Изобретение относится к области гидроакустики, может быть использовано при решении задач обработки сигнала в пассивной гидролокации, и предназначено для определения совокупности координат шумящего объекта.
При пассивном режиме гидролокации существуют способы определения координат наблюдаемых объектов, которые традиционно условно делят на способы для ближнего и дальнего поля антенны.
Для дальнего поля известны способы [Корецкая А.С., Мельканович B.C. Патент РФ №2650830 от 28.03.2017. Устройство получения информации о шумящем в море объекте. МПК G01S 3/80, Машошин А.И., Мельканович B.C. Патент РФ №2690223 от 28.08.2018. Способ определения координат морской шумящей цели. МПК G01S 15/00], основанные на анализе задержек по времени хода между парами лучей, распространяющимися в вертикальной плоскости. Для выделения задержек измеряют автокорреляционную функцию сигнала. Эти способы позволяют одновременно определять дальность до шумящего объекта и глубину его погружения. Однако, при использовании указанных способов возникает проблема многозначности решения по расстоянию, связанная с циклическим ходом лучей при дальнем распространении звука [Какалов В.А. О реализации согласованной со средой фильтрации гидроакустического сигнала от источника // Гидроакустика. 2021, Вып. 45(1) С. 22-30], которая не преодолена.
Для ближнего поля известны способы [Патент США №4910719 от 20.03.1990. Метод пассивной звуковой телеметрии. МПК G01S 5/18, Гампер Л.Е., Попова О.С. Патент РФ №2680860 от 28.02.2019. Способ пассивного определения координат источников гидроакустического излучения. МПК G01S 3/80], или способ, описанный в книге [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. Состояние и актуальные проблемы. СПб.: Наука. 2004. С. 66-68]. Указанные способы основаны на анализе кривизны волнового фронта, для выявления которого используют несколько горизонтально расположенных антенн, и вычисляют взаимно-корреляционные функции сигналов. Для этих способов характерно одновременное определение направления на объект и дальности до объекта. Недостатком этих и других способов для ближнего поля антенны является отсутствие возможности определения глубины погружения шумящего объекта.
Известен способ [Гампер Л.Е., Ермоленко А.С., Манов К.В. Патент РФ №2507531 от 20.02.2014. Способ пассивного определения координат источников излучения. МПК G01S 3/80].
Основные операции первого пункта формулы изобретения этого способа можно сформулировать следующим образом:
фиксируют расположение нескольких (не менее трех) антенн в горизонтальной плоскости пространства,
формируют совокупность пар антенн как каждая антенна с каждой другой антенной,
формируют в поле индикации координатную сетку «направление-дальность»,
вычисляют для каждого узла координатной сетки совокупность разностей времен распространения сигнала в горизонтальной плоскости к каждой из антенн пары, как если бы источник находился в этом узле сетки,
принимают шумовой сигнал объекта каждой из антенн и осуществляют предварительную обработку сигналов,
измеряют совокупность взаимно-корреляционных функций сигнала для каждой пары антенн,
получают индикаторные показатели для каждого узла сетки, суммируя значения измеренных взаимно-корреляционных функций сигнала пар всех антенн, взятые в точках вычисленных разностей времен распространения сигнала,
выводят индикаторные показатели на координатную сетку,
определяют направление и дальность до объекта по узлу координатной сетки, в котором индикаторный показатель принимает максимальное значение.
Способ обеспечивает определение направления и дальности до шумящих объектов и их визуальное наблюдение на экране индикатора непосредственно в искомых координатах поля наблюдения «направление-дальность» в ближнем поле для совокупности антенн, разнесенных в горизонтальной плоскости. В описании способа указано, что способ может быть распространен на более общий случай решения трехкоординатной задачи. При размещении антенн в пространстве как по горизонтальной, так и по вертикальной осям, дополнительно определяется угол места, то есть направление в вертикальной плоскости, в котором наблюдается шумовой сигнал объекта. Однако из-за рефракции звуковых лучей измеренный угол места не позволяет однозначно определить глубину погружения объекта [Терминологический словарь-справочник по гидроакустике / Р.Х. Бальян, Э.В. Батаногов, А.В. Богородский и др. Л.: Судостроение. 1989]. Кроме того, размещение нескольких антенн по вертикальной оси, что необходимо для определения угла места, может вызывать сложности при необходимости их установки на подвижном носителе.
Задача изобретения определить дальность и глубину погружения для объекта, находящегося в ближнем поле с помощью совокупности горизонтально расположенных антенн.
