Изобретение относится к автотранспортной грузовой технике, и может быть использовано для взвешивания груза непосредственно на шасси транспортного средства, например в кузове грузового автомобиля или прицепа, полуприцепа, для определения нагрузки на каждую ось и колесо грузового транспортного средства, а также для оперативного дистанционного изменения нагрузки на каждую ось и колесо транспортного средства, в том числе и непосредственно при движении транспортного средства.
Заявляемая бортовая измерительная система грузового транспортного средства служит для определения веса груза и оперативного изменения нагрузки на оси грузовых транспортных средств и содержит измерительные датчики, модуль обработки данных, исполнительные устройства для непосредственного изменения нагрузки на каждое колесо и ось транспортного средства, монитор в кабине, модули связи. Для водителя информация может быть выведена на внешние устройства по CANBUS, RS-485, WiFi, такие как: графический дисплей, цифровой индикатор, внешний бортовой компьютер, смартфон.
Уровень техники
Известно техническое решение по патенту RU 176 599 U1 G01G 19/08 (2006.01) G01G 19/083 (2006.01) с датой приоритета 01.06.2017, по которому УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАГРУЗКИ НА ОСЬ ТРАНСПОРТНОГО СРЕДСТВА включает в себя измеритель деформации ходовой части транспортного средства относительно его оси под действием нагрузки. содержащий корпус, в котором размещены поворотный переменный резистор, вал которого запрессован в подшипник, а также рычажную передачу, связанную с одной стороны посредством поворотного рычага - с концом вала поворотного переменного резистора и с другой стороны - с осью транспортного средства, отличающееся тем, что в упомянутый корпус введена опорная деталь с цилиндрическим отверстием, ось которого является продолжением оси поворота поворотного рычага рычажной передачи, причем с противоположных сторон этого цилиндрического отверстия в опорной детали выполнены посадочные места, в одно из которых запрессован упомянутый подшипник с запрессованным в него валом поворотного переменного резистора, а в другое закреплен упомянутый поворотный переменный резистор, выполненный кольцевой формы.
Недостатками являются ограниченные возможности устройства, громоздкость корпуса, низкая надежность тензоизмерительных мостов, схемы обработки сигналов и низкая ремонтопригодность из-за сложности монтажа элементов электрической измерительной схемы. Недостатком указанного технического решения также является невысокая надежность и точность измерений, сложность устройства и силопередачи весовой нагрузки на датчики, невысокие функциональные возможности устройства.
Известно техническое решение по патенту RU 2711183 C1 G01L 1/22 (2006.01), G01G 19/12 (2006.01), G01B 7/16 (2006.01), дата приоритета 17.06.2019, по которому ТЕНЗОМЕТРИЧЕСКИЙ ДАТЧИК ИЗМЕРЕНИЯ НАГРУЗКИ НА ОСЬ ГРУЗОВОГО ТРАНСПОРТНОГО СРЕДСТВА И СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ НАГРУЗКИ НА ОСЬ ГРУЗОВОГО ТРАНСПОРТНОГО СРЕДСТВА состоит из сборки, содержащей две пары перпендикулярно направленных тензорезисторов фольгового типа на основе константана, представляющих собой полномостовую схему Уитсона, наклеенную в геометрическом центре дугообразной, предварительно отполированной ручным или полумеханическим способом до уровня не менее 7 класса чистоты и затем обезжиренной поверхности металлического элемента конструкции датчика. Конструкция датчика содержит интегрированный во внутрь корпуса датчика электронный модуль обработки сигналов тензорезисторной сборки, включающий 32-битный процессор на основе ядра Cortex-МО, высокоточный цифровой датчик температуры для осуществления процесса температурной компенсации, NFC модуль, позволяющий идентифицировать датчик и передавать служебную информацию беспроводным способом на внешнее беспроводное считывающее устройство и CAN интерфейс для проводной передачи данных на монитор системы для дальнейшей обработки и индикации. Металлическая часть корпуса датчика выполнена из легированной стали марки 40CrNiMoA. Пластиковая часть корпуса выполнена из ударопрочного и маслобензостойкого стеклонаполненного полиамида. Все внутренние элементы конструкции защищены демпфирующим влагостойким компаундом марки "Этал-1480ТГ" для общей защиты конструкции датчика от воздействия окружающей среды. Технический результат: увеличение срока службы датчика и сохранение упругих характеристик в условиях постоянных динамических нагрузок и критических температур, увеличения точности измерений.
