Изобретение относится к нефтегазодобывающей и горной промышленности, а именно, к способу считывания информации с RFID-меток, установленных на нефтяном и газовом буровом оборудовании и может быть использовано для определения глубины расположения, скорости прохождения и времени нахождения бурильной трубы в составе буровых колонн в стволе скважины в процессе бурения и других спускоподъемных операций.
Изобретение является промышленно применимым.
Бурильные колонны, используемые при бурении нефтяных и газовых скважин, состоят из труб различных типов. Глубокие скважины часто имеют более 600 стыков бурильных труб в стволе скважины, в дополнение к бурильным трубам бурильные колонны могут включать такие инструменты, как утяжеленные бурильные трубы, расширители, стабилизаторы, стыковые переходники для различных резьбовых соединений, предохранительные клапаны, специальные инструменты для каротажа.
Бурильные трубы являются основной частью бурильной колонны, предназначенной для спуска в буровую скважину и подъема породоразрушающего инструмента, передачи вращения, создания осевой нагрузки на инструмент, транспортирования бурового раствора к забою скважины. Они же составляют существенную часть всех затрат на нефтегазодобычу. Поэтому важно иметь эффективные средства контроля за всем жизненным циклом бурильной трубы, включая ее эксплуатацию непосредственно на буровых.
В настоящее время известно использование RFID-технологий такими компаниями, как Schlumberger, Petrobas (Petroleo Brasileiro S.A.), Weatherford International Ltd, China Petroleum & Chemical Corporation (Sinopec), ООО «Горизонты роста». Применение RFID-технологии заключается в установке на каждую трубу RFID-метки, которая несет уникальную информацию об этой конкретной трубе.
Считывание информации с RFID-метки в необходимые моменты, может дать возможность точно рассчитать глубину расположения, скорость движения и время нахождения бурильной трубы в буровой скважине в процессе бурения.
В устье скважины непосредственно под роторным столом размещают устройство для излучения и приема радиоволн - RFID-антенны и RFID-сканер с системой регистрации, запоминания и хранения данных. В бурильных трубах, иных механизмах и приспособлениях в составе бурильных колонн устанавливаются радиочастотные идентификаторы (RFID-метки). Глубина, скорость движения и время нахождения бурильной трубы, другого бурильного инструмента в скважине определяются путем регистрации RFID-меток во время спуска или подъема буровой колонны. Регистрация спуска и подъема осуществляется в момент прохождения участка бурильной трубы, несущей на себе RFID-метку, мимо RFID-антенны.
Глубина расположения и время нахождения бурильной трубы в скважине рассчитывается в режиме реального времени посредством математического алгоритма, заложенного в регистрирующий физические процессы программно-аппаратный комплекс АРБИ.
Глубина, скорость движения и время нахождения в скважине бурильной-трубы рассчитываются с помощью детализации буровой колонны по элементам, а расчет, в свою очередь, реализован в программно-аппаратном комплексе АРБИ (Свидетельства РФ на ЭВМ №№2019661321, 2020617486), работающим в настоящее время на буровых установках в режиме тестирования.
Целью изобретения является определение глубины расположения, скорости движения и времени нахождения бурильной трубы в скважине при бурении и других спускоподъемных операциях.
Настоящее изобретение реализует замкнутый цикл контроля работы буровой колонны от установки RFID-меток до расчета глубины расположения, скорости движения и времени нахождения бурильной трубы в скважине. Измерения и расчет ведутся в режиме онлайн, автоматически, без участия оператора.
