ОБЛАСТЬ ТЕХНИКИ
Настоящее техническое решение относится к способам мониторинга осевых нагрузок прицепов или полуприцепов, реализованным для идентификации осевого перегруза прицепов или полуприцепов и измерения фактической осевой нагрузки на дорожное полотно, с возможностью параметризации оборудования транспортного средства без использования эталонного груза или весового оборудования.
УРОВЕНЬ ТЕХНИКИ
Из уровня техники известен источник информации RU 2 694 449 C1, опубликованный 15.07.2019 г., раскрывающий бортовой аппаратно-программный комплекс системы определения веса груза и нагрузки на ось грузовых транспортных средств. Бортовой аппаратно-программный комплекс системы определения веса груза и нагрузки на ось грузовых транспортных средств содержит измерительные датчики, модуль обработки данных, монитор в кабине с выходом на блок оконечного оборудования CAN с возможностью передачи данных на удаленные мониторы и устройства с использованием интерфейсов CAN, RS232 и RS485. Измерительные датчики представляют собой набор струнных, тензометрических и пневматических датчиков. Струнный датчик состоит из полого металлического стержня, внутри которого расположена струна, а на стержне размещен электронный модуль, который содержит контроллер для обработки данных, трансформаторную катушку, аналогово-цифровой преобразователь (АЦП), цифро-аналоговый преобразователь (ЦАП), усилители сигналов, NTC термистор, драйвер шины CAN, NFC/RFID идентификационную метку, стержень прикреплен к оси транспортного средства. Тензометрический датчик фольгового типа представляет собой мостовую схему Уитстона из четырех тензорезисторов, наклеенных непосредственно на боковую поверхность оси транспортного средства и имеющих наклон к линии горизонта 45 градусов, он содержит интегрированный вовнутрь датчика электронный модуль обработки с CAN интерфейсом. Пневматические датчики давления установлены в индивидуальные пневмоконтуры каждой оси полуприцепа или прицепа, и снабжены электронными модулями обработки данных и выводами на CAN интерфейсы.
Из уровня техники известен источник информации US10500975B1, опубликованный 10.12.2019, раскрывающий систему оценки веса транспортного средства и связанные с ней методы. Из источника информации известна система оценки веса транспортного средства, предусмотренная на буксируемом транспортном средстве для определения или расчета массы, по меньшей мере, буксируемого транспортного средства во время движения. Система предусматривает датчик веса, для определения массы транспортного средства.
Предлагаемое техническое решение направлено на устранение недостатков современного уровня техники и отличается от известных решений тем, что предложенное решение позволяет осуществлять автоматическую параметризацию оборудования транспортного средства без применения эталонного груза или весового оборудования.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Технической задачей, на решение которой направлено заявленное техническое решение, является создание способа мониторинга осевых нагрузок прицепов или полуприцепов, реализованного для идентификации осевого перегруза прицепов или полуприцепов и измерения фактической осевой нагрузки на дорожное полотно.
Техническим результатом, достигающимся при решении вышесказанной технической задачи, является повышение точности при идентификации перегруза прицепов и полуприцепов и измерение фактической нагрузки на дорожное полотно, с последующим переводом результатов измерений в значения массы.