Для решения поставленной задачи в способ пассивного определения координат шумящего объекта, в котором фиксируют расположение нескольких антенн в горизонтальной плоскости пространства, принимают шумовой сигнал объекта каждой из антенн, измеряют совокупность взаимно-корреляционных функций сигнала для каждой пары антенн, проводят анализ взаимно-корреляционных функций сигнала, и однозначно определяют дальность до объекта 
введены новые признаки, а именно:
выбирают одну из антенн в качестве основной,
расположение основной антенны фиксируют в вертикальной плоскости,
измеряют вертикальное распределение скорости звука в среде,
формируют в поле индикации координатную ось «глубина» (h), отсчеты которой z располагают с фиксированными интервалами дискретности и ограничивают глубинами наблюдения от минимального до максимального значений,
осуществляют прогнозный расчет лучевой структуры сигнала в вертикальной плоскости на входе основной антенны, в результате которого определяют совокупность звуковых лучей, достигающих измеренной дальности  и формируют для каждого отсчета по глубине z свой массив расчетных задержек по времени хода между всеми парами лучей Δz(j), где
и формируют для каждого отсчета по глубине z свой массив расчетных задержек по времени хода между всеми парами лучей Δz(j), где  - номер пары лучей,
- номер пары лучей,  - общее количество лучей, соединяющих основную антенну и точку с координатами по дальности
- общее количество лучей, соединяющих основную антенну и точку с координатами по дальности  и глубине hz,
и глубине hz,
измеряют автокорреляционную функцию сигнала G(τ) для основной антенны, получают индикаторный показатель В для каждого отсчета по глубине z, суммируя значения автокорреляционной функции сигнала С(τ), взятые в точках массива расчетных задержек по времени хода между всеми парами лучей: 
выводят индикаторные показатели Βζ на координатную ось,
определяют глубину объекта по отсчету координатной оси, в котором индикаторный показатель принимает максимальное значение: 
Техническим результатом изобретения является однозначное определение глубины погружения объекта по однозначно определенной дальности до него при их визуальном наблюдении на экране индикатора
Покажем возможность достижения указанного технического результата предложенным способом.
Способ основан на одновременном использовании физических основ распространения звука в ближнем и дальнем поле. Здесь уместно уточнить, что граница между ближним и дальнем полем не фиксирована конкретным расстоянием. Ближнее поле распространяется до расстояния от антенны, пропорционального размеру апертуры антенной базы (совокупности антенн) в квадрате [Терминологический словарь-справочник по гидроакустике / Р.Х. Бальян, Э.В. Батаногов, А.В. Богородский и др. Л.: Судостроение. 1989]. При малом размере антенной базы граница, разделяющая ближнюю и дальнюю зоны, находится ближе к антенне относительно аналогичной границы при большом размере антенной базы.
Наличие совокупности горизонтально размещенных антенн, то есть относительно большой антенной базы, позволяет использовать физические основы определения координат объекта в ближнем поле, то есть по анализу кривизны волнового фронта однозначно определить дальность до объекта. Когда мы выбираем одну антенну в качестве основной, апертура антенной базы (одной антенны) становится меньше относительно совокупности антенн, и граница между ближним и дальнем полем сдвигается в сторону к антенне. Становится возможным использование физических основ определения координат объекта уже в дальнем поле. Тогда на основании анализа автокорреляционной функции сигнала в новых процедурах способа исследуются задержки по временам хода между парами лучей, распространяющимися в вертикальной плоскости, что позволяет определить, наряду с дальностью, глубину погружения объекта. При этом, для анализа задержек по временам хода достаточно иметь одну антенну, расположение которой зафиксировано в вертикальной плоскости, и не требуется использование нескольких антенн, разнесенных по вертикальной оси.
Использование в прогнозных расчетах лучевой структуры сигнала именно одной однозначно измеренной дальности  позволяет обеспечить однозначность оценки глубины. Это достигается за счет того, что известная цикличность хода лучей в дальнем поле ограничивается конкретным значением дальности, полученным с использованием физических основ ближнего поля, и зависимость задержки по временам хода между парами лучей от глубины погружения становится однозначной. На это указывают результаты работы [Какалов В.А. О реализации согласованной со средой фильтрации гидроакустического сигнала от источника // Гидроакустика. 2021, Вып. 45(1) С. 22-30].
