT также соединен с автопилотным дисплейным процессором ADP.
Процессоры МСР получают от ADP данные, которые включают в себя команды, а также данные от внешнего GPS. Эти данные могут проверяться каждым процессором МСР с целью обнаружения ошибок или сбоев. Управляющая команда представляет собой передаточное число по угловой скорости, ограниченное процессорами МСР. Процессоры МСР не позволят команде, поступающей от автопилотного дисплейного процессора ADP, привести к опасной реакции вертолета. Данные GPS используются как в процессорах МСР, так и в автопилотном дисплейном процессоре ADP. Данные GPS и магнитометров используются в процессорах МСР для устранения погрешностей ухода, относящихся к датчикам скорости каждого комплекта датчиков, и для определения крена, тангажа и курса. Данные GPS также могут проверяться на наличие ошибок.
Процессоры МСР осуществляют непрерывный контроль для обнаружения внутренних и внешних ошибок. В случае отказа ADP любой из процессоров МСР может немедленно распознать ситуацию на основании соответствия скорости обновления данных и управляющего сигнала. В ответ блок процессоров управления приводами MCPU, в одном из вариантов осуществления изобретения, заставит внутренний контур удерживать вертолет в прямом горизонтальном полете. Еще в одном варианте осуществления изобретения блок процессоров управления приводами MCPU может работать как система SAS (система автостабилизации) и осуществлять управление вертолетом по внутренним сигналам скорости. Процессоры МСР будут пытаться удерживать пространственное положение вертолета, а также задействуют световой и звуковой сигналы индикации для оповещения пилота о наличии отказа. Эмпирически доказано, что вертолет может совершать длительный полет с помощью лишь одного процессора МСР, что обеспечивает более чем достаточное время для пилота для взятия управления на себя и отключения автопилота. Возможность выявления чрезмерной чувствительности автопилота базируется на триплексных двигательных контроллерах. Триплексные процессоры осуществляют контроль датчиков и их проверку, для подтверждения того, что расчетная чувствительность находится в установленных пределах. Поступающие от ADP командные сигналы по тангажу и крену ограничиваются за счет фильтрации данных команд каждым триплексным процессором. Каждый триплексный процессор может выявить факт превышения заданного предела и инициировать безопасное отключение автопилота. Контроль команд по тангажу и крену может производиться идентично, но с различными предельными значениями. Устройства контроля являются динамическими; иными словами, предельные значения могут зависеть от частоты или скорости. Элементы управления резервированием по каждой оси могут включать в себя ограничение скорости перемещения ручки управления и контроль угловой скорости вертолета.
Каждый процессор МСР может иметь независимый источник питания. Полный отказ общей системы электропитания вертолета может вызвать блокирование приводов управления в определенном положении на период времени порядка 5 секунд за счет свойства динамического торможения, которое описано в отдельной патентной заявке. Данного периода времени продолжительностью 5 секунд вполне достаточно для того, чтобы пилот мог взять управление на себя. В связи с этим, автопилот не дает ручке продольно-поперечного управления “болтаться” при прекращении управления в результате отказа системы питания. Однако даже несмотря на то, что приводы управления заблокированы, пилот все-таки может осуществлять управление вертолетом, так как в системе предусмотрены тяги ручного (ограниченного) управления по тангажу 300а (см. фиг. 1) и крену 300b (см. фиг. 1 и 2) между каждым приводом и ручкой продольно-поперечного управления. Эти тяги являются жесткими при усилиях ниже усилий смещения/страгивания и эластичными при более высоких усилиях, что позволяет пилоту безопасно маневрировать и совершать посадку вертолета даже при отключении системы. Было эмпирически доказано, что пилот может осуществлять управление вертолетом, включая висение и посадку с обоими приводами управления в заблокированном состоянии. Состояние блокировки достигается замыканием всех обмоток приводных двигателей и используется при динамическом торможении, раскрытом в совместно рассматриваемой патентной заявке США №13/763,574 (номер патентного реестра НТК-2), включенной в настоящую заявку во всей своей полноте посредством ссылки. Тяги ручного управления подробно раскрываются в отдельной патентной заявке. В вертолете, в котором не используется гидравлическое сопряжение с ручкой продольно-поперечного управления, циклические виброизоляторы 302а (по тангажу) и 302b (по крену) могут быть расположены на выходном валу каждого привода. При необходимости, эти виброизоляторы можно использовать в вертолете с гидравлическим управлением циклическим шагом несущего винта, поскольку гидросистема обычно обеспечивает демпфирование циклической вибрации. Виброизоляторы уничтожают два колебательных движения за оборот, которые имеются в тяге управления вертолета R22 и других легких вертолетов, чтобы предотвратить воздействие вибрационных нагрузок на систему управления винтокрылого ЛА и повысить усталостную долговечность компонентов привода. Циклические виброизоляторы подробно раскрываются в отдельной патентной заявке.
Комплект датчиков каждого процессора МСР может также включать запоминающее устройство (ЗУ), например, такое как стираемое программируемое постоянное ЗУ (ЭСППЗУ), или какое-либо другое соответствующее ЗУ. Если процессор МСР обнаруживает ошибку в процессе работы, код ошибки может быть сохранен в ЭСППЗУ комплекта датчиков, относящегося к данному процессору МСР. Позже может быть произведено считывание ЭСППЗУ с целью выявления причины отказа. ЭСППЗУ также могут содержать параметры, характерные для модели вертолета, на котором установлен данный автопилот, например, постоянные контуров управления и величины смещений датчиков.
На фиг. 4 показано увеличенное перспективное изображение ручки продольно-поперечного управления 18. Переключатели 400 и 402 позволяют пилоту выборочно изменять частоты на установленном производителем блоке навигации и связи (не показан). Переключатель 400 служит для изменения частоты связи, в то время как переключатель 402 служит для изменения частоты навигации. Такой радиоблок позволяет пилоту вводить новые частоты в резервный канал для навигации и связи. При нажатии на соответствующий переключатель происходит взаимная замена активных и резервных частот. Затем пилот может перепрограммировать резервную частоту или сохранить старую частоту, если он решит повторно ее использовать. Ручка продольно-поперечного управления 18 содержит также вышеупомянутый переключающий блок 26 с переключателем включения-отключения 450 и триммерным переключателем 460. Последний также можно назвать “цилиндровый” переключателем вследствие его внешней формы. Электропроводка к переключающему блоку может быть проложена по ручке управления наряду с уже имеющейся электропроводкой. Как показано на фиг. 3, компоненты коммутационного модуля 26 электрически соединены с блоком процессоров управления приводами MCPU для контроля процессорами МСР. Задействование переключателя 450 переводит автопилот во включенное состояние, если в данный момент он был отключен, или наоборот, выключает его, если в данный момент он был включен. Цилиндровый переключатель 460 содержит четыре контакта, которые можно назвать левым, правым, верхним и нижним в соответствии с их положением на чертеже, которые реагируют аналогично ручке управления на боковые смещения данной кнопки переключателя, имеющей вид, подобный шляпе «цилиндру». Пятая функция данного переключателя задействуется при нажатии на него непосредственно вниз. Это действие приведет к возможности приведения в действие одного, двух, трех или всех четырех переключателей. Цилиндровый переключатель выполняет функцию триммерного переключателя благодаря его работе на определенных режимах полета вертолета. Например, в одном режиме работы отклонение данного переключателя вверх (в соответствии с изображением на фиг.4 приводит опускание носа вертолета вниз и снижение, а при отклонении данного переключателя вниз начитается набор высоты. Аналогичным образом, отклонение переключателя 460 вправо приводит к поворачиванию вертолета направо, а отклонение переключателя влево приводит к повороту налево. В режиме висения отклонения данного переключателя вверх-вниз и влево-вправо приводит к увеличению соответствующей скорости перемещения вперед-назад и влево-вправо. При нажатии или задавливании переключателя прямо вниз для включения нескольких триммерных переключателей автопилот переключает режимы работы, например, выполняет переключение с режима выдерживания скорости/маршрута на режим выдерживания высоты/маршрута. В одном из возможных вариантов осуществления изобретения при задавливании цилиндрового переключателя демонстрируется меню выбора режима. После этого отклонение переключателя вбок позволяет производить выбор с помощью меню. Задавливание (нажатие на цилиндровый переключатель) в конкретном выбранном режиме приведет к задействованию данного режима. После выбора режима отклонения переключателя вверх-вниз и влево-вправо будут обеспечивать дальнейшую корректировку параметров полета, относящихся к данному режиму.
Как показано на фиг. 1 (в качестве неограничивающего примера), автопилот 12 может иметь, по меньшей мере, шесть нормальных режимов работы, которые будут подробно описаны ниже. Доступные режимы могут зависеть от путевой скорости (GS) и/или приборной скорости винтокрылого ЛА и могут показываться на экране 500 автопилотной индикаторной панели 28. Некоторые режимы включаются при задействовании системы, а некоторые включаются с помощью цилиндрового переключателя 460 (фиг. 4).