Недостатком известного устройства является недостаточная функциональность, а также низкая надежность тензоизмерительных мостов, схемы обработки сигналов и низкая ремонтопригодность из-за сложности монтажа элементов электрической измерительной схемы.
Известно техническое решение по патенту RU 134638 U1 G01G 19/00 (2006.01) дата приоритета 19.04.2013, по которому БОРТОВАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ВЕСА ГРУЗА И КОНТРОЛЯ ЗАГРУЗКИ ТРАНСПОРТНОГО СРЕДСТВА содержит более одного измерительного датчика углового положения (наклономера), подключенного к бортовому вычислительному устройству, отличается тем, что, по меньшей мере, один датчик углового положения установлен в области минимального прогиба рамы транспортного средства под действием веса груза, по меньшей мере, два других датчика углового положения установлены в областях максимального прогиба рамы транспортного средства под действием веса груза, а в бортовое вычислительное устройство введен бортовой блок вычисления веса груза в кузове транспортного средства по показаниям упомянутых датчиков как суммы произведений жесткости рамы на разницу измеренных углов между точками минимального прогиба рамы и максимальных прогибов рамы. Кроме того, в нее могут быть введены распределительная коробка с вторичным источником питания датчиков, упомянутые датчики через распределительную коробку и информационную шину сети CAN соединены с бортовым блоком вычисления веса груза в кузове транспортного средства, а вторичный источник питания через шину питания подключен к бортовой электрической сети датчиков. Полезной моделью обеспечивается технический результат, который заключается в повышении надежности и уменьшения погрешности измерений при одновременном упрощении устройства и снижении его стоимости.
Недостатком известной системы является сложность устройства и его монтажа из-за необходимости нескольких измерительных элементов и обеспечения их ориентации относительно друг друга и условно определяемых положений точек транспортного средства. Недостатком указанного технического решения также является невысокая надежность и недостаточная функциональность системы.
Наиболее близким к заявляемому является техническое решение по патенту RU 2694449 C1, G01G 19/12 (2006.01), дата приоритета 02.11.2018, по которому БОРТОВОЙ АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС СИСТЕМЫ ОПРЕДЕЛЕНИЯ ВЕСА ГРУЗА И НАГРУЗКИ НА ОСЬ ГРУЗОВЫХ ТРАНСПОРТНЫХ СРЕДСТВ содержит измерительные датчики, модуль обработки данных, монитор в кабине с выходом на блок оконечного оборудования CAN с возможностью передачи данных на удаленные мониторы и устройства с использованием интерфейсов CAN, RS232 и RS485, отличающийся тем, что измерительные датчики представляют собой набор струнных, тензометрических и пневматических датчиков, причем струнный датчик состоит из полого металлического стержня, внутри которого расположена струна, а на стержне размещен электронный модуль, который содержит контроллер для обработки данных, трансформаторную катушку, аналогово-цифровой преобразователь (АЦП), цифро-аналоговый преобразователь (ЦАП), усилители сигналов, NTC термистор, драйвер шины CAN, NFC/RFID идентификационную метку, стержень прикреплен к оси транспортного средства, тензометрический датчик фольгового типа представляет собой мостовую схему Уитсона из четырех тензорезисторов, наклеенных непосредственно на боковую поверхность оси транспортного средства и имеющих наклон к линии горизонта 45 градусов, он содержит интегрированный вовнутрь датчика электронный модуль обработки с CAN интерфейсом, пневматические датчики давления установлены в индивидуальные пневмоконтуры каждой оси полуприцепа или прицепа и снабжены электронными модулями обработки данных и выводами на CAN интерфейсы
Недостатком известного технического решения является низкая функциональность, невысокая надежность измерений, производимых датчиками углового положения, а также, невозможность использования на транспортных средствах со смешанной подвеской, включая дополнительные прицепы или полуприцепы. Техническое решение прототипа, как и все известные, только измеряют нагрузку в разных вариантах
Технической задачей, на решение которой направлено заявляемое изобретение, является необходимость высокоточного измерения нагрузки на каждой определенной оси грузового транспортного средства, и оперативного дистанционного изменения нагрузки на каждую ось и колесо транспортного средства, в том числе непосредственно при движении транспортного средства, а также, потребность в использовании весоизмерительной системы на транспортных средствах с разными типами подвески (пневматической, гидравлической, механической, смешанной) с количеством осей транспортного средства до восьми (автопоезд).