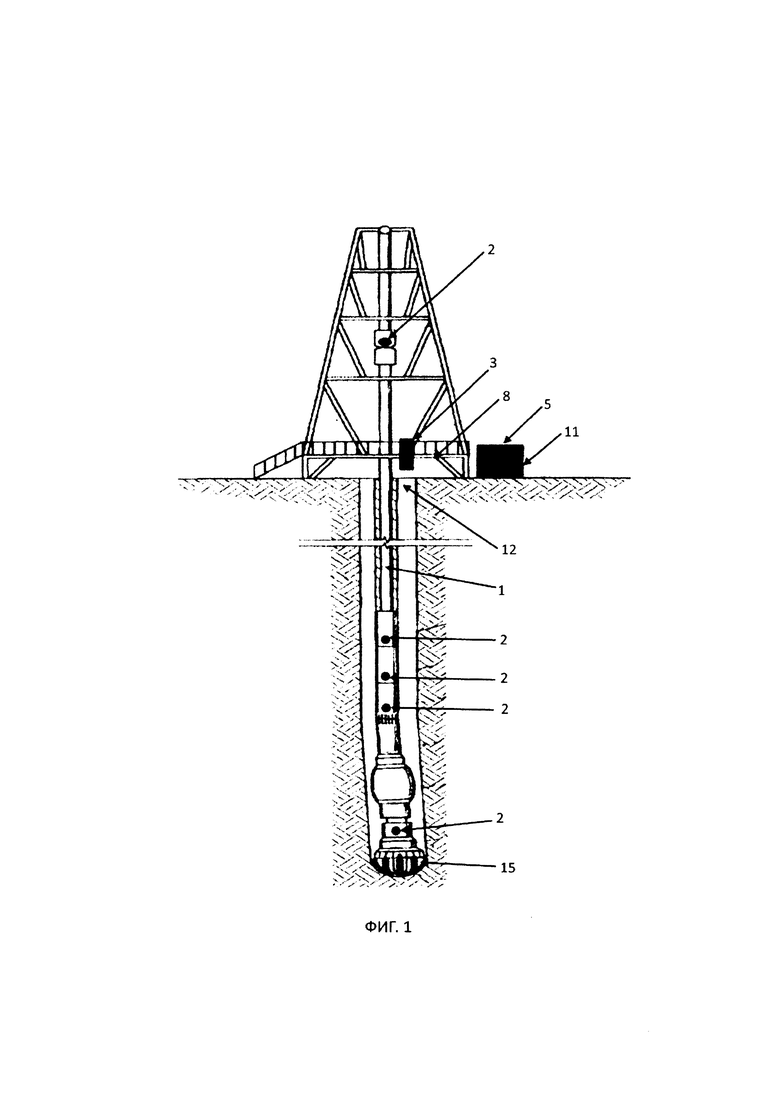
Сущность изобретения поясняется на Фиг. 1, где схематически показан принцип работы устройства, обеспечивающего реализацию предложенного способа.
Поставленная цель достигается тем, что предложенный способ включает в себя устройство, регистрирующее точные моменты времени спуска бурильной трубы в скважину и подъема бурильной трубы из скважины для каждой отдельной трубы в составе колонны.
Трубы бурильной колонны, промаркированы в определенных местах радиочастотными RFID-метками, измерительная система, состоящая из RFID-антенн и RFID-сканера, считывает эти метки, а специальное программное обеспечение (программа АРБИ), управляющее измерениями, обрабатывает полученные данные и производит расчеты.
Суть способа определения глубины расположения, скорости движения и времени нахождения бурильной трубы в скважине заключается в нижеследующем.
В устье скважины, непосредственно под роторным столом монтируются RFID-антенны, к антеннам подключается система регистрации, запоминания и обработки информации в виде RFID-сканера. В механизмы и элементы, входящие в состав бурильной колонны, устанавливаются радиочастотные RFID-метки, с помощью которых регистрирующая система, RFID-антенны и RFID-сканер определяют точное время прохождения мимо антенн маркированной трубы. При прохождении бурильной трубы с установленной RFID-меткой мимо RFID-антенны, сигнал, полученный от RFID-метки, передается на регистратор данных, RFID-сканер, связанный с локальным сервером со специальным программным обеспечением «АРБИ», где эта программа «АРБИ» на основании полученных от меток данных рассчитывает глубину, на которой находится каждая бурильная труба, время нахождения этой бурильной трубы в скважине и скорость движения бурильной трубы в скважине.
Сущность алгоритма, рассчитывающего скорость движения бурильной колонны при бурении или другой спускоподъемной операции, заключается в обработке временных интервалов между регистрацией последовательно проходящих бурильных труб известной длины с установленными RFID-метками в составе бурильной колонны мимо RFID-антенн. Определение текущей глубины конкретной, спускаемой в скважину, бурильной трубы рассчитывается путем последовательного суммирования длин бурильных труб, следующих за этой бурильной трубой, для которой рассчитывается глубина. Определение текущей глубины поднимаемой из скважины бурильной трубы идет в обратном порядке - последовательным вычитанием из набранной трубой при спуске глубины длин предшествующих выходящих из скважины бурильных труб.