Перейдем к рассмотрению фиг. 5, на котором приведена схематическая диаграмма, в целом обозначаемая ссылочной позицией 500, путевой скорости и/или приборной скорости 502 (в узлах) для нескольких режимов полета на автопилоте, в число которых входят режим стабилизации высоты 504, режим стабилизации скорости 506, режим стабилизации положения 510, режим висения 512 и режим GPS 514. Следует отметить, что в рассматриваемом варианте осуществления изобретения режим стабилизации высоты полета и режим GPS идентичны. Индикаторная воздушная скорость 520 (в узлах) также известна, но в данном примере предполагается, что она соответствует путевой скорости 502, т.к. в данном примере нет каких-либо связанных с этим ограничений. Доступность любого из вышеупомянутых режимов обозначается с помощью двунаправленных стрелок для обозначения соответствующих диапазонов скоростей, показанных смещенными относительно путевой скорости 502 в целях иллюстрации. В некоторых вариантах осуществления изобретения диапазоны скоростей режимов могут быть доступными при определенной индикаторной воздушной скорости, которая может значительно отличаться от путевой скорости, основанной на показаниях GPS. Следует отметить, что, несмотря на то, что режим стабилизации положения и режим висения отличаются по своим летным характеристикам, они могут быть похожими, по меньшей мере, по своим диапазонам скоростей. Следует также отметить, что конечные точки различных диапазонов скоростей показаны лишь в качестве примеров, и данные точки могут сдвигаться для конкретных установок или моделей вертолета. Режим стабилизации высоты полета 504 работает на передней стороне кривой мощности с конечными точками диапазона скоростей, которые зависят от конкретного вертолета. Для вертолета R22 в качестве неограничивающего примера, конечные точки диапазона скоростей передней стороны кривой мощности могут изменяться, например, от 65 узлов (120,38 км/час) (точка минимального лобового сопротивления на кривой мощности) приблизительно до 90 узлов (166,68 км/час). При этом практический нижний предел передней стороны кривой мощности для вертолета R22 составляет приблизительно 65 узлов (120,38 км/час); данный предел выбран с целью обеспечения коэффициента надежности. При сильном ветре пилот должен следить за показаниями индикатора воздушной скорости вертолета, чтобы быть уверенным, что пределы воздушной скорости не превышаются. Аналогичным образом, фактический верхний предел составляет 104 узла (192,61 км/час), так что выбор скорости 90 узлов (166,68 км/час) обеспечивает дополнительный запас безопасности. Режим стабилизации скорости полета 506 находится в диапазоне конечных точек от нижнего предела 20 узлов (37,04 км/час) до верхнего предела 90 узлов (166,68 км/час). При этом часть режима стабилизации скорости полета от 25 узлов (46,30 км/час) до 20 узлов (37,04 км/час) доступна только при снижении скорости в режиме стабилизации скорости полета от начальной скорости 25 узлов (46,30 км/час) или более, как будет показано ниже. Как в режиме удержания положения 510, так и в режиме висения 512 соответствующий диапазон доступных путевых скоростей составляет от -17,5 узлов (-32,41 км/час) (полет назад) до 25 узлов (46,30 км/час). Следует также отметить, что задача в режиме удержания положения заключается в висении с нулевой скоростью на определенной высоте. Совпадение диапазона скоростей 510 с режимом удержания положения говорит о том, что режим удержания положения доступен для выбора в данном диапазоне скоростей. Однако после выбора автопилот пытается удерживать нулевую путевую скорость в данном географическом положении, например, в то время, когда был сделан данный выбор. В режиме висения пилот может выбирать любую скорость в пределах диапазона 512 для работы, таким образом, что вертолет перемещается над землей с выбранной скоростью висения, включая, в том числе, по меньшей мере, приблизительно нулевую скорость. Режимы GPS предназначены для работы в диапазоне скоростей 514, который совпадает с диапазоном скоростей режима стабилизация высоты, так что можно сохранять заданную высоту при полете по запрограммированному курсу над землей, проходящему между определенными географическими точками.
Снова обращаясь к фиг. 5, мы видим, что на скорости 20 узлов (37,04 км/час) при дальнейшем снижении скорости полета автопилот автоматически переходит с режима стабилизации скорости полета 506 на режим висения 512. И наоборот, начиная с режима удержания положения 510 или режима висения 512, при увеличении скорости выше 25 узлов (46,30 км/час) происходит автоматический переход на режим стабилизации скорости полета 506. Таким образом, при переключении между режимами стабилизация положения/висения и режимом стабилизации скорости полета имеется зона гистерезиса, что исключает возможность возникновения осцилляции режимов. Иными словами, при нахождении в зоне гистерезиса доступный режим или режимы зависят от того, какой режим был задействован при вхождении в зону гистерезиса. При путевой скорости ниже 20 узлов (37,04 км/час) доступны как режим висения 510, так и режим стабилизации положения 512. Как при режиме стабилизации положения, так и при полете в режиме висения автопилот может осуществлять полет назад для сохранения заданных установок. Ниже будут представлены дальнейшие подробности различных режимов вместе с изображениями экранных снимков.
Некоторые режимы работы автопилота могут включаться автоматически. Например, режим восстановления пространственного положения может включаться непосредственно после включения автопилота. Такое автоматическое включение зависит от пространственного положения вертолета в момент включения автопилота. Если в момент включения автопилота пространственное положение вертолета является необычным, автопилот возвращает вертолет в прямой горизонтальный полет. Как было указано выше, в режиме восстановления пространственного положения может производиться индикация авиагоризонта.
В качестве еще одного примера, может осуществляться автоматическое включение режима авторотации, например, при падении оборотов несущего винта ниже 97% обычной скорости. Следует также отметить, что конкретную частоту вращения (или %), при которой будет производиться включение режима авторотации, можно настраивать в соответствии с конкретным типом вертолета, на котором установлен автопилот. Для этого автопилотный блок обработки и индикации данных 28, как показано на фиг. 3, может воспринимать сигнал низкой частоты вращения 522 в качестве сигнала активации. В одном из возможных вариантов осуществления изобретения режим авторотации не может быть явно отключен пилотом, но его можно деактивировать, например, при взятии пилотом на себя управление РУДом для снижения оборотов. Варианты осуществления режима авторотации могут применяться совместно с общим аварийным приводом, раскрытым в патентной заявке США №13/479,130 (далее везде “заявка №ʹ130”), являющейся одновременно находящейся на рассмотрении заявкой того же заявителя, включенной в настоящую заявку посредством ссылки. Например, как видно из фиг. 15 заявки №ʹ130, выходной сигнал 422 логического элемента “И” 312 может использоваться в качестве активирующего сигнала взамен сигнала пониженной частоты вращения несущего винта. Кроме того, не требуется повторно активировать общий аварийный привод, если он уже был понижен общим аварийным приводом или уменьшен пилотом, и вертолет уже находится в режиме авторотации. Что касается работы в режиме авторотации, если пилот правильно настроил авторотацию, и обороты несущего винта возвращаются к нормальным, режим авторотации не производит никаких изменений по тангажу.
На фиг. 6а и 6b показан возможный вариант внешнего вида экрана 500 в режиме Программа GPS. Прежде всего, следует отметить, что каждый из описываемых здесь дисплеев режима полета и меню может включать в себя навигационную часть, содержащую шкалу 600 курса, включающую центральную линию 602, которая показывает текущий курс вертолета. В одном из возможных вариантов осуществления изобретения шкала курса может формироваться на основе выходных данных гироскопа с системой коррекции. Курс - это направление, на которое вертолет нацелен, как правило, относительно северного магнитного полюса. Под шкалой курса 600 могут находиться указатель 606 курса и индикатор 610 курса. В рассматриваемом примере шкала 600 курса, а также индикатор 610 курса показывают путевой угол HDG 298 градусов, в то время как указатель 606 курса показывает курс CRS, равный 295 град. В режиме программы GPS CRS указывает на угол над землей, который связан с участком пути между двумя точками GPS. Следует отметить, что разница в 2 градуса между значениями курса и путевого угла может объясняться, например, влиянием бокового ветра. На фиг. 6а показан возможный вариант внешнего вида дисплея 500 в режиме GPS, например, на участке полета, запрограммированного с помощью GPS, с выдерживанием высоты 1100 футов (335,28 м). На фиг. 6b показан внешний вид дисплея 500 на запрограммированном с помощью GPS участке захода на посадку, например, в зоне аэропорта. Во время режима захода на посадку (APR MODE) скорость снижения регулируется таким образом, чтобы при заходе на посадку вертолет совершал полет по определенной вертикальной траектории.
На фиг. 7а и 7b показаны возможные варианты внешнего вида дисплея 500 при режиме стабилизации высоты. В данном примере следует иметь в виду, что индикация курса CRS 606 на фиг. 6а и 6b здесь была заменена индикацией маршрута полета TRK 700. Последний показывает угол, с которым вертолет перемещается относительно земли, и который отличается от путевого угла, который представляет собой угол направления продольной оси вертолета, как правило, относительно магнитного севера. Следует отметить, что путевой угол может изменяться относительно курса или маршрута полета в зависимости от бокового ветра. На фиг. 7а показан пример внешнего вида дисплея 500 в режиме стабилизации высоты полета, когда автопилот запрограммирован на выдерживание высоты полета 1100 футов (335,28 м), и эта высота является высотой полета вертолета в данный момент. На фиг. 7b показан пример внешнего вида дисплея 500 в режиме стабилизации высоты полета в момент, когда текущая высота полета вертолета составляет 1100 футов (335,28 м), который показывает фактическую высоту ACT, но пилот задействовал цилиндровый переключатель 460 (фиг. 4), чтобы установить заданную высоту TGT, которая составляет 1500 футов (457,20 м), так что автопилот обеспечит увеличение высоты полета вертолета до значения 1500 футов (457,20 м). Данный режим зависит от кривой мощности, и, таким образом, ограничен индикаторными воздушными скоростями до 65 узлов (120,38 км/час). Данный режим также может ограничиваться индикаторными воздушными скоростями ниже максимальной индикаторной воздушной скорости, составляющей 90 узлов (166,68 км/час) для рассматриваемого примера. Как уже указывалось выше, как верхний, так и нижний пределы диапазона скоростей режима стабилизации высоты может изменяться в зависимости от конкретной модели вертолета, на котором установлен автопилот. Перемещение триммерного переключателя 460 вверх-вниз в режиме стабилизации высоты полета приводит к соответствующему увеличению или уменьшению высоты полета, в то время как триммирование вправо-влево обеспечивает корректировку маршрута полета TRK.