Целью изобретения является повышение надежности автотранспортной грузовой техники, в возможности эксплуатации техники в более сложных дорожных условиях при преодолении различных препятствий, за счет высокоточного измерения нагрузки на каждой определенной оси грузового транспортного средства, и оперативного дистанционного изменения нагрузки на каждую ось и на каждое колесо транспортного средства.
Прототип (патент RU 2694449 С1) позволяет только контролировать нагрузки на ось грузового автомобиля. Отличием заявляемого технического решения от прототипа является то, что бортовая измерительная система позволяет не только измерять нагрузку на каждую ось транспортного средства, но и оперативно, в том числе и непосредственно в движении, изменять ее за счет перераспределения между осями и колесами транспортного средства.
Система состоит из следующих частей:
1. Микроконтроллер. Представляет собой контроллер или программируемое реле общего применения, имеющий необходимое количество дискретных и аналоговых входов для подключения датчиков и необходимое количество дискретных выходов для подключения исполнительных устройств (например: Овен ПР102 программируемое реле на 40 каналов ввода/вывода).
2. Модули связи. Служат для связи микроконтроллера с модулем индикации и управления. В зависимости от типа применяемого модуля индикации и управления это могут быть типовые: устройства с использованием интерфейсов CAN, RS232 и RS485; модуль GPS/GSM; модуль WiFi; контроллер USB.
3. Модуль индикации и управления. Служит для отображения информации. Давление в контурах подвески, вес груза, нагрузка на каждую ось или колесо, режимы работы и настройки системы. А также для управления работой системы, изменение настроек. Это может быть графический дисплей, цифровой индикатор, внешний бортовой компьютер, планшет, смартфон.
4. Исполнительное устройство. Устанавливается в индивидуальные пневмоконтуры каждой оси полуприцепа (3 штуки) или каждого отдельного колеса (6 штук). Установка исполнительного устройства на каждое колесо, с одной стороны, удорожает систему, но, с другой стороны, увеличивает быстродействие и возможности системы, а также минимизирует изменения вносимые в штатную систему подвески полуприцепа. Представляет собой отдельный блок в котором смонтированы пневматический аналоговый датчик давления, который служит для измерения давления в контуре и соответственно нагрузки на ось или колесо. А также два электропневматических распределителя, включением и выключением которых, непосредственно производиться изменение давление воздуха в пневмоконтуре оси или в пневмоэлементе каждого отдельного колеса.
5. Датчик препятствия. Их назначение определить точки начала и окончания препятствия, необходимые для работы системы в автоматическом режиме. Это может быть: а) Датчик металла. Он определяет наличие металла на пути проезда колеса. Это к примеру может быть металлическая крышка люка, имеющая недостаточную прочность для того, что бы выдержать давление колеса.
б) Ультразвуковой датчик расстояния (аналог датчика парктроника) автомобилей. Он определяет наличие любого предмета выше или ниже уровня дорожного покрытия: например бордюр, при наезде на который сильно нагруженное колесо может получить повреждение (разрыв шины), или наоборот достаточно глубокая яма, при попадании в которую так же может произойти повреждение подвески, колеса или будет сложно из нее выехать.
в) Видеокамера. Применяется в случае когда работа системы в автоматическом режиме по показаниям датчиков невозможна из-за индивидуальных особенностей препятствия. В этом случае водитель, ориентируясь на изображение с видеокамеры, оценивает сложность препятствия и необходимость работы системы в данном случае. И если работа системы по перераспределению нагрузки необходима, то водитель с модуля управления и индикации в ручном режиме задает точки начала и окончания препятствия.
6. Датчик расстояния. Служит для определения расстояния между точками начала и окончания препятствия, а также расстояниями между препятствием и осями. Представляет собой установленный на одном из колес или ступице круг с выступающими металлическими элементами и установленный напротив этих выступающих элементов типовой индуктивный датчик металла. При вращении колеса металлические элементы круга проходят рядом с индуктивным датчиком металла. В этот момент в датчике появляется импульс, который поступает в микроконтроллер. То есть во время движения автомобиля, при вращении колеса и соответственно прохождении им определенного расстояния с датчика в микроконтроллер поступает определенное количество импульсов. По их количеству микроконтроллер высчитывает все необходимые расстояния и соответственно моменты срабатывания исполнительных устройств.