Время нахождения бурильной трубы в скважине определяется путем вычисления интервала времени между регистрацией спуска и подъема одной и той же RFID-метки, проходящей мимо RFID-антенны.
Скорость движения бурильной трубы, а, следовательно, и всей колонны легко определяется, если известны длины и времена.
Данный способ дает информацию о глубине расположения, времени нахождения и скорости движения каждой бурильной трубы в скважине, а следовательно и всех этих параметров для бурильной колонны в целом.
Ниже приводится перечень приложенных чертежей.
Фиг. 1 - схематическое изображение бурильной колонны
1 - бурильная труба с RFID-меткой,
2 - RFID-метка,
3 - RFID-антенна,
5 - RFID-сканер,
8 - роторный стол буровой установки,
11 - взрывозащищенный ящик,
12 - устье скважины,
15 – долото.
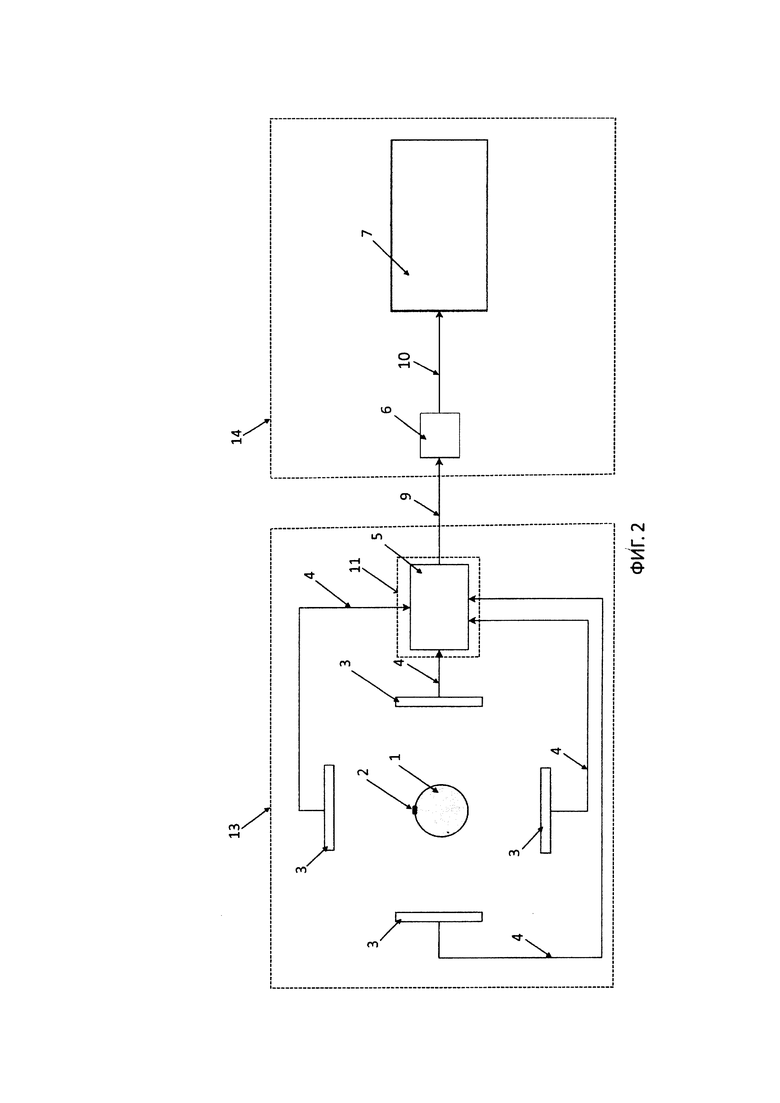
Фиг. 2 - схематическое изображение аппаратного измерительного комплекса, где
1 - бурильная труба с RFID-меткой,
2 - RFID-метка,
3 - RFID-антенна,
4 - соединительный кабель RFID-антенн с RFID-сканером,
5 - RFID-сканер,
6 - сетевой коммутатор,
7 - локальный сервер,
9 - соединительный кабель между RFID-сканером и сетевым коммутатором,
10 - соединительный кабель между сетевым коммутатором и локальным сервером,
11 - взрывозащищенный ящик,
13 - пространство под роторным столом,
14 - пространство над роторным столом.