Заявленный технический результат достигается за счет осуществления способа мониторинга осевых нагрузок прицепов или полуприцепов, реализованного для идентификации осевого перегруза прицепов или полуприцепов и измерения фактической осевой нагрузки на дорожное полотно, включающего этапы, на которых: осуществляется параметризация оборудования транспортного средства, а именно: после монтажа системы мониторинга осевых нагрузок и подключения всех периферийных устройств, включенных в систему и подачи питания на систему мониторинга, осуществляют запуск блока управления и активацию точки доступа Wi-Fi; осуществляют инициализацию оборудования транспортного средства; осуществляют подключение вычислительного устройства к блоку управления; осуществляют инициализацию контроллера блока управления; осуществляют ввод информации на вычислительном устройстве, которая, помимо информации о дате производства изделия, серийном номере, наименовании изготовителя, типа транспортного средства, содержит в себе следующие данные: количество осей транспортного средства; пара значений "давление-масса" для порожнего транспортного средства, заданных табличными значениями производителей осей транспортных средств, соответствующие для каждой оси; пара значений "давление-масса" для груженого транспортного средства, заданных табличными значениями производителей осей транспортных средств, соответствующие для каждой оси; после ввода информации и подтверждения введённой информации, вычислительное устройство формирует данные в машиночитаемом виде и передает их в контроллер блока управления с применением контроля ошибок; в процессе передачи параметрических данных контроллер передает по внутреннему каналу связи параметрические данные в постоянное запоминающее устройство, находящееся внутри блока управления, для сохранения и последующего вызова этих данных при проведении дальнейших расчетов нагрузки на оси транспортного средства;
после чего по меньшей мере один датчик давления, встраиваемый в пневмомагистраль пневмоподвески транспортного средства, осуществляет измерение изменения давления в пневматической подвеске прицепа или полуприцепа под воздействием массы груза, расположенного на платформе прицепа или полуприцепа; при изменении давления осуществляется деформация измерительной мембраны по меньшей мере одного датчика давления, в результате чего на выходе изменяется аналоговый сигнал; измененный выходной сигнал с датчика давления, в свою очередь, принимается аналого-цифровым преобразователем головного блока управления, а затем обрабатывается и преобразуется микроконтроллером, согласно алгоритму расчета, основанному на расчете массы груза в зависимости от создаваемого давления в пневмоподвеске прицепа или полуприцепа под воздействием массы груза, размещенного в кузове прицепа или полуприцепа согласно параметрическим данным, записанным на этапе параметризации блока управления системы мониторинга осевых нагрузок; осуществляют фиксацию результатов измерений во внутренней памяти блока управления в зашифрованном виде; после чего полученные данные отображают на вычислительном устройстве пользователя и/или на индикаторе транспортного средства в виде числового значения в тоннах нагрузки на каждую ось и нагрузку на группу осей.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Реализация изобретения будет описана в дальнейшем в соответствии с прилагаемыми чертежами, которые представлены для пояснения сути изобретения и никоим образом не ограничивают область изобретения. К заявке прилагаются следующие чертежи:
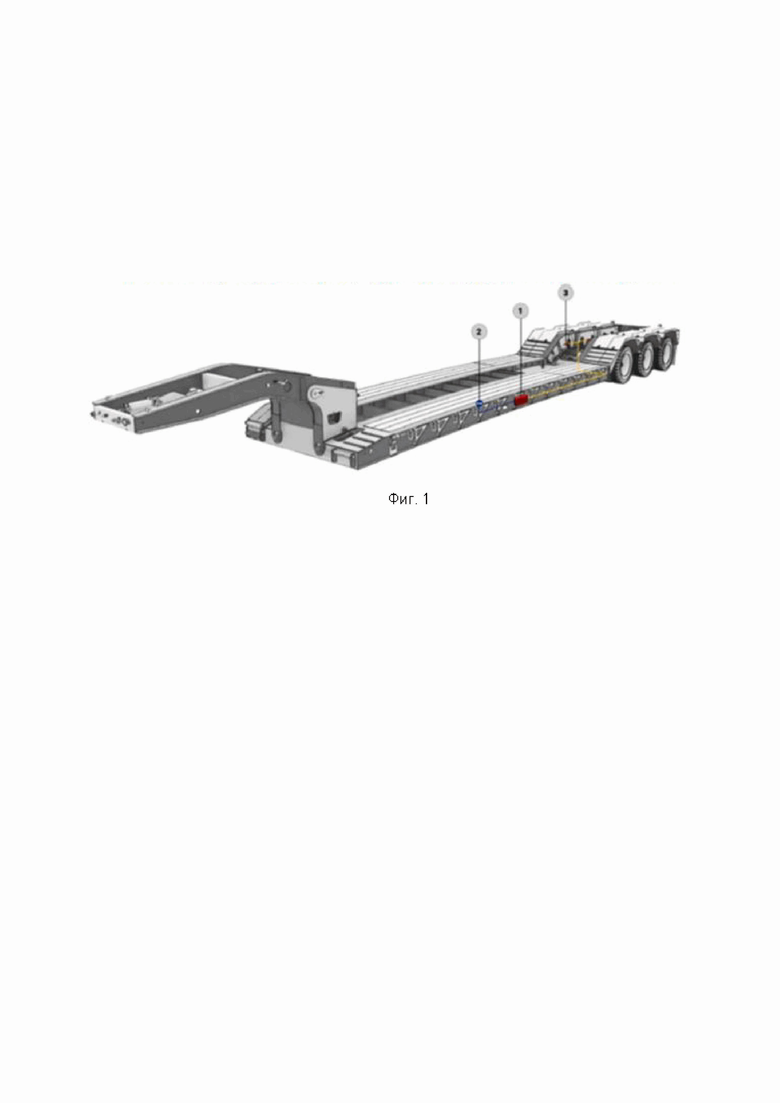
Фиг. 1 иллюстрирует схему размещения базовых компонентов, необходимых для реализации заявленного технического решения.