На фиг. 8а 8b показаны примеры внешнего вида дисплея 500 в режиме стабилизации скорости полета. На фиг.8а показан пример внешнего вида дисплея 500 в режиме стабилизации скорости полета, когда автопилот запрограммирован на выдерживание скорости полета 56 узлов (KT) (103,71 км/час), и эта высота является текущей высотой полета вертолета. На фиг. 8b показан пример внешнего вида дисплея 500 в режиме стабилизации скорости полета в момент, когда текущая скорость полета (ACT) вертолета составляет 56 узлов (103,71 км/час), но пилот задействовал цилиндровый переключатель 460 (фиг.4), чтобы установить заданную (TGT) скорость, которая составляет 65 узлов (KT) (120,38 км/час), так что автопилот обеспечит опускание носа вертолета с целью увеличения скорости полета до значения 65 узлов (KT) (120,38 км/час). Как ясно видно из фиг. 8b, пилот может скорректировать заданные значения скорости и маршрута полета с помощью цилиндрового триммерного переключателя 460. Отклонение триммерного переключателя 460 вверх или вниз приведет к соответствующему повышению или снижению путевой скорости, а отклонение триммерного переключателя вправо или влево приведет к соответствующему увеличению или уменьшению путевого угла.
На фиг. 9 показан пример внешнего вида дисплея 500 в режиме висения, доступном при скоростях до 25 узлов (46,30 км/час), при условии, что вход в режим произведен при скорости ниже 20 узлов (37,04 км/час), как показано на фиг. 5. В данном режиме производится управление скоростями полета как в продольном, так и поперечном направлениях. Скорости полета в продольном и поперечном направлениях показываются на дисплее. В данном примере показывается скорость полета вперед (FWD) 6 узлов (11,11 км/час) и скорость перемещения влево (LFT), равная 5 узлам (9,26 км/час). Режим висения дает пилоту возможность смещения в боковом направлении без движения вперед или движения в направлениях под различными углами относительно продольной оси вертолета. Функции балансировки, используя триммерный переключатель 460, могут регулировать скорость с соответствующим уравновешивающим движением: при наклоне вперед-назад - коррекция продольной скорости, при наклоне влево-вправо - коррекция боковой скорости.
На фиг. 10а 10b показаны примеры внешнего вида дисплея 500 в режиме стабилизации положения. В одном из возможных вариантов осуществления изобретения автопилот получает данные по географическому положению на момент включения данного режима (в границах диапазона скоростей 510, показанного на фиг. 5) и затем удерживает винтокрылый ЛА на данных географических координатах. Это может привести к продольному и поперечному перемещению вертолета с целью выдерживания положения. Как показано на фиг. 10а, в данный момент вертолет смещен на 50 футов (15,24 м) вперед (FWD) и на 25 футов (7,62 м) вправо (RGT) относительно заданных координат, а согласно изображению на фиг. 10b, текущее положение вертолета смещено на 50 футов (15,24 м) назад (AFT) и на 25 футов (7,62 м) влево (LFT) относительно заданных координат. Данные измерения представляют собой погрешность по положению ЛА, которая может быть результатом включения режима стабилизации положения с начальным перемещением в сторону от заданного положения. Данная погрешность затем корректируется автопилотом. Еще одной причиной погрешности по положению может являться изменение ветра, при котором пилот не в состоянии отреагировать достаточно быстро, чтобы избежать сдвига по положению. В одном из вариантов осуществления режима стабилизации положения функции триммирования могут работать так же, как и при полете в режиме висения, и, таким образом, обеспечивать повышение или понижение скорости. В данном варианте осуществления задействование триммерного переключателя приводит к включению режима висения. Таким образом, пилот может совершить маневры для перемещения в новое положение и затем повторно включить режим стабилизации положения. Еще в одном варианте осуществления режима стабилизации положения использование триммерных функций может обеспечивать сдвиг заданной географической точки, на которой пилот должен зависнуть.
На фиг. 11а представлен вариант внешнего вида дисплея 500 в режиме меню, содержащего все описанные выше режимы полета, обеспечиваемые автопилотом, включая полет в режиме висения (HVR), режим стабилизации положения (POS), режим стабилизации скорости полета (SPD), режим стабилизации высоты полета (ALT) и режим GPS (GPS). В описываемых здесь вариантах меню пилот может использовать отклонение влево-вправо цилиндрового переключателя 460 для выбора конкретного режима путем его высвечивания. Разумеется, при других форматах дисплея может быть использовать и вертикальное размещение названий режимов с перемещением цилиндрового переключателя в соответствующих направлениях. В этом плане может использоваться любой подходящий подход. В рассматриваемом примере высвечен режим стабилизации скорости (SPD). При нажатии цилиндрового переключателя возможет выбор (высвечивание) режима более чем одним переключателем. В некоторых случаях, однако, некоторые режимы являются невозможными при текущем состоянии вертолета. Соответственно, экранное меню может изменяться в соответствии с текущим режимом полета, чтобы на экран выводились только те режимы полета, которые являются доступными в настоящий момент, как будет показано ниже.
На фиг. 11b показан возможный вариант внешнего вида дисплея 500 в режиме меню, соответствующем работе вертолета на переднем участке кривой мощности, скорость на котором для рассматриваемого примера может составлять более 60 узлов (11,12 км/час). Специалистам в области вертолетостроения будет понятно, что автопилот согласно настоящему изобретению обеспечивает поднятие носовой части вертолета для обеспечения набора высоты, поскольку автопилот не обеспечивает управление общим шагом несущего винта. Такой набор высоты может быть выполнен на переднем участке кривой мощности. Таким образом, доступные режимы полета, показанные на фиг. 11b, включают режим стабилизации скорости (SPD), режим стабилизации высоты (ALT) и режим GPS. Режимы висения и стабилизации положения являются недоступными. Еще в одном варианте осуществления изобретения, однако, на заднем участке кривой мощности (приблизительно от 25 узлов (46,30 км/час) до 60 узлов (111,12 км/час) в рассматриваемом примере), дисплей 500 может быть выполнен таким образом, чтобы он показывал доступным только режим стабилизации скорости полета (SPD). При этом на заднем участке кривой мощности индуктивное аэродинамическое сопротивление является определяющим, и скорость понижена. Следует отметить, что в режиме стабилизации высоты полета автопилот обеспечивает поднятие носовой части вертолета для набора высоты. И хотя такой подход работает на переднем участке кривой мощности, он является неприемлемым на заднем участке. Таким образом, при поднятии носовой части вертолета для набора высоты будет происходить падение скорости полета, что приведет к увеличению аэродинамического сопротивления. Соответственно, располагая меньшей энергией, чем требуется, вертолет будет не набирать высоту, а снижаться. Соответственно, дисплей 500 может ограничивать выбор режимов только режимом стабилизации скорости полета (SPD) на заднем участке кривой мощности, например, если автопилот не сконфигурирован для автоматического управления общим шагом несущего винта.
На фиг. 11с показан вариант внешнего вида дисплея 500 в режиме меню, соответствующем полету вертолета с малой скоростью, обеспечивающей, как правило, возможность бокового перемещения на основе висения, которая в рассматриваемом примере может быть ниже 25 узлов (46,30 км/час). Соответственно, дисплей 500 изменен таким образом, чтобы он мог выдавать меню, обеспечивающее возможность выбора полета в режиме висения (HVR) и в режиме стабилизации положения (POS), которые могут функционировать так, как было описано выше.
На фиг. 11d показан вариант внешнего вида дисплея 500 в режиме авторотации, который активируется автоматически, как это было описано выше. Режим авторотации может быть осуществлен в соответствии с параметрами полета для управления снижением таким образом, чтобы обеспечивался требуемый воздушный поток на несущем винте для сохранения и/или повышения частоты вращения ротора для выравнивания перед приземлением. В одном из возможных вариантов осуществления режим авторотации инициализирует авторотацию, например, как было описано выше, и информирует пилота о необходимости взятия управления на себя. При этом дисплей 500 может производить индикацию авторотации 710. Данная последняя индикация может чередоваться с другими индикациями с целью информировать пилота о необходимости взятия управления на себя с последующим выключением автопилота. Другие индикации могут осуществляться одновременно. Например, на автопилотном блоке обработки и индикации данных ADPU может включаться желтый предупредительный световой сигнал, а также предупредительный звуковой сигнал. Может использоваться любая подходящая комбинация вышеупомянутых индикаций. Во время работы режим авторотации может попытаться удерживать постоянную воздушную скорость и/или угол тангажа для снижения, чтобы обеспечить достаточный набегающий поток воздуха через ротор для сохранения приемлемых оборотов ротора. В одном из вариантов осуществления режим авторотации может включаться только автоматически. Еще в одном варианте осуществления изобретения режим авторотации может предлагаться в меню в целях обучения и тренировки. Например, выбор режима авторотации может быть добавлен в меню выбора режимов, показанном на фиг. 11а.
На фиг. 12 показан вариант способа обеспечения настраиваемого меню автопилота, обозначенного в целом ссылочной позицией 1200 и основанного, по меньшей мере, частично, на приведенном выше описании. Способ начинается в начале 1201 и продолжается до момента 1202, после которого продолжается работа автопилота в текущем состоянии или в режиме по умолчанию. В 1203 автопилот сравнивает текущую статистику полета с заданным набором ограничений, которые могут иметься для каждого режима. В качестве неограничивающего примера, если автопилот в настоящий момент работает в режиме стабилизации высоты полета, он может определить, работает ли вертолет на заднем участке кривой мощности. Такая работа может иметь место, например, при уменьшении пилотом общего шага несущего винта (специально или непреднамеренно) при одновременном уменьшении воздушной скорости. В качестве еще одного примера, вертолет может встретиться с воздействием попутного ветра, так что показания путевой скорости могут указывать на то, что вертолет работает на переднем участке кривой мощности, что, на самом деле, является неправильным, если взглянуть на показания фактической воздушной скорости. Тот факт, что вертолет находится на заднем участке кривой мощности, может быть определен любым подходящим способом, например, по показаниям воздушной скорости и/или по факту невозможности выдерживания высоты на основании величины потери высоты и/или скорости снижения. При выявлении состояния выхода за пределы допустимых значений автопилот автоматически включает режимы в 1204. В рассматриваемом примере автопилот может переключаться с режима стабилизации высоты полета на режим стабилизации скорости полета. Затем автопилот может осуществлять либо выдерживание скорости в момент обнаружения, либо произвести повышение скорости на величину, достаточную для перемещения на передний участок кривой мощности.
