Область техники
[0001] Настоящее изобретение относится к способу и устройству для распределения движущей силы в транспортном средстве с приводом на передние и задние колеса.
Описание предшествующего уровня техники
[0002] Патентный документ 1 раскрывает транспортное средство с приводом на передние и задние колеса, в котором движущая сила для передних колес, которые являются основными ведущими колесами, распределяется через муфту с электронным управлением на задние колеса, которые являются вспомогательными ведущими колесами, причем движущая сила, распределяемая к задним колесам, которые являются вспомогательными ведущими колесами, увеличивается в случае недостаточной поворачиваемости транспортного средства при повороте.
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1: Опубликованная заявка на патент Японии № 2010-23734
Раскрытие изобретения
Проблемы, решаемые изобретением
[0004] Однако в технологии, описанной в Патентном документе 1, когда разность скоростей вращения между передними колесами, которые являются основными ведущими колесами, и задними колесами, которые являются вспомогательными ведущими колесами, мала и движущая сила, распределяемая на задние колеса, которые являются вспомогательными ведущими колесами, увеличивается, чрезмерная дифференциальная ограничивающая сила может создавать обратный момент в направлении поворота, что может еще больше вызвать недостаточную поворачиваемость транспортного средства.
Настоящее изобретение было разработано с учетом проблем, описанных выше, причем настоящее изобретение обеспечивает способ и устройство для распределения движущей силы в транспортном средстве с приводом на передние и задние колеса, в котором любое развитие недостаточной поворачиваемости транспортного средства минимизируется.
Средства, используемые для решения вышеперечисленных проблем
[0005] С помощью способа и устройства для распределения движущей силы в транспортном средстве с приводом на передние и задние колеса согласно настоящему изобретению, когда разность скоростей вращения между скоростью вращения основных ведущих колес и скоростью вращения вспомогательных ведущих колес была определена как меньшая, чем предварительно определенная разность скоростей вращения, текущее распределение движущей силы на сторону вспомогательных ведущих колес в устройстве распределения движущей силы уменьшается на вторую предварительно определенную величину.
Результат изобретения
[0006] Следовательно, в настоящем изобретении любое усиление недостаточной поворачиваемости транспортного средства минимизируется.
Краткое описание чертежей
[0007] Фиг.1 - структурная схема устройства распределения движущей силы для транспортного средства с приводом на передние и задние колеса, в котором применяется настоящее изобретение;
Фиг.2 - блок-схема управления в блоке управления C/U первого варианта осуществления;
Фиг.3 - блок-схема последовательности операций процесса управления в блоке управления C/U первого варианта осуществления;
Фиг.4 - характеристический график предварительно определенной разности ΔNo скоростей вращения для первого варианта осуществления;
Фиг.5 - блок-схема последовательности операций процесса управления в блоке управления C/U второго варианта осуществления; и
Фиг.6 - блок-схема последовательности операций процесса управления в блоке управления C/U третьего варианта осуществления.
Пояснение
[0008] 1: Двигатель (источник движущей силы)
6: Левое переднее колесо (основное ведущее колесо)
7: Правое переднее колесо (основное ведущее колесо)
16: Муфта с электронным управлением (устройство распределения движущей силы)
19: Левое заднее колесо (вспомогательное ведущее колесо)
20: Правое заднее колесо (вспомогательное ведущее колесо)
40: Блок определения поворота
41: Устройство определения руления
42: Блок определения разности скоростей вращения
43: Блок определения распределения движущей силы
100: Транспортное средство с приводом на передние и задние колеса
C/U: Блок управления (устройство управления распределением движущей силы)
ΔN: Разность скоростей вращения между основными ведущими колесами и вспомогательными ведущими колесами.
ΔNo: Предварительно определенная разность скоростей вращения
ΔT1: Первая предварительно определенная величина
ΔT2: Вторая предварительно определенная величина
Предпочтительные варианты осуществления изобретения
[0009] [Первый вариант осуществления]
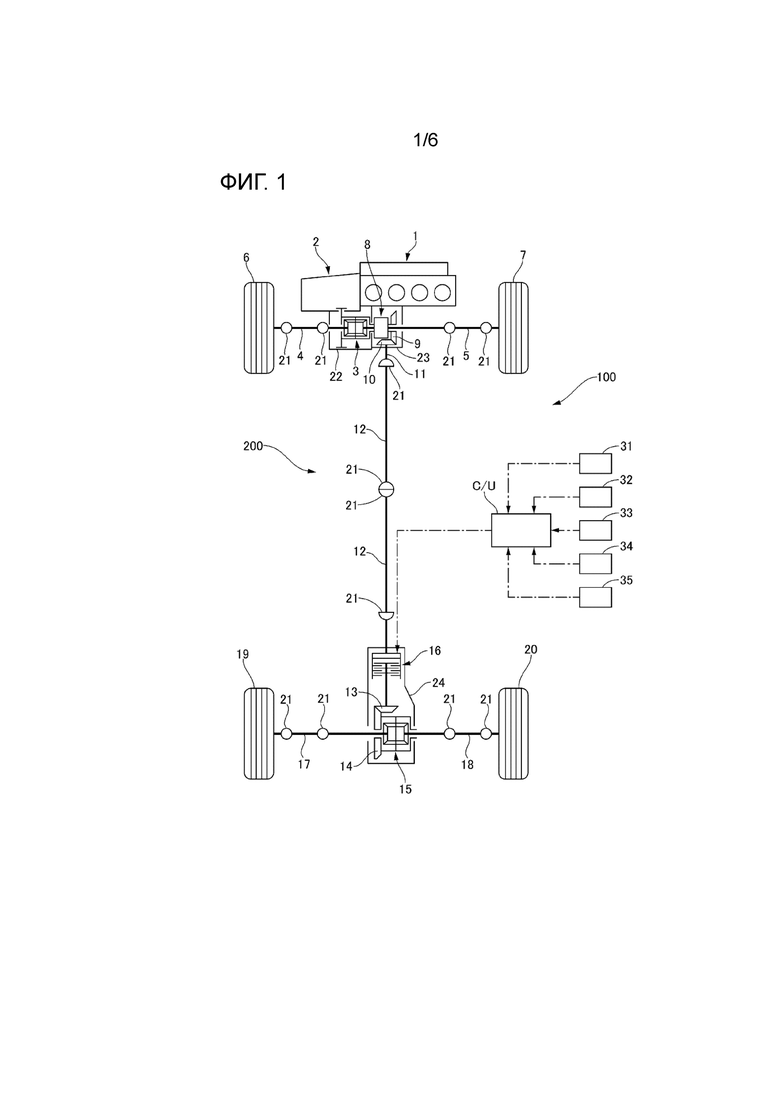
На фиг.1 представлена структурная схема устройства для распределения движущей силы в транспортном средстве с приводом на передние и задние колеса, в котором применяется настоящее изобретение.
[0010] Конфигурация устройства 200 передачи движущей силы будет описана на основе фиг. 1.