Технический результат от использования предлагаемого изобретения заключается в повышении надежности и безопасности автотранспортной грузовой техники, в том числе в возможности эксплуатации техники в более сложных дорожных условиях за счет оперативного безопасного преодоления препятствий, которые заявляемая система позволяет преодолеть без ущерба.
Технический результат достигается конструкцией бортовой измерительной системы грузового транспортного средства, содержащей измерительные датчики, модуль обработки данных, модули связи с возможностью передачи данных на удаленные мониторы и устройства, отличающаяся тем, что содержит микроконтроллер, модули связи с возможностью связи микроконтроллера с модулем индикации и управления, исполнительные устройства для непосредственного изменения нагрузки на каждое колесо и ось транспортного средства, при этом каждое исполнительное устройство выполнено как отдельный блок, который содержит пневматический аналоговый датчик давления для измерения давления в контуре и соответственно нагрузки на ось и колесо, и электропневматические распределители, представляющие собой устройства изменения давления воздуха в пневмоконтуре оси и в пневмоэлементе каждого отдельного колеса, содержит также датчик препятствия, датчик расстояния с возможностью определения расстояния между точками начала и окончания препятствия, при этом микроконтроллер содержит систему обработки импульсов с измерительных датчиков с возможностью определения моментов срабатывания исполнительных устройств. Как частный случай датчик препятствия выполнен в виде датчика металла, датчика расстояния, видеокамеры (возможно использование других типовых датчиков при согласовании выходных сигналов). Микроконтроллер представляет собой модуль обработки данных.
Сущность технического решения поясняется изображениями на фиг. 1, 2.
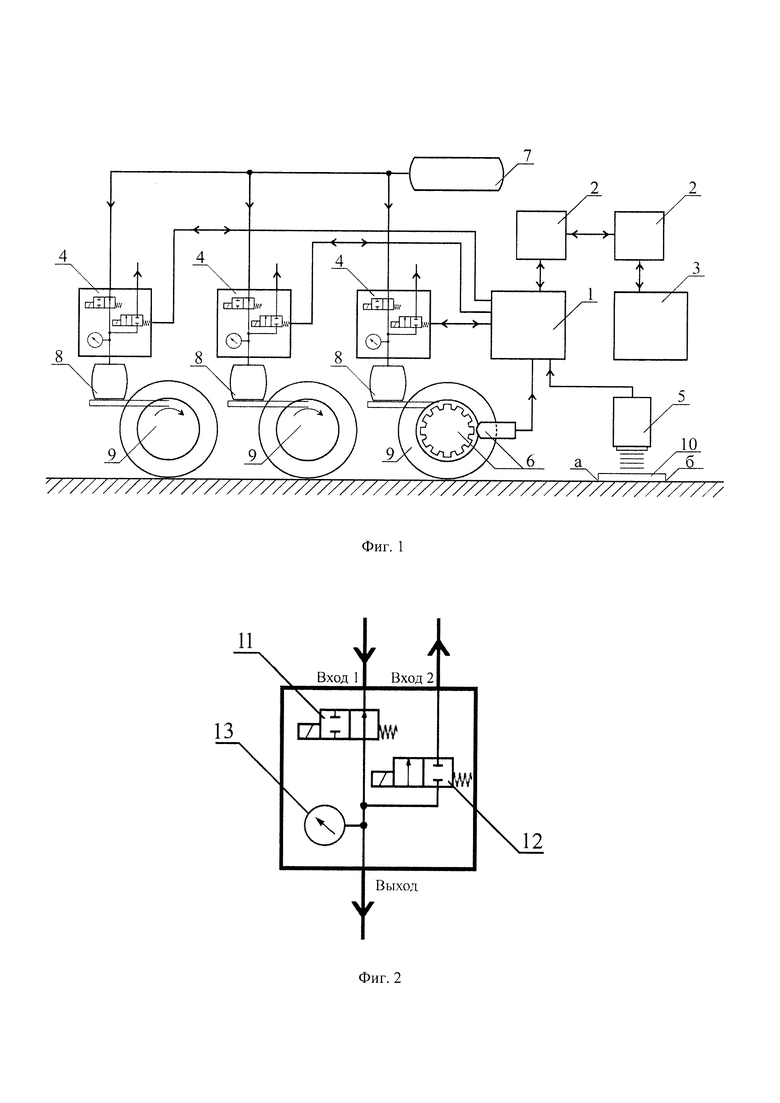
Фиг. 1. Блок-схема бортовой измерительной системы грузового транспортного средства с возможностью распределения давления.