Рассмотрев работу этапов 1203 и 1204 в плане режима стабилизации высоты полета, приступим к рассмотрению предельных значений для других режимов. При обнаружении того факта, что воздушная скорость вертолета ниже 20 узлов (37,04 км/час), этап 1204 может перевести вертолет из любого режима в режим висения. Если в настоящий момент вертолет находится в режиме висения, и воздушная скорость выше 25 узлов (46,30 км/час), на этапе 1204 производится автоматический перевод автопилота на режим стабилизации скорости полета. Следует отметить, что если на этапе 1203 будет определено, что параметры работы в текущем режиме выходят за пределы допустимых значений, пилоту будет послано соответствующее уведомление.
Если на этапе 1203 будет определено, что параметры текущего режима не выходят за пределы допустимых значений, работа продолжается до этапа 1206, на котором автопилотный дисплейный процессор ADP контролирует выбор пилотом входа в режим меню. Если такой выбор не будет сделан, работа автоматики возвращается на этап 1202. При обнаружении выбора меню работа продолжается до этапа 1208, на котором производится определение полетного статуса вертолета. Текущая воздушная скорость или путевая скорость могут использоваться совместно, например, с информацией относительно модели вертолета, на котором установлен данный автопилот. Такая информация может включать, например, верхний и нижний пределы различных диапазонов скоростей, связанных с режимами автопилота, представленными на фиг. 5. Затем работа продолжается до этапа 1210, на котором производится выбор меню на основании текущего статуса полета, определенного на этапе 1208. Соответствующие варианты выбора могут включать, в том числе, варианты, показанные на фиг. 11а-11с, наряду с их измененными вариантами. На этапе 1212 производится отображение измененного меню для пилота. На этапе 1214 определяется, был ли произведен выбор из измененного меню. Если выбор был произведен, то работа переходит на этап 1218. При этом следует иметь в виде, что измененное меню может давать автопилоту возможность повторного включения режима, в котором он работал в момент входа в режим меню, или какого-либо другого режима. Затем автопилот может возвращаться к этапу 1202 для функционирования в новом режиме работы автопилота. Данный процесс может завершиться в любой момент при задействовании пилотом переключателя 450 (фиг. 4).
Как показано на фиг. 4, в соответствии с приведенным выше описанием вариантов меню, следует отметить, что настоящее изобретение раскрывает автопилотную систему для управления полетом вертолета с ручкой управления, приводимой в движение пилотом для ручного управления полетом вертолета рукой пилота, находящейся на данной ручке управления. Пилот может осуществлять управление и включать различные режимы автопилота, не отрывая своей руки от ручки продольно-поперечного управления или рычага управления общим шагом несущего винта. Пилот может с помощью большого пальца своей руки задействовать цилиндровый переключатель 460, не отпуская ручку управления вертолетом. Данная возможность обеспечивается, по меньшей мере, частично, за счет расположения органа функционального управления автопилотом непосредственно на ручке продольно-поперечного управления в пределах досягаемости руки пилота, находящейся на ручке продольно-поперечного управления, а также за счет обеспечения совместной работы дисплея и меню, создающего возможность переключения между различными режимами автопилота с помощью функциональных органов управления автопилотом, расположенных на ручке продольно-поперечного управления.
Приведенное выше описание было представлено в целях иллюстрации и ознакомления с настоящим изобретением. Оно не является исчерпывающим и не ограничивает настоящее изобретение каким-либо отдельным вариантом осуществления, и возможны различные другие формы и модификации, соответствующие основному принципу настоящего изобретения, которые будут очевидны специалистам в данной области.
Все вышеописанные элементы, детали и этапы предпочтительно включены. Следует иметь в виду, что любой из данных элементов, компонентов и этапов может быть замещен другими элементами, компонентами и этапами, или исключен, что должно быть очевидно специалистам в данной области.
Настоящее описание раскрывает, по меньшей мере, следующее: автопилотная система, содержащая приводное устройство, получающее управляющие сигналы для управления полетом вертолета в соответствии с выбранным одним или несколькими различными режимами полета. Устройство подачи управляющего сигнала ручки управления, обеспечивающее возможность выбора режима полета и управления вертолетом пилотом с помощью только одной руки, находящейся на ручке управления, не отрывая руки от ручки управления. Выходной сигнал корректируемого гироскопа основан только на комплекте выходных сигналов датчиков, используемых автопилотом, так что автопилотный дисплей представляет информацию по режиму полета на автопилоте, выдавая выходной сигнал корректируемого гироскопа. Автопилот обеспечивает возможность выбора пилотом одного из нескольких режимов полета, изменяемых в соответствии с текущим полетным статусом вертолета. Обеспечивается режим авторотации.
Аспекты изобретения
В настоящем описании представлены, по меньшей мере, следующие аспекты.
Аспект 1. Автопилотная система для управления вертолетом с ручкой управления, приводимой в движение с целью управления вертолетом вручную рукой пилота, находящейся на ручке управления, содержащая:
процессорное устройство для контроля полета вертолета и генерирования управляющих сигналов в соответствии с результатами указанного контроля;
приводное устройство, получающее управляющие сигналы для управления полетом вертолета в соответствии с выбранным одним или несколькими различными режимами полета; и
устройство ввода сигналов, расположенное на ручке управления, так что выбор и управление всеми режимами полета может осуществляться только одной рукой пилота, находящейся на ручке управления, без снятия руки с ручки управления, с одновременным управлением полетом вертолета.
Аспект 2. Система автопилота согласно аспекту 1, далее сконфигурированная таким образом, что выбор и управление всеми режимами полета осуществляются только от ручки управления, причем пилоту не требуется использовать для этого другую руку.
Аспект 3. Система автопилота согласно аспекту 1 или 2, устройство ввода сигналов которой содержит “цилиндровый” переключатель, служащий, по меньшей мере, для триммирования определенных режимов полета на автопилоте.
Аспект 4. Автопилот согласно аспекту 3, в котором цилиндровый переключатель расположен таким образом, что пилот может приводить его в действие большим пальцем своей руки.
Аспект 5. Автопилот согласно аспекту 3, цилиндровый переключатель которого содержит многопозиционные переключатели, так что при нажатии на указанный переключатель одновременно замыкаются два или более контакта, а указанное устройство ввода сигналов обнаруживает замыкание данных двух или более контактов и инициирует функцию выбора в соответствии с указанным обнаружением.
Аспект 6. Автопилотная система для управления вертолетом с ручкой управления, приводимой в движение с целью управления вертолетом вручную рукой пилота, находящейся на ручке управления, содержащая:
процессорное устройство для контроля полета вертолета и генерирования управляющих сигналов в соответствии с результатами указанного контроля;
приводное устройство, получающее управляющие сигналы для управления полетом вертолета в соответствии с выбранным одним или несколькими различными режимами полета; и
устройство ввода сигналов, расположенное на ручке управления, так что выбор всех режимов и управление ими осуществляется исключительно с помощью данного устройства ввода, расположенного на ручке управления.
Аспект 7. Система автопилота для управления полетом вертолета, содержащая:
сенсорное устройство, обеспечивающее набор выходных сигналов, которые характеризуют режим полета вертолета;
процессорное устройство, служащее для генерирования управляющих сигналов для приводов в соответствии с набором выходных сигналов датчиков для управления полетом вертолета в выбираемом пилотом одном или нескольких режимах полета с последующим генерированием выходного сигнала корректируемого гироскопа на основании только данного набора выходных сигналов датчиков; и
автопилотный дисплей, который может показывать пилоту информацию по автопилотному режиму полета, выдавая пилоту одновременно выходной сигнал корректируемого гироскопа на основании выходного сигнала корректируемого гиродатчика.
Аспект 8. Система автопилота согласно аспекту 7, автопилотный дисплей который представляет собой единый экран, на который одновременно выводится информация по автопилотному режиму полета и выходной сигнал корректируемого гироскопа.
Аспект 9. Система автопилота согласно аспекту 7 или 8, в которой информация по режиму полета на автопилоте основана, по меньшей мере, на одном из выходных сигналов датчиков.
Аспект 10. Система автопилота согласно аспекту 7, 8 или 9, в которой блок датчиков содержит гиродатчик скорости рыскания, выдающий выходной сигнал по скорости рыскания, причем указанное процессорное устройство суммирует последовательность выходных сигналов по скорости рыскания для генерирования курса по рысканию.
Аспект 11. Система автопилота согласно аспекту 10, в которой гиродатчик скорости рыскания показывает смещение скорости рыскания, а процессорное устройство периодически корректирует курс по рысканию с целью компенсации указанного смещения скорости рыскания.
Аспект 12. Система автопилота согласно аспекту 11, указанный блок датчиков которой содержит GPS, который генерирует курс GPS, а процессорное устройство осуществляет периодическую коррекцию курса по рысканию в соответствии с курсом GPS.
Аспект 13. Система автопилота согласно аспекту 11, указанный блок датчиков которой содержит блок магнитометров, который вырабатывает сигнал магнитного курса, а процессорное устройство производит периодическую коррекцию курса по рысканию в соответствии с сигналом магнитного курса.
Аспект 14. Система автопилота согласно аспекту 7, блок датчиков которой содержит трехосевой гиродатчик угловой скорости и трехосевой акселерометр, которые служат для создания указанного набора выходных сигналов датчиков, а указанное процессорное устройство генерирует сигнал пространственного положения вертолета, включающий в себя курс по рысканию.
Аспект 15. Система автопилота согласно любому из аспектов 7-14, процессорное устройство которой содержит внутренний контур, который практически моментально определяет указанное пространственное положение вертолета с помощью набора выходных сигналов датчиков.
Аспект 16. Система автопилота согласно аспекту 15, указанный внутренний контур в которой определяет пространственное положение вертолета на основании матрицы направляющих косинусов.
Аспект 17. Система автопилота согласно аспекту 14, у которой курс по рысканию подвержен смещению по скорости рыскания, имеющемуся в трехосевом гиродатчике угловой скорости, а процессорное устройство, по меньшей мере, периодически производит коррекцию курса по рысканию с целью компенсации смещения скорости рыскания и генерирования выходного сигнала корректируемого гироскопа.