[0011] Система привода на передние колеса устройства 200 передачи движущей силы транспортного средства 100 с приводом на передние и задние колеса содержит установленный поперечно двигатель 1 (источник движущей силы), автоматическую коробку 2 передач, передний дифференциал 3, вал 4 привода левого переднего колеса, вал 5 привода правого переднего колеса, левое переднее колесо 6 (основное ведущее колесо) и правое переднее колесо 7 (основное ведущее колесо), как показано на фиг.1. В частности, движущая сила, формируемая поперечно установленным двигателем 1, передается на валы 4, 5 привода левого и правого передних колес через автоматическую коробку 2 передач и передний дифференциал 3, а левое и правое передние колеса 6, 7 постоянно приводятся в действие, пока дифференциал включен. В качестве источника движущей силы может использоваться электродвигатель.
[0012] Система привода на задние колеса устройства 200 передачи движущей силы транспортного средства с приводом на передние и задние колеса содержит кулачковую муфту 8, коническую шестерню 9, выходную шестерню 10, выходной вал 11 задних колес и карданный вал 12, как показано на фиг.1. Эта система также включает в себя муфту 16 с электронным управлением (устройство распределения движущей силы), ведущую шестерню 13, ведомую шестерню 14, задний дифференциал 15, вал 17 привода левого заднего колеса, вал 18 привода правого заднего колеса, левое заднее колесо 19 (вспомогательное ведущее колесо) и правое заднее колесо 20 (вспомогательное ведущее колесо). В частности, это представляет собой систему привода, с помощью которой можно выбрать режим привода на два колеса, в котором кулачковая муфта 8 и муфта 16 с электронным управлением отключены. Из-за отключения кулачковой муфты 8 и муфты 16 с электронным управлением вращение в системе привода после кулачковой муфты 8 (вращение карданного вала 12 и т.д.) прекращается, в результате чего потери на трение, потери при перемешивании масла и т.д. сведены к минимуму, а топливная эффективность улучшена. Цифрами 21 на фиг. 1 обозначены универсальные шарниры.
[0013] Кулачковая муфта 8 предусмотрена в положении, в котором приводит в действие ветви от левого и правого передних колес 6, 7 к левому и правому задним колесам 19, 20, и представляет собой зацепляющуюся муфту, которая при расцеплении муфты отключает систему передачи движущей силы на левое и правое задние колеса 19, 20 от системы передачи движущей силы на левое и правое передние колеса 6, 7. Зацепляющий элемент на входной стороне кулачковой муфты 8 соединен с корпусом дифференциала переднего дифференциала 3, а зацепляющий элемент на выходной стороне кулачковой муфты 8 связан с конической шестерней 9. Кулачковая муфта 8, коническая шестерня 9, выходная шестерня 10 и часть выходного вала 11 задних колес встроены в раздаточную коробку 23, закрепленную в положении рядом с корпусом 22 переднего дифференциала. В кулачковой муфте 8, например, один из пары зацепляющих элементов (не показан) является неподвижным элементом, другой - подвижным элементом, между неподвижным элементом и подвижным элементом предусмотрена пружина, которая поджимает в направлении зацепления, и на внешней периферии подвижного элемента сформирована резьбовая канавка, подходящая для вставки штифта соленоида. Когда кулачковая муфта 8 расцепляется, штифт соленоида выступает и входит в резьбовую канавку, после чего подвижный элемент совершает ход в направлении расцепления при вращении, и зацепление расцепляется, когда величина хода превышает предварительно определенную величину. Когда кулачковая муфта 8 находится в зацеплении, штифт соленоида не выходит из резьбовой канавки, после чего подвижный элемент совершает ход в направлении зацепления к неподвижному элементу из-за прижимающей силы пружины, и зубчатые части двух элементов зацепляются вместе.
[0014] Муфта 16 с электронным управлением представляет собой устройство распределения движущей силы, которое предусмотрено в положении после положения разветвления привода, где предусмотрена кулачковая муфта 8, и которое распределяет часть движущей силы от поперечно установленного двигателя 1 к левому и правому задним колесам 19, 20 в соответствии с возможностью сцепления муфты. Диск фрикционной муфты входной стороны муфты 16 с электронным управлением соединен с карданным валом 12, а диск фрикционной муфты выходной стороны соединен с ведущей шестерней 13. Муфта 16 с электронным управлением встроена в корпус 24 заднего дифференциала. Муфта 16 с электронным управлением имеет, например (не показано), многодисковую фрикционную муфту с несколькими дисками на входной и выходной сторонах, расположенными поочередно, неподвижный кулачковый поршень и подвижный кулачковый поршень, имеющие противоположные кулачковые поверхности, и кулачковый элемент вставлен между противоположными кулачковыми поверхностями. Когда муфта 16 с электронным управлением находится в зацеплении, подвижный кулачковый поршень приводится во вращение электродвигателем, после чего подвижный кулачковый поршень совершает ход в направлении включения муфты в соответствии с углом поворота из-за действия кулачка, увеличивая зазор между поршнями, и сила фрикционного зацепления многодисковой фрикционной муфты увеличивается. Когда муфта 16 с электронным управлением расцеплена, подвижный кулачковый поршень приводится во вращение электродвигателем в направлении, противоположном направлению зацепления, после чего подвижный кулачковый поршень совершает ход в направлении расцепления муфты в соответствии с углом поворота из-за действия кулачка, уменьшая зазор между поршнями, и сила фрикционного зацепления многодисковой фрикционной муфты уменьшается.
[0015] Блок управления C/U (устройство управления распределением движущей силы), который управляет силой зацепления муфты 16 с электронным управлением, представляет собой «микрокомпьютер», который имеет конфигурацию, включающую CPU, ROM, RAM, интерфейс ввода/вывода и т.д., и который обрабатывает сигналы в соответствии с программами, заранее сохраненными в ROM, с использованием функции временного хранения RAM.
[0016] Например, блок управления C/U выполняет такие задачи, как управление движущей силой, которая может передаваться посредством муфты 16 с электронным управлением, посредством управления значением команды для электрического тока, подаваемого на электродвигатель, предоставляемого для муфты 16 с электронным управлением; то есть блок управления C/U выполняет управление распределением движущей силы, относящееся к приводу на передние и задние колеса, через устройство 200 передачи движущей силы. Следовательно, чтобы осуществлять управление распределением движущей силы, устройство 200 передачи движущей силы снабжено датчиком 31 скорости колеса транспортного средства, который определяет фактические скорости вращения левого и правого передних колес 6, 7, а также левого и правого задних колес 19, 20, датчиком 32 угла поворота, который определяет угол поворота для рулевого колеса (не показано), датчиком 33 положения акселератора, который определяет положение акселератора, соответствующее величине нажатия педали акселератора (не показано), датчиком 34 скорости рыскания, который определяет фактическое поперечное направление G (степень ускорения) транспортного средства 100 с приводом на передние и задние колеса, датчик 35 продольного G, который определяет фактическое продольное направление G (степень ускорения) транспортного средства 100 с приводом на передние и задние колеса, и другими различными датчиками. Сигналы, представляющие скорости вращения колес транспортного средства, то есть левого и правого передних колес 6, 7 и левого и правого задних колес 19, 20, сигнал, представляющий угол поворота для рулевого колеса, сигнал, представляющий положение акселератора, сигнал, представляющий поперечное G транспортного средства, сигнал, представляющий продольное G транспортного средства, и т.д., поступают от соответствующих датчиков в блок управления C/U.