Фиг. 2. Схема исполнительного устройства.
Где 1 - микроконтроллер;
2 - модуль связи;
3 - модуль индикации и управления;
4 - исполнительное устройство;
5 - датчик препятствия;
6 - датчик расстояния;
7 - ресивер штатной системы пневмоподвески полуприцепа;
8 - пневмоэлемент подвески полуприцепа;
9 - колесо полуприцепа;
10 - препятствие;
11 - первый электропневматический распределитель (нормальное положение открытое);
12 - второй электропневматический распределитель (нормальное положение закрытое);
13 - электронный пневматический аналоговый датчик давления.
Пример осуществления
Бортовая измерительная система грузового транспортного средства содержит микроконтроллер 1, модуль связи 2 с возможностью связи микроконтроллера с модулем индикации и управления 3, исполнительное устройство 4, представляющее собой отдельный блок, в котором смонтированы пневматический аналоговый датчик давления 13, который служит для измерения давления в контуре и соответственно нагрузки на ось и колесо 9, а также датчик препятствия 5, датчик расстояния 6 с возможностью определения расстояния между точками начала и окончания препятствия. Микроконтроллер 1 содержит систему обработки импульсов с датчиков с возможностью определения моментов срабатывания исполнительных устройств, а электропневматические распределители 11, 12 каждого исполнительного устройства 4 представляют собой устройства изменения давления воздуха в пневмоконтуре оси и в пневмоэлементе каждого отдельного колеса.
Бортовая измерительная система грузового транспортного средства работает следующим образом.
На примере трехосного полуприцепа с пневматической подвеской.
Препятствие - металлическая крышка люка с недостаточной механической прочностью.
При движении полуприцепа когда металлическая крышка попала в зону действия датчика препятствия (датчик металла) тот посылает сигнал в микроконтроллер (точка а) (фиг. 1). После выхода препятствия из зоны действия датчика (точка б) сигнал с датчика препятствия перестает поступать.
Микроконтроллер с помощью датчика расстояния (по количеству поступивших за это время импульсов) высчитывает длину препятствия, и зная расстояние от датчика препятствия до первой оси (которое задается изначально при установке и настройке системы) при приближении первого колеса к препятствию включает исполнительное устройство первой оси.
Магистраль со сжатым воздухом от штатной системы подвески полуприцепа подключена ко входу 11 исполнительного устройства, а вход 12 остается свободным. При включении исполнительного устройства 4 срабатывают оба электропневматических распределителя 11, 12. Первый распределитель 11, который до этого находился в нормально открытом положении, закрывается и отсоединяет штатный пневмоэлемент 8 подвески полуприцепа от магистрали по которой в пневмоэлемент 8 поступал сжатый воздух. Второй распределитель 12, который до этого находился в нормально закрытом положении, открывается и начинает выпускать в атмосферу воздух из пневмоэлемента 8. Давление в нем и соответственно давления колеса на грунт начинает уменьшаться. При достижении заранее заданного давления которое определяется настройками через модуль индикации и управления 3 и контролируется пневматическим аналоговым датчиком давления 13, входящим в состав исполнительного устройства 4, второй распределитель 12 закрывается. Тем самым фиксирует нужное (пониженное) давление в пневмоэлементе 8 колеса (пневмоконтуре оси). И соответственно пониженное давление колеса 9 на препятствие 10. После прохождения колесом препятствия, которое определяется с помощью датчика расстояния 6 (по количеству поступивших импульсов), отключается первый электропневматический распределитель 11. Тем самым соединяет обратно пневмоэлемент 8 с магистралью сжатого воздуха полуприцепа. Воздух снова начинает поступать в пневмоэлемент 8 и в нем восстанавливается давление, которое было изначально установлено во всей системе пневмоподвески полуприцепа.
