Изобретение относится к автоматике и может быть использовано для высокоточного автоматического регулирования движения осей оптических телескопов и лидарных станций обнаружения и сопровождения космических объектов.
Известны цифровые электроприводы (патент США №4235072, МПК G04C 3/00, опубл. 25 ноября 1980; авт. св. СССР №1830598, МПК Н02К 29/06, опубл. 25 июля 1990; патент (полезная модель) РФ №2071164, МПК Н02Р 05/06, G05B 11/16, опубл. 27 декабря 1996), содержащие задающее устройство, цифровой регулятор, усилитель мощности, исполнительный двигатель и объект регулирования. Известные устройства характеризуются низкой динамической точностью в связи с низким порядком астатизма систем управления, низкой точностью измерения положения и низкими показателями надежности узла "усилитель мощности - исполнительный двигатель".
Наиболее близким к заявляемому изобретению является цифровой электропривод, выбранный авторами за прототип (патент на изобретение №2404449, МПК G05B 11/26, опубл. 20 ноября 2010), содержащий задающее устройство, последовательно соединенные регулятор положения, регулятор скорости, регулятор тока, второй вход которого через датчик тока соединен с измерительным выходом исполнительного двигателя, вал которого через редуктор механически связан с объектом управления, широтно-импульсный модулятор, выход которого соединен с усилителем мощности, генератор опорного напряжения, датчики положения грубого и точного отсчетов, преобразователь угол-код, датчик скорости, причем датчики скорости и положения жестко укреплены на исполнительной оси электропривода за редуктором, управляющие входы датчиков положения соединены с выходом генератора опорного напряжения, а выходы датчиков положения соединены с преобразователем угол-код, выход которого соединен со вторым входом регулятора положения, выход датчика скорости соединен со вторым входом регулятора скорости.
Известное устройство обладает следующим недостатком: узел "широтно-импульсный преобразователь - исполнительный двигатель" имеет низкий показатель надежности в связи с тем, что исполнительный двигатель выполнен в виде двигателя с коллекторно-щеточным механизмом - двигателя постоянного тока, а также с тем, что выход из строя широтно-импульсного преобразователе приводит к неработоспособности системы. Для применения в крупногабаритных системах управления, таких как большие телескопы, известное устройство не является оптимальным в связи с трудностью демонтажа и замены исполнительного двигателя.
Задача, решаемая заявляемым изобретением, заключается в повышении показателя надежности системы цифрового электропривода с одновременным упрощением процедуры его демонтажа и ремонта за счет применения вентильного двигателя с дисковым статором, разделенным на три сегмента, содержащих каждый собственную трехфазную обмотку, питание которой осуществляется от отдельного инвертора.
Поставленная задача решается за счет того, что в цифровом электроприводе, содержащем задающее устройство, выход которого соединен с регулятором положения, выход которого соединен с регулятором скорости, широтно-импульсный модулятор, исполнительный двигатель выполнен дисковым беззубцовым вентильным, разделенным на три сегмента, каждый из которых соединен с отдельным усилителем мощности и с датчиками токов фаз каждого сегмента, соединенных с блоком вычисления момента, выход которого соединен с регулятором момента, второй вход которого соединен с выходом регулятора скорости, а выход - с широтно-импульсным модулятором, выход которого соединен с тремя усилителями мощности сегментов двигателя, электропривод дополнительно снабжен датчиком положения, вход которого соединен с двигателем, а выход - с контроллером датчика положения, выход которого соединен со вторым входом регулятора положения и через блок вычисления скорости - со вторым входом регулятора скорости. Кроме того, прецизионный датчик положения ротора исполнительного двигателя выполнен в виде квазиабсолютного оптического энкодера.
В основе предлагаемого технического решения лежит разделение обмоточной зоны дискового вентильного двигателя на несколько независимых статорных обмоток, взаимодействующих с общим ротором, содержащим постоянные магниты. Каждая из обмоток питается от отдельного инвертора, причем все инверторы управляются от общего датчика положения ротора, формирующего сигнал, на основании которого обеспечивается синусоидальное питание фаз двигателя. Таким образом, выход из строя любой из обмоточных зон или отказ инвертора не приводит к остановке всей системы, поскольку оставшаяся часть комбинированного ВД будет продолжать функционировать.