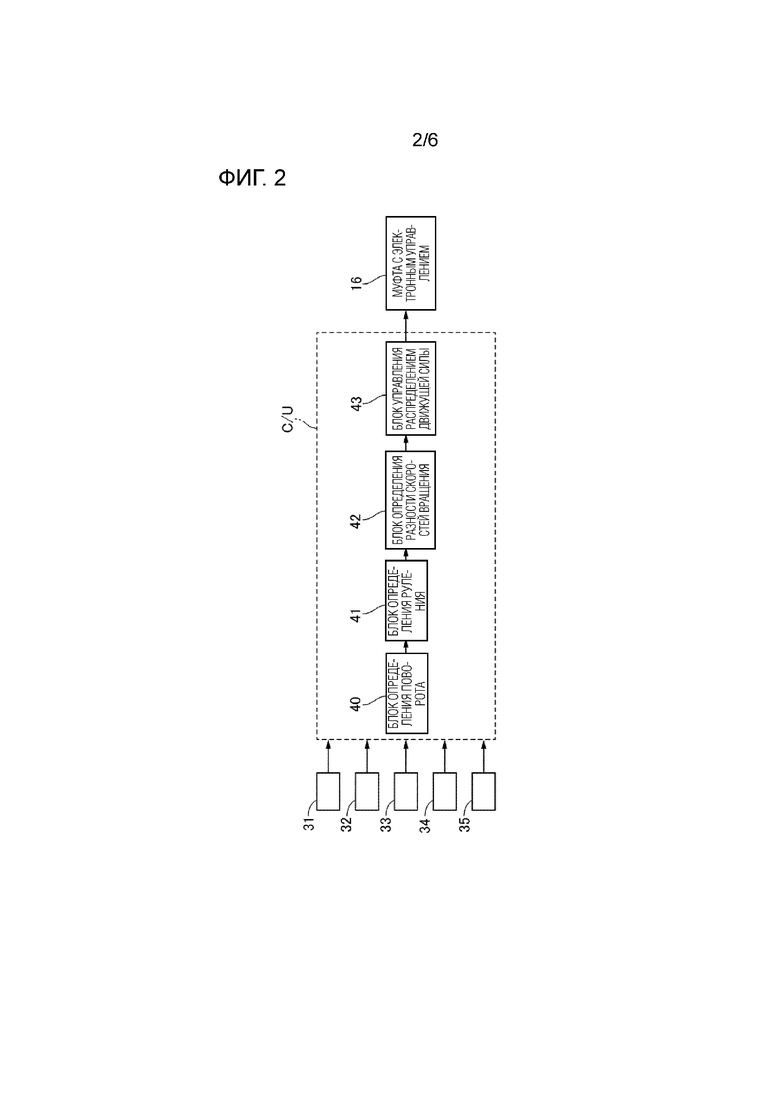
Фиг.2 - блок-схема управления в блоке управления C/U первого варианта осуществления. Блок управления C/U снабжен блоком 40 определения поворота, блоком 41 определения руления, блоком 42 определения разности скоростей вращения и частью 43 управления распределением движущей силы.
[0018] Блок 40 определения поворота определяет движение с поворотом транспортного средства 100 с приводом на передние и задние колеса. Например, совершает ли транспортное средство 100 с приводом на передние и задние колеса движение с поворотом, определяется из предварительно установленного соотношения на основе скоростей вращения колес транспортного средства, то есть левого и правого передних колес 6, 7 и левого и правого задних колеса 19, 20, обнаруженных датчиком 31 скорости колеса транспортного средства, угла поворота для рулевого колеса, обнаруженного датчиком 32 угла поворота, поперечного направления G транспортного средства 100 с приводом на передние и задние колеса, обнаруженного датчиком 34 скорости рыскания и др. Проще говоря, движение с поворотом транспортного средства 100 с приводом на передние и задние колеса может быть определено в том случае, если угол поворота для рулевого колеса, обнаруженный датчиком 32 угла поворота, и угол выходного сигнала рулевого управления с усилителем и т.д., соответствующие углу поворота по отношению к прямому направлению, равны или больше предварительно определенного значения. Движение с поворотом транспортного средства 100 с приводом на передние и задние колеса также может быть определено в том случае, если поперечное направление G транспортного средства 100 с приводом на передние и задние колеса, обнаруженное датчиком 34 скорости рыскания, равно или больше предварительно определенного значения.
[0019] Когда движение с поворотом транспортного средства 100 с приводом на передние и задние колеса определяется блоком 40 определения поворота, блок 41 определения руления определяет нейтральное руление, избыточную или недостаточную поворачиваемость транспортного средства 100 с приводом на передние и задние колеса. Например, из предварительно установленного соотношения целевая скорость рыскания транспортного средства 100 с приводом на передние и задние колеса вычисляется на основе угла поворота для рулевого колеса, обнаруженного датчиком 32 угла поворота, поперечного направления G транспортного средства 100 с приводом на передние и задние колеса, обнаруженного датчиком 34 скорости рыскания, скорости V транспортного средства, вычисленной из скоростей вращения колес транспортного средства, обнаруженных датчиком 31 скорости колеса транспортного средства, и т.д. Рассчитывается отклонение между целевой скоростью рыскания и фактической скоростью рыскания, обнаруженной датчиком 34 скорости рыскания, и в соответствии с этим отклонением определяется нейтральное руление, избыточная или недостаточная поворачиваемость транспортного средства 100 с приводом на передние и задние колеса. Транспортное средство 100 с приводом на передние и задние колеса определяется как находящееся в нейтральном режиме руления, когда отклонение между целевой скоростью рыскания транспортного средства 100 с приводом на передние и задние колеса, вычисленной, как описано выше, и фактической скоростью рыскания, обнаруженной датчиком 34 скорости рыскания, равно нулю или находится в пределах погрешности.
[0020] Когда недостаточная поворачиваемость определяется блоком 41 определения руления, блок 42 определения разности скоростей вращения вычисляет фактическую разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 и сравнивает эту разность ΔN с предварительно определенной разностью ΔNo скоростей вращения, чтобы определить, меньше ли фактическая разность ΔN скоростей вращения, чем предварительно определенная разность ΔNo скоростей вращения.