Затем при прохождении определенного расстояния, которое задается при настройке системы (расстояние между первой и второй осями полуприцепа) происходит срабатывание исполнительного устройства 4 второй оси, а затем и третьей оси. Процессы поочередно повторяются.
Датчиков препятствия 5 может быть два. Один установлен впереди (по ходу движения) от осей полуприцепа, другой сзади. Это необходимо, что система работала как при движении вперед, так и при движении задним ходом. Переключение на работу при движении задним ходом происходит автоматически. Это обеспечивается подключением определенного управляющего входа микроконтроллера 1 системы к проводу штатной системы электропитания полуприцепа, по которому подается напряжение к лампам заднего хода в задних габаритных фонарях. Также возможна установка сразу всех типов датчиков препятствия 5. Датчики могут устанавливаться в разных, наиболее удобных местах полуприцепа. Расстояние от каждого датчика до осей настраивается индивидуально после установки при начальной настройке системы. Выбор датчика, по которому будет работать система в каждом конкретном случае определяет водитель через настройки в модуле индикации и управления 3.
Система может работать в нескольких режимах, которые выбираются водителем с модуля индикации и управления.
Режим взвешивания. В данном случае система не вмешивается в работу штатной системы подвески полуприцепа, а только отображает нагрузки на каждую ось и общий вес груза с помощью пневматических аналоговых датчиков входящих в состав исполнительных устройств. Возможности системы можно расширить установив отдельные дополнительные датчики давления на остальные оси транспортных средств входящих в состав автопоезда. В зависимости от типа подвески это могут быть пневматические аналоговые датчики аналогичные применяемым в исполнительных устройствах. Или тензометрические датчики общего применения для механической подвески. (Как в известных устройствах общий вес груза высчитывается в контроллере путем суммирования показаний всех осей).
Автоматический режим работы. Это режим работы, который был описан выше.
Полуавтоматический режим работы. Этот режим отличается от автоматического тем, что управляющий работой системы сигнал поступает не с датчика препятствия, а устанавливается вручную водителем. Например по изображению с видеокамеры.
Ручной режим. В этом режиме водитель в настройках предусмотренных в модуле индикации и управления может устанавливать разное давление на каждой оси или колесе (при установке исполнительных устройств на каждое колесо). Данная возможность к примеру позволяет продолжить движение при недостаточном давлении в шине или повреждении одного из колес или повреждении подшипника ступицы.
Выключенная система. При выключении системы, а также при отсутствии электропитания или какой то неисправности. Система не влияет, не препятствует работе штатной системы пневмоподвески полуприцепа. Это обусловлено тем, что электропневматические распределители (11, 12), входящие в состав исполнительных устройств 4, при отсутствии электропитания находятся в таком положении, которое не изменяет схему штатной подвески полуприцепа.
Работы системы при механической подвеске.
Все компоненты системы в данном случае те же. Но для работы системы с механической (рессорной) подвеской необходимо на каждую ось или колесо дополнительно установить типовое устройство для подъема оси. Тип устройства выбирается индивидуально в каждом конкретном случаи в зависимости от конструкции подвески.
Основная работа системы происходит аналогичным образом. Отличие заключается в том, что исполнительные устройства 4 подключены и работают по другому. Магистраль со сжатым воздухом подключена ко входу 2, а вход 1 остается свободным (открытым). При включении исполнительного устройства так же срабатываю оба электропневматических распределителя. Первый распределитель, который до этого находился в нормально открытом положении, закрывается для предотвращения выхода воздуха в атмосферу. Второй распределитель, который до этого находился в нормально закрытом положении, открывается и через него начинает поступать воздух в пневмоэлемент механизма подъема оси. Давление в нем увеличивается, ось начинает приподниматься и соответственно давления оси на грунт начинает уменьшаться. При достижении заранее заданного давления которое определяется настройками через модуль индикации и управления и контролируется пневматическим аналоговым датчиком давления, входящим в состав исполнительного устройства, второй распределитель закрывается. Тем самым фиксирует нужное (высокое) давление в пневмоэлементе механизма подъема оси. И соответственно пониженное давление оси на препятствие. После прохождения колесом препятствия, которое определяется с помощью датчика расстояния (по количеству поступивших импульсов), отключается первый электропневматический распределитель 11 (открывается). Через него сжатый воздух из пневмоэлемента 8 выходит в атмосферу. Соответственно давление в пневмоэлементе 8 уменьшается, ось опускается и давление на грунт восстанавливается. То есть при работе системы с пневматической подвеской задача исполнительного устройства, при прохождении препятствия, снизить давление в штатном пневмоэлементе до нужного значения, а при работе с механической подвеской наоборот повысить (создать) давление в пневмоэлементе механизма подъема оси.