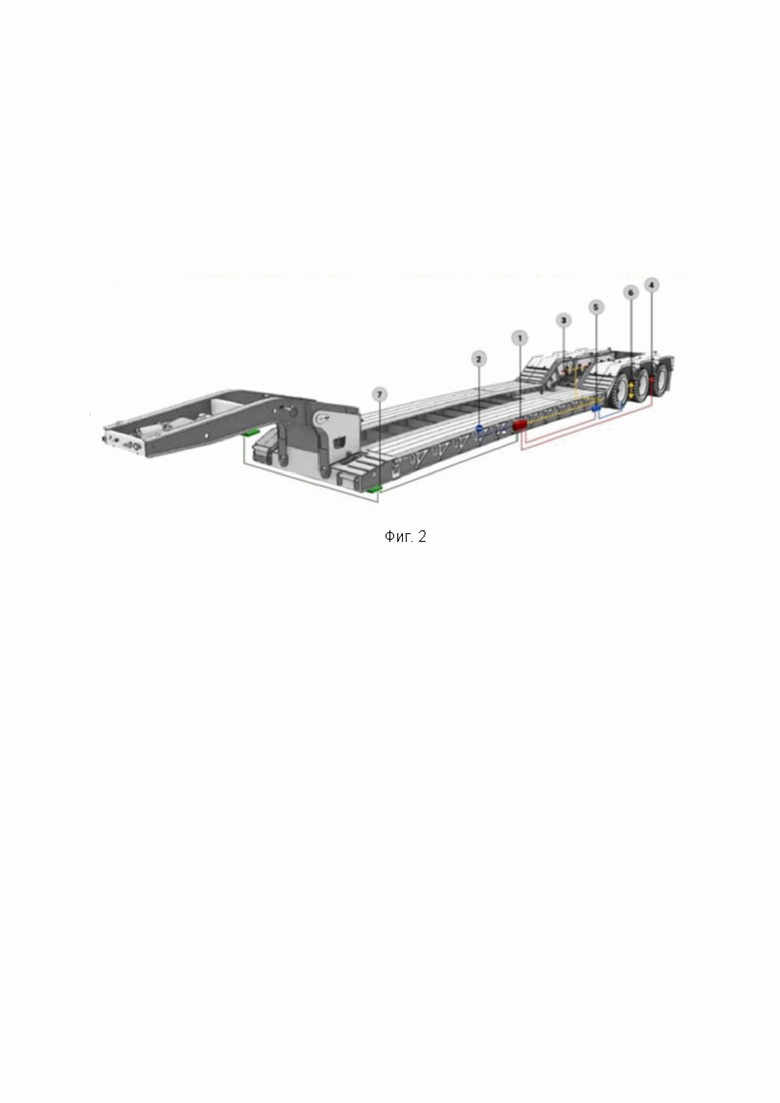
Фиг. 2 иллюстрирует набор оборудования с дополнительным функционалом.
ДЕТАЛЬНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В приведенном ниже подробном описании реализации изобретения приведены многочисленные детали реализации, призванные обеспечить отчетливое понимание предлагаемого изобретения. Однако, квалифицированному в предметной области специалисту, будет очевидно каким образом можно использовать настоящее изобретение, как с данными деталями реализации, так и без них. В других случаях хорошо известные методы, процедуры и компоненты не были описаны подробно, чтобы не затруднять понимание особенностей настоящего изобретения.
Кроме того, из приведенного изложения будет ясно, что изобретение не ограничивается приведенной реализацией. Многочисленные возможные модификации, изменения, вариации и замены, сохраняющие суть и форму настоящего изобретения, будут очевидными для квалифицированных в предметной области специалистов.