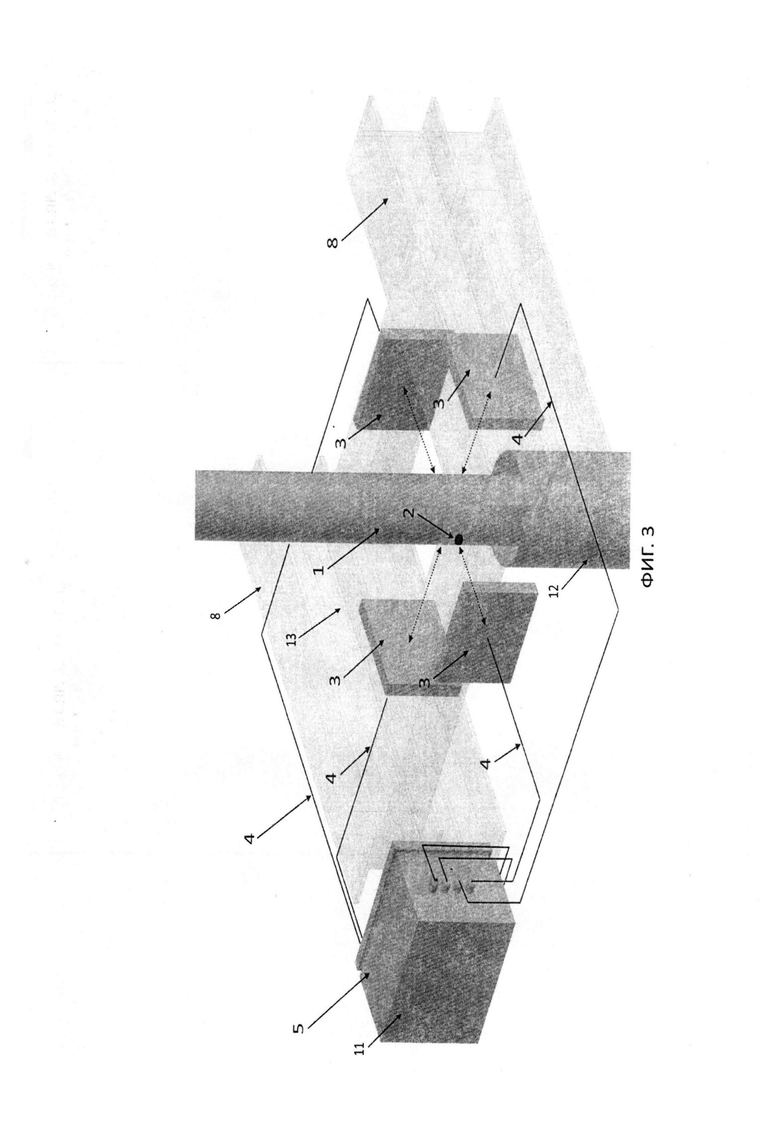
Фиг. 3 - общий вид аппаратного измерительного комплекса, где
1 - бурильная труба с RFID-меткой,
2 - RFID-метка,
3 - RFID-антенна,
4 - соединительный кабель антенн с RFID-сканером,
5 - RFID-сканер,
8 - роторный стол буровой установки,
11 - взрывозащищенный ящик,
12 - устье ствола скважины,
13 - пространство под роторным столом.