[0021] Когда кулачковая муфта 8 находится в зацепленном состоянии, часть 43 управления распределением движущей силы отправляет командный сигнал на электродвигатель муфты 16 с электронным управлением и выполняет управление распределением движущей силы, относящееся к приводу на передние и задние колеса, на основе результатов определения блока 40 определения поворота, блока 41 определения руления и блока 42 определения разности скоростей вращения. В частности, распределение движущей силы для движения по прямой выполняется, когда транспортное средство 100 с приводом на передние и задние колеса движется по прямой. Текущее распределение движущей силы продолжается, если транспортное средство 100 с приводом на передние и задние колеса находится в нейтральном состоянии руления при повороте. Если транспортное средство 100 с приводом на передние и задние колеса испытывает избыточную поворачиваемость при повороте, распределение движущей силы на левое и правое задние колеса 19, 20 уменьшается на предварительно определенную величину ΔT, соответствующую целевой скорости рыскания и фактической скорости рыскания, обнаруженной датчиком 34 скорости рыскания. Кроме того, когда транспортное средство 100 с приводом на передние и задние колеса испытывает недостаточную поворачиваемость при повороте и фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 не меньше предварительно определенной разности ΔNo скоростей вращения, распределение движущей силы на левое и правое задние колеса 19, 20 увеличивается на первую предварительно определенную величину ΔT1, соответствующую отклонению между целевой скоростью рыскания и фактической скоростью рыскания, обнаруженной датчиком 34 скорости рыскания. И наоборот, когда фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 меньше, чем предварительно определенная разность ΔNo скоростей вращения, первая предварительно определенная величина ΔT1 увеличения, которая соответствует отклонению между целевой скоростью рыскания и фактической скоростью рыскания, обнаруженной датчиком 34 скорости рыскания, сводится к минимуму, а распределение движущей силы на левое и правое задние колеса 19, 20 уменьшается на вторую предварительно определенную величину ΔT2, которая соответствует отклонению между фактической разностью ΔN скоростей вращения и предварительно определенной разностью ΔNo скоростей вращения. Например, поскольку отклонение между фактической разностью ΔN скоростей вращения и предварительно определенной разностью ΔNo скоростей вращения увеличивается, когда фактическая разность ΔN скоростей вращения меньше, чем предварительно определенная разность ΔNo скоростей вращения, вторая предварительно определенная величина ΔT2 увеличивается или уменьшается в соизмеримо большей степени.
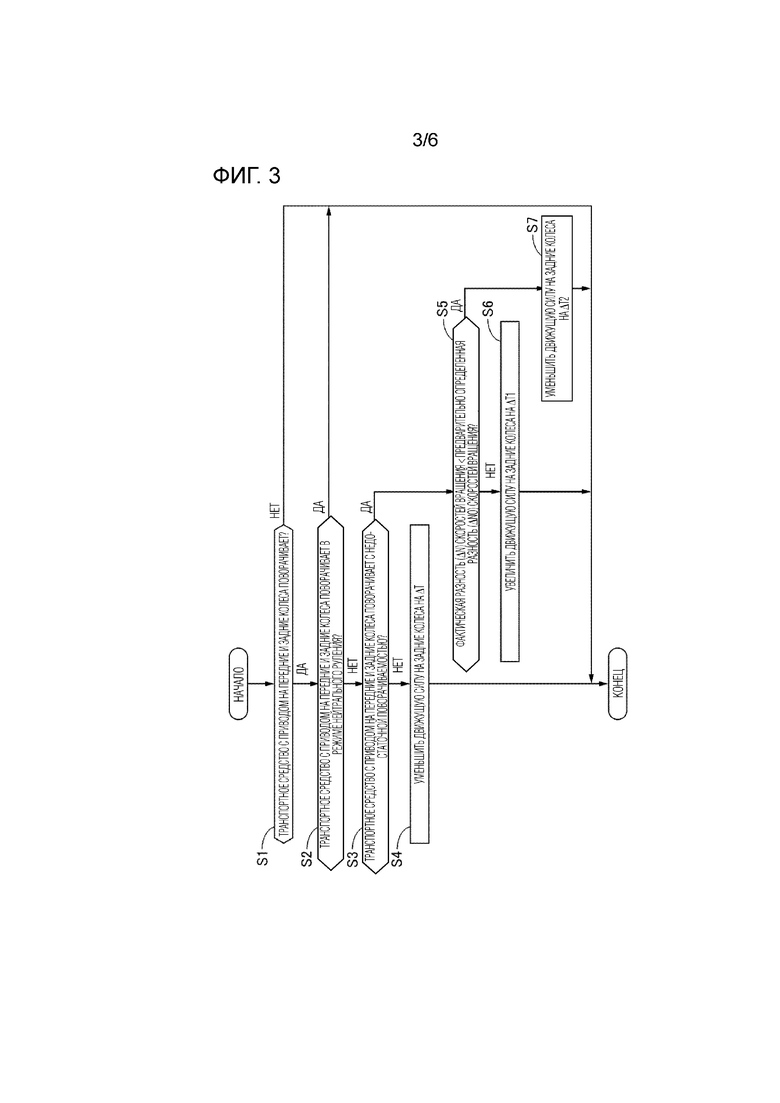
[0022] Фиг.3 - блок-схема последовательности операций процесса управления в блоке управления C/U первого варианта осуществления. Эта блок-схема многократно выполняется в заранее определенном вычислительном цикле.
[0023] На этапе S1 определяется, поворачивает ли транспортное средство 100 с приводом на передние и задние колеса. Если транспортное средство поворачивает, процесс переходит к этапу S2, и если транспортное средство не поворачивает, то есть движется по прямой, это управление завершается, и выполняется управление распределением движущей силы для прямого движения. При управлении распределением движущей силы для прямого движения, в частности, распределение движущей силы левого и правого передних колес, а также левого и правого задних колес составляет 50:50, когда транспортное средство трогается с места, и поскольку скорость транспортного средства V увеличивается, распределение движущей силы левого и правого передних колес соразмерно дополнительно увеличивается. На этапе S2 определяется, поворачивает ли транспортное средство 100 с приводом на передние и задние колеса в нейтральном режиме руления. Когда транспортное средство не поворачивает в нейтральном режиме руления, процесс переходит к этапу S3, и когда транспортное средство поворачивает в нейтральном режиме руления, управление завершается, и текущее управление распределением движущей силы продолжает выполняться.
[0024] На этапе S3 определяется, поворачивает ли транспортное средство 100 с приводом на передние и задние колеса с недостаточной поворачиваемостью. Когда транспортное средство не поворачивает с недостаточной поворачиваемостью, то есть когда транспортное средство поворачивает с избыточной поворачиваемостью, процесс переходит к этапу S4, а когда транспортное средство поворачивает с недостаточной поворачиваемостью, процесс переходит к этапу S5. На этапе S4, поскольку транспортное средство 100 с приводом на передние и задние колеса поворачивает с избыточной поворачиваемостью, распределение движущей силы на левое и правое задние колеса 19, 20 уменьшается на предварительно определенную величину ΔT, соответствующую отклонению между целевой скоростью рыскания и фактической скоростью рыскания, определенной датчиком 34 скорости рыскания.