позволяет обеспечить однозначность оценки глубины. Это достигается за счет того, что известная цикличность хода лучей в дальнем поле ограничивается конкретным значением дальности, полученным с использованием физических основ ближнего поля, и зависимость задержки по временам хода между парами лучей от глубины погружения становится однозначной. На это указывают результаты работы [Какалов В.А. О реализации согласованной со средой фильтрации гидроакустического сигнала от источника // Гидроакустика. 2021, Вып. 45(1) С. 22-30].
При этом, реализация предлагаемых процедур для определения глубины выбрана такой, когда наряду с оценкой глубины возможно получить индикаторный показатель, что позволяет осуществлять визуальное наблюдение глубины на специализированной оси.
Таким образом, совокупность процедур предложенного способа, реализующих физические основы определения координат объекта, как в дальнем, так и в ближнем поле, позволяет одновременно и однозначно определять дальность до объекта и глубину погружения объекта с одновременной визуализацией решения. При этом, при использовании предлагаемого способа совместно со способом [Патент РФ №2507531] можно получить одновременное определение трех координат объекта: направление, дальность и глубина.
Сущность изобретения поясняется фиг. 1, на которой изображена укрупненная блок-схема устройства, реализующего предлагаемый способ в связке со способом [Патент РФ №2507531]. Способ технически реализуется аппаратно-программными средствами по структурной схеме, приведенной на фиг. 1. Структурная схема включает последовательно соединенные блоки: Антенны 1, блок 2 вычисления взаимно-корреляционных функций сигнала (ВКФ), блок 3 определения индикаторных показателей по ВКФ (∑ 1), блок 4 индикатор «направление-дальность» (ИНД 1), блок 5 гидрологических расчетов (ГР), блок 6 определения индикаторных показателей по АКФ (∑ 2), блок 7 индикатор «глубина» (ИНД 2). Второй выход блока 1 (Антенны) подключен ко входу блока 8 вычисления автокорреляционной функции сигнала (АКФ), выход которого подключен ко второму входу блока 6. Блок 9 тригонометрических расчетов (TP) подключен ко второму входу блока 3 (∑ 1).
С помощью аппаратуры (фиг. 1) заявленный способ реализуется следующим образом. Предварительно в блоке 4 ИНД 1 формируют поле индикации «направление-дальность» (α, D) с фиксированными интервалами дискретности и узлами pq, а в блоке 9 TP определяют совокупность пар антенн mn и вычисляют для каждого узла координатной сетки pq совокупность разностей времен распространения сигнала в горизонтальной плоскости tpq(mn) к каждой из антенн пары mn, как если бы источник находился в узле сетки с координатами по направлению αр и по расстоянию Dq. Процедуры, выполняемые в блоках 4 и 9, заимствуются из способа [Патент РФ №2507531]. Далее предварительно в блоке 8 ИНД 2 формируют в поле индикации координатную ось «глубина» (h), отсчеты которой z располагают с фиксированными интервалами дискретности и ограничивают глубинами наблюдения от минимального до максимального значений. Здесь максимальное значение может быть ограничено глубиной моря или известной максимально возможной глубиной погружения интересующего объекта поиска. Интервалы дискретности могут быть выбраны, исходя из необходимой точности оценки глубины.
В процессе работы шумовой гидроакустический сигнал принимается совокупностью из Μ антенн 1, где осуществляется его предварительная обработка, и поступает в блок 2 ВКФ одновременно от всех антенн и в блок 8 АКФ от одной основной антенны. В блоке 2 измеряют совокупность взаимно-корреляционных функций сигнала Cmn(τ) для каждой пары антенн. В блоке 8 измеряют автокорреляционную функцию сигнала G(τ) для основной антенны. Совокупность взаимно-корреляционных функций сигнала из блока 2 поступает в блок 3 ∑ 1, а автокорреляционная функция сигнала из блока 8 поступает в блок 6.
Одновременно в блок 3 поступают расчетные параметры из блока 9. В блоке 3, согласно [Патент РФ №2507531], получают индикаторный показатель А для каждого узла сетки pq, суммируя значения взаимно-корреляционных функций сигнала пар всех антенн Cmn(τ), взятые в точках вычисленных разностей времен распространения сигнала tpq(mn):  и передают индикаторный показатель в блок 4 ИНД 1. В блоке 4 выводят индикаторные показатели Apq на координатную сетку поля индикации «направление-дальность», и определяют направление и дальность до объекта по узлу координатной сетки, в котором индикаторный показатель принимает максимальное значение:
и передают индикаторный показатель в блок 4 ИНД 1. В блоке 4 выводят индикаторные показатели Apq на координатную сетку поля индикации «направление-дальность», и определяют направление и дальность до объекта по узлу координатной сетки, в котором индикаторный показатель принимает максимальное значение:  Далее измеренная дальность
Далее измеренная дальность  поступает в блок 5 ГР.