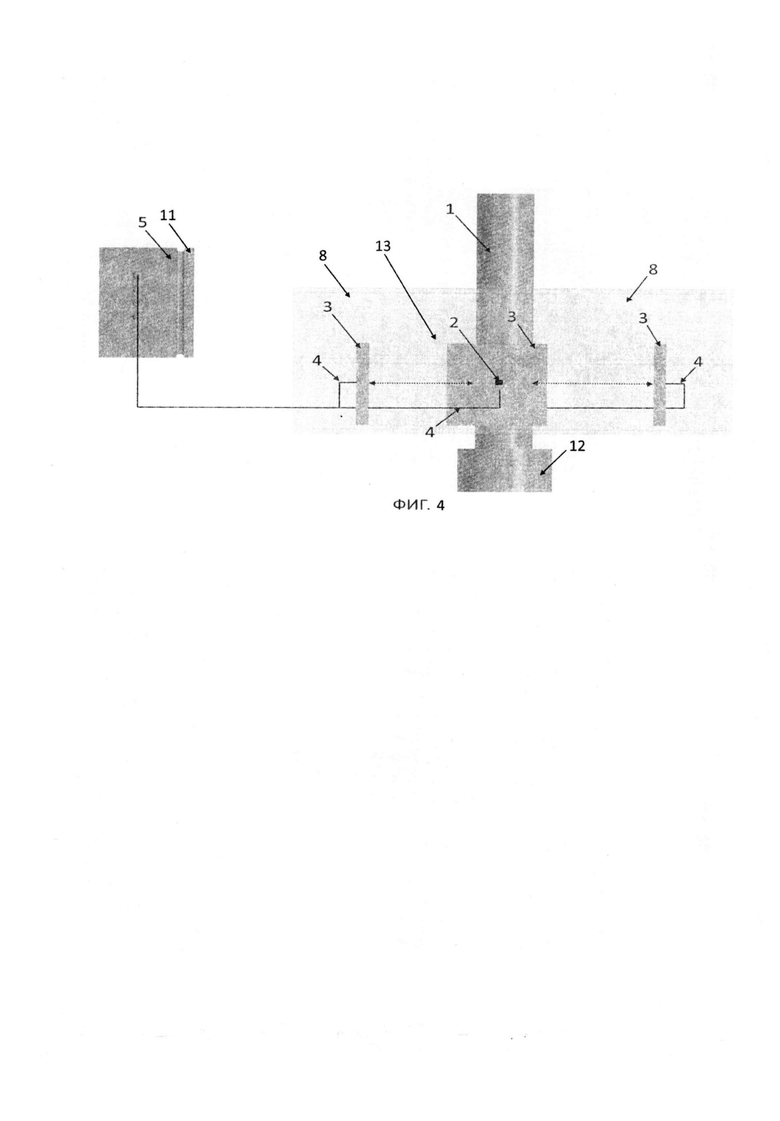
Фиг. 4 - вид сбоку аппаратного измерительного комплекса, где
1 - бурильная труба с RFID-меткой.
2 - RFID-метка,
3 - RFID-антенна,
4 - соединительный кабель RFID-антенны и RFID-сканера,
5 - RFID-сканер,
8 - роторный стол буровой установки,
11 - взрывозащищенный ящик,
12 - устье ствола скважины,
13 - пространство под роторным столом.
Ниже описывается осуществление изобретения со ссылкой на приложенные чертежи.
В устье скважины 12 (Фиг. 1, Фиг. 3, Фиг. 4), непосредственно под роторным столом 8 (Фиг. 1, Фиг. 3, Фиг. 4) монтируются RFID-антенны 2 (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4), к RFID-антеннам 2 (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4) подключается система регистрации, запоминания и обработки информации в виде RFID-сканера (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4). В механизмы и элементы, входящие в состав бурильной колонны 1 (Фиг. 1, Фиг. 3, Фиг. 4), устанавливаются радиочастотные RFID-метки 3 (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4), с помощью которых регистрирующая система RFID-сканер 5 (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4) определяет длину и время прохождения маркированной бурильной трубы 1 (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4).
При прохождении бурильной трубы 1 (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4) с установленной RFID-меткой 2 (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4) мимо RFID-антенны 3 (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4) сигнал, полученный от RFID-метки 2 (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4) передается на регистратор данных RFID-сканер 5 (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4), связанный с локальным сервером 7 (Фиг. 2) со специальным программным обеспечения «АРБИ» (на чертежах не показано), где с помощью программного обеспечения «АРБИ» рассчитываются данные о глубине, на которую спущена бурильная труба 1 (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4), время нахождения бурильной трубы 1 (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4) в скважине и скорость прохождения бурильной трубы 1 (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4) в скважине.