[0025] На этапе S5 выполняется определение того, является ли фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 меньшей, чем предварительно определенная разность ΔNo скоростей вращения. Когда фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 не меньше предварительно определенной разности ΔNo скоростей вращения, процесс переходит к этапу S6, и когда фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 меньше, чем предварительно определенная разность ΔNo скоростей вращения, процесс переходит к этапу S7. Предварительно определенная разность ΔNo скоростей вращения обеспечивает гистерезис между случаями на этапе 7 (описанном ниже), в которых распределение движущей силы на левое и правое задние колеса 19, 20 было уменьшено, и случаями, в которых распределение движущей силы на левое и правое задние колеса 19, 20 не было уменьшено, и предотвращает рыскание.
[0026] На этапе S6, распределение движущей силы на левое и правое задние колеса 19, 20 увеличивается по отношению к распределению движущей силы для прямого движения, которое является текущим распределением движущей силы, на первую предварительно определенную величину ΔT1, соответствующую отклонению между целевой скоростью рыскания и фактической скоростью рыскания, обнаруженной датчиком 34 скорости рыскания. На этапе S7 распределение движущей силы на левое и правое задние колеса 19, 20 уменьшается по отношению к распределению движущей силы для прямого движения, которое является текущим распределением движущей силы, на вторую предварительно определенную величину ΔT2, соответствующую отклонению между фактической разностью ΔN скоростей вращения и предварительно определенной разностью ΔNo скоростей вращения. Например, при большем отклонении между фактической разностью ΔN скоростей вращения и предварительно определенной разностью ΔNo скоростей вращения, когда фактическая разность ΔN скоростей вращения меньше, чем предварительно определенная разность ΔNo скоростей вращения, распределение движущей силы на левое и правое задние колеса 19, 20 уменьшается на соразмерно большую вторую предварительно определенную величину ΔT2. Из-за этой конфигурации, когда транспортное средство 100 с приводом на передние и задние колеса испытывает недостаточную поворачиваемость при повороте и фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 меньше предварительно определенной разности ΔNo скоростей вращения, распределение движущей силы на левое и правое задние колеса 19, 20 уменьшается на вторую предварительно определенную величину ΔT2, соответствующую отклонению между фактической разностью ΔN скоростей вращения и предварительно определенной разностью ΔNo скоростей вращения, а также любое развитие недостаточной поворачиваемости транспортного средства 100 с приводом на передние и задние колеса, следовательно, может быть минимизировано.
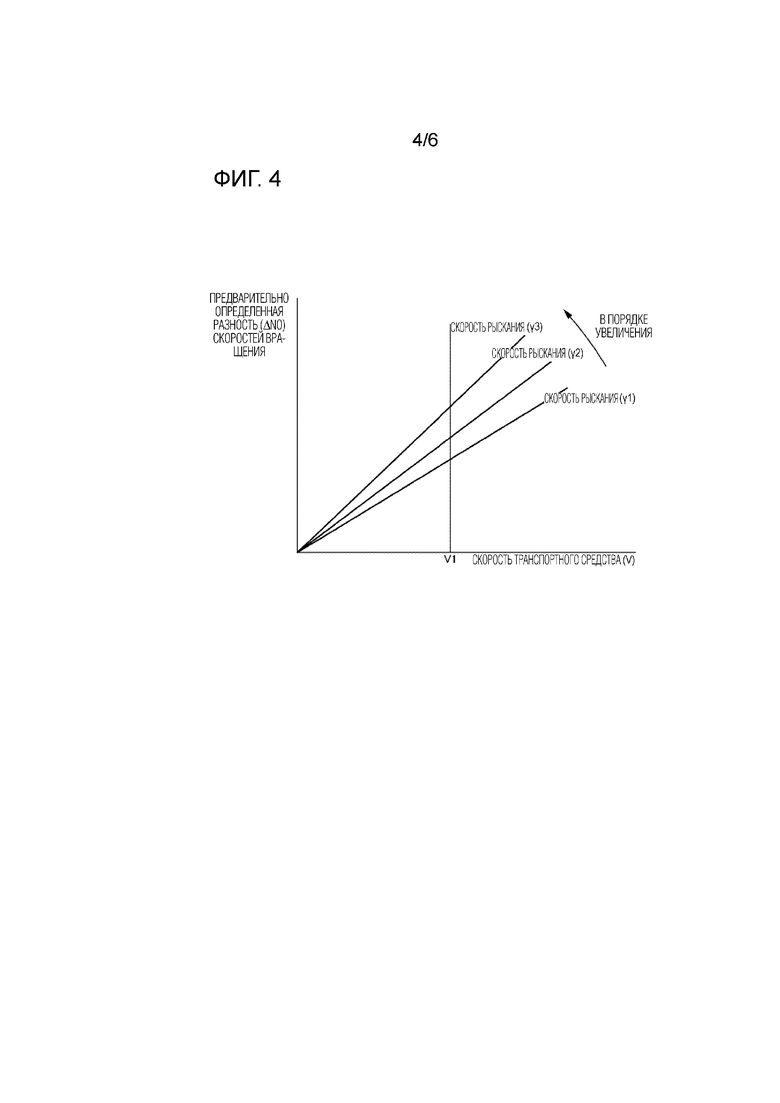
[0027] Фиг.4 - это характеристический график предварительно определенной разности ΔNo скоростей вращения для первого варианта осуществления.
[0028] Горизонтальная ось представляет скорость V транспортного средства, а вертикальная ось представляет предварительно определенную разность ΔNo скоростей вращения. Характеристики трех типов предварительно определенных разностей ΔNo скоростей вращения показаны в соответствии с величиной скорости γ рыскания (γ1 < γ2 < γ3).
[0029] Фиксируя скорость γ рыскания и глядя на характеристики скорости γ1 рыскания, предварительно определенная разность ΔNo скоростей вращения устанавливается соразмерно большей по мере увеличения скорости V транспортного средства. Фиксируя скорость V транспортного средства и глядя на характеристики скорости V1 транспортного средства, предварительно определенная разность ΔNo скоростей вращения устанавливается соразмерно большей по мере увеличения скорости γ рыскания (γ1 < γ2 < γ3). В частности, предварительно определенная разность ΔNo скоростей вращения может быть установлена соразмерно большей, когда увеличивается либо скорость V транспортного средства, либо скорость γ рыскания, или может быть установлена соразмерно большей, когда увеличивается как скорость V транспортного средства, так и скорость γ рыскания. Таким образом, можно дополнительно минимизировать любое развитие недостаточной поворачиваемости транспортного средства 100 с приводом на передние и задние колеса, поскольку предварительно определенная разность ΔNo скоростей вращения устанавливается в соответствии с характеристиками поворота транспортного средства 100 с приводом на передние и задние колеса. Как описано выше, предварительно определенная разность ΔNo скоростей вращения обеспечивает гистерезис и предотвращает рыскание. Кроме того, угол поворота для рулевого колеса, обнаруженный датчиком 32 угла поворота, может использоваться вместо скорости γ рыскания.