Аспект 18. Система автопилота согласно аспекту 17, содержащая приемник сигналов GPS, который генерирует курс GPS, а процессорное устройство осуществляет периодическую коррекцию курса по рысканию в соответствии с курсом GPS.
Аспект 19. Система автопилота согласно аспекту 11, содержащая блок магнитометров который вырабатывает сигнал магнитного курса, а процессорное устройство производит периодическую коррекцию курса по рысканию в соответствии с сигналом магнитного курса.
Аспект 20. Система автопилота согласно любому из аспектов 7-19, содержащая также:
приводное устройство, получающее управляющие сигналы для приводов для управления полетом вертолета в соответствии с выбранным одним или несколькими различными режимами полета; и
устройство ввода сигналов, расположенное на ручке управления, так что выбор и управление всеми режимами полета может осуществляться только одной рукой пилота, находящейся на ручке управления, без снятия данной руки с ручки управления, с целью одновременного управления полетом вертолета.
Аспект 21. Система автопилота для управления полетом вертолета, содержащая:
процессорное устройство, служащее для определения статуса полета вертолета на основании ряда входных сигналов датчиков для управления вертолетом в одном или нескольких режимов полета, а также для обеспечения возможности выбора пилотом одного или нескольких (но не всех) режимов из предусмотренного набора режимов полета, измененного для выбора пилотом на основании текущего полетного статуса вертолета.
Аспект 22. Система автопилота согласно аспекту 21, отличающаяся тем, что режим полета вертолета соответствует кривой мощности, и указанный набор представляемых пилоту режимов полета базируется на текущем полетном статусе вертолета относительно указанной кривой мощности.
Аспект 23. Автопилот согласно аспекту 22, отличающийся тем, что указанный набор режимов полета включает в себя, по меньшей мере, режим стабилизации положения, режим висения, режим стабилизации скорости полета, режим стабилизации высоты полета и режим GPS.
Аспект 24. Автопилот согласно аспекту 23, отличающийся тем, что указанная кривая мощности содержит передний участок, и в случае, когда текущий полетный статус вертолета соответствует данному переднему участку кривой мощности, набор режимов автопилота включает в себя не более чем режим стабилизации скорости полета, режим стабилизации высоты полета и режим GPS.
Аспект 25. Автопилот согласно аспекту 23, отличающийся тем, что указанная кривая мощности содержит задний участок, и в случае, когда текущий полетный статус вертолета соответствует данному заднему участку кривой мощности, набор режимов автопилота включает в себя только режим стабилизации скорости полета.