Настоящее техническое решение предназначено для эффективной и точной идентификации перегруза прицепов и полуприцепов и качественного измерения фактической нагрузки на дорожное полотно, с последующим переводом результатов измерений в значения массы.
Техническое решение полностью решает поставленную задачу, а в качестве дополнительного технического результата может учитываться обеспечение возможности отслеживания фактической нагрузки на оси транспортного средства и нагрузки на группу осей, с фиксацией результатов измерений во внутренней памяти блока управления системы мониторинга осевых нагрузок в зашифрованном виде.
Необходимо отметить, что заявленное техническое решение, в отличии от предшествующего уровня техники, позволяет осуществлять автоматическую параметризацию оборудования транспортного средства без применения эталонного груза или весового оборудования.
Первоначальная параметризация оборудования транспортного средства осуществляется путем установления связи вычислительного устройства по беспроводному интерфейсу или проводным способом с головным блоком управления и передачи в него параметрических данных. Данный процесс включает в себя несколько этапов.
После монтажа системы мониторинга осевых нагрузок и подключения всех периферийных устройств, включенных в систему и подачи питания на систему мониторинга, происходит запуск блока управления и активация точки доступа Wi-Fi.
После прохождения внутренних тестов система переходит в рабочий режим и может быть подвергнута процессу параметризации. Под внутренними тестами понимаются процедуры, которые блок управления проводит при включении, для выявления доступности (инициализации) внутренних модулей и возможности запуска системы в рабочий режим. В рабочем режиме, посредством вычислительного устройства осуществляется инициализация контроллера блока управления.
После инициации контроллера блока управления осуществляется ввод информации на вычислительном устройстве, которая, помимо информации о дате производства изделия, серийном номере, наименовании изготовителя, типа транспортного средства, содержит в себе следующие данные:
i. Количество осей транспортного средства;
ii. Пара значений «давление-масса» для порожнего транспортного средства, заданных табличными значениями производителей осей транспортных средств, соответствующие для каждой оси;
iii. Пара значений «давление-масса» для груженого транспортного средства, заданных табличными значениями производителей осей транспортных средств, соответствующие для каждой оси.
После ввода информации и подтверждения, вычислительное устройство подготавливает и упорядочивает параметрические данные в машиночитаемом виде и передает их по беспроводному интерфейсу или проводным способом в контроллер блока управления с применением контроля ошибок. В процессе передачи параметрических данных контроллер передает по внутреннему каналу связи вышеуказанные параметрические данные в постоянное запоминающее устройство, находящееся внутри блока управления, для сохранения и последующего вызова этих данных для проведения расчетов нагрузки на оси транспортного средства.
В предпочтительном варианте реализации настоящего технического решения используются следующие техническое элементы: датчики давления (один и более), блок управления, микроконтроллер блока управления, кабель подключения питания блока управления к бортовой сети прицепа или полуприцепа, вычислительное устройство. В частном варианте реализации возможно подключение штатных датчиков скорости и управление штатными пневмоклапанами с электронным управлением подъема-опускания «подъемных осей» транспортного средства. Также возможно подключение двух инклинометров для определения углов между любыми двумя плоскостями транспортного средства.
По меньшей мере один датчик давления, встраиваемый в пневмомагистраль пневмоподвески транспортного средства, осуществляет измерение изменения давления в пневматической подвеске прицепа или полуприцепа под воздействием массы груза, расположенного на платформе прицепа или полуприцепа. Датчик/датчики давления измеряют изменение давления в абсолютных величинах.
В предпочтительном варианте реализации блок управления располагается в произвольно выбранном месте на раме прицепа или полуприцепа. По меньшей мере один датчик давления встраивается в пневмомагистрали пневмоподвески транспортного средства с помощью специализированных фитингов. В основу определения нагрузки на ось транспортного средства закладывается изменение давления в пневмоподвеске транспортного средства при изменении нагрузки на транспортное средство.
При изменении давления происходит деформация измерительной мембраны датчика давления, в результате чего изменяется аналоговый сигнал на выходе. Выходной сигнал с датчика, в свою очередь, воспринимается аналого-цифровым преобразователем головного блока управления системы мониторинга, а затем обрабатывается микроконтроллером и преобразуется, согласно алгоритму расчета и расчетных таблиц соответствия давления в пневмоподвеске и нагрузок при данном давлении оси транспортного средства. Питание блока управления подключается к штатной сети прицепа или полуприцепа.