[0030] Как описано выше, первый вариант осуществления имеет перечисленные ниже эффекты. (1) Когда транспортное средство 100 с приводом на передние и задние колеса испытывает недостаточную поворачиваемость при повороте и фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 меньше предварительно определенной разности ΔNo скоростей вращения, распределение движущей силы на левое и правое задние колеса 19, 20 уменьшается на вторую предварительно определенную величину ΔT2, соответствующую отклонению между фактической разностью ΔN скоростей вращения и предварительно определенной разностью ΔNo скоростей вращения. Следовательно, любое усиление недостаточной поворачиваемости транспортного средства 100 с приводом на передние и задние колеса может быть минимизировано.
[0031] (2) Предварительно определенная разность ΔNo скоростей вращения устанавливается соразмерно большей по мере увеличения скорости V транспортного средства и/или скорости γ рыскания. Следовательно, любое усиление недостаточной поворачиваемости транспортного средства 100 с приводом на передние и задние колеса может быть дополнительно минимизировано, поскольку предварительно определенная разность ΔNo скоростей вращения устанавливается в соответствии с характеристиками поворота транспортного средства 100 с приводом на передние и задние колеса.
[0032] [Второй вариант осуществления]
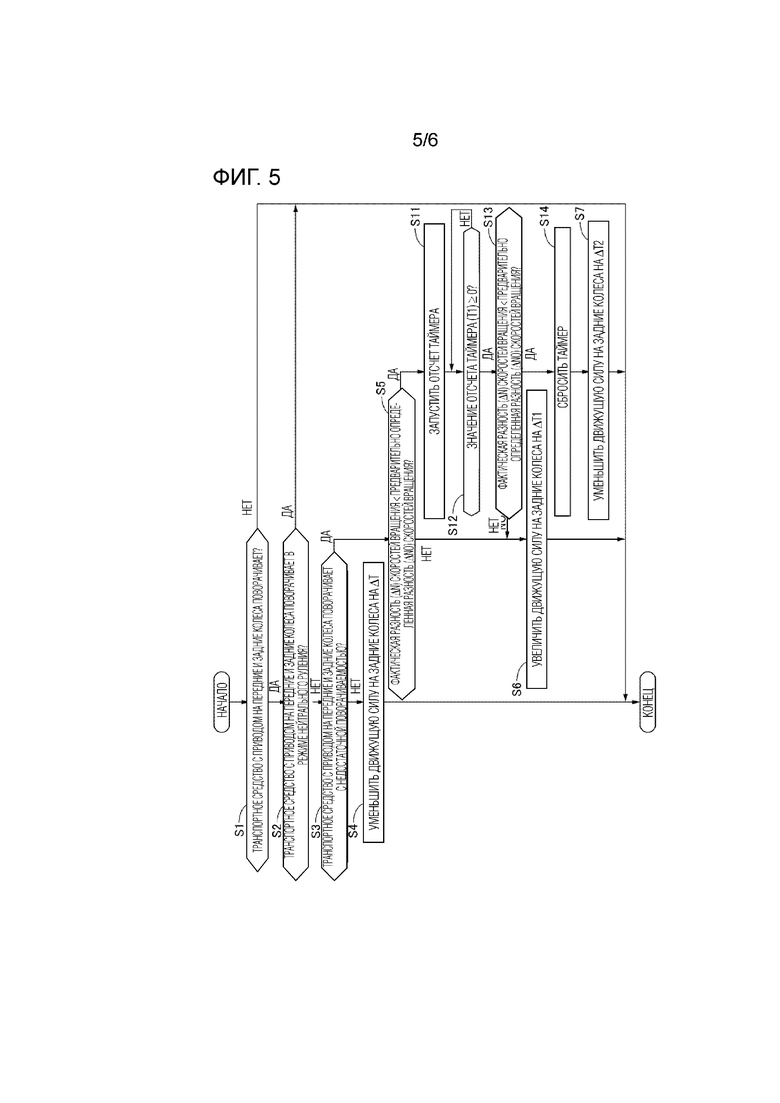
На фиг.5 представлена блок-схема последовательности операций процесса управления в блоке управления C/U второго варианта осуществления. Эта блок-схема многократно выполняется в предварительно определенном вычислительном цикле.
[0033] Базовая конфигурация второго варианта осуществления такая же, как у первого варианта осуществления, и поэтому описаны только разделы, отличные от первого варианта осуществления. В частности, этапы с S11 по S14 добавляются между этапами S5 и S7.
[0034] На этапе S11 отсчет таймера запускается после того, как фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 определена как меньшая, чем предварительно определенная разность ΔNo скоростей вращения. На этапе S12 определяется, является ли значение t1 отсчета таймера равным или большим, чем предварительно определенное время t0. Когда значение t1 отсчета таймера является равным или большим, чем предварительно определенное время t0, процесс переходит к этапу S13, а когда значение t1 отсчета таймера не является равным или большим, чем предварительно определенное время t0, процесс возвращается к этапу S12. На этапе S13 снова выполняется определение, является ли фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 меньшей, чем предварительно определенная разность ΔNo скоростей вращения. Когда фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 не меньше предварительно определенной разности ΔN скоростей вращения, процесс переходит к этапу S6, и когда фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 меньше предварительно определенной разности ΔN скоростей вращения, процесс переходит к этапу S14. На этапе S14 таймер сбрасывается, и процесс переходит к этапу S7. В частности, когда фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 определена как меньшая, чем предварительно определенная разность ΔNo скоростей вращения, распределение движущей силы на левое и правое задние колеса 19, 20 не сразу уменьшается на вторую предварительно определенную величину ΔT2, соответствующую отклонению между фактической разностью ΔN скоростей вращения и предварительно определенной разностью ΔNo скоростей вращения, но текущее распределение движущей силы сохраняется в течение предварительно определенного времени t0, и по истечении предварительно определенного времени t0 снова выполняется определение того, действительно ли фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 меньше, чем предварительно определенная разность ΔNo скоростей вращения. Таким образом можно свести к минимуму ошибочные оценки из-за нарушений состояния дорожного покрытия и т.д.
[0035] Как описано выше, второй вариант осуществления имеет следующий эффект в дополнение к эффектам первого варианта осуществления. (1) Когда фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 определена как меньшая, чем предварительно определенная разность ΔNo скоростей вращения, распределение движущей силы на левое и правое задние колеса 19, 20 не сразу уменьшается на вторую предварительно определенную величину ΔT2, соответствующую отклонению между фактической разностью ΔN скоростей вращения и предварительно определенной разностью ΔNo скоростей вращения, но текущее распределение движущей силы сохраняется в течение предварительно определенного времени t0, и после того, как предварительно определенное время t0 истекло, снова выполняется определение того, является ли фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 меньшей, чем предварительно определенная разность ΔNo скоростей вращения. Таким образом, можно свести к минимуму ошибочные оценки из-за нарушений состояния дорожного покрытия и т.д.