Аспект 26. Автопилот согласно аспекту 21 или 22 отличающийся тем, что указанный набор режимов полета включает в себя, по меньшей мере, режим стабилизации положения, режим висения, режим стабилизации скорости полета, режим стабилизации высоты полета и режим GPS, а также тем, что указанный набор автопилотных режимов может быть изменен таким образом, чтобы включать в себя не более чем режим висения и режим стабилизации положения, когда указанный текущий полетный статус вертолета характеризуется низкой скоростью полета.
Аспект 27. Автопилот для вертолета, содержащего роторную систему управлением циклическим шагом несущего винта для управления полетом и способного генерировать, по меньшей мере, сигнал НИЗКИХ ОБОРОТОВ, указывающий на предельно низкую допустимую частоту вращения ротора; указанный автопилот содержит:
сенсорное устройство, обеспечивающее набор выходных сигналов, которые характеризуют режим полета вертолета;
приводное устройство, служащее для перемещения ручки продольно-поперечного управления в соответствии с одним или несколькими сигналами продольно-поперечного управления; и
управляющее устройство, получающее сигнал активации, по меньшей мере, частично основанный на сигнале НИЗКИХ ОБОРОТОВ и выходных сигналах датчиков, и по активационному сигналу автоматически включающее режим аварийного снижения для генерирования указанных сигналов циклического управления в соответствии с выходными сигналами датчиков для управления циклическим шагом несущего винта без входных управляющих сигналов от пилота, по меньшей мере, на начальном этапе снижения, по меньшей мере, для изменения угла тангажа вертолета таким образом, чтобы обеспечить начальную стабилизацию горизонтальной скорости вертолета, которая находится в определенном диапазоне независимо от заданной горизонтальной скорости полета в момент получения активационного сигнала.
Аспект 28. Автопилот согласно аспекту 27 отличающийся тем, что управляющее устройство обеспечивает увеличение угла тангажа вертолета для снижения скорости полета вперед, если данная скорость полета вперед превышает заданное предельное значение в момент получения активационного сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОПИЛОТ | 2013 |
|
RU2619675C2 |
| СИСТЕМА АВТОПИЛОТА, КОМПОНЕНТЫ И СПОСОБЫ | 2013 |
|
RU2652685C2 |
| ВЕРТОЛЕТ ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ | 2003 |
|
RU2265555C2 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| АВТОПИЛОТ ДЛЯ САМОЛЕТОВ МАЛОЙ АВИАЦИИ | 2024 |