Фиксация результатов измерений во внутренней памяти блока управления осуществляется в зашифрованном виде, после чего полученные данные отображаются пользователю на вычислительном устройстве и/или на индикаторе транспортного средства в виде числового значения в тоннах нагрузки на каждую ось и нагрузку на группу осей.
Функционал сохранения во внутренней памяти блока управления данных о нагрузках на оси транспортного средства, а также дополнительной информации с датчиков скорости, инклинометров и статусе положении подъемных осей транспортного средства осуществляется в зашифрованном виде, без возможности просмотра и корректировки файла памяти конечным пользователем.
Полученные данные отображают на вычислительном устройстве пользователя и/или на индикаторе транспортного средства в виде числового значения в тоннах нагрузки на каждую ось и нагрузку на группу осей
Под персональным устройством пользователя, в материалах настоящей заявки, понимается смартфон, планшетный компьютер, ноутбук с предустановленным программным обеспечением, для отображения информации от блока управления.
Вычислительная система блока управления, обеспечивающая работу предлагаемого решения, содержит микроконтроллер с встроенной флеш-памятью программ, оперативную память для вычислений, средство хранения данных в виде отдельного энергонезависимого постоянного-запоминающего устройства, интерфейсы ввода/вывода RS-485 и RS-232, средства сетевого взаимодействия по беспроводной линии Wi-Fi.
Микроконтроллер устройства выполняет управление аналого-цифровым преобразователем, преобразующем сигналы от тензометрических датчиков устройства в цифровую форму, все вычислительные операции, необходимые для функционирования устройства, согласно команд программы, расположенной в его внутренней памяти, а также управляет режимами передачи обработанных данных и приема команд извне по внутренним линиям интерфейса цифровой логики схемы.
Средство хранения данных выполнено в виде флэш-памяти на самой печатной плате устройства. Средство хранения данных позволяет выполнять долгосрочное хранение осевых нагрузок и различного вида информации о выполненных операциях взвешивания с контролем давления в пневмоподвеске транспортного средства и расчетом нагрузочных значений. В случае подключения к блоку управления системы мониторинга осевых нагрузок дополнительных датчиков: датчиков скорости, инклинометров, датчика подъемной оси, все данные, поступающие с вышеупомянутых датчиков также заносятся в память блока управления и наряду с данными об осевых нагрузках хранятся во внутренней памяти блока управления в зашифрованном виде.
Указанная информации хранится в памяти в виде файлов в хронологическом порядке.
Интерфейс устройства представляет собой стандартные средства для подключения и работы по RS-485 или RS-232 с внешним устройством, например, GPRS-трекером и т.п.
В качестве средства ввода-вывода данных в устройстве, реализующем описываемый способ, используется персональное устройство пользователя (планшет, телефон и т.п.) или стационарный индикатор. Обмен с персональным устройством пользователя производится посредством беспроводной передачи по линии Wi-Fi. Мобильный телефон или планшет, при наличии соответствующего программного обеспечения, позволяет выполнять калибровку устройства, диагностику датчиков и индикацию полученных результатов работы устройства.
В качестве примера реализации вышеупомянутого решения будет описан опыт его внедрения на полуприцепе 9942L3 (низкорамный трал). Система мониторинга осевых нагрузок была смонтирована согласно фигуре 1.
Порядок проведения монтажа и параметризации оборудования.
1) Блок управления был размещен на боковой раме полуприцепа.
2) Питание блока управление было подключено к штатной сети 24В.