[0036] [Третий вариант осуществления]
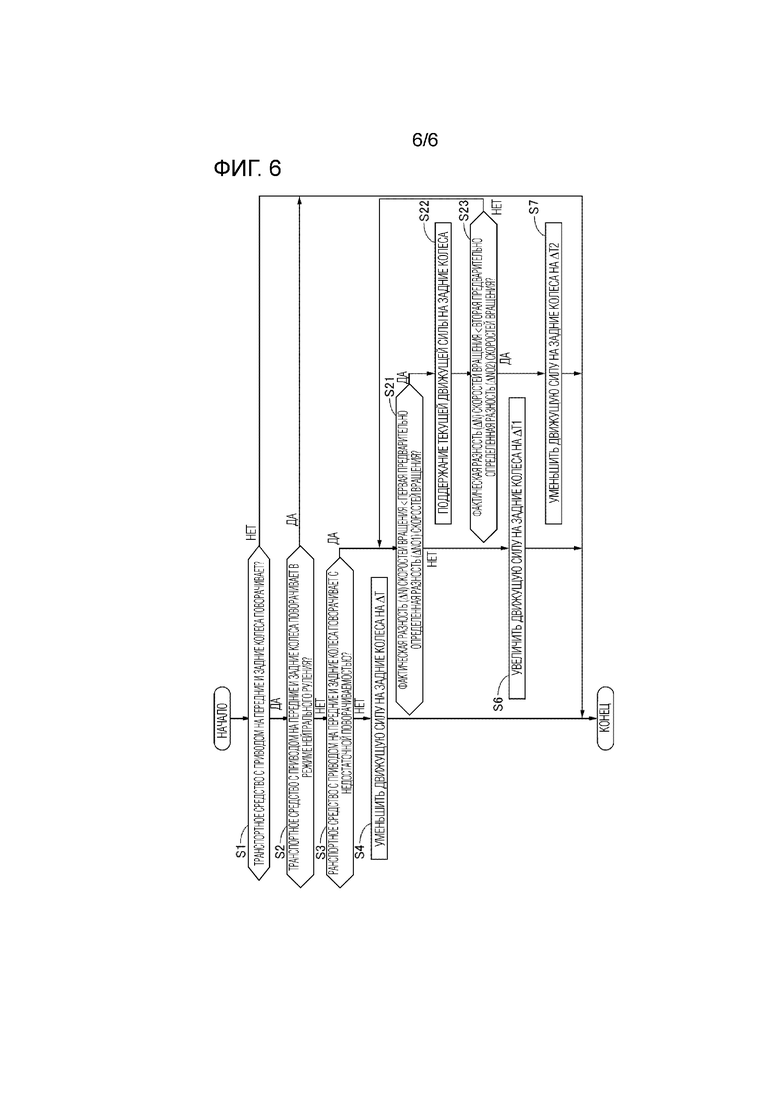
Фиг.6 - блок-схема последовательности операций процесса управления в блоке управления C/U третьего варианта осуществления. Эта блок-схема многократно выполняется в заранее определенном вычислительном цикле.
[0037] Базовая конфигурация третьего варианта осуществления такая же, как у первого варианта осуществления, и поэтому описаны только разделы, отличные от первого варианта осуществления. В частности, предварительно определенная разность ΔNo скоростей вращения устанавливается как первая предварительно определенная разность ΔNo1 скоростей вращения и вторая предварительно определенная разность ΔNo2 скоростей вращения меньшая, чем первая предварительно определенная разность ΔNo1 скоростей вращения.
[0038] На этапе S21 выполняется определение того, является ли фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 меньшей, чем первая предварительно определенная разность ΔNo1 скоростей вращения. Когда фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 не меньше, чем первая предварительно определенная разность ΔNo1 скоростей вращения, процесс переходит к этапу S6, и когда фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 меньше, чем первая предварительно определенная разность ΔNo1 скоростей вращения, процесс переходит к этапу S22. На этапе S22 поддерживается ведущая сила на задние колеса, передаваемая текущим распределением движущей силы. На этапе S23 определяется, меньше ли фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20, чем вторая предварительно определенная разность ΔNo2 скоростей вращения. Когда фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 не меньше второй предварительно определенной разности ΔNo2 скоростей вращения, процесс возвращается к этапу S21, и когда фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 меньше, чем вторая предварительно определенная разность ΔNo2 скоростей вращения, процесс переходит к этапу S7. В частности, когда фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20 определена как меньшая, чем первая предварительно определенная разность ΔNo1 скоростей вращения, распределение движущей силы на левое и правое задние колеса 19, 20 не сразу уменьшается на вторую предварительно определенную величину ΔT2, соответствующую отклонению между фактической разностью ΔN скоростей вращения и предварительно определенной разностью ΔNo1 скоростей вращения, но определяется, меньше ли фактическая разность ΔN скоростей вращения между средней скоростью вращения левого и правого передних колес 6, 7 и средней скоростью вращения левого и правого задних колес 19, 20, чем вторая предварительно определенная разность ΔNo2 скоростей вращения. Таким образом можно свести к минимуму ошибочные оценки из-за нарушений состояния дорожного покрытия и т. Д.
[0039] Как описано выше, третий вариант осуществления имеет эффекты, аналогичные эффектам второго варианта осуществления.
[0040] (Другие варианты осуществления)
Режимы для выполнения настоящего изобретения были описаны выше на основе вариантов осуществления, но эти варианты осуществления не предоставлены в качестве ограничения конкретной конфигурации настоящего изобретения; настоящее изобретение даже включает изменения конструкции и т.д., которые не выходят за рамки объема изобретения. Например, в вариантах осуществления источник движущей силы был описан как двигатель, но источником движущей силы может быть электродвигатель. Кроме того, основные ведущие колеса были описаны как левое и правое передние колеса, а вспомогательные ведущие колеса были описаны как левое и правое задние колеса в вариантах осуществления, но основные ведущие колеса могут быть левым и правым задними колесами и вспомогательные ведущие колеса могут быть левым и правым передними колесами.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ РАСПРЕДЕЛЕНИЕМ ДВИЖУЩЕЙ СИЛЫ | 2008 |
|
RU2376174C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2384438C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2388631C2 |
| УСТРОЙСТВО, ВЫПОЛНЕННОЕ С ВОЗМОЖНОСТЬЮ РАСПРЕДЕЛЕНИЯ ДВИЖУЩИХ СИЛ | 2008 |
|
RU2381916C2 |
| ПОВЫШАЮЩАЯ УСТОЙЧИВОСТЬ СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПРОБУКСОВКИ И РЫСКАНИЯ С ДИФФЕРЕНЦИАЛОМ ПОВЫШЕННОГО ТРЕНИЯ | 2007 |
|
RU2449909C2 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗНОЙ/ДВИЖУЩЕЙ СИЛОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНОЙ/ДВИЖУЩЕЙ СИЛОЙ | 2015 |
|
RU2699204C1 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗНОЙ/ДВИЖУЩЕЙ СИЛОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНОЙ/ДВИЖУЩЕЙ СИЛОЙ | 2015 |
|
RU2693424C1 |
| СПОСОБ УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА С ПРИВОДОМ НА ЧЕТЫРЕ КОЛЕСА И УСТРОЙСТВО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ | 2017 |
|
RU2719104C1 |
| Механическая трансмиссия с системой автоматического управления распределением крутящих моментов между колесами автотранспортного средства (4к4) с отключаемым приводом одного из ведущих мостов | 2019 |
|
RU2706681C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖУЩЕЙ СИЛОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2575327C1 |
Группа изобретений относится к области транспортного машиностроения. Способ распределения движущей силы для транспортного средства с приводом на передние и задние колеса включает в себя этапы, на которых: определяют движение с поворотом транспортного средства; определяют недостаточную поворачиваемость транспортного средства; определяют, меньше ли разность скоростей вращения между скоростью вращения основных ведущих колес и скоростью вращения вспомогательных ведущих колес, чем предварительно определенная разность скоростей вращения; увеличивают текущее распределение движущей силы или уменьшают текущее распределение движущей силы на сторону вспомогательных ведущих колес. Устройство управления распределением движущей силы для транспортного средства с приводом на передние и задние колеса снабжено устройством распределения движущей силы. Устройство управления распределением движущей силы дополнительно содержит блок определения поворота, блок определения руления, блок определения разности скоростей вращения. Достигается уменьшение недостаточной поворачиваемости. 2 н. и 5 з.п. ф-лы, 6 ил.