поступает в блок 5 ГР.
В блоке 5 ГР измеряют вертикальное распределение скорости звука в среде, используя, например, измерители скорости звука, которые серийно выпускаются и устанавливаются совместно с гидроакустической аппаратурой [Комляков В.А. Корабельные средства измерения скорости звука и моделирование акустических полей в океане. СПб.: Наука. 2003. С. 169-227], и осуществляют прогнозный расчет лучевой структуры сигнала в вертикальной плоскости на входе основной антенны, используя результаты работы [Авилов К.В., Добряков Н.А., Попов О.Е. Комплекс программных средств для вычисления звуковых полей в морской среде, неоднородной по глубине и трассе распространения // Акустика океана. Доклады X школы-семинара акад. Л.М. Бреховских. М.: ГЕОС, 2004. С. 27]. После этого в блоке 5 определяют совокупность тех звуковых лучей, которые достигают измеренной дальности  и формируют для каждого отсчета по глубине z свой массив расчетных задержек по времени хода между всеми парами лучей Δz(j), где
и формируют для каждого отсчета по глубине z свой массив расчетных задержек по времени хода между всеми парами лучей Δz(j), где  - номер пары лучей,
- номер пары лучей,  - общее количество лучей, соединяющих основную антенну и точку с координатами по дальности
- общее количество лучей, соединяющих основную антенну и точку с координатами по дальности  и глубине hz. Полученный массив расчетных задержек для измеренной дальности из блока 5 поступает в блок 6 ∑ 2. Одновременно в блок 6 поступает автокорреляционная функция сигнала G(τ), принятого на основную антенну, из блока 8. В блоке 6 получают индикаторный показатель В для каждого отсчета по глубине z, суммируя значения автокорреляционной функции сигнала G(τ), взятые в точках массива расчетных задержек по времени хода между всеми парами лучей Δz(j):
и глубине hz. Полученный массив расчетных задержек для измеренной дальности из блока 5 поступает в блок 6 ∑ 2. Одновременно в блок 6 поступает автокорреляционная функция сигнала G(τ), принятого на основную антенну, из блока 8. В блоке 6 получают индикаторный показатель В для каждого отсчета по глубине z, суммируя значения автокорреляционной функции сигнала G(τ), взятые в точках массива расчетных задержек по времени хода между всеми парами лучей Δz(j):  и передают индикаторный показатель в блок 7 ИНД 2. В блоке 7 выводят индикаторные показатели Βz на координатную ось и определяют глубину объекта по отсчету координатной оси, в котором индикаторный показатель принимает максимальное значение:
и передают индикаторный показатель в блок 7 ИНД 2. В блоке 7 выводят индикаторные показатели Βz на координатную ось и определяют глубину объекта по отсчету координатной оси, в котором индикаторный показатель принимает максимальное значение: 
Все изложенное позволяет считать задачу изобретения решенной. Предложен способ пассивного определения координат шумящего объекта, предназначенный для определения совокупности координат шумящего объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения полной совокупности координат морского шумящего объекта | 2023 |
|
RU2817558C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩИХ МОРСКИХ ОБЪЕКТОВ | 2022 |
|
RU2810106C2 |
| Способ локализации в пространстве шумящего в море объекта | 2023 |
|
RU2816480C1 |
| Способ локализации в пространстве шумящего в море объекта | 2022 |
|
RU2788341C1 |
| Способ получения информации о подводном шумящем объекте | 2022 |
|
RU2803528C1 |
| Способ определения глубины погружения шумящего в море объекта | 2023 |
|
RU2816481C1 |
| Способ определения координат морской шумящей цели | 2022 |
|
RU2798416C1 |
| Способ пассивного определения координат шумящего в море объекта | 2022 |
|
RU2797780C1 |
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2015 |
|
RU2602732C1 |
| Способ определения координат шумящих объектов с использованием вертикально развитых бортовых антенн гидроакустических комплексов | 2023 |
|
RU2820807C1 |