Заявляемое изобретение поясняется чертежом, на котором представлена структурная схема заявляемого цифрового электропривода. На схеме изображены:
задающее устройство 1, последовательно соединенные регулятор положения 2, регулятор скорости 3, регулятор момента 4, второй вход которого соединен с блоком вычисления момента двигателя 5, соединенного с тремя блоками датчиков фазных токов 6-8, соединенных с тремя сегментами 9-11 исполнительного двигателя 12, входы которых соединены с выходами трех усилителей мощности 13-15, входы которых соединены с тремя выходами широтно-импульсного модулятора 16, вход которого соединен с выходом регулятора момента, абсолютный прецизионный датчик положения 17, жестко укрепленный на исполнительной оси электродвигателя, соединенной также с исполнительной осью телескопа 20, причем управляющий выход датчика положения соединен с блоком контроллера датчика положения 18, выход которого соединен со вторым входом регулятора положения, а также через блок вычисления скорости 19 со вторым входом регулятора скорости.
В качестве задающего устройства (1) в цифровом электроприводе используется компьютер, в функции которого входят: задание требуемого положения исполнительной оси, задание различных режимов работы, визуализация текущего состояния цифрового электропривода. В режиме программного наведения координатная траектория движения хранится в памяти управляющего компьютера и формируется в виде цифрового сигнала задания на входе контура регулирования положения с частотой не менее 1000 Гц.
В качестве регуляторов момента (4), угловой скорости (3) и углового положения (2) используются цифровые пропорционально интегрально дифференциальные (ПИД) регуляторы, реализованные на базе цифрового сигнального процессора TMS320C28346ZFE с плавающей точкой, со встроенным формирователем широтно-модулированных сигналов (ШИМ) (16) управления до 18 транзисторными ключами усилителей мощности (13-15).
Усилители мощности каждого сегмента реализованы по мостовой схеме широтно-импульсного преобразователя (ШИП) на транзисторах VT1-VT6 силовых модулей 5-го поколения (Mitsubishi PM75RLB120). В диагональ каждого моста подсоединяется сегмент статорной обмотки исполнительного вентильного двигателя, на который подается ШИМ - напряжение частотой 20 кГц. В качестве драйверов транзисторов (не показаны) взяты микросхемы HCPL-0454 со встроенными оптронными развязками.
Датчики тока (6-8) реализованы на основе безындукивных резисторов LTO 030 с точностью номинала 1% и установлены последовательно в каждой фазе каждого сегмента двигателя (всего 9 штук). На выходе датчиков тока (6-8) установлены RC фильтры низкой частоты и масштабирующие усилители (не показаны), реализованные на микросхемах HCPL7800.
Блок вычисления момента двигателя (5) реализован программно на базе цифрового сигнального процессора TMS320C28346ZFE, данные в который поступают с микроконтроллера датчиков тока TMS320F28335 (на схеме не показан), осуществляющего АЦП преобразование сигналов и вычисление моментов, развиваемых каждым сегментом двигателя.
В качестве датчика положения (17) используется 31-разрядный квазиабсолютный оптический энкодер фирмы Heidenhain, инкрементального типа с дистанционно кодированными референтными метками и четырьмя считывающими головками на полном обороте. Для интерпретации сигналов с датчика используется отдельный микроконтроллер датчика положения (18) TMS320F28335, информация с которого поступает на цифровой сигнальный процессор TMS320C28346ZFE.
Блок вычисления скорости (19) реализован программно на базе цифрового сигнального процессора TMS320C28346ZFE на основании вычисленных в контроллере датчика положения данных об угле поворота ротора двигателя.