1. Способ распределения движущей силы для транспортного средства с приводом на передние и задние колеса, снабженного устройством распределения движущей силы, которое управляет распределением движущей силы, формируемой источником движущей силы, на основные ведущие колеса и вспомогательные ведущие колеса, причем способ управления распределением движущей силы включает в себя этапы, на которых:
определяют движение с поворотом транспортного средства;
определяют недостаточную поворачиваемость транспортного средства при определении движения с поворотом транспортного средства;
определяют, меньше ли разность скоростей вращения между скоростью вращения основных ведущих колес и скоростью вращения вспомогательных ведущих колес, чем предварительно определенная разность скоростей вращения, при определении недостаточной поворачиваемости транспортного средства;
увеличивают текущее распределение движущей силы на сторону вспомогательных ведущих колес в устройстве распределения движущей силы на первую предварительно определенную величину после определения, что разность скоростей вращения между скоростью вращения основных ведущих колес и скоростью вращения вспомогательных ведущих колес была определена как не меньшая, чем предварительно определенная разность скоростей вращения; и
уменьшают текущее распределение движущей силы на сторону вспомогательных ведущих колес в устройстве распределения движущей силы на вторую предварительно определенную величину после определения, что разность скоростей вращения между скоростью вращения основных ведущих колес и скоростью вращения вспомогательных ведущих колес была определена как меньшая, чем предварительно определенная разность скоростей вращения.
2. Способ распределения движущей силы для транспортного средства с приводом на передние и задние колеса по п.1, дополнительно содержащий этапы, на которых:
поддерживают текущее распределение движущей силы на сторону вспомогательных ведущих колес в устройстве распределения движущей силы после определения, что разность скоростей вращения между скоростью вращения основных ведущих колес и скоростью вращения вспомогательных ведущих колес была определена как меньшая, чем предварительно определенная разность скоростей вращения, а затем уменьшают текущее распределение движущей силы на сторону вспомогательных ведущих колес на вторую предварительно определенную величину после определения, что разность скоростей вращения между скоростью вращения основных ведущих колес и скоростью вращения вспомогательных ведущих колес была определена как меньшая, чем предварительно определенная разность скоростей вращения, по истечении предварительно определенного времени.
3. Способ распределения движущей силы для транспортного средства с приводом на передние и задние колеса по п.1, в котором
предварительно определенная разность скоростей вращения представляет собой первую предварительно определенную разность скоростей вращения и вторую предварительно определенную разность скоростей вращения, меньшую, чем первая предварительно определенная разность скоростей вращения,
поддерживают текущее распределение движущей силы на сторону вспомогательных ведущих колес в устройстве распределения движущей силы после определения, что разность скоростей вращения между скоростью вращения основных ведущих колес и скоростью вращения вспомогательных ведущих колес была определена как меньшая, чем первая предварительно определенная разность скоростей вращения, а затем уменьшают текущее распределение движущей силы на сторону вспомогательных ведущих колес в устройстве распределения движущей силы на вторую предварительно определенную величину после определения, что разность скоростей вращения между скоростью вращения основных ведущих колес и скоростью вращения вспомогательных ведущих колес была определена как меньшая, чем вторая предварительно определенная разность скоростей вращения.
4. Способ распределения движущей силы для транспортного средства с приводом на передние и задние колеса по любому из пп.1-3, в котором
предварительно определенная разность скоростей вращения устанавливается на основе скорости транспортного средства и/или скорости рыскания.
5. Способ распределения движущей силы для транспортного средства с приводом на передние и задние колеса по п.4, в котором
предварительно определенная разность скоростей вращения устанавливается соразмерно большей по мере увеличения скорости транспортного средства и/или скорости рыскания.
6. Способ распределения движущей силы для транспортного средства с приводом на передние и задние колеса по любому из пп.1-5, в котором
основные ведущие колеса представляют собой передние колеса, а вспомогательные ведущие колеса представляют собой задние колеса.
7. Устройство управления распределением движущей силы для транспортного средства с приводом на передние и задние колеса, снабженное устройством распределения движущей силы, которое управляет распределением движущей силы, формируемой источником движущей силы, на основные ведущие колеса и вспомогательные ведущие колеса, причем устройство управления распределением движущей силы, отличающееся тем, что оно содержит:
блок определения поворота, который определяет движение с поворотом транспортного средства;
блок определения руления, который определяет недостаточную поворачиваемость транспортного средства, когда движение с поворотом транспортного средства определяется блоком определения поворота;
блок определения разности скоростей вращения, который определяет, меньше ли разность скоростей вращения между скоростью вращения основных ведущих колес и скоростью вращения вспомогательных ведущих колес, чем предварительно определенная разность скоростей вращения, когда была определена недостаточная поворачиваемость транспортного средства блоком определения руления; и
часть управления распределением движущей силы, которая увеличивает текущее распределение движущей силы на сторону вспомогательных ведущих колес в устройстве распределения движущей силы на первую предварительно определенную величину после определения, что разность скоростей вращения между скоростью вращения основных ведущих колес и скоростью вращения вспомогательных ведущих колес была определена блоком определения разности скоростей вращения как не меньшая, чем предварительно определенная разность скоростей вращения, и
уменьшает текущее распределение движущей силы на сторону вспомогательных ведущих колес в устройстве распределения движущей силы на вторую предварительно определенную величину, когда разность скоростей вращения между скоростью вращения основных ведущих колес и скоростью вращения вспомогательных ведущих колес была определена блоком определения разности скоростей вращения как меньшая, чем предварительно определенная разность скоростей вращения.
| JP 2003159952 A, 03.06.2003 | |||
| JP S63215430 A, 07.09.1988 | |||
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340472C2 |
| СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ РАСПРЕДЕЛЕНИЯ КРУТЯЩЕГО МОМЕНТА МЕЖДУ ПЕРЕДНЕЙ И ЗАДНЕЙ КОЛЕСНЫМИ ОСЯМИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2561485C2 |