Работа системы с пневмоподвеской и механизмами подъема осей.
На большинстве современных полуприцепах изначально установлены (на одной - двух осях) механизмы подъема оси. Оси поднимают при движении без груза. Такая опция предназначена для сохранения покрышек от лишнего износа. Дополнительно помогает снизить нагрузку на подшипники и улучшить управляемость полуприцепом в поворотах. Если машина идет пустой, то просто так сжигается до 10% топлива, которое уходит на преодоление сопротивления трех пар колес, находящихся на полуприцепе. При подъеме «лишних» осей расход топлива соответственно снижается. Управление подьемом осей, как правило, осуществляется с помощью пневматического крана с ручным (механическим) управлением, расположенного в задней части полуприцепа. Установив исполнительные устройства 4 данной системы на пневмоэлементы 8 механизмов подъема осей возможно управление подъемом дистанционно, не выходя из кабины. А при установке механизмов подъема на все оси полуприцепа и соответственно установке исполнительных устройств на пневмоэлементы механизмов подъема осей, а также и на пневмоэлементы 8 подвески, возможности системы еще более расширяются. Так, при прохождении препятствия типа крышка люка, работа системы будет осуществляться по принципу поочередного снижения давления на каждой оси. А при прохождении препятствия, типа бордюр или яма, возможно не только снижение давления, но и поочередно поднимать оси в момент преодоления препятствия.
При возможном повреждении колеса (разрыв шины, заклинивании подшипника ступицы и т.д.) система позволяет оперативно поднять поврежденное колесо и продолжить движение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бортовой аппаратно-программный комплекс системы определения веса груза и нагрузки на ось грузовых транспортных средств | 2018 |
|
RU2694449C1 |
| СИСТЕМА МОНИТОРИНГА ОСЕВЫХ НАГРУЗОК ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ C ПНЕВМАТИЧЕСКОЙ ПОДВЕСКОЙ | 2024 |
|
RU2830054C1 |
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС И СПОСОБ ДЛЯ ИЗМЕРЕНИЯ НАГРУЗКИ НА ГУСАК ПОЛУПРИЦЕПА | 2023 |
|
RU2826865C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕСА ГРУЗА И КОНТРОЛЯ ЗАГРУЗКИ ТРАНСПОРТНОГО СРЕДСТВА И БОРТОВАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445586C1 |
| ПНЕВМАТИЧЕСКОЕ ОБОРУДОВАНИЕ ТРАНСПОРТНОГО СРЕДСТВА, ПЕРЕКЛЮЧАЮЩЕЕ КЛАПАННОЕ УСТРОЙСТВО ДЛЯ ПНЕВМАТИЧЕСКОГО ОБОРУДОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2529246C1 |
| ПЕРЕДВИЖНАЯ УСТАНОВКА ДЛЯ ВОЗБУЖДЕНИЯ СЕЙСМИЧЕСКИХ ВОЛН | 2005 |
|
RU2289150C1 |
| ГАЗОВАЯ ГОРЕЛКА | 2022 |
|
RU2797620C1 |
| ПОЛУПРИЦЕП | 2004 |
|
RU2280582C2 |
| Роботизированный комплекс управления коробкой переключения передач транспортного средства с механической трансмиссией | 2023 |
|
RU2811218C1 |
| ПОДВЕСКА АВТОМОБИЛЯ | 2011 |
|
RU2472639C1 |
Изобретение относится к автотранспортной грузовой технике и может быть использовано для взвешивания груза непосредственно на шасси транспортного средства, например в кузове грузового автомобиля или прицепа, полуприцепа, для определения нагрузки на каждую ось и колесо грузового транспортного средства, а также для оперативного дистанционного изменения нагрузки на каждую ось и колесо транспортного средства, в том числе и непосредственно при движении транспортного средства. Устройство содержит микроконтроллер, модули связи с возможностью