|
RU2832351C1 |
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2013 |
|
RU2539708C1 |
| ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ПРЕДОТВРАЩЕНИЯ ВЫХОДА УГЛА ТАНГАЖА САМОЛЕТА ЗА ПРЕДЕЛЫ ЭКСПЛУАТАЦИОННОГО ДИАПАЗОНА | 2011 |
|
RU2490168C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
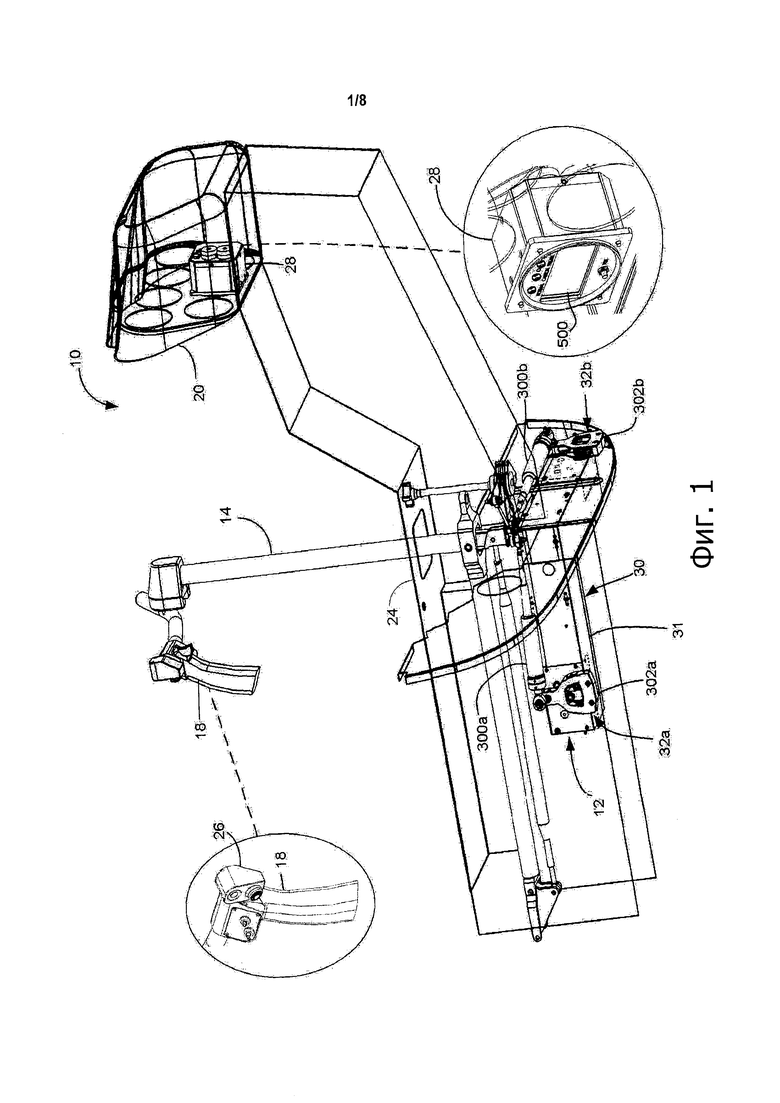
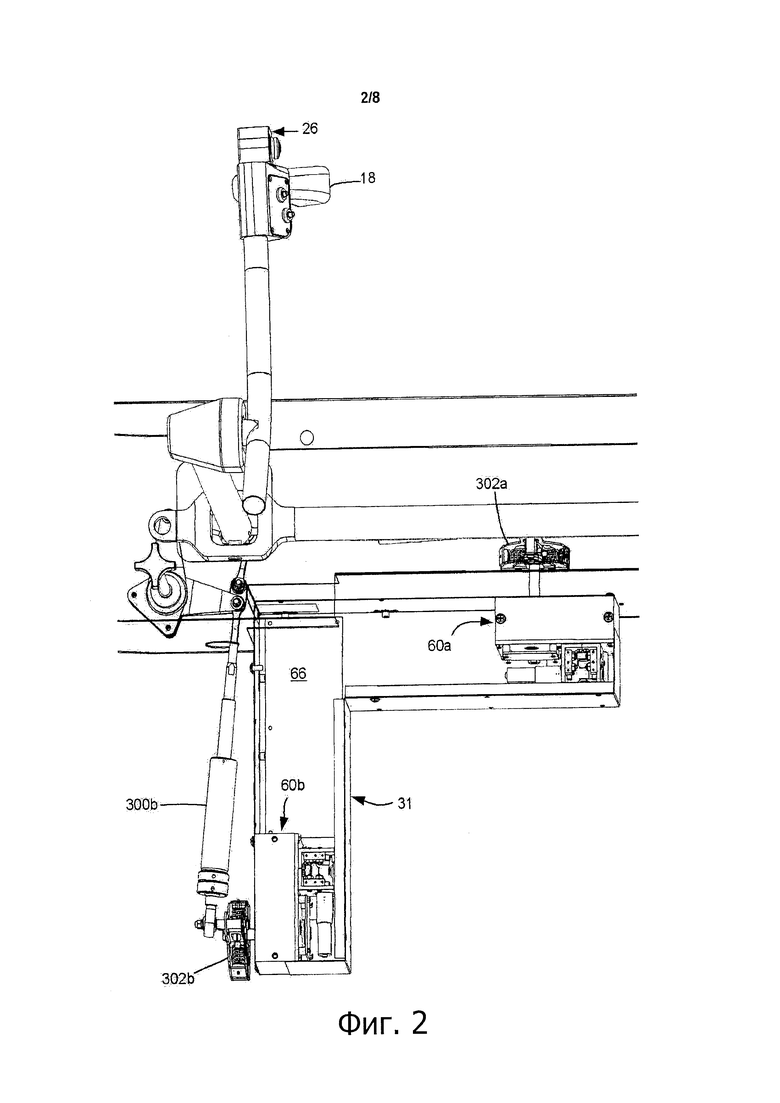
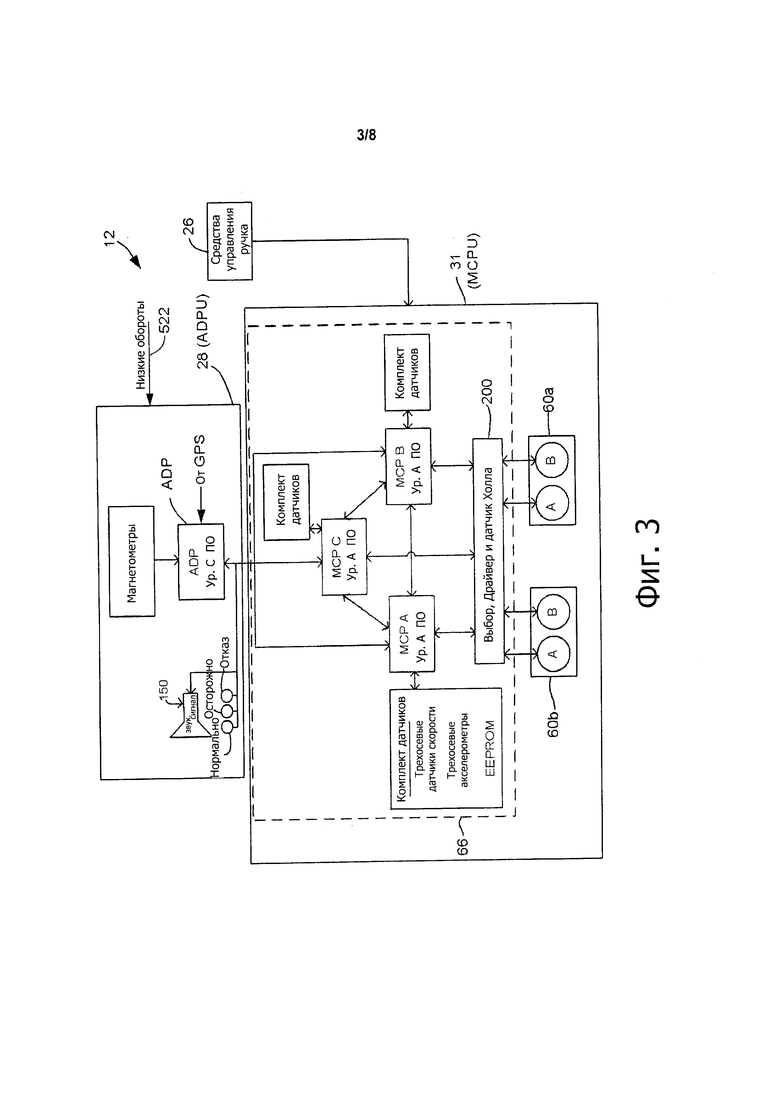
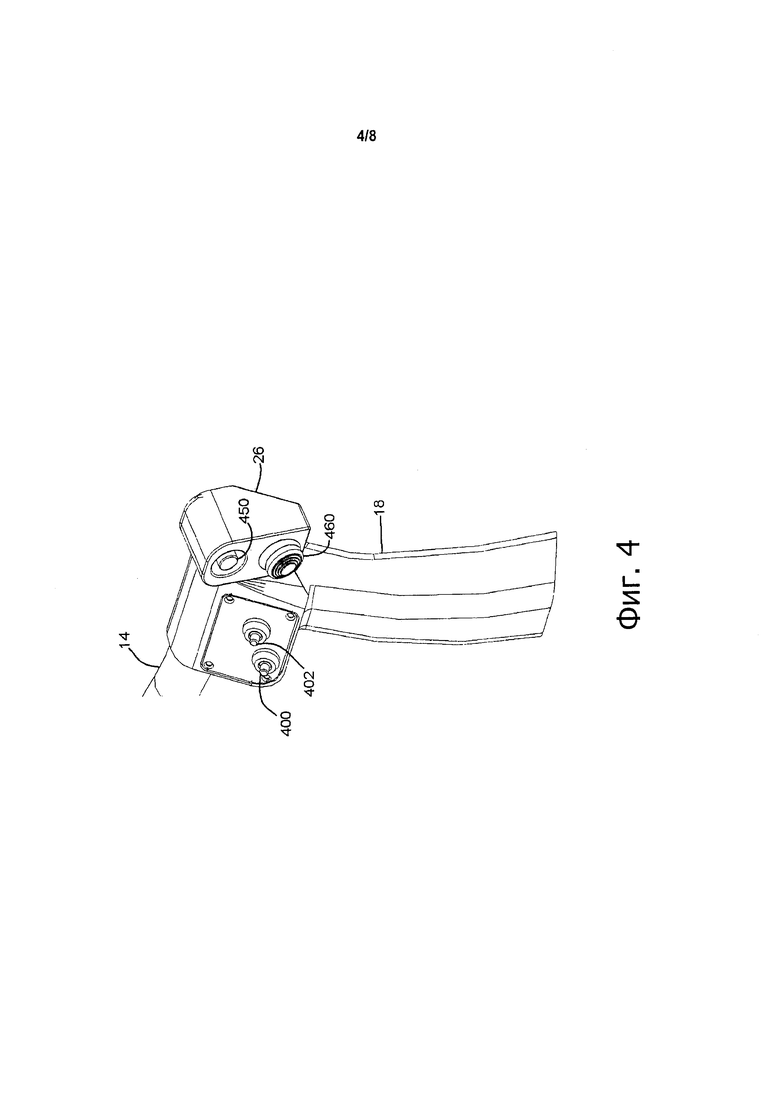
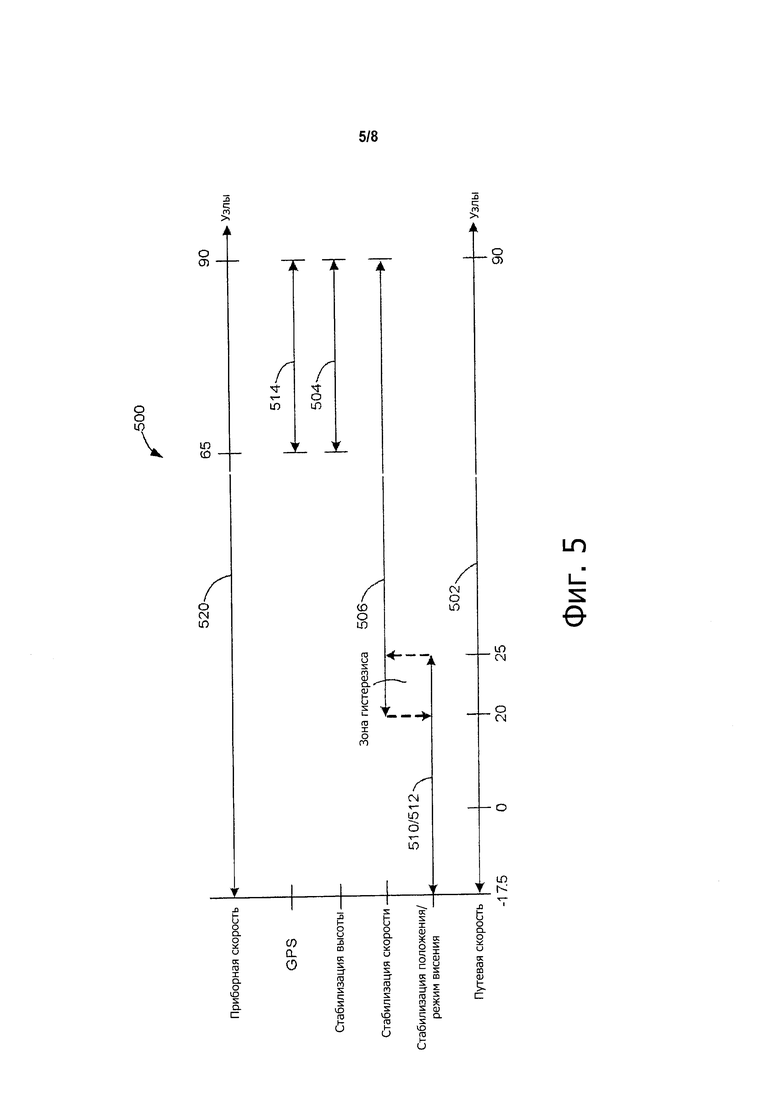
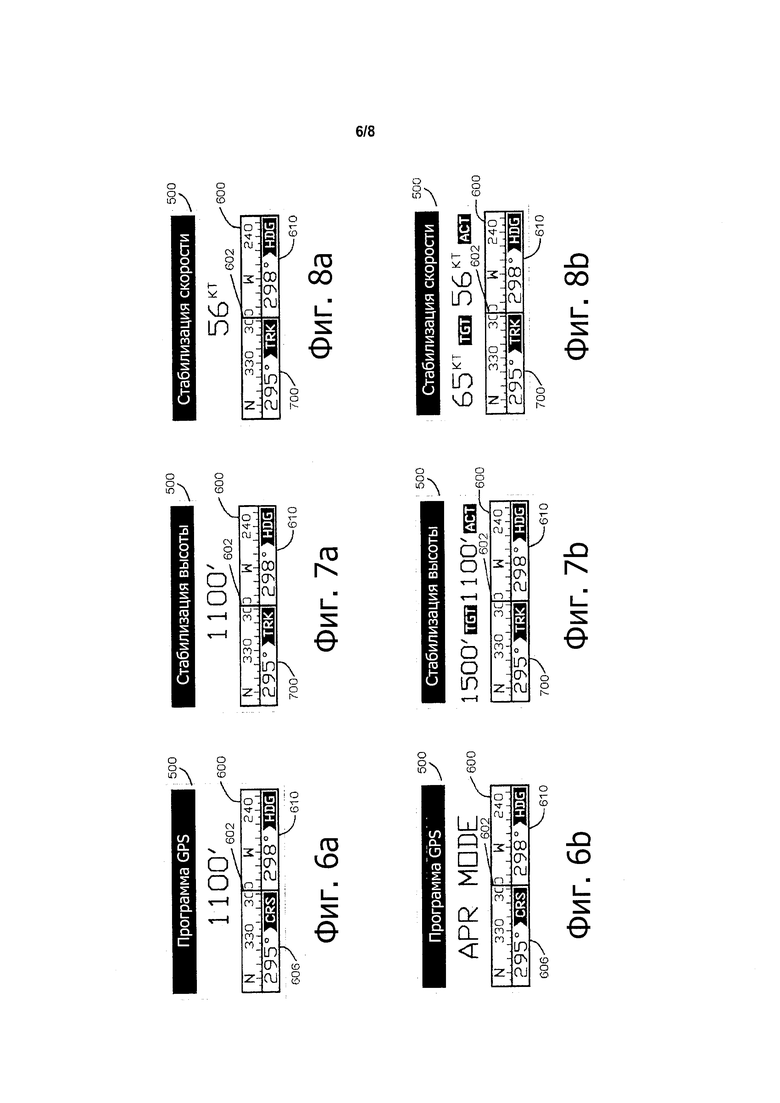
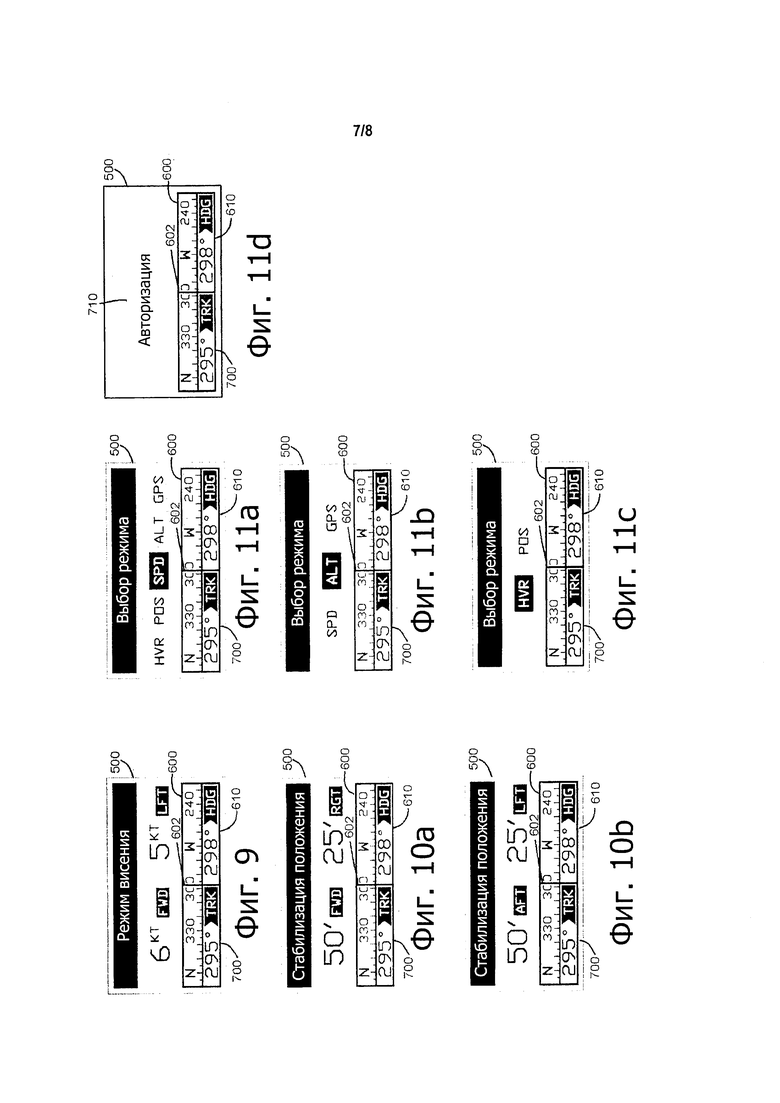
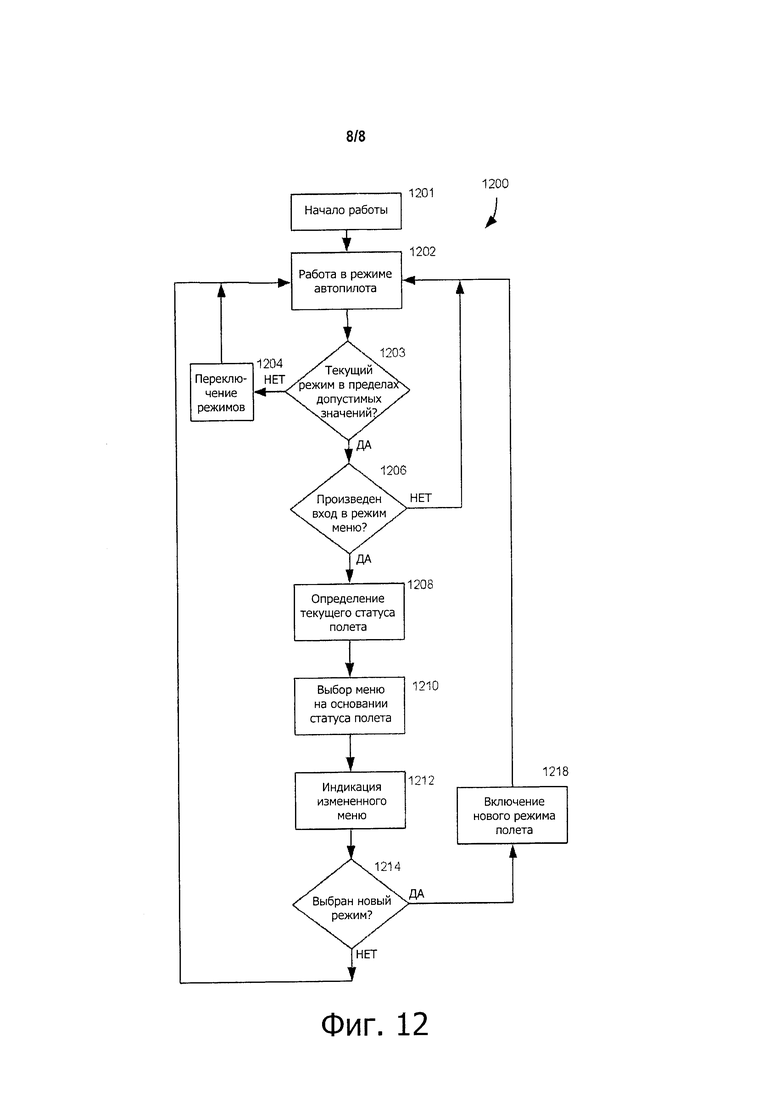
Группа изобретений относится к системам автопилота (варианты) и автопилоту для использования с вертолетом. Система автопилота для управления полетом вертолета содержит ручку циклического управления, процессорное устройство, приводное устройство, устройство ввода данных на ручке циклического управления. Система автопилота содержит сенсорное устройство, процессорное устройство, генерирующее управляющие сигналы для приводов, автопилотный дисплей. Система автопилота содержит процессорное устройство с возможностью выбора нескольких режимов полета. Автопилот для использования с вертолетом содержит систему несущего винта с циклическим управлением, сенсорное устройство, формирующее набор выходных данных датчиков, характеризующих полет вертолета, приводное устройство, управляющее устройство. Обеспечивается возможность для пилота выбора режима полета из набора указанных режимов, а также управление вертолетом только одной рукой с ручки управления. 5 н. и 23 з.п. ф-лы, 12 ил.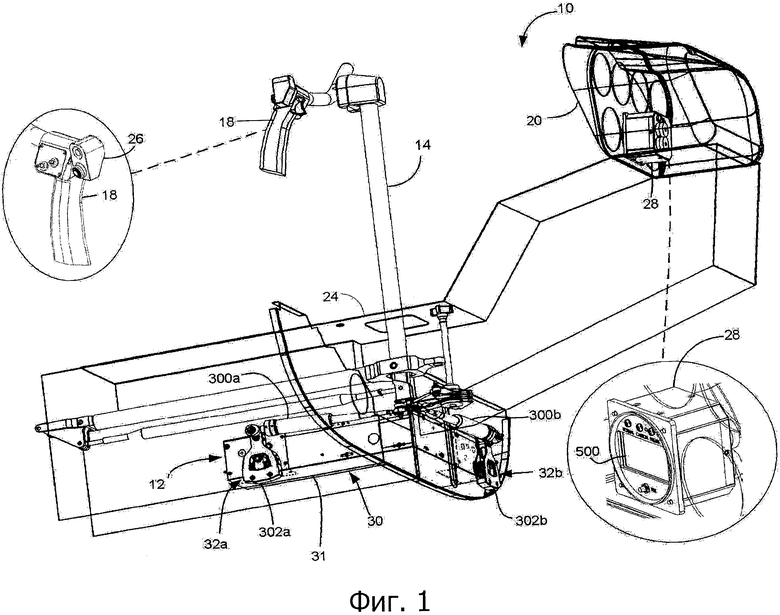
1. Система автопилота для управления полетом вертолета с ручкой циклического управления, приводимой в движение пилотом для управления вертолетом вручную, рукой пилота, находящейся на ручке циклического управления, содержащая:
процессорное устройство для контроля полета вертолета и генерирования управляющих сигналов в соответствии с указанным контролем;
приводное устройство, выполненное с возможностью приема управляющих сигналов для оказания воздействия на полет вертолета в выбранном одном из нескольких различных режимов полета; и
устройство ввода данных, расположенное на ручке циклического управления таким образом, что каждый режим полета выбирается пилотом и управление осуществляется пилотом с помощью не более чем одной руки пилота, находящейся на ручке циклического управления, без снятия руки с ручки циклического управления, при одновременном управлении полетом вертолета.