Заявляемое устройство работает следующим образом: сигнал задания, сформированный задающим устройством (1), поступает на вход трехконтурной подчиненной системы управления, в состав которой в соответствии с чертежом входят контур регулирования момента исполнительного вентильного двигателя, включающий в себя ПИД регулятор момента (4), датчики тока фаз (6-8) сегментов двигателя (9-11), контур регулирования угловой скорости вращения исполнительной оси (20) цифрового электропривода, включающий в себя блок вычисления скорости (19) и ПИД регулятор скорости (3), и контур регулирования углового положения исполнительной оси (20), включающий соответственно датчик положения (17), контроллер датчика положения (18) и ПИД регулятор положения (2). Сигнал управления, поступающий с задающего устройства (1) на вход контура регулирования углового положения, сравнивается в контуре регулирования с сигналом, поступающим с квазиабсолютного датчика углового положения (17), представляющим собой 31 разрядный цифровой код. Полученный сигнал ошибки, преобразованный регулятором углового положения (2), является входным по отношению к контуру регулирования скорости, в котором сигнал ошибки по скорости, полученный сравнением входного сигнала контура с сигналом, поступающим с блока вычисления скорости (19), после преобразования его ПИД регулятором скорости (3) поступает на вход контура регулирования момента исполнительного двигателя (12), осуществляющего аналогичную контурам положения и скорости процедуру. Трехконтурная подчиненная система управления, обеспечивающая регулирование углового положения исполнительной оси (20) цифрового электропривода с астатизмом второго порядка, синтезирует сигнал управления, поступающий через широтно-импульсный модулятор (16) на усилители мощности (13-15), формирующие питание сегментов исполнительного двигателя (9-11), который подает указанное задающим устройством движение на исполнительную ось цифрового электропривода (20), соединенную с исполнительным механизмом - осью телескопа.
По сравнению с известным устройством предлагаемое устройство обладает повышенным показателем надежности за счет разделения дискового статора вентильного двигателя на три отдельных зоны, содержащих каждая собственную трехфазную обмотку, питание которой осуществляется от отдельного инвертора, так как, во-первых, в исполнительном двигателе отсутствует щеточно-коллекторный механизм, а во-вторых, в случае поломки в узле "широтно-импульсный преобразователь - исполнительный двигатель" система будет продолжать функционировать за счет двух оставшихся секторов исполнительного двигателя, а ремонт устройства не потребует трудновыполнимой замены статора двигателя исполнительной оси: замене будет подлежать лишь сектор двигателя, снятие которого с оси не представляет существенных трудностей. Кроме того, заявляемый цифровой электропривод обладает расширенным диапазоном регулирования скорости в область инфранизких скоростей как следствие увеличения точности измерения положения исполнительной оси цифрового электропривода, которое в цифровой системе управления достигается за счет увеличения разрядности измерения положения до 31 разряда и увеличения производительности цифровой системы управления цифрового электропривода за счет реализации ее с применением микроконтроллера TMS320C28346ZFE.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2404449C1 |
| ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ | 1996 |
|
RU2098917C1 |
| Электропривод постоянного тока | 1978 |