связи микроконтроллера с модулем индикации и управления, исполнительные устройства для непосредственного изменения нагрузки на каждое колесо и ось транспортного средства. При этом каждое исполнительное устройство выполнено как отдельный блок, который содержит пневматический аналоговый датчик давления для измерения давления в контуре и соответственно нагрузки на ось и колесо и электропневматические распределители, представляющие собой устройства изменения давления воздуха в пневмоконтуре оси и в пневмоэлементе каждого отдельного колеса, содержит датчик препятствия, датчик расстояния с возможностью определения расстояния между точками начала и окончания препятствия. При этом микроконтроллер содержит систему обработки импульсов с измерительных датчиков с возможностью определения моментов срабатывания исполнительных устройств. Технический результат заключается в повышение надежности и безопасности автотранспортной грузовой техники, в том числе в возможности эксплуатации техники в более сложных дорожных условиях и оперативном безопасном преодолении препятствий. 4 з.п. ф-лы, 2 ил. 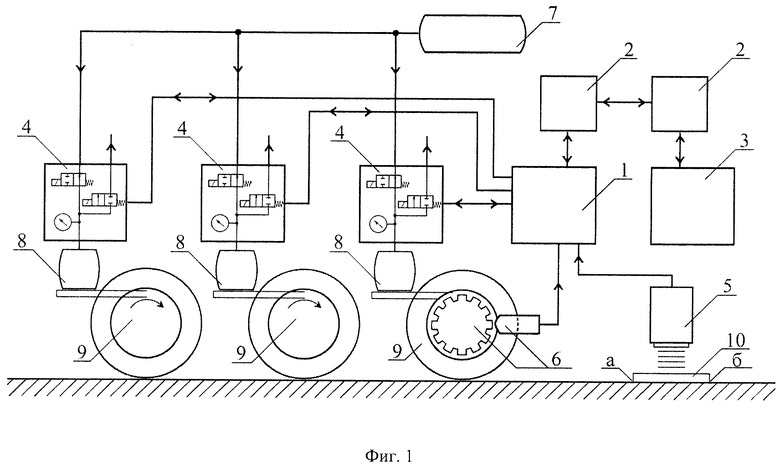
1. Бортовая измерительная система грузового транспортного средства, содержащая измерительные датчики, модуль обработки данных, модули связи с возможностью передачи данных на удаленные мониторы и устройства, отличающаяся тем, что содержит микроконтроллер, модули связи с возможностью связи микроконтроллера с модулем индикации и управления, исполнительные устройства для непосредственного изменения нагрузки на каждое колесо и ось транспортного средства, при этом каждое исполнительное устройство выполнено как отдельный блок, который содержит пневматический аналоговый датчик давления для измерения давления в контуре и соответственно нагрузки на ось и колесо и электропневматические распределители, представляющие собой устройства изменения давления воздуха в пневмоконтуре оси и в пневмоэлементе каждого отдельного колеса, содержит также датчик препятствия, датчик расстояния с возможностью определения расстояния между точками начала и окончания препятствия, при этом микроконтроллер содержит систему обработки импульсов с измерительных датчиков с возможностью определения моментов срабатывания исполнительных устройств.
2. Бортовая измерительная система грузового транспортного средства по п. 1, отличающаяся тем, что датчик препятствия выполнен как датчик металла.
3. Бортовая измерительная система грузового транспортного средства по п. 1, отличающаяся тем, что датчик препятствия выполнен как датчик расстояния.
4. Бортовая измерительная система грузового транспортного средства по п. 1, отличающаяся тем, что датчик препятствия выполнен как видеокамера.
5. Бортовая измерительная система грузового транспортного средства по п. 1, отличающаяся тем, что микроконтроллер представляет собой модуль обработки данных
| Бортовой аппаратно-программный комплекс системы определения веса груза и нагрузки на ось грузовых транспортных средств | 2018 |
|
RU2694449C1 |
| WO 2017222987 A1, 28.12.2017 | |||
| СПОСОБ ЗАПАРКИ КОКОНОВ | 0 |
|
SU201172A1 |
| СИСТЕМА ДЛЯ ИНДИКАЦИИ СОСТОЯНИЯ ЗАГРУЗКИ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2456171C2 |
| US 7621538 B2, 24.11.2009 | |||
| US 7816613 B2, 19.10.2010 | |||
| Вакуум-аппарат непрерывного действия для уваривания сахарных утфелей | 1960 |
|
SU134638A1 |