2. Система автопилота по п. 1, также выполненная таким образом, что выбор каждого режима полета и управление каждым режимом полета осуществляются только от ручки циклического управления, причем пилоту не требуется использовать другую руку.
3. Система автопилота по п. 1, в которой устройство ввода данных содержит "цилиндровый" переключатель, который выполнен с возможностью служить по меньшей мере для управления функциями балансировки в определенных режимах полета на автопилоте.
4. Система автопилота по п. 3, в котором «цилиндровый» переключатель расположен таким образом, чтобы пилот приводил его в действие большим пальцем руки.
5. Система автопилота по п. 3, в котором «цилиндровый» переключатель содержит многопозиционные переключатели, так что при нажатии на «цилиндровый» переключатель одновременно замыкаются два или более контактов, при этом устройство ввода данных выполнено с возможностью обнаруживать указанное замыкание двух или более контактов и инициировать функцию выбора в соответствии с указанным обнаружением.
6. Система автопилота для управления полетом вертолета с ручкой циклического управления, приводимой в движение пилотом для управления вертолетом вручную, рукой пилота, находящейся на ручке управления, содержащая:
процессорное устройство для контроля полета вертолета и генерирования управляющих сигналов в соответствии с указанным контролем;
приводное устройство, выполненное с возможностью приема управляющих сигналов для оказания воздействия на полет вертолета в выбранном одном из нескольких различных режимов полета; и
устройство ввода данных, расположенное на ручке циклического управления таким образом, что каждый режим полета выбирается и управление им осуществляется исключительно через контакт с указанным устройством ввода данных на ручке циклического управления.
7. Система автопилота для управления полетом вертолета, содержащая:
сенсорное устройство, выполненное с возможностью формирования набора выходных данных датчиков, которые характеризуют режим полета вертолета;
процессорное устройство, выполненное с возможностью генерировать управляющие сигналы для приводов на основе указанного набора выходных данных датчиков, для управления полетом вертолета в одном режиме полета, выбираемом пилотом из нескольких режимов полета, и для последующего генерирования выходного сигнала корректируемого гироскопа на основании не более чем указанного набора выходных данных датчиков; и
автопилотный дисплей, выполненный с возможностью показывать пилоту информацию по автопилотному режиму полета, при этом отображается для пилота гироскопический курс с магнитной коррекцией на основании указанного выходного сигнала корректируемого гироскопа.
8. Система автопилота по п. 7, в которой автопилотный дисплей представляет собой единый экран, на котором одновременно отображается информация по режиму полета на автопилоте и указанный гироскопический курс с магнитной коррекцией.
9. Система автопилота по п. 7, в которой информация по режиму полета на автопилоте основана по меньшей мере на выходных данных одного датчика из указанного набора выходных данных датчиков.
10. Система автопилота по п. 7, в которой указанное сенсорное устройство содержит гиродатчик угловой скорости рыскания, формирующий выходные данные угловой скорости рыскания, причем указанное процессорное устройство выполнено с возможностью объединять указанные выходные данные угловой скорости рыскания для формирования курса по рысканию.
11. Система автопилота по п. 10, в которой гиродатчик скорости рыскания представляет смещение скорости рыскания, а процессорное устройство выполнено с возможностью периодически обновлять курс по рысканию для компенсации указанного смещения скорости рыскания.
12. Система автопилота по п. 11, в которой указанное сенсорное устройство содержит GPS, генерирующий курс GPS, а процессорное устройство выполнено с возможностью периодически обновлять курс по рысканию в соответствии с указанным курсом GPS.
13. Система автопилота по п. 11, в которой указанное сенсорное устройство содержит блок магнитометров, формирующий сигнал магнитного курса, а процессорное устройство выполнено с возможностью периодически обновлять курс по рысканию в соответствии с указанным сигналом магнитного курса.
14. Система автопилота по п. 7, в которой сенсорное устройство содержит трехосевой гиродатчик угловой скорости и трехосевой акселерометр, формирующие указанный набор выходных данных датчиков, а указанное процессорное устройство выполнено с возможностью формировать данные пространственного положения вертолета, включающие в себя курс по рысканию.
15. Система автопилота по п. 14, в которой процессорное устройство содержит внутренний контур, определяющий указанное пространственное положение вертолета практически моментально на основе указанного набора выходных данных датчиков.
16. Система автопилота по п. 15, в которой указанный внутренний контур определяет пространственное положение вертолета на основе матрицы направляющих косинусов.
17. Система автопилота по п. 14, в которой курс по рысканию подвержен смещению по угловой скорости рыскания, которое обнаруживается с помощью указанного трехосевого гиродатчика угловой скорости, а процессорное устройство выполнено с возможностью по меньшей мере периодически корректировать курс по рысканию для компенсации указанного смещения угловой скорости рыскания и формировать гироскопический курс с магнитной коррекцией.
18. Система автопилота по п. 17, содержащая приемник GPS, формирующий курс GPS, а процессорное устройство выполнено с возможностью периодически обновлять курс по рысканию на основе указанного курса GPS.
19. Система автопилота по п. 7, в которой процессорное устройство содержит внутренний контур, определяющий пространственное положение вертолета практически мгновенно на основе указанного набора выходных данных датчиков.
20. Система автопилота по п. 7, дополнительно содержащая:
приводное устройство, выполненное с возможностью приема управляющих сигналов для приводов для оказания воздействия на полет вертолета в выбранном одном из нескольких различных режимов полета; и
устройство ввода данных, расположенное на ручке циклического управления таким образом, что каждый режим полета выбирается и управление осуществляется с помощью одной руки пилота, находящейся на ручке циклического управления, без снятия руки с ручки циклического управления, при одновременном управлении полетом вертолета с помощью указанной ручки циклического управления.
21. Система автопилота для управления полетом вертолета, содержащая:
процессорное устройство, выполненное с возможностью определения статуса полета вертолета на основании ряда входных данных датчиков для управления вертолетом в одном из нескольких режимов полета, а также с возможностью обеспечить выбор пилотом одного режима полета из поднабора, включающего один или более режимов полета, но менее чем все указанные несколько режимов полета, причем указанный поднабор адаптируется для выбора пилотом на основании текущего статуса полета вертолета.
22. Система автопилота по п. 21, в которой указанный полет вертолета проявляется с помощью кривой мощности и указанный поднабор представляемых пилоту режимов полета основан на текущем статусе полета вертолета относительно указанной кривой мощности.
23. Система автопилота по п. 22, в котором указанные несколько режимов полета включают в себя по меньшей мере режим стабилизации положения, режим висения, режим стабилизации скорости полета, режим стабилизации высоты полета и режим GPS.
24. Система автопилота по п. 23, в котором указанная кривая мощности содержит переднюю часть и в случае, когда текущий статус полета вертолета соответствует указанной передней части кривой мощности, указанный поднабор режимов автопилота включает в себя не более чем режим стабилизации скорости полета, режим стабилизации высоты полета и режим GPS.
25. Система автопилота по п. 23, в котором указанная кривая мощности содержит заднюю часть и в случае, когда текущий статус полета вертолета соответствует указанной задней части кривой мощности, указанный поднабор режимов автопилота включает в себя только режим стабилизации скорости полета.
26. Система автопилота по п. 22, в котором указанные несколько режимов полета включают в себя по меньшей мере режим стабилизации положения, режим висения, режим стабилизации скорости полета, режим стабилизации высоты полета и режим GPS, при этом указанный поднабор режимов автопилота является адаптируемым, чтобы включать в себя не более чем режим висения и режим стабилизации положения, когда указанный текущий статус полета вертолета характеризуется статусом с низкой скоростью полета.
27. Автопилот для использования с вертолетом, содержащим систему несущего винта, включающую в себя циклическое управление для управления полетом вертолета, причем вертолет по меньшей мере генерирует сигнал НИЗКИХ ОБОРОТОВ, указывающий на пороговую низкую угловую скорость вращения несущего винта, содержащий:
сенсорное устройство, формирующее набор выходных данных датчиков, которые характеризуют полет вертолета;
приводное устройство, выполненное с возможностью перемещения для указанного циклического управления в соответствии с одним или несколькими сигналами циклического управления; и
управляющее устройство, выполненное с возможностью принимать сигнал активации, по меньшей мере частично основанный на указанном сигнале НИЗКИХ ОБОРОТОВ и указанных выходных данных датчиков, и в ответ на сигнал активации автоматически включать режим аварийного снижения для генерирования указанных сигналов циклического управления в соответствии с указанными выходными данными датчиков для выполнения указанного циклического управления без управляющих входных данных от пилота, по меньшей мере на начальном участке снижения, по меньшей мере для изменения угла тангажа вертолета таким образом, чтобы обеспечить начальную стабилизацию горизонтальной скорости вертолета, которая находится в предварительно заданном диапазоне скорости, независимо от конкретной горизонтальной скорости в момент, когда появился указанный сигнал активации.
28. Автопилот по п. 27, в котором управляющее устройство выполнено с возможностью увеличивать угол тангажа вертолета для снижения горизонтальной скорости, если указанная конкретная горизонтальная скорость превышает указанный предварительно заданный диапазон в момент указанного сигнала активации.
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2004 |
|
RU2282562C1 |
| Самодвижущаяся зимняя повозка | 1924 |
|
SU8813A1 |
| US 7558653 B2, 07.07.2009 | |||
| US 5836546 A1, 17.11.1998 | |||
| US 4527242 A1, 02.07.1985. | |||