Сущность алгоритма, рассчитывающего скорость движения бурильной колонны при бурении или другой спускоподъемной операции, заключается в вычислении временных интервалов между регистрацией последовательно проходящих бурильных труб в составе буровой колонны с установленными RFTD-метками 2 (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4) мимо RFID-антенны 3 (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4). Определение текущей глубины спускаемой в скважину бурильной трубы 1 (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4) рассчитывается путем последовательного суммирования длин бурильных труб, следующих за бурильной трубой, для которой рассчитывается глубина. Определение текущей глубины поднимаемой из скважины бурильной трубы идет в обратном порядке - последовательным вычитанием из набранной трубой при спуске глубины длин предшествующих выходящих из скважины бурильных труб.
Время нахождения бурильной трубы в скважине определяется путем вычисления интервала времени между регистрацией спуска и подъема одной и той же RFID-метки 2 (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4), проходящей мимо RFID-антенны 3 (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4). Каждая бурильная труба имеет уникальную RFID-метку 2 (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4).
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННЫЙ ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ СЧИТЫВАНИЯ РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИОННОЙ RFID-МЕТКИ В ПРОЦЕССЕ БУРЕНИЯ | 2020 |
|
RU2769753C1 |
| СИСТЕМА ОБТИРАНИЯ ЗАМКА БУРИЛЬНОЙ ТРУБЫ | 2021 |
|
RU2772034C1 |
| Способ определения глубины погружения скважинного оборудования на трубах | 2018 |
|
RU2699095C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ БУРОВОГО ДОЛОТА ДО ЗАБОЯ СКВАЖИНЫ | 2015 |
|
RU2673244C1 |
| СПОСОБ ПРОВЕРКИ ДОСТОВЕРНОСТИ ЗНАЧЕНИЙ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ ПРОЦЕССОВ СТРОИТЕЛЬСТВА СКВАЖИНЫ | 2023 |
|
RU2815013C1 |
| СИСТЕМА, ОСНОВАННАЯ НА АНАЛИЗЕ ИЗОБРАЖЕНИЙ, ДЛЯ БУРОВЫХ РАБОТ | 2017 |
|
RU2740883C2 |
| МОДЕЛИРОВАНИЕ ПЕРЕХОДНОГО РЕЖИМА КНБК/БУРИЛЬНОЙ КОЛОННЫ В ПРОЦЕССЕ БУРЕНИЯ | 2008 |
|
RU2461707C2 |
| СИСТЕМА БУРЕНИЯ СКВАЖИНЫ С ОБРАТНОЙ СВЯЗЬЮ И ЗАМЕРОМ ГЛУБИНЫ | 2014 |
|
RU2678751C2 |
| СПОСОБ КОНТРОЛЯ ГЛУБИНЫ СПУСКА БУРИЛЬНОЙ КОЛОННЫ | 2015 |
|
RU2658183C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НЕФТЕПРОМЫСЛОВОГО ОБОРУДОВАНИЯ | 2013 |
|
RU2514870C1 |
Изобретение относится к способу определения глубины расположения, скорости прохождения и времени нахождения бурильной трубы в буровой скважине с помощью считывания RFID-метки в процессе бурения. Способ осуществляется с помощью автоматизированного измерительного комплекса для считывания RFID-метки в процессе бурения, установленного на нефтяном и газовом буровом оборудовании над устьем ствола буровой скважины, путем обработки временных интервалов между регистрацией последовательно проходящих бурильных труб известной длины с установленными RFID-метками в составе бурильной колонны мимо RFID-антенн, содержащего: радиочастотные RFID-метки, установленные в механизмы и элементы бурильной трубы, входящей в состав бурильной колонны, и передающие через