3) Была осуществлена параметризация оборудования транспортного средства, а именно: после монтажа системы мониторинга осевых нагрузок и подключения всех периферийных устройств, включенных в систему и подачи питания на систему мониторинга, был осуществлен запуск блока управления и активирована точка доступа Wi-Fi; была осуществлена инициализация оборудования транспортного средства; осуществлено подключение вычислительного устройства (в данном конкретном случае это был персональный компьютер фирмы ASUS под управлением ОС Windows 10) к блоку управления; осуществлена инициализация контроллера блока управления; осуществлен ввод информации на вычислительном устройстве, которая, помимо информации о дате производства изделия, серийном номере, наименовании изготовителя, типа транспортного средства, содержала в себе следующие данные: количество осей транспортного средства - 3; пара значений "давление-масса" для порожнего транспортного средства, заданных табличными значениями производителей осей транспортных средств (в данном случае это были оси фирмы BPW), соответствующие для каждой оси; пара значений "давление-масса" для груженого транспортного средства, заданных табличными значениями производителей осей транспортных средств (в данном случае фирмы BPW), соответствующие для каждой оси; после ввода информации и подтверждения введённой информации, вычислительное устройство сформировало данные в машиночитаемом виде и передало их в контроллер блока управления с применением контроля ошибок; в процессе передачи параметрических данных контроллер передал по внутреннему каналу связи параметрические данные в постоянное запоминающее устройство, находящееся внутри блока управления, для сохранения и последующего вызова этих данных при проведении дальнейших расчетов нагрузки на оси транспортного средства;
4) Один датчик давления, был установлен в пневмомагистраль пневмоподвески транспортного средства, для осуществления измерения изменения давления в пневматической подвеске полуприцепа.
Порядок проведения измерений осевых нагрузок.
В целях проведения сравнительного анализа и подтверждения корректности отображения осевых нагрузок с применением системы мониторинга осевых нагрузок были использованы следующие инструменты и вспомогательные элементы:
1) груз в виде бетонных пирамид - 3 шт.;
2) поосные автомобильные весы фирмы CAS модель RW-P 15 (класс точности весов по МР №76 МОЗМ / ГОСТ №29329-92 - IV/обычный).
Испытания проводились на территории предприятия-изготовителя транспортного средства в августе 2023 года.
После выполнения параметрической калибровки были выполнены измерения осевых нагрузок системой, а также проведен контроль фактического веса осевой нагрузки с помощью поосных весов при различных загрузках трала грузом в рабочем положении (расположение груза на площадке трала ТС осуществлялось согласно требованиям по транспортировке).
Результаты выполненных измерений представлены в таблице 1.
Таблица 1
Проведенные испытания подтвердили правильность алгоритмической и аппаратной реализации предлагаемого технического решения для использования на транспортных средствах с пневматической подвеской.
В настоящих материалах заявки было представлено предпочтительное раскрытие осуществление заявленного технического решения, которое не должно использоваться как ограничивающее иные, частные воплощения его реализации, которые не выходят за рамки испрашиваемого объема правовой охраны и являются очевидными для специалистов в соответствующей области техники.
Изобретение относится к способам мониторинга осевых нагрузок прицепов или полуприцепов, реализованным для идентификации осевого перегруза и измерения фактической осевой нагрузки на дорожное полотно, с возможностью параметризации оборудования транспортного средства без использования эталонного груза или весового оборудования. Способ мониторинга включает этапы, на которых: осуществляется параметризация оборудования транспортного средства, далее вычислительное устройство формирует данные и передает их в контроллер блока управления с применением контроля ошибок; в процессе передачи параметрических данных контроллер передает по внутреннему каналу связи параметрические данные в постоянное запоминающее устройство, находящееся внутри блока управления, для сохранения и последующего вызова этих данных; после чего датчик давления осуществляет измерение изменения давления в пневматической подвеске прицепа или полуприцепа под воздействием массы груза; при изменении давления осуществляется деформация измерительной мембраны; измененный выходной сигнал принимается АЦП головного блока управления, а затем обрабатывается и преобразуется микроконтроллером; осуществляют фиксацию результатов измерений во внутренней памяти блока управления в зашифрованном виде; после чего полученные данные отображают на вычислительном устройстве пользователя и/или на индикаторе транспортного средства в виде числового значения в тоннах нагрузки на каждую ось и нагрузки на группу осей. Технический результат - повышение точности при идентификации перегруза прицепов и полуприцепов и измерение фактической нагрузки на дорожное полотно с последующим переводом результатов измерений в значения массы. 