Изобретение относится к области гидроакустики, и служит для решения задач обработки сигнала в пассивной гидролокации, и предназначено для определения совокупности координат шумящего объекта. Технический результат - однозначное определение глубины погружения объекта по однозначно определенной дальности до него при их визуальном наблюдении на экране индикатора. Способ основан на приеме гидроакустического шумового сигнала объекта совокупностью нескольких антенн, расположенных в горизонтальной плоскости, когда фронт волны может быть принят сферическим, анализ взаимно-корреляционных функций принятого сигнала позволяет определить дальность до объекта, при реализации способа дополнительно проводят анализ автокорреляционной функции сигнала, принятого на одну основную антенну, основанный на сопоставлении с временными параметрами прогнозного расчета лучевой структуры сигнала в вертикальной плоскости, дополнительные процедуры позволяют определить глубину погружения объекта. 1 ил.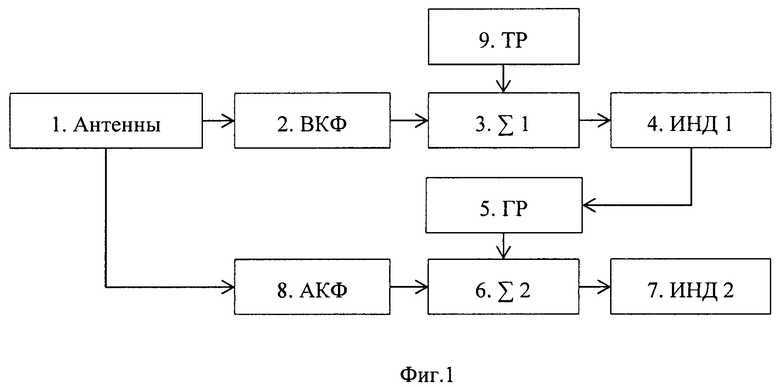
Способ пассивного определения координат шумящего объекта, в котором фиксируют расположение нескольких антенн в горизонтальной плоскости пространства, принимают шумовой сигнал объекта каждой из антенн, измеряют совокупность взаимно-корреляционных функций сигнала для каждой пары антенн, проводят анализ взаимно-корреляционных функций сигнала и однозначно определяют дальность до объекта  в котором выбирают одну из антенн в качестве основной, расположение основной антенны фиксируют в вертикальной плоскости, измеряют вертикальное распределение скорости звука в среде, формируют в поле индикации координатную ось «глубина» (h), отсчеты которой z располагают с фиксированными интервалами дискретности и ограничивают глубинами наблюдения от минимального до максимального значений, осуществляют прогнозный расчет лучевой структуры сигнала в вертикальной плоскости на входе основной антенны, в результате которого определяют совокупность звуковых лучей, достигающих измеренной дальности
в котором выбирают одну из антенн в качестве основной, расположение основной антенны фиксируют в вертикальной плоскости, измеряют вертикальное распределение скорости звука в среде, формируют в поле индикации координатную ось «глубина» (h), отсчеты которой z располагают с фиксированными интервалами дискретности и ограничивают глубинами наблюдения от минимального до максимального значений, осуществляют прогнозный расчет лучевой структуры сигнала в вертикальной плоскости на входе основной антенны, в результате которого определяют совокупность звуковых лучей, достигающих измеренной дальности  и формируют для каждого отсчета по глубине z свой массив расчетных задержек по времени хода между всеми парами лучей Δz(j), где
и формируют для каждого отсчета по глубине z свой массив расчетных задержек по времени хода между всеми парами лучей Δz(j), где  - номер пары лучей,
- номер пары лучей,  - общее количество лучей, соединяющих основную антенну и точку с координатами по дальности
- общее количество лучей, соединяющих основную антенну и точку с координатами по дальности  и глубине hz, измеряют автокорреляционную функцию сигнала G(τ) для основной антенны, получают индикаторный показатель В для каждого отсчета по глубине z, суммируя значения автокорреляционной функции сигнала G(τ), взятые в точках массива расчетных задержек по времени хода между всеми парами лучей:
и глубине hz, измеряют автокорреляционную функцию сигнала G(τ) для основной антенны, получают индикаторный показатель В для каждого отсчета по глубине z, суммируя значения автокорреляционной функции сигнала G(τ), взятые в точках массива расчетных задержек по времени хода между всеми парами лучей:  выводят индикаторные показатели Bz на координатную ось, определяют глубину объекта по отсчету координатной оси, в котором индикаторный показатель принимает максимальное значение:
выводят индикаторные показатели Bz на координатную ось, определяют глубину объекта по отсчету координатной оси, в котором индикаторный показатель принимает максимальное значение: 
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ | 2012 |
|
RU2507531C1 |
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2015 |
|
RU2602732C1 |
| EP 3441790 A1, 13.02.2019 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ЭЛЕКТРОННЫХ УСТРОЙСТВ | 2012 |
|
RU2501035C1 |
| US 4910719 A1, 20.03.1990. | |||