|
SU773880A1 |
| ЭЛЕКТРОПРИВОД С ПОВЫШЕННОЙ ЧУВСТВИТЕЛЬНОСТЬЮ К ОТРАБОТКЕ МАЛЫХ УГЛОВЫХ СКОРОСТЕЙ ВРАЩЕНИЯ | 2018 |
|
RU2707578C1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1524153A1 |
| Управляемый вентильный электродвигатель | 1989 |
|
SU1700705A2 |
| Вентильный электродвигатель | 1989 |
|
SU1670753A2 |
| НИЗКОСКОРОСТНОЙ ПРЕЦИЗИОННЫЙ ЭЛЕКТРОПРИВОД С КОМПЕНСАЦИЕЙ ВЛИЯНИЯ НЕСООСНОСТИ МЕХАНИЧЕСКОЙ ПЕРЕДАЧИ | 2021 |
|
RU2772727C1 |
| Цифровой электропривод | 1986 |
|
SU1390759A1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ СКОРОСТИ ПОДАЧИ СТРЕЛОВИДНОГО ИСПОЛНИТЕЛЬНОГО ОРГАНА ПРОХОДЧЕСКОГО КОМБАЙНА | 2011 |
|
RU2464420C1 |
Изобретение относится к автоматике и может быть использовано для высокоточного автоматического регулирования движения осей оптических телескопов и лидарных станций обнаружения и сопровождения космических объектов. Техническим результатом является повышение показателя надежности системы цифрового электропривода с одновременным упрощением процедуры его демонтажа и ремонта за счет применения вентильного двигателя с дисковым статором, разделенным на три сегмента. Для этого предложен цифровой электропривод, содержащий задающее устройство, выход которого соединен с регулятором положения, выход которого соединен с регулятором скорости, широтно-импульсный модулятор, исполнительный двигатель, при этом исполнительный двигатель выполнен дисковым беззубцовым вентильным, разделенным на три сегмента, каждый из которых соединен с отдельным усилителем мощности и с датчиками токов фаз каждого сегмента, соединенных с блоком вычисления момента, выход которого соединен с регулятором момента, второй вход которого соединен с выходом регулятора скорости, а выход - с широтно-импульсным модулятором, выход которого соединен с тремя усилителями мощности сегментов двигателя, электропривод дополнительно снабжен датчиком положения, вход которого соединен с двигателем, а выход - с контроллером датчика положения, выход которого соединен со вторым входом регулятора положения и через блок вычисления скорости - со вторым входом регулятора скорости. 1 з.п. ф-лы, 1 ил.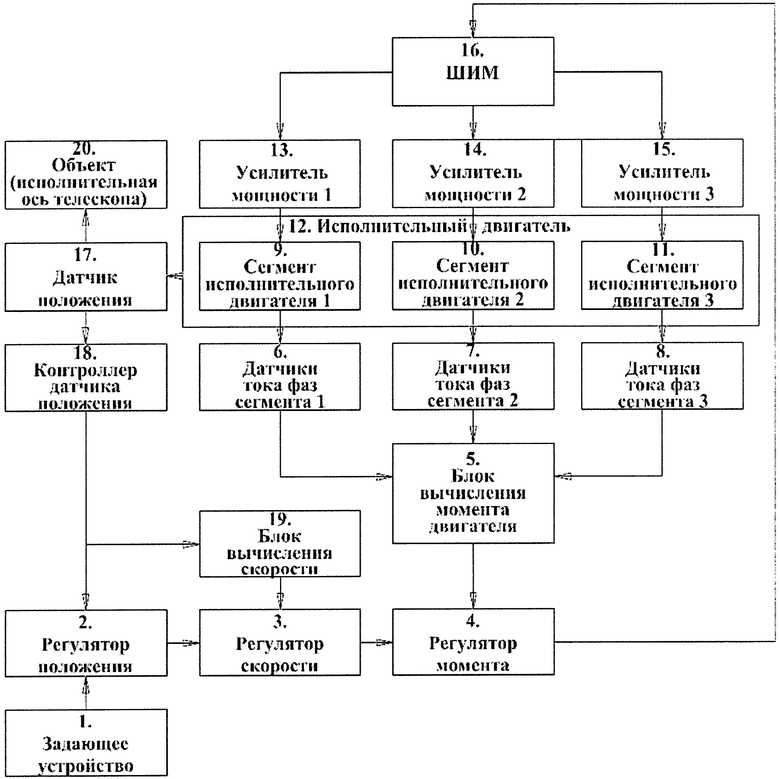
1. Цифровой электропривод, содержащий задающее устройство, выход которого соединен с регулятором положения, выход которого соединен с регулятором скорости, широтно-импульсный модулятор, исполнительный двигатель, отличающийся тем, что исполнительный двигатель выполнен дисковым беззубцовым вентильным, разделенным на три сегмента, каждый из которых соединен с отдельным усилителем мощности и с датчиками токов фаз каждого сегмента, соединенных с блоком вычисления момента, выход которого соединен с регулятором момента, второй вход которого соединен с выходом регулятора скорости, а выход - с широтно-импульсным модулятором, выход которого соединен с тремя усилителями мощности сегментов двигателя, электропривод дополнительно снабжен датчиком положения, вход которого соединен с двигателем, а выход - с контроллером датчика положения, выход которого соединен со вторым входом регулятора положения и через блок вычисления скорости - со вторым входом регулятора скорости.
2. Цифровой электропривод по п.1, отличающийся тем, что прецизионный датчик положения ротора исполнительного двигателя выполнен в виде квазиабсолютного оптического энкодера.
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2404449C1 |
| Электропривод постоянного тока | 1982 |
|
SU1102000A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| US 7084594 B2, 01.08.2006 | |||