2 ил.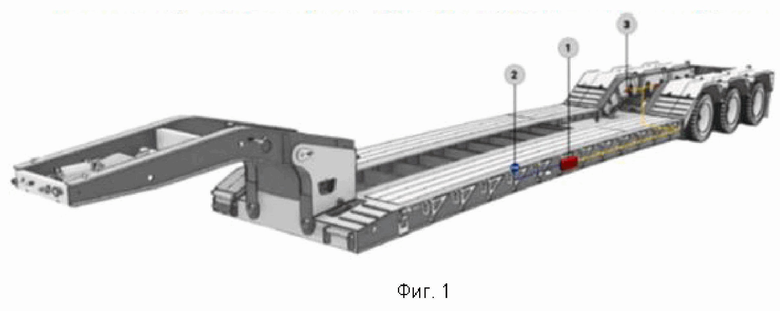
Способ мониторинга осевых нагрузок в пневматической подвеске прицепов или полуприцепов, реализованный для идентификации осевого перегруза прицепов или полуприцепов и измерения фактической осевой нагрузки на дорожное полотно, включающий этапы, на которых:
осуществляется параметризация оборудования транспортного средства, а именно: после монтажа системы мониторинга осевых нагрузок и подключения всех периферийных устройств, включенных в систему, и подачи питания на систему мониторинга осуществляют запуск блока управления и активацию точки доступа Wi-Fi; осуществляют инициализацию оборудования транспортного средства; осуществляют подключение вычислительного устройства к блоку управления; осуществляют инициализацию контроллера блока управления; осуществляют ввод информации на вычислительном устройстве, которая, помимо информации о дате производства изделия, серийном номере, наименовании изготовителя, типа транспортного средства, содержит в себе следующие данные: количество осей транспортного средства; пара значений "давление-масса" для порожнего транспортного средства, заданных табличными значениями производителей осей транспортных средств, соответствующими для каждой оси; пара значений "давление-масса" для груженого транспортного средства, заданных табличными значениями производителей осей транспортных средств, соответствующими для каждой оси; после ввода информации и подтверждения введенной информации вычислительное устройство формирует данные в машиночитаемом виде и передает их в контроллер блока управления с применением контроля ошибок; в процессе передачи параметрических данных контроллер передает по внутреннему каналу связи параметрические данные в постоянное запоминающее устройство, находящееся внутри блока управления, для сохранения и последующего вызова этих данных при проведении дальнейших расчетов нагрузки на оси транспортного средства;
после чего по меньшей мере один датчик давления, встраиваемый в пневмомагистраль пневмоподвески транспортного средства, осуществляет измерение изменения давления в пневматической подвеске прицепа или полуприцепа под воздействием массы груза, расположенного на платформе прицепа или полуприцепа; при изменении давления осуществляется деформация измерительной мембраны по меньшей мере одного датчика давления, в результате чего на выходе изменяется аналоговый сигнал; измененный выходной сигнал с датчика давления, в свою очередь, принимается аналого-цифровым преобразователем головного блока управления, а затем обрабатывается и преобразуется микроконтроллером согласно алгоритму расчета, основанному на расчете массы груза в зависимости от создаваемого давления в пневмоподвеске прицепа или полуприцепа под воздействием массы груза, размещенного в кузове прицепа или полуприцепа согласно параметрическим данным, записанным на этапе параметризации блока управления системы мониторинга осевых нагрузок; осуществляют фиксацию результатов измерений во внутренней памяти блока управления в зашифрованном виде; после чего полученные данные отображают на вычислительном устройстве пользователя и/или на индикаторе транспортного средства в виде числового значения в тоннах нагрузки на каждую ось и нагрузки на группу осей.
| Бортовой аппаратно-программный комплекс системы определения веса груза и нагрузки на ось грузовых транспортных средств | 2018 |
|
RU2694449C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И ИНДИКАЦИИ СОСТОЯНИЯ ЗАГРУЗКИ СЕДЕЛЬНОГО ПРИЦЕПА | 1994 |
|
RU2116207C1 |
| AT 529726 T, 15.11.2011 | |||
| CA 2960787 A1, 18.08.2011 | |||
| DE 112014004391 T5, 16.06.2016 | |||
| DE 102019114259 A1, 03.12.2020 | |||
| БСКП для ТС с пневмоподвеской [Электронный ресурс]// URL: https://web.archive.org/web/20220627214427/https://vesasystem.ru/f/opisanie_raboty.pdf Дата выкладки в сеть Интернет: | |||