RFID-антенну сигнал на RFID-сканер; измерительную систему. Указанная измерительная система состоит из: RFID-антенн, смонтированных в устье скважины непосредственно под роторным столом; стационарного RFID-сканера, закрепленного под роторным столом буровой установки, подключенного к RFID-антеннам для генерации приема сигналов от RFID-антенн; сетевого коммутатора и локального сервера с программным обеспечением, рассчитывающего глубину нахождения каждой трубы, время нахождения бурильной трубы в скважине и скорость движения бурильной трубы в скважине во время прохождения трубы с установленной на ней RFID-меткой мимо RFID-антенны; программного обеспечения, управляющего измерениями, обрабатывающего полученные данные и производящего расчеты; соединительных кабелей между RFID-антеннами и стационарным RFID-сканером. RFID-сканер в режиме онлайн получает и считывает сигнал обратного рассеивания от RFID-меток, установленных в последовательно проходящих трубах бурильной колонны, определяя тем самым момент времени прохождения трубы с RFID-меткой в автоматическом режиме, и передает информацию на локальный сервер для последующей обработки в процессе работы бурильной колонны. Локальный сервер содержит программное обеспечение, с помощью которого рассчитывается текущая глубина расположения каждой отдельной бурильной трубы колонны в скважине в каждый отдельный момент времени. Определение текущей глубины спускаемой в скважину бурильной трубы рассчитывается путем последовательного суммирования длин бурильных труб, следующих за бурильной трубой, для которой рассчитывается глубина, а определение текущей глубины поднимаемой из скважины бурильной трубы идет в обратном порядке – последовательным вычитанием из набранной трубой при спуске глубины длин предшествующих выходящих из скважины бурильных труб. С помощью программного обеспечения рассчитывается время нахождения каждой отдельной бурильной трубы колонны в скважине. Время нахождения бурильной трубы в скважине определяется путем вычисления интервала времени между регистрацией спуска и подъема одной и той же RFID-метки, проходящей мимо RFID-антенны. С помощью программного обеспечения рассчитывается скорость движения каждой отдельной бурильной трубы колонны в скважине в каждый отдельный момент времени. Скорость движения бурильной колонны при бурении или другой спуско-подъемной операции определяется расчетом временных интервалов между регистрацией последовательно проходящих бурильных труб в составе бурильной колонны с установленными RFID-метками мимо RFID-антенны. Технический результат заключается в реализации замкнутого цикла контроля работы бурильной колонны, а также в упрощенном ведении измерений и расчетов в режиме онлайн, автоматически, без участия оператора. 4 ил.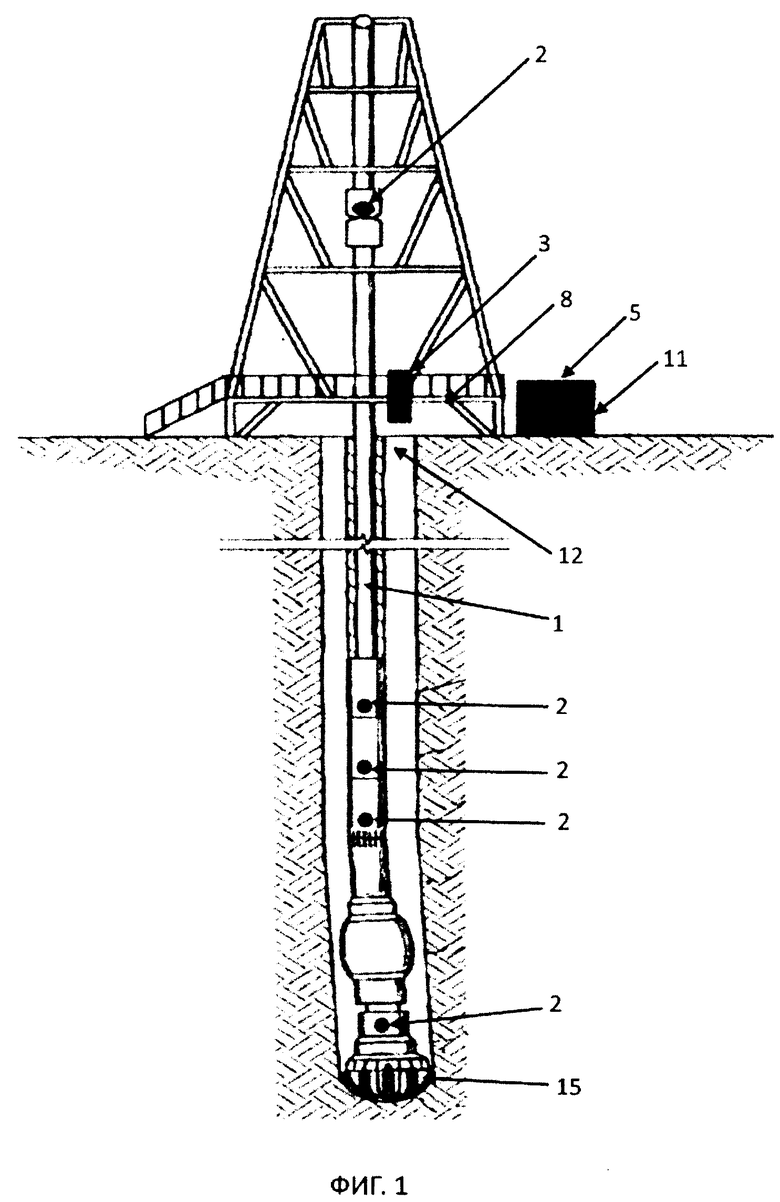
Способ определения глубины расположения, скорости прохождения и времени нахождения бурильной трубы в буровой скважине с помощью считывания RFID-метки в процессе бурения, осуществляемый с помощью автоматизированного измерительного комплекса для считывания RFID-метки в процессе бурения, установленного на нефтяном и газовом буровом оборудовании над устьем ствола буровой скважины, путем обработки временных интервалов между регистрацией последовательно проходящих бурильных труб известной длины с установленными RFID-метками в составе бурильной колонны мимо RFID-антенн, содержащего:
- радиочастотные RFID-метки, установленные в механизмы и элементы бурильной трубы, входящей в состав бурильной колонны, и передающие через RFID-антенну сигнал на RFID-сканер;
- измерительную систему, состоящую из:
- RFID-антенн, смонтированных в устье скважины непосредственно под роторным столом,
- стационарного RFID-сканера, закрепленного под роторным столом буровой установки, подключенного к RFID-антеннам для генерации приема сигналов от RFID-антенн,
- сетевого коммутатора и локального сервера с программным обеспечением, рассчитывающего глубину нахождения каждой трубы, время нахождения бурильной трубы в скважине и скорость движения бурильной трубы в скважине во время прохождения трубы с установленной на ней RFID-меткой мимо RFID-антенны,
- программного обеспечения, управляющего измерениями, обрабатывающего полученные данные и производящего расчеты,
- соединительных кабелей между RFID-антеннами и стационарным RFID-сканером,
отличающийся тем, что
- RFID-сканер в режиме онлайн получает и считывает сигнал обратного рассеивания от RFID-меток, установленных в последовательно проходящих трубах бурильной колонны, определяя тем самым момент времени прохождения трубы с RFID-меткой в автоматическом режиме, и передает информацию на локальный сервер для последующей обработки в процессе работы бурильной колонны,
- локальный сервер содержит программное обеспечение, с помощью которого рассчитывается текущая глубина расположения каждой отдельной бурильной трубы колонны в скважине в каждый отдельный момент времени,
- определение текущей глубины спускаемой в скважину бурильной трубы рассчитывается путем последовательного суммирования длин бурильных труб, следующих за бурильной трубой, для которой рассчитывается глубина, а определение текущей глубины поднимаемой из скважины бурильной трубы идет в обратном порядке – последовательным вычитанием из набранной трубой при спуске глубины длин предшествующих выходящих из скважины бурильных труб,
- с помощью программного обеспечения рассчитывается время нахождения каждой отдельной бурильной трубы колонны в скважине,
- время нахождения бурильной трубы в скважине определяется путем вычисления интервала времени между регистрацией спуска и подъема одной и той же RFID-метки, проходящей мимо RFID-антенны,
- с помощью программного обеспечения рассчитывается скорость движения каждой отдельной бурильной трубы колонны в скважине в каждый отдельный момент времени,
- скорость движения бурильной колонны при бурении или другой спуско-подъемной операции определяется расчетом временных интервалов между регистрацией последовательно проходящих бурильных труб в составе бурильной колонны с установленными RFID-метками мимо RFID-антенны.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЛИНЫ КОЛОННЫ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ И ИХ ИДЕНТИФИКАЦИИ ПРИ СПУСКОПОДЪЕМНЫХ ОПЕРАЦИЯХ | 2015 |
|
RU2593609C1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| EP 3155219 A1, 19.04.2017 | |||
| СПОСОБ И СИСТЕМА ВЫПОЛНЕНИЯ ОПЕРАЦИЙ ОБРАБОТКИ В СКВАЖИНАХ | 2001 |
|
RU2272907C2